R E S E A R C H
Open Access
Fuzzy
H
∞
output-feedback control for the
discrete-time system with channel fadings,
sector nonlinearities, and randomly occurring
interval delays and nonlinearities
Xiaozheng Fan
1, Yan Wang
2and Manfeng Hu
1,3**Correspondence:
1School of Science, Jiangnan
University, Wuxi, 214122, China
3Key Laboratory of Advanced
Process Control for Light Industry, Ministry of Education, Institute of Automation, Jiangnan University, Wuxi, 214122, China
Full list of author information is available at the end of the article
Abstract
In this paper, the fuzzyH∞output-feedback control problem is investigated for a class of discrete-time T-S fuzzy systems with channel fadings, sector nonlinearities,
randomly occurring interval delays (ROIDs) and randomly occurring nonlinearities (RONs). A series of variables of the randomly occurring phenomena obeying the Bernoulli distribution is used to govern ROIDs and RONs. Meanwhile, the measurement outputs are subject to the sector nonlinearities (i.e.the sensor
saturations) and we assume the system output isy(k) = 0,k∈ {–l,. . ., 0}. TheLth-order Rice model is utilized to describe the phenomenon of channel fadings by setting different values of the channel coefficients. The aim of this work is to deal with the problem of designing a full-order dynamic fuzzyH∞output-feedback controller such that the fuzzy closed-loop system is exponentially mean-square stable and theH∞
performance constraint is satisfied, by means of a combination of Lyapunov stability theory and stochastic analysis along with LMI methods. The proposed fuzzy controller parameters are derived by solving a convex optimization problem via the
semidefinite programming technique. Finally, a numerical simulation is given to illustrate the feasibility and effectiveness of the proposed design technique.
Keywords: Takagi-Sugeno (T-S) fuzzy system; fuzzyH∞output-feedback control; channel fadings; sector nonlinearities; randomly occurring interval delays (ROIDs); randomly occurring nonlinearities (RONs)
1 Introduction
It is well known that the complexity and nonlinearity of the models are considered as ubiq-uitous in practical systems. The emergence of this fuzzy modeling approach is based on the Takagi-Sugeno (T-S) fuzzy system (see []), which provides a powerful tool for modeling complex nonlinear systems. TheH∞output-feedback control problem for the T-S fuzzy system has received considerable attention (see [–]). Nevertheless, the nonlinearity of the T-S fuzzy subsystem is inevitable in practical applications, along with the fact, that the T-S fuzzy model has been successfully used in complex nonlinear systems (see [–]). The authors of [] assumed the nonlinear function in the T-S fuzzy cellular neural networks
satisfied the -Lipschitz condition and researched the global exponential stability problem for T-S fuzzy cellular neural networks.
In the past decade, networked control systems (NCSs) have played an important role in many engineering applications such as remote militarization, remote medical service, and so on (see [–]). However, there are some unavoidable phenomena for the NCSs which may cause poor performance of the controlled systems, for instance, the signal is often transmitted through networks which might be subjected to the occurrence of the phenomenon of incomplete information. The considered incomplete information mainly includes the ROIDs (see []), RONs (see []), channel fadings (see [, ]), and sector nonlinearities (see [, ]). The nonlinear output-feedback controller design for poly-nomial system has been studied (see [, ]). A full-order dynamicH∞output-feedback controller was designed by [] for the time-varying delays case when all state variables are not available for the feedback. Further, the author of [] has researched theH∞ output-feedback controller design problem for networked systems with random communication delays by using a linear matrix inequality (LMI) approach. TheH∞output-feedback con-trol problem for a class of discrete-time systems with RONs has been investigated in [], where random variables are adopted to characterize the RONs and satisfy the binary distri-bution. The designingH∞output-feedback controller problems for the T-S fuzzy system with randomly occurring phenomena have been studied in [, ]. However, in the case when ROIDs and RONs appear simultaneously in a controlled system, the designing of the fuzzyH∞output-feedback control problem has received little attention by researchers.
