ELECTRICAL ENGINEERING
Regression model for tuning the PID
controller with fractional order time delay system
S.P. Agnihotri
*, Laxman Madhavrao Waghmare
SGGS Institute of Engineering and Technology, Vishnupuri, Nanded, India Received 5 September 2013; revised 7 April 2014; accepted 16 April 2014 Available online 13 June 2014
KEYWORDS
Regression model; PID controller; Iterative algorithm; Fractional order; Time delay and system
Abstract In this paper a regression model based for tuning proportional integral derivative (PID) controller with fractional order time delay system is proposed. The novelty of this paper is that tun-ing parameters of the fractional order time delay system are optimally predicted ustun-ing the regression model. In the proposed method, the output parameters of the fractional order system are used to derive the regression function. Here, the regression model depends on the weights of the exponential function. By using the iterative algorithm, the best weight of the regression model is evaluated. Using the regression technique, fractional order time delay systems are tuned and the stability parameters of the system are maintained. The effectiveness and feasibility of the proposed technique is demonstrated through the MATLAB/Simulink platform, as well as testing and comparison using the classical PID controller, Ziegler–Nichols tuning method, Wang tuning method and curve fitting technique base tuning method.
Ó2014 Production and hosting by Elsevier B.V. on behalf of Ain Shams University.
1. Introduction
In different regions, Time-Delay Systems (TDS) encounter along with engineering, the field of biology, and also econom-ics[1,2]. A time delay is usually a footing regarding unsteadi-ness and also fluctuations within a process[3]. Two sorts of time delay devices are there as follows: retarded and also fairly neutral [4]. Throughout TDS, wherever time-delays existing between the features regarding input on the process and also the ensuing result, could be suggested simply by delay
differential equations (DDEs)[5]. Programs along with delays reveal any category in inexhaustible dimensions mostly requested the actual modeling as well as the research regarding transportation and also propagation phenomena [6]. Time-delays on top of things loops normally mortify process display and confuse case study and also strategy regarding feedback controllers[7].
The actual solidity of time-delay methods is often a prob-lem of chronic interest due to a number of functions of com-munication systems in the field of biology in addition to population dynamics [8]. Generally, solidity review of time-delay methods could be classified straight into two varieties. First is the particular delay-dependent stability review which often contains the data in the length of the particular delay, and one much more is the delay-independent stability review [9,10]. The actual delay independent stabilization comes with a controller which will temporarily relieve the system in spite of the length of the particular delay[11]. However, the delay
* Corresponding author. Tel.: +91 7588306244.
E-mail address:[email protected](S.P. Agnihotri). Peer review under responsibility of Ain Shams University.
Production and hosting by Elsevier
Ain Shams University
Ain Shams Engineering Journal
www.elsevier.com/locate/asej
www.sciencedirect.com
2090-4479Ó2014 Production and hosting by Elsevier B.V. on behalf of Ain Shams University.
centered stabilizing controller can be worried using the size of the delay in addition to routinely provide the upper bound of the delay[12].
Dead time is probably the motivated presentation in addi-tion to firmness involving time-delay devices[13]. Time delay continually subsists inside the measurement loop or control loop, and therefore it is much more challenging to overpower this sort of method[14]. In order to enhance the control pre-sentation, a few novel control techniques, like predictive con-trol and the neural type of an artificial neutral delay in a control loop were used[4]. The PID controller is used in an extensive number of difficulties like automotive, instrumenta-tion, motor drives and so forth.[15]. This specific controller gifts feedback, the idea will be able to take out steady-state offsets by means of hooked up actions, and also it can certainly wait for the extracted actions[16]. Due to the simplicity of the structure and potential to solve many control problems of the system[17]. PID controller offers sturdy and trustworthy demonstration pertaining to most of the devices in the event the PID boundaries tend to be adjusted surely [15]. Many delay-independent sufficient conditions for the asymptotic steadiness involving basic delay differential devices are used [18].
