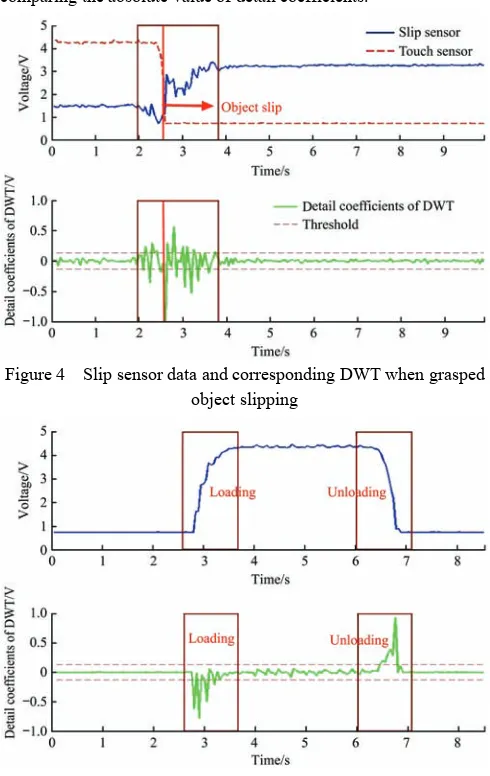
Slipping detection and control in gripping fruits and vegetables for agricultural robot
Full text
Figure




Related documents
This essay asserts that to effectively degrade and ultimately destroy the Islamic State of Iraq and Syria (ISIS), and to topple the Bashar al-Assad’s regime, the international
For the purpose of the present literature review, two meta-analyses (Baer, 2003; Hofmann et al., 2010) that explore the use of mindfulness-based therapy in addressing
The total coliform count from this study range between 25cfu/100ml in Joju and too numerous to count (TNTC) in Oju-Ore, Sango, Okede and Ijamido HH water samples as
innovation in payment systems, in particular the infrastructure used to operate payment systems, in the interests of service-users 3.. to ensure that payment systems
The small premature infant who has undergone a sur gical procedure and would have to be fed by gavage is much more easily and safely fed through a gastrostomy tube (Fig. 2)..
19% serve a county. Fourteen per cent of the centers provide service for adjoining states in addition to the states in which they are located; usually these adjoining states have
Standardization of herbal raw drugs include passport data of raw plant drugs, botanical authentification, microscopic & molecular examination, identification of
We couldn’t start with Valentine’s entrance (scene 14) as it looked out the door. Instead, we shot Zia’s appearance first. The first shot of the day proved to be more difficult than