In practical applications, the phenomena of the channel fadings and sector nonlinear-ities based on unreliable communication networks could occur, which should not be ig-nored. Considering the situation of signal transmission in fading channels, theH∞ output-feedback control problem with channel fadings has been studied (see []). The channel fading has been modeled as a time-varying stochastic model which can describe the trans-mitted signal’s change in both the amplitude and the phase. The channel fadings with ex-ogenous input disturbance in wireless mobile communications has not been researched extensively (see [, ]). On the other hand, the sector nonlinearities of the sensors are usually in order in practical industrial control systems, and this is the main factor that gives rise to the nonlinearity of control systems (see []). Since the sensor nonlinearity cannot be neglected and often leads to bad performance of the discrete-time control system, it has attracted the attention of researchers (see [–]).
In [], theH∞ output-feedback control problem for a class of discrete-time systems with channel fadings and sector nonlinearities has been studied, and the existence of the desired controllers has been derived via using a combination of the stochastic analysis and Lyapunov function approach. The design ofH∞ fuzzy controller problem for the fuzzy system with the probabilistic infinite-distributed delay and the channel fadings also has been investigated in [], where the channel fading model can better reflect the reality of measurement transmission especially through a wireless sensor network. So far, to the best of the authors’ knowledge, the fuzzyH∞output-feedback control problem for a class of discrete-time T-S fuzzy system with channel fadings, sector nonlinearities, ROIDs and RONs have not been investigated yet, and the main purpose of this paper is to bridge such a gap.
for describing the discrete-time fuzzy model. () Moreover, a newly fuzzy control system as well as measurement model is put forward which can account for the randomly occur-ring incomplete information phenomena of the sensor saturation and the channel fadings. () A new fuzzyH∞output-feedback controller has been designed.
Motivated by the above discussion, this paper intends to study the fuzzyH∞ output-feedback control problem for a class of discrete-time Takagi-Sugeno (T-S) fuzzy model system with channel fadings, sector nonlinearities, ROIDs, and RONs. The rest of this pa-per is organized as follows. In the next section, the problem descriptions of the discrete-time T-S fuzzy system with ROIDs, RONs, sector nonlinearities, and channel fadings are stated, and the necessary definitions and relevant lemmas are recalled. Section presents the main results of this paper. Illustrative examples are provided in Section . Finally, con-clusions are drawn in Section .
2 Model description and preliminaries
In this paper, we consider the following discrete-time fuzzy system with RONs and ROIDs is described by the following fuzzy IF-THEN rules:
Plant Rule i: IFθ(k) isMiandθ(k) isMi, . . . , andθr(k) isMir, THEN
⎧ ⎪ ⎨ ⎪ ⎩
x(k+ ) =Aix(k) +Ai
h
mβm(k)x(k–τm(k)) +Biu(k) +Diω(k) +r(k)f(x(k)), z(k) =Eix(k) +Diω(k),
x(s) =φ(s), s= –h, –h+ , . . . , , ,
()
wherei= , . . . ,r, the system () is equivalent to a fuzzy combination ofrsubsystems.Mij
is the fuzzy set,θ(k) = [θ(k),θ(k), . . . ,θr(k)] is the premise variable vector.x(k)∈Rnis
the state vector withx() =φ(),u(k)∈Rr is the control input vector,z(k)∈Rq is the
controlled output vector,ω(k)∈l([, +∞),Rn) is the exogenous disturbance input.φ(s) is the initial state.Ai,Ai,Bi,Di,Ei, andDi are known real matrices with appropriate
dimensions.
To characterize the phenomena of randomly occurring interval delays and randomly occurring nonlinearities, we employ the stochastic variablesβm(k) (m= , . . . ,h) andr(k)
in (), which are mutually independent Bernoulli-distributed white sequences with the following probability distribution:
Probβm(k) =
=Eβm(k)
=β¯m,
Probβm(k) =
= –β¯m,
Probr(k) = =Er(k)=r¯,
Probr(k) = = –r¯.