As, this long-established PID compensator seemed to be requested this monitoring and stabilization of the loops design technique[19], considering that the conventional PID controllers are not appropriate for nonlinear programs and higher-ordered and time-delayed programs [20]. Below, this stabilizing PID controller may reduce the working out occa-sion also it keeps away from this time-consuming stableness examination [21] plus the reports of the PID controllers awfully be determined by the complete understanding of the system time delay[6].
Within this report, the regression model based proposed for tuning proportional integral derivative (PID) controller along with fractional order time delay system will be recommended. This novelty in this report will be which tuning parameters with the fractional order time period delay process will be opti-mally expected when using the regression model. Within the recommended method, this output parameter of the fractional order system is utilized to help derive this regression model sit-uation. In this paper, this regression model depends on the loads with the exponential function. With the iterative criteria, the most beneficial weight to the regression model is decided. With all the regression process, fractional order time delay system will be tuned plus the stability parameters with the pro-cess will be managed. This detailed justification with the rec-ommended hybrid process will be illustrated inside area 3. Previous those, the recent research works are described in Section 2. The outcomes in addition to discussion referred in Sections4 and 5end this report.
2. Recent research works: a brief review
Several associated works are previously accessible to the liter-ature which based on PID controller design for time delay fractional order system. A few of them are assessed here. A technique to compute the entire set of stabilizing PID control-ler parameters for a random (including unstable) linear time delay system has been offered by Hohenbichler[22]. To handle the countless number of stability boundaries in the plane for a
permanent proportional gain kp was the most important con-tribution. It was illustrated that the steady area of the plane contains convex polygons for retarded open loops. A phenom-enon was initiated concerning neutral loops. For definite sys-tems and certain kp, the precise, steady area in the plane could be explained by the limit of a sequence of polygons with an endless number of vertices. This cycle might be fined fairly accurate by convex polygons. Moreover, they explained a needed condition for kp-intervals potentially containing a sta-ble area in the plane. As a result, after gridding kp in these intervals, the set of stabilizing controller parameters could be planned.
A partial order PIkDlcontroller of robust constancy areas for interval plant with time delay has been suggested by Liang et al.[23]. They have explored the problem of computing the robust constancy area for interval plant with time delay. The partial order interval quasi-polynomial was crumbling into a number of vertex attribute quasi-polynomials by the lower and upper bounds. To explain the constancy boundaries of every vertex attributes quasi-polynomial in the space of controller parameters, the D-decomposition method was employed. By overlapping the constancy area of each polynomial, the constancy area of interval attribute quasi-polynomial was found out. By choosing the control parame-ters from the constancy area, the parameparame-ters of their suggested controller were attained. The vigorous constancy was checked by means of the value set together with the zero elimination principle. Their suggested algorithm was constructive in exam-ining and planning the robust PIkDl controller for interval plant.
A particle swarm optimized I-PD controller of Second Order Time Delayed System has been suggested by Suji Prasad et al.[24]. Optimization was based on the presentation indices like settling time, rise time, peak overshoot, ISE (integral square error) and IAE (integral absolute error). PID control-lers and its alternatives are most commonly used, although there are important improvements in the control systems in industrial processes. If the parameter of controller was not appropriately planned, next needed control output may not succeed. Compared with Ziegler Nichols and Arvanitis tuning, they have confirmed that their simulation results with opti-mized I-PD controller to be specified enhanced presentations. A PID controller for time delay systems has been explained by Rama Reddy et al.[25]. Their suggested technique pre´cised the stable areas of PID and a novel PID with cycle leading cor-rection (SLC) for network control systems with time delay. The latest PID controller has a modification parameter ‘b’. They have obtained that relation of the parameters of the sys-tem. The outcome of plant parameters on constancy areas of PID controllers and SLC-PID controllers in first-order and second-order systems with time delay is moreover pre´cised. Finally, an open-loop zero was introduced into the plant-unstable second order system with time delay so that the con-stancy areas of PID and SLC-PID controllers get competently made bigger.
Luo et al.[26]have suggested a part encloses in selecting two feasible or achievable patterns, and a FOPI/IOPID controller synthesis was applied for all the steady FOPTD systems. The entire possible area of two patterns can be attained and pictured in the plane by means of their suggested plan. Every mixture of two patterns can be confirmed before the controller design, with those areas as the previous knowledge.