The variableτm(k) (m= , , . . . ,h) means the time-varying delays satisfying
dm≤τm(k)≤ ¯dm, ()
wheredmandd¯mare real positive integers representing the lower bounds and the upper
Assumption The nonlinear vector-valued functionf(x(k)) :Rn→Rnwithf() = is
seen as continuous and satisfies the following sector-bounded condition:
fx(k) ≤λ Gx(k) ()
for allk∈[,N], whereλ> is a known positive scalar andGis a known real matrix. Remark In model (), the stochastic variablesr(k) is used for characterizing the phe-nomena of RONs. The T-S fuzzy model with RONs includes the fuzzy model with nonlin-earity in [, ] as a special case where the values ofr(k) are . Note that RONs is considered for the first time for fuzzy output-feedback control problem. On the other hand, the oc-currence of the ROIDsx(k–τm(k)) is characterized by the random variablesβm(k) in a
probabilistic way, which is more suitable for reflecting the network-induced phenomena. Meanwhile, it is worth of note that there are some results concerned with the continuous time-varying delays in [, ] and few results for randomly occurring interval delays, es-pecially when the fuzzyH∞output-feedback control problem becomes a research focus.
Let us now consider the case when the phenomena of the sector nonlinearities and the channel fadings may occur in signal transmission, where the system output is subject to sector-like bounds and the sensor signal sent to the actuator subject to channel fadings for the control purpose. The signal received by the actuator is modeled in the following:
y(k) =g(x(k)),
ξ(k) = l=αl(k)y(k–l) +ν(k),
()
wherey(k)∈Rnrepresents the system output withy(k) = ,∀k∈ {–l, . . . , },g(x(k)) is the
sector nonlinearity of the sensor,ξ(k)∈Rn is the signal from the actuator, and ν(k)∈ l([, +∞),Rn) is an external disturbance.αl(k)∈R(l= , , . . . , ) is the channel coefficient
which is independent and conform Gaussian random variables distributed with meanα¯l
and varianceα˜l. In practice, the channel coefficients typically take values over the interval [, ].
Assumption The nonlinear functiong(x(k)) in () represents the sector nonlinearities satisfying the following sector condition:
gx(k)–Mx(k) T
gx(k)–Mx(k)
≤, ()
whereMandM(M>M≥) are known real matrices with appropriate dimensions. Remark In this paper, the channel fadings and sector nonlinearities of the sensors can be described simultaneously by the model () in the measurement. In [], this Rice fadings model can properly describe the phenomena of the channel fadings, time-delay, and date dropout, therefore the fadings model can be employed in this paper for the design of the
H∞fuzzy output-feedback controller of the discrete-time fuzzy system.
syn-thesis problems for a series of dynamics systems with sector nonlinearities has been in-vestigated in [, ]. Particularly, the nonlinear function lies inside the sector [M,M] in []. Furthermore, the Lipschitz condition can be concluded by the nonlinear description as a special case ifM= orM= in Assumption .
Assumption ([]) For technical convenience, the nonlinear functiong(x(k)) can be
decomposed into a linear and a nonlinear parts as
gx(k)=gs
x(k)+Mx(k), ()
where the nonlinear partgs(x(k)) belongs to the setGsdefined by
Gs=
gs
x(k):gsTx(k)gs
x(k)–Mx(k)≤ ()
withM=M–M> .
In this paper, we adopt a full-order fuzzy output-feedback controller for the discrete-time system by the fuzzy IF-THEN rules as follows:
Control rule i: IFθ(k) isMiandθ(k) isMi, . . . , andθr(k) isMir, THEN
xc(k+ ) =Acixc(k) +Bciξ(k), u(k) =Ccixc(k),
()
wherexc(k)∈Rnis the state estimate of system (), andAci,Bci,Cciare appropriately
di-mensioned parameters matrices to be determined. Set
hi
θi(k)
=
r
j=Mij(θj(k))
r i=
r
j=Mij(θj(k))
, ()
whereMij(θj(k)) denotes the grade of membership ofθj(k) inMij. Obviously,hi(θ(k))≥,
andri=hi(θ(k)) = . To ease the presentation, we usehiinstead ofhi(θ(k)).
Above all, the T-S fuzzy system () model can be constructed as follows:
⎧ ⎪ ⎨ ⎪ ⎩
x(k+ ) =ri=hi{Aix(k) +Ai
h
mβm(k)x(k–τm(k)) +Biu(k)
+Diω(k) +r(k)f(x(k))}, z(k) =ri=hi{Eix(k) +Diω(k)}.
()
Furthermore, the fuzzy control system can be described by
xc(k+ ) =
r
i=hi{Acixc(k) +Bciξ(k)}, u(k) =ri=hiCcixc(k).
Combining (), (), (), and (), the fuzzy control system can be represented by
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
η(k+ ) =ri=rj=hihj{ ¯Aijη(k) +A¯i
h
m=β¯mZη(k–τm(k))
+A¯i
h
m=β˜m(k)Zη(k–τm(k)) +Dijω˜(k) +r¯F(η(k)) +r˜(k)F(η(k))
+ l=α¯lB¯jZη(k–l) + l=α˜l(k)B¯(j)Zη(k–l) + l=α¯lB˜jgv(Zη(k–l)) + l=α˜l(k)B˜jgv(Zη(k–l))}, zk=ri=
r
j=hihj{Eiη(k) +Djω˜(k)},
()
where
η(k) =xT(k),xTc(k)T, ω˜=ωT(k),νT(k)T, Fη(k)=
f(x(k))
,
¯
Aij=
Ai BiCcj
¯
αBcjM Acj
, A¯i=
Ai
, Z= [In ],
¯
Bj=
BcjM
, B˜j=
Bcj
, Ei= [Ei ],
Dij=
Di o Bcj
, Dj= [Dj ],
with
˜
α(k) =α(k) –α¯;
˜
βm(k) =βm(k) –β¯m;
˜
r(k) =r(k) –¯r.
Obviously
Eα˜(k)= , Eα˜(k)α˜l (l= , , . . . , );
Eβ˜m(k)
= , Eβ˜m(k)=β¯m( –β¯m)β˜m (m= , . . . ,h);
Er˜(k)= , Er˜(k)=¯r( –r¯)˜r.
Particularly, we can see from Assumption that the nonlinear functionF(η(k)) satisfies the following formula:
FTη(k)Fη(k)≤ληT(k)GTGη(k), ()
whereG= (G, ).
To describe our main result more precisely, we first introduce the following definition and lemmas.
Definition (Exponentially mean-square stability []) The T-S fuzzy control system
be exponentially mean-square stable if, in the case ofω˜(k) = , then exist constantsδ> and << such that
E η(k) ≤δksup
i∈K
E φ(i) , ∀k≥. ()
With Definition , the aim of this paper is to design a robustH∞output-feedback con-troller in the form of () such that the fuzzy discrete-time system () is exponentially mean-square stable and theH∞performance is satisfied or, more specifically, the follow-ing two requirements are satisfied simultaneously:
(R) The fuzzy discrete-time system () is exponentially mean-square stable. (R) Under the zero-initial condition, the controlled outputz(k) satisfies
∞
k=
E z(k) ≤γ
∞
k=
E ω˜(k) ()
for all nonzeroω˜(k), whereγ > is a prescribed scalar.
Lemma (Schur complement []) We have the linear matrix inequality
S=
S S
ST S
< ,
where S=STand S=STare equivalent to
S< , S–STS–S< .
Lemma ([]) For a symmetric positive definite S,and any real matrices X(ijp)with
ap-propriate dimensions,we can get
r
i=
r
j=
r
s=
r
t=
hihjhsht(X(ij))TSX(st)≤
r
i=
r
j=
hihj(X(ij))TSX(ij).
Lemma ([]) Given any matrices x,y,a matrix P> ,and a positive scalar,then we have
xTy≤xTPx+–yTPy. 3 Main result
In this part, the following theorem provides a sufficient condition for the discrete-time T-S fuzzy system () to be exponentially mean-square stable and the controlled output
zkto satisfy theH∞disturbance reject requirement in ().
Theorem Let a scalarγ > and the controller parameters matrix Acj,Bcj,and Ccj(j=
, . . . ,r)be given.The fuzzy closed-loop system()is exponentially men-square stable and the controlled output z(k)satisfies(),if there exist matrices P> ,Qm> ,and Rl>
(m= , . . . ,h;l= , , . . . , ),and a positive scalarψ> andϕ> satisfying
ϒij+ϒji< , ()
Proof We choose the following Lyapunov function:
+
+ η(k)TA¯TijP
Also, it can be seen that
≤E
For notational convenience, we have
≤E exponentially mean-square stable as can be seen in the same way as in [].
Now let us dispose of theH∞ performance for the system (). For this purpose, we establish a cost function
J(n) =E
Along the trajectory of the fuzzy discrete-time system () and taking () into
consid-By using the Schur complement lemma, the conclusion can be drawn from () and () that J(n) < . Lettingn→ ∞, it follows from the above inequality that
which completes the proof of Theorem .