In particular, it was fascinating to compare the regions of these two possible areas for the IOPID and FOPI controllers. A sim-ulation picture demonstrates that their suggested plan has resulted and their presentation of the designed FOPI controller is compared to the optimized integer order PI controller and the planned IOPID controller.
Bouallegue et al.[27]have suggested to a novel PID-type fuzzy logic controller (FLC) tuning approaches from a particle swarm optimization (PSO) strategy. Two self-tuning methods were inserted so as to develop more the presentation and toughness properties of the suggested PID-fuzzy strategy. The scaling features tuning problem of these PID-type FLC configurations was created and steadily determined, by means of a suggested limited PSO algorithm. To show the competence and the supremacy of the suggested PSO-based fuzzy control strategies, the case of an electrical DC drive benchmark was explored, inside an improved real-time framework.
Shabib et al. [28]have explained about the power system nonlinear with frequent changes in operating areas. In excita-tion control of power systems, Analog proporexcita-tional integral copied PID controllers were extensively employed. Fuzzy logic control was frequently out looked as a structure of nonlinear PD, PI or PID control. They moreover explained the design principle, tracking presentation of a fuzzy proportional-integral PI plus derivative D controller. To integrate a fuzzy logic control mechanism into the alterations of the PID struc-ture, this controller was improved by first explaining discrete time linear PID control law and subsequently more and more obtaining the steps required. The bilinear transform (Tustin’s) was applied to discretize the conventional PID controller. In that some presentations criteria were employed for comparison between other PID controllers, such as settling times, over-shoots and the amount of positive damping.
Ozbay et al. [29]possess created some sort of traditional appropriate PID controllers with regard to linear time period invariant facilities whoever transfer operates were logical oper-ates connected withSa, exactly where 0 <a< 1, andsis the Laplace transform variable. Effect connected with input– output time period delay about the range of allowed controller details has been perused. This allowed PID controller details were identified from a small acquire style of argument utilized sooner with regard to specific dimensional facilities.
Zhao et al.[30]proposed an Integral of Time Absolute Error (ITAE) zero-position-error optimal tuning and noise effect minimizing method for tuning two parameters in MD TDOF PID control system to own sought after regulatory as well as disturbance rejection overall performance. Your contrast together with Two-Degree-of-Freedom control program by modified smith predictor (TDOF CS MSP) and also the made MD TDOF PID tuned by the IMC tuning approach demon-strates the potency of the particular described tuning approach. Feliu-Batlle et al.[31]proposed the latest technique for the control of water distribution in an irrigation main canal pool seen as substantial time-varying time delays. Time delays may perhaps adjust greatly in an irrigation main canal pool as a result of versions inside its hydraulic operations program. A classic system got its start to development fractional buy PI controllers coupled with Smith predictors that produce control systems which can be robust for the modifications in the pro-cess time delay. The system was given to fix the situation regarding powerful water submission control in an irrigation main canal pool.
Sahu et al.[32]have outlined around the design and style as well as effectiveness evaluation regarding Differential Evolution (DE) algorithm based parallel 2-Degree Freedom of Proportional-Integral-Derivative (2-DOF PID) controller for Load Frequency Control (LFC) of interconnected power system process. The planning issue has been formulated as an optimization issue and DE has been currently employed to look for optimal controller parameters. Standard as well as improved aim features have been used for the planning goal. Standard aim features currently employed, which were Integral of Time multiplied by Squared Error (ITSE) and Integral of Squared Error (ISE). To be able to additionally raise the effec-tiveness in the controller, some sort of improved aim operate is derived making use of Integral Time multiply Absolute Error (ITAE), damping ratio of dominant eigenvalues, settling times of frequency and peak overshoots with appropriate weight coefficients. The particular fineness in the recommended tech-nique has become confirmed by simply contrasting the results with a lately published strategy, i.e. Craziness based Particle Swarm Optimization (CPSO) for the similar interconnected electric power process. Further, level of sensitivity evaluation has been executed by simply varying the machine details as well as managing load conditions off their nominal valuations. It is really observed which the recommended controllers are quite powerful for many the system parameters as well as man-aging load conditions off their nominal valuations.