Theorem Let the H∞disturbance attenuation levelγ > be given.A desired controller
the controller parameters in the form of()are given in the following:
Acj=X
Kj[T–S]–X–SBiCcj
Bcj=X–Kj, Ccj=Kj[T–S]–X, ()
where the matrix Xderives from the factorization I–ST–=XYT< ,and then the
fuzzy discrete-time closed-loop system ()is exponentially mean-square stable and the controlled output zksatisfies().
Proof For the purpose of design desired controller parametersAcj,Bcj, andCcjfrom
The-orem , we partitionPandP–as
(∗) P=
S X
XT
X
, P–=
T– Y
YT
Y
,
where the partitioning ofPandP–are appropriately dimensioned to be determined by
¯
Aij,A¯i,Dij, andB¯jin ().
Define
W=
T– I YT
, W=
I S
XT
,
and then we havePW=WandWTPW=WTW. Now we define the controller param-eters from () as follows:
Kj= [SBiCcj+XAcj]YTT,
Kj=XBcj, ()
Kj=CcjYTT.
By applying the congruence transformation
diag{W,W , . . . , W +
,I,I,W,Ih,I+,I,I,I,W , . . . , W
h
,W,I,I+,I+}
to () and (), we can have
⎡ ⎢ ⎣
Λ Ωij
∗ Λ Ωii
∗ ∗ Λ
⎤ ⎥
⎦< , ()
Λ=diag{–P¯, –P¯ +, –I, –ϕI},
Λ=diag–P¯, –Qh, –R , –ϕI, –ψI, –γI
,
=diag–P¯h, –P¯, –Q¯–m, –R–, –ψI+
,
Ωij= ⎡ ⎢ ⎢ ⎢ ⎣
˜
Aij ¯⊗ ¯Ai ¯⊗ ¯B r¯W¯ ¯⊗ ˜B D¯ij
˜⊗ ¯B ˜⊗ ˜B
˜
Ei Dj
ϕ√λG˜
Ωii= ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
ZTT
– ZTT–⊗ ¯I
˜
⊗ ¯ATi
ψMT
rW˜
⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ,
¯
P=
T– I
∗ S
, P¯s=diag{¯P , . . . ,P¯ s
},
¯
Ei= [EiT– Ei], G¯= [GT– G], ¯Il= [I , . . . ,I
+ ],
˜
Aij=
(Aij+BiKj)T– Aij
(SAij+α¯KjM+Kj)T– SAij+α¯KjM
.
On the other hand, it follows from [T––H]TT[T––H]≥ that
–T–≤–H–HT+HTTH. ()
Furthermore, again applying the congruence transformation
diag{I,I+,I,I,T,Ih,I+,I,I,I,T , . . . ,T
h
,T,Q¯m,I+,R+}
to (), we have
⎡ ⎢ ⎣
Λ
Ωij
∗ Λ Ωii
∗ ∗ Λ
⎤ ⎥
⎦< , ()
whereT =diag{T,I}. By combination () and (), if () and () are satisfied, the in-equality () holds. Therefore the sufficient condition () and () of Theorem is effec-tive.
Next, let us calculate the desired controller parameters. We can obtain fromPP–=I
I–ST–=XY. ()
ByP> ,T> ,S> ,WT
PW=WTW= T– I
I S
, and if () and () are feasible, we can inferI–ST–=XY< . SoI–ST–is nonsingular. Hence one can always find square and nonsingularXandYsatisfying () []. In this case, we can obtainAcj,Bcj, and Ccjvia solving (). Now it can be concluded from Theorem that the fuzzy closed-loop
system () is exponentially mean-square stable and the controlled outputz(k) satisfies () with the controller parameters given by ().
in []. The results derived in this paper also contain the two theorems in [] as special cases. Moreover, randomly occurring nonlinearities have not been considered in [], and sector nonlinearities have not been studied in [].