Debbarma et al.[33]have suggested a new two-Degree-of-Freedom-Fractional Order PID (2-DOF-FOPID) controller ended up being suggested intended for automatic generation control (AGC) involving power systems. The controller ended up being screened intended for the first time using three unequal area thermal systems considering reheat turbines and appropriate generation rate constraints (GRCs). The simultaneous optimization of several parameters as well as speed regulation parameter (R) in the governors ended up being accomplished by the way of recently produced metaheu-ristic nature-inspired criteria known as Firefly Algorithm (FA). Study plainly reveals your fineness in the 2-DOF-FOPID controller regarding negotiating moment as well as lowered oscillations. Found function furthermore explores the effectiveness of your Firefly criteria primarily based mar-keting technique in locating the perfect guidelines in the con-troller as well as selection of R parameter. Moreover, the convergence attributes in the FA are generally justify when compared with its efficiency along with other more developed marketing technique such as PSO, BFO and ABC. Sensitivity analysis realizes your robustness in the 2-DOF-FOPID con-troller intended for distinct loading conditions as well as large improvements in inertia constant (H) parameter. Additionally, the functionality involving suggested controller will be screened next to better quantity perturbation as well as ran-domly load pattern.
Better performances of the closed-loop can be achieved by using such kinds of controllers in fractional order time delay systems. The PID controller is used due to the simplicity of the operation, design and low cost in many industrial applica-tions. However, for making stability system the tuning process of PID controller is one of the complexes. Many tuning meth-ods PID gains have been developed, but the Ziegler Nichols method is one of the classical PID gain tuning technique. But, the Ziegler–Nichols method is still widely used for determining the parameters of PID controllers. In addition,
construction of a mathematical tuning model design becomes sometimes costly and these tuning rules often do not give suit-able values because of modeling errors. The linear program-ming method is efficiently for tuning the PID gains. But, it is an iterative feedback tuning; so, the computational time and the difficulty of the tuning are high. Thus, the linear program-ming method is suitable for the specific case of tuning that is a linear objective function. In this paper, iterative algorithm and curve fitting technique proposed to tune the fractional order time delay system with PID controller.
3. Fractional order PID controller
Fractional-order controller design has attracted considerable attention in the recent years due to a number of applications. Better performances of the closed-loop can be achieved by using such kind of controllers. In many industrial applications, the PID controller is used due to the simplicity of the opera-tion, design and low cost. The PID controllers are described by a fractional order mathematical model. The fractional order system is designed on control theory based techniques. So the closed loop control parameters are changed sensitively and their performance is enhanced. The fractional order PID con-troller block diagram structure is given in the followingFig. 1. The above figure describes the combination of the PID con-trollerGC(s) and fractional order systemGC(s) ande
hs . The inputs, error and output of the present closed loop control sys-tem arer EandYrespectively. Here, the output of the frac-tional order PID controller can be described in the following Eq.(1). YðsÞ ¼EðsÞ K ehs KpsþKiþKds 2 ðTs2þsÞ ð1Þ
whereY(s) is the output equation,E(s) is the error of the system, Tis the time constant,his the time delay andKis represented as the steady state gain of the system, Kp, Ki and Kd are the proportional, integral and derivative gains respectively. The better tuning parameters are achieved by the proposed tech-nique, which is briefly explained in the following Section 3.1. 3.1. Over view of the proposed method