Remark The design of controller directly affects the stability andH∞performance of the discrete-time closed-loop system. Compared with [, , ], it should be pointed out that the fuzzy controller designing arithmetic in Theorem has more generality than the usual controller, that is to say, the controller designing arithmetic in [, ] cannot be available for the design of fuzzyH∞ output-feedback controller for a class of discrete-time T-S fuzzy systems with channel fadings, sector nonlinearities, ROIDs, and RONs. To design the controller and complete the proof of Theorem ,PandP–are in the form of (∗), which can be found in [, ]. The conditions as regardsPin [] are more conservative than ours because one not only needsP> , but alsoS> andX> . Therefore, Theorem has less conservatism.
Remark In Theorem , the sufficient conditions involved in the randomly occurring nonlinearities, the probabilistic interval delays, sector nonlinearities, and channel fad-ings were first established for the desired fuzzy output-feedback controller. The fuzzy output-feedback controller is designed such that the discrete-time system () is expo-nentially mean-square stable and, under the zero-initial condition, the proposedH∞ per-formance index can be satisfied. Particularly, with the designed ofH∞fuzzy controllers, the robustness of our developed controller operation algorithms of the discrete-time fuzzy system includes the traditional controller algorithms. In other words, the tradi-tional controller algorithms means that we have the membership functionhi= ,hj=
(i=j,j= , . . .i– ,i+ , . . . ,r) in the discrete-time fuzzy system. Obviously, the devel-oped controller algorithms work better than the traditional algorithms in dealing with the occurrence probability of randomly occurring nonlinearities, interval delays, sector non-linearities, and channel fadings, which appropriately avoid the deterioration of the H∞ performance.
4 Numerical example
In this section, we present illustrative examples to show the effectiveness of the proposed controller design approach.
Consider the following discrete-time T-S fuzzy model from (): ⎧
⎪ ⎨ ⎪ ⎩
x(k+ ) =i=hi{Aix(k) +Ai
mβm(k)x(k–τm(k)) +Biu(k)
+Diω(k) +r(k)f(x(k))}, z(k) =i=hi{Eix(k) +Diω(k)}.
Consider the model parameters as follows:
A=
. –. . –.
, A=
. –. . –.
,
A=
. . –.
, A=
. . –.
,
D=D= [. .]T,
D=D= .,
E=E= [–. .],
with the initial valueφ(s) = [, ]T(s= , –, –, –, –, –). The nonlinear vector-valued
functionh(k) is as follows:
hx(k)=
.x (k) x(k)+ .x(k)sin(x(k))
.
Besides, it can easily be noticed that Assumption satisfiesλ= . and
G=
. .
,
the sensor nonlinearity is given as
gx(k)=M+M x(k) +
M–M sin
x(k),
where
M=
. .
, M=
. .
.
In the meantime, the output measurement is described as follows:
y(k) =g(x(k)),
ξ(k) =α(k)y(k) +
l=αl(k)y(k–l) +ν(k).
Here, the order of channel fading is = , the mathematical expectations of the channel coefficients areα¯= .,α¯= . andα¯= ., and the variances of the channel coefficients areα˜∗= .,α˜∗= ., andα˜∗= .. Assume thath= for the time-varying delays,τ(k) andτ(k) are, respectively, uniformly distributed in the intervals [, ] and [, ], and the stochastic variablesβ¯= .,β¯= .. Other stochastic variables arer¯= .,r˜= ..
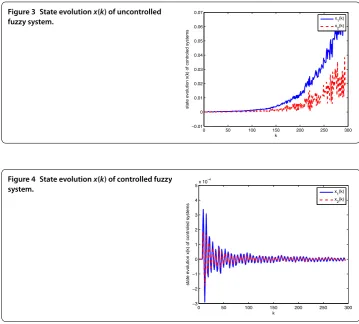
To further illustrate the effectiveness of the designedH∞fuzzy controller, the exogenous disturbance inputsν(k),ω(k) are assumed to be
ν(k) = .sin(k)
k , ω(k) =
.sin(k)
k .
Figure 1 Membership function.
Figure 2 The states of the system and the fuzzy controller.
Applying Theorem and the LMI toolbox, we can obtain the desired controller param-eter matrices in the form of () such that the fuzzy system () is exponentially mean-square stable with theH∞norm boundγ = . as follows:
Ac=
. . –. –.
, Ac=
. . –. –.
,
Bc=
–. –. . .
, Bc=
–. –. . .
,
Cc= [. –.], Cc= [. –.].
Figure 3 State evolutionx(k) of uncontrolled fuzzy system.