In this paper, a regression analysis for tuning the PID control-ler with fractional order time delay system is proposed. The regression analysis tuning is one of the statistical models, which are used to describe the relationship between two and more variables. It identifies the best fit parameters from the available system dataset. Here, the tuning process of the proposed model depends on the weight of the exponential function. From the iterative algorithm best weights are deter-mined. It has been allowed to evaluate the best fit parameters
of the system and it makes the exact system response. By using the evaluated parameters the fractional order system steady state response is maintained and the best PID controller gains were achieved at the time of system parameter variations. 3.1.1. Regression model
The proposed regression model is the widely used prediction and forecasting technique, which is used to discover the best fit parameters from the available system data points. Here, it forms the regression equation with the use of system output parameters. In the regression equation the best values are determined with the required adjustments of the system parameters. The general equation can be described [5,8] in the following,
znðxÞn¼z0þz1x1þz2x2þz3x3þ þzn1xn1þznxn ð2Þ
where zn(x)n is the required system data, z0, z1, z2. . .zn1
andznare the system data points at various conditions. The system data are depending on the response of Y(s), which are varied from different conditions, i.e., 0ton values. In regression analysis the system response at n value can be described as the following,
In regression analysis condition,xn¼ 1
YðsÞ,zn¼
1 1þexpwn Then the regression valuezn(xn) is rewritten as follows, znðxÞ n ¼ 1 1þexpwn EðsÞ K ehs KpsþKiþKds2 ðTs2þsÞ n ð3Þ
wherewnis the weight of the exponential function, the equa-tion shows the system data atzn(x
n
) value. By using the Eq. (3), the following equations are derived from different condi-tions. Then the following equation can be described at the ini-tial data points and weight. If,xn=x0andz
n=z0, then the
Eq.(3)is written as follows: znðxnÞ=n¼0¼z
0 ð4Þ
If,xn=x1andzn=z1then Eq.(3)is written as follows:
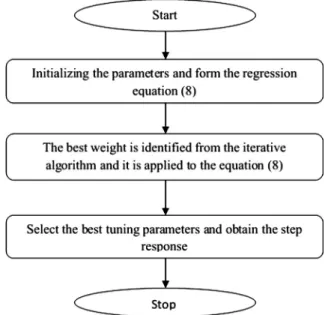
Figure 2 Structure of the proposed method. Figure 1 Structure of the fractional order PID controller.
Figure 3 Performance of the system (a) PID controller (b) Ziegler–Nicholas method (c) curve fitting technique (d) Wang tuning controller (e) regression method.
znðxnÞ=n¼1 ¼ 1 1þexpw1 EðsÞ K ehs KpsþKiþKds2 ðTs2þsÞ 1 ð5Þ
If,xn=xn-1andzn=zn1then Eq.(3)is written as follows:
ZnðxnÞ=n¼n1 ¼ 1 1þexpwn1 EðsÞ K ehs KpsþKiþKds 2 ðTs2þsÞ n1 ð6Þ
If,xn=xnandzn=znthen Eq.(3)is written as follows: znðxnÞ=n¼n ¼ 1 1þexpwn EðsÞ K ehs KpsþKiþKds2 ðTs2þsÞ n ð7Þ
The above mentioned equations at different conditions (4) to (7) are substituted in Eq.(2)and the regression based system
equation is derived. Finally, the data points are combined with the standard fractional order system which is derived in terms of a regression equation, which is in the form of each data point and the derived system equation is described as follows: znðxnÞ ¼z0þ 1 1þexpw1 EðsÞ Kehs Kp sþKiþKds2 ðTs2þsÞ 1þ þ 1 1þexpwn1 EðsÞ Kehs Kp sþKiþKds 2 ðTs2þsÞ n1 þ 1 1þexpwn EðsÞ Kehs Kp sþKiþKds2 ðTs2þsÞ n ð8Þ
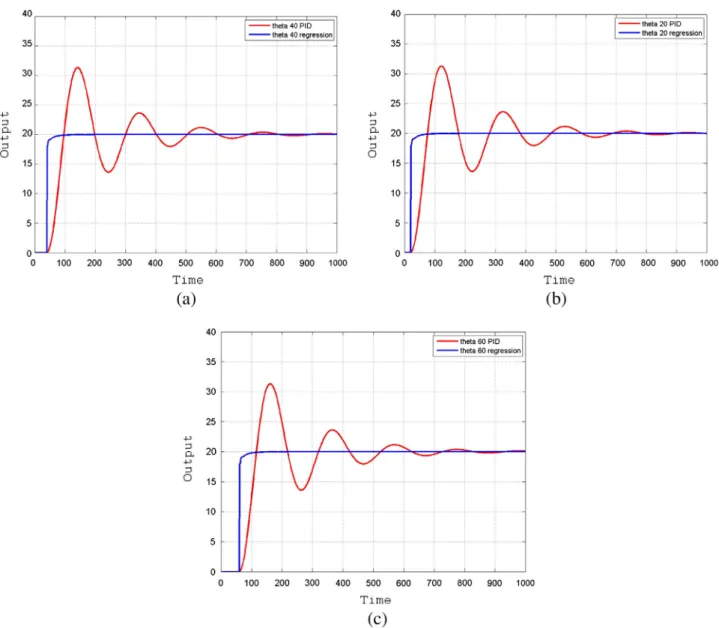
The best fit data point of the system depends on the weight of the exponential function. The iterative algorithm is used to determine the best weights; it means the certain weight con-tains reduced overshoot time, settling time and steady state error. The identification of the best weight using the iterative algorithm is briefly explained in the following section. Figure 4 (a–c) Comparison of the tuning performance of the system at different time delay instants.
3.1.2. Best weight determined by iterative algorithm
An iterative algorithm is the act to determine the desired goal, target or result. In the process a mathematical function is applied repeatedly, and the output of the one iteration is used as the input of the next iteration. It can produce the approxi-mate numerical solutions depending on the mathematical eval-uation. Here, the best weight is determined from certain evaluations. During the iteration process, the selected weight checks for the convergence condition, i.e., the overshoot time, the settling time and the steady state error is reduced. If the resultant weight satisfies the convergence condition, then it means that the steady state response of the system has been maintained.
wn¼ xnl
1
l2 ð9Þ
wherexnis the data points of the fractional order system,l1
and l2 are the scaling transformation l1=mean(x
n ) and
l2=std(xn).
Steps to determine the best weight
Step 1: Initialize the system data points from xn
minx nxn
max:
Step 2: To determine the weight using the Eq.(9)and the system data points.
Step 3: The determined weights are applied into the Eq. (8)and check the output.
Step 4: If the convergence is satisfied, i.e., the overshoot time, the settling time and the steady state error is reduced. Then the selected weight is the best weight (wBF
n ) or else go to the next step 5.
Step 5: To adjust the weights as wn± 1, which is achieved by changing the data points. Then repeat the process until the best weight is achieved (wBF
n ).
The final output of the iterative algorithm is the best weight, which is used to develop the optimal system response. The sequences of best weights are applied in the Eq.(1)and it can be described in the following Eq.(10).
zBF n ðxÞ n¼ zBF 0 þz BF 1 1 YðsÞ 1 þzBF 2 1 YðsÞ 2 þzBF 3 1 YðsÞ 3 þ þzBF n1 1 YðsÞ n1 þzBFn 1 YðsÞ n ð10Þ
The above equation is the resultant regression equation. The proposed method operational structure is described in the fol-lowingFig. 2. The proposed regression model is implemented in the MATLAB platform and the effectiveness is analyzed by comparing the classical PID controller, Ziegler–Nichols tuning method and iterative algorithm and curve fitting technique base tuning method.
4. Results and discussion
The proposed regression model is implemented on the MAT-LAB 7.10.0 (R2010a) platform. The numerical results of the
proposed method are presented and discussed in this section. In the implementation process, the system parameters values are set manually, i.e., the proportional gain (Kp), integral gain (Ki) and derivative gain (Kd) are 0.5, 0.05 and 3 respectively, time constant (T) is 360 s, time delay (h) is 1 s, steady state gain is (Tf) 14.9, the reference step is 10 and the simulated time is 1000 s. The effectiveness of the proposed method is tested and com-pared using the classical PID controller, Ziegler–Nichols tuning method and curve fitting technique based tuning method. The fractional order system with various time delays (h= 20, 40, 60, 80 and 100) at PID controller, Ziegler–Nichols tuning method, curve fitting technique, Wang tuning controller and regression method are analyzed in the following Fig. 3a–e respectively.