Figure 4 State evolutionx(k) of controlled fuzzy system.
5 Conclusions
In this paper, a fuzzyH∞output-feedback controller has been designed for a class of fuzzy discrete-time systems with sector nonlinearities, channel fadings, randomly occurring in-terval delays as well as randomly occurring nonlinearities. A sufficient condition for the
H∞ robust exponential stability of the fuzzy discrete-time system has been obtained by a Lyapunov stability analysis approach and stochastic analysis theory. Moreover, by using the LMI technique, a clear expression of the desiredH∞fuzzy output-feedback controller can be obtained and the proposedH∞-norm bound constraint has been guaranteed. At last, the developed fuzzy controller design approach has been checked by a numerical simulation example. Further research topics might include the development of our results to more complex and more varied cases with sector nonlinearities and channel fadings by using a stochastic analysis approach, such as multi-agent systems based on the T-S fuzzy model, descriptor systems, and affine fuzzy systems.
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed to the writing of this paper. All authors read and approved the final manuscript.
Author details
1School of Science, Jiangnan University, Wuxi, 214122, China.2School of Internet of Things, Jiangnan University, Wuxi,
214122, China.3Key Laboratory of Advanced Process Control for Light Industry, Ministry of Education, Institute of
Acknowledgements
The authors are grateful to the anonymous referees for their excellent suggestions, which greatly improved the presentation of the paper. This work is supported by the National Science Foundation of China (61572238), the Provincial Outstanding Youth Foundation of Jiangsu Province (BK20160001), the National High Technology Research and Development Program of China (National 863 Program) (No:2014AA041505) and the Nature Science Foundation of Jiangsu Province of China under Grant No. BK20161126.
Received: 2 May 2016 Accepted: 10 October 2016
References
1. Sugeno, M, Takagi, T: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern.1, 116-132 (1985)
2. Nguang, S, Shi, P:H∞fuzzy output feedback control design for nonlinear systems: an LMI approach. IEEE Trans. Fuzzy Syst.11, 331-340 (2003)
3. Assawinchaichote, W, Nguang, S: FuzzyH∞output feedback control design for singularly perturbed systems with pole placement constraints: an LMI approach. IEEE Trans. Fuzzy Syst.14, 361-371 (2006)
4. Lee, K, Kim, J, Jeung, E, Park, H: Output feedback robustH∞control of uncertain fuzzy dynamic systems with time-varying delay. IEEE Trans. Fuzzy Syst.8, 657-664 (2000)
5. Wu, Y, Su, H, Wu, Z:H∞filtering for discrete fuzzy stochastic systems with randomly occurred sensor nonlinearities. Signal Process.108, 288-296 (2015)
6. Yuan, K, Cao, J, Deng, J: Exponential stability and periodic solutions of fuzzy cellular neural networks with time-varying delays. Neurocomputing6, 1619-1627 (2006)
7. Dong, H, Wang, Z, Gao, H: Fuzzy control for systems with repeated scalar nonlinearities and random packet losses. IEEE Trans. Fuzzy Syst.17, 440-450 (2009)
8. Hou, Y, Liao, T, Yan, J: Stability analysis of Takagi-Sugeno fuzzy cellular neural networks with time-varying delays. IEEE Trans. Syst. Man Cybern., Part B, Cybern.37, 720-726 (2007)
9. Tipsuwan, Y, Chow, M: Control methodologies in networked control systems. Control Eng. Pract.11, 1099-1111 (2003)
10. Hespanha, J, Naghshtabrizi, P, Xu, Y: A survey of recent results in networked control systems. Proc. IEEE95, 138 (2007) 11. Walsh, G, Ye, H: Scheduling of networked control systems. IEEE Control Syst.21, 57-65 (2001)
12. Zhang, S, Wang, Z, Ding, D, Shu, H: Fuzzy filtering with randomly occurring parameter uncertainties, interval delays, and channel fadings. IEEE Trans. Cybern.44, 406-417 (2014)