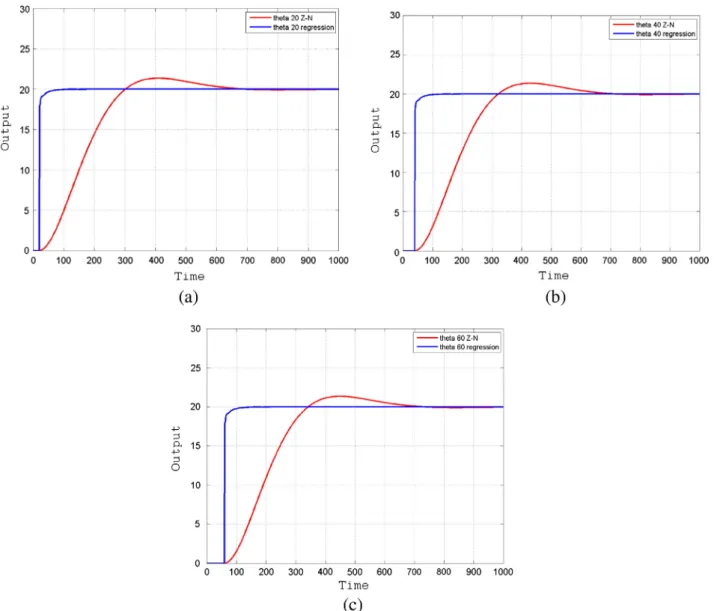
Then the fractional order time delay system of tuning per-formance of the proposed regression method is compared with the conventional PID controller, which is illustrated in the Fig. 4a–c. It is demonstrated under various time delays such as h= 20, 40 and 60. InFig. 5a–c the regression method is compared to the Ziegler–Nicholas method at time delays Figure 6 (a–c) Comparison of the tuning performance of the system at different time delay instants.
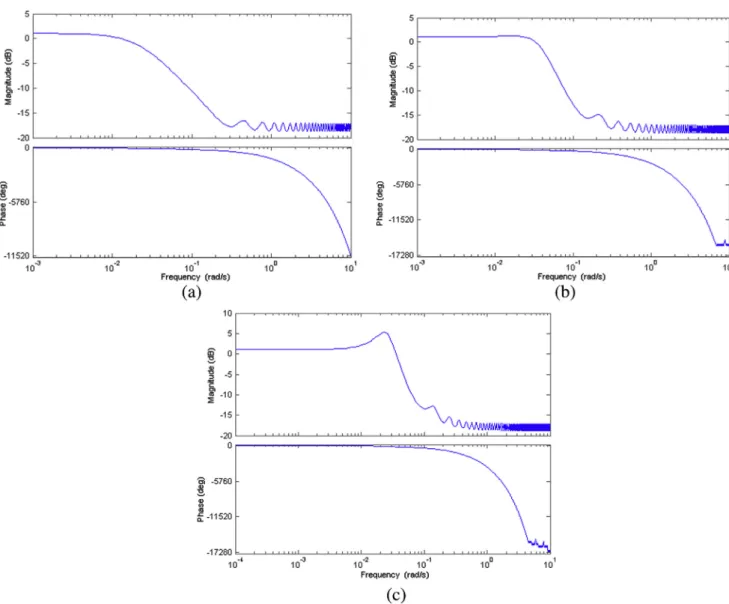
h= 20, 40 and 60 respectively. The Wang tuning controller is compared with the proposed method and it is explained in the Fig. 6a–c respectively. The tuning performance of our method effectiveness is compared to the curve fitting technique at time delay instants h= 20, 40 and 60, which is illustrated in the Fig. 7a–c respectively. The bode diagram of the system is eval-uated and subsequently setting the described time delay values. The bode diagram of the system after setting time delay instant
h= 20 is illustrated in the Fig. 8a. Fig. 8b shows that bode diagram of the system after setting the time delay instant
h= 40 and bode diagram after setting the time delay instant
h= 60, which is illustrated in theFig. 8c.