13. Hu, M, Cao, J, Hu, A: Mean square exponential stability for discrete-time stochastic switched static neural networks with randomly occurring nonlinearities and stochastic delay. Neurocomputing129, 476-481 (2014)
14. Ozel, O, Tutuncuoglu, K, Yang, J, Ulukus, S, Yener, A: Transmission with energy harvesting nodes in fading wireless channels: optimal policies. IEEE J. Sel. Areas Commun.29, 1732-1743 (2011)
15. Mostofi, Y, Murray, R: To drop or not to drop: design principles for Kalman filtering over wireless fading channels. IEEE Trans. Autom. Control54, 376-381 (2009)
16. Boulkroune, A, M’Saad, M: A fuzzy adaptive variable-structure control scheme for uncertain chaotic MIMO systems with sector nonlinearities and dead-zones. Expert Syst. Appl.38, 1474-1475 (2011)
17. Hsu, K: Variable structure control design for uncertain dynamic systems with sector nonlinearities. Automatica34, 505-508 (1998)
18. Saat, S, Nguang, SK: NonlinearH∞output feedback control with integrator for polynomial discrete-time systems. Int. J. Robust Nonlinear Control25, 1051-1065 (2015)
19. Nguang, SK, Krug, M, Saat, S: Nonlinear static output feedback controller design for uncertain polynomial systems: an iterative sums of squares approach. In: 2011 6th IEEE Conference on Industrial Electronics and Applications (2011) 20. Xu, S, Chen, T:H∞output feedback control for uncertain stochastic systems with time-varying delays. Automatica40,
2091-2098 (2004)
21. Yang, F, Wang, Z, Hung, Y:H∞control for networked systems with random communication delays. IEEE Trans. Autom. Control51, 511-518 (2006)
22. Zhang, S, Wang, Z, Ding, D, Shu, H:H∞output-feedback control with randomly occurring distributed delays and nonlinearities subject to sensor saturations and channel fadings. J. Franklin Inst.351, 4124-4141 (2014) 23. Zhang, S, Wang, Z, Ding, D, Shu, H: Fuzzy control with randomly occurring infinite distributed delays and channel
fadings. IEEE Trans. Fuzzy Syst.22, 189-200 (2014)
24. Dong, H, Wang, Z, Ho, D, Gao, H: Robust fuzzy output-feedback control with multiple probabilistic delays and multiple missing measurements. IEEE Trans. Fuzzy Syst.18, 712-725 (2010)
25. Zhang, S, Wang, Z, Ding, D, Shu, H:H∞output-feedback control with sector nonlinearities and channel fadings. In: 2014 33rd Chinese Control Conference (CCC). IEEE, New York (2014)
26. Wu, Z, Shi, P, Su, H, Chu, J: Asynchronousl2–l∞filtering for discrete-time stochastic Markov jump systems with randomly occurred sensor nonlinearities. Automatica50, 180-186 (2014)
27. Xu, Y, Su, H, Pan, Y, Wu, Z: RobustH∞filtering for networked stochastic systems with randomly occurring sensor nonlinearities and packet dropouts. Signal Process.93, 1794-1803 (2013)
28. Zuo, Z, Wang, J, Huang, L: Output feedbackH∞controller design for linear discrete-time systems with sensor nonlinearities. IEE Proc., Control Theory Appl.152, 19-26 (2005)
29. Xu, S, Lam, J, Mao, X: Delay-dependentH∞control and filtering for uncertain Markovian jump systems with time-varying delays. IEEE Trans. Circuits Syst. I54, 2070-2077 (2007)
30. Xu, S, Lam, J, Zou, Y: New results on delay-dependent robustH∞control for systems with time-varying delays. Automatica42, 343-348 (2006)
31. Elia, N: Remote stabilization over fading channels. Syst. Control Lett.54, 237-249 (2005)
32. Lam, J, Gao, H, Xu, S, Wang, C:H∞andL2/L∞model reduction for system input with sector nonlinearities. J. Optim.
Theory Appl.125, 137-155 (2005)
34. Cottle, R: Manifestations of the Schur complement. Linear Algebra Appl.8, 189-211 (1974)
35. Guan, X, Chen, C: Delay-dependent guaranteed cost control for T-S fuzzy systems with time delays. IEEE Trans. Fuzzy Syst.12, 236-249 (2004)
36. Chen, J, Chen, X: Special Matrices. Tsinghua University Press, Beijing (2001)
37. Scherer, C, Gahinet, P, Chilali, M: Multiobjective output-feedback control via LMI optimization. IEEE Trans. Autom. Control42, 896-911 (1997)