The proposed regression method’s effectiveness was dis-cussed in this section. Here, the fractional order time delay system is tested under the conventional PID controller, Ziegler–Nichols method, curve fitting technique, Wang tuning controller and our proposed method. These techniques are analyzed with various time delay instants h= 20, 40, 60, 80 and 100. During the time delay occurrence in the fractional
order time delay system, the output performance was oscil-lated. Therefore the rise time, overshoot time and settling time have been increased. Then the output performance of the every technique is compared to the proposed technique. By using the PID controller at different time delay instantsh= 20, 40 and 60. It takes more time to reach a low value to the highest value (rise time), the required output signal exceeds its target (overshoot time) and the settling time is also underprivileged. For Ziegler–Nichols method, reaching the high value at the 300 s at the time delay instant h= 20. The rise time gets increased from 320 s and 340 s, due to the time delay becomes increased at 40 and 60 respectively. The output of the Ziegler– Nichols method exceeds its target at increased time. Also the output requires more time to achieve the steady state or set-tling time, i.e., takes more than 700 s at various time delay instants h= 20, 40 and 60. Similar to the Ziegler–Nichols method the Wang tuning controller is also inefficient to pro-duce better tuning performance. The curve fitting technique also shows the following unfeasible solutions at various time Figure 7 (a–c) Comparison of the tuning performance of the system at different time delay instants.
delay instantsh= 20, 40 and 60. During the time delay occur-rence, the rise time is increased more than 80 s, a peak over-shoot time somewhat is reduced and the settling time becomes above 100 s. The proposed regression method achieves the rise time at less than 30 s, peak overshoot time gets reduced and the settling time has been less than 80 s. The comparative analysis shows that, the proposed technique gets better for tuning the system response when compared to curve fitting technique, Wang tuning controller, Ziegler– Nichols method and PID controller.
5. Conclusion
The proposed regression technique is used for tuning the frac-tional order time delay system with PID controller. In the regression technique, fractional order system output parame-ters were utilized to derive the time delay system response in the form of the regression function. Then, the best weights were selected by an iterative algorithm for fitting the best sys-tem response. The best weight was applied to the regression equation and the corresponding time delay system response
was analyzed. The results have been verified through various time delay responses and analyzed the stability of the PID controller with fractional order time delay system. The effec-tiveness of the proposed method is analyzed via the compari-son with the classical PID controller, Ziegler–Nichols tuning method and iterative algorithm and curve fitting technique base tuning method. The comparative analysis shows that, the proposed hybrid technique is the best technique for tuning the fractional order time delay system, which is competent over the other tuning methods. In future, the proposed method can be used in the higher order system tuning parameter optimiza-tion. Also the PID controller with fractional order time delay system tuning parameters will be predicted by using different types of optimization techniques.
References
[1] Sun Yi, Patrick W. Nelson, GalipUlsoy A. PI control of first order time-delay systems via eigen value assignment. In: American control conference on O’Farrell Street, San Francisco, CA, USA, June 29–July 01, 2011.
[2]Myeongjin Park, Ohmin Kwon, Juhyun Park, Sangmoon Lee. Delay-dependent stability criteria for linear time-delay system of neutral type. J World Acad Sci Eng Technol 2010;46.
[3]Hamed Basil, Issa Walid. A modified internal model control for unstable – time delayed system. Int J Eng Adv Technol 2011;1(1). [4] Myungsoo Jun, Michael G.Safonov. Stability analysis of a system with time delayed states. In: Proceedings of American control conference, 2000.
[5] Yong-Yan Cao, Zongli Lin, Tingshu Hu. Stability analysis of linear time-delay systems subject to input saturation. In: IEEE transactions on circuits and systems––I: fundamental theory and applications, vol. 49, No. 2, February 2002.
[6]Zhang Jianrong, Knopse Carl R, Tsiotras Panagiotis. Stability of time-delay systems: equivalence between Lyapunov and scaled small-gain conditions. IEEE Trans Autom Contr 2001;46(3). [7]Shekher Vineet, Rai Pankaj, Prakash Om. Comparison between
classic PID, integer order PID and fuzzy logic controller for ceramic infrared heater: analysis using MATLAB/Simulink. Int J Eng Adv Technol 2012;1(3).
[8]Farkh R, Laabidi K, Ksouri M. PI control for second order delay system with tuning parameter optimization. Int J Electr Electron Eng 2009;1(3).
[9] Antonis Papachristodoulou, Matthew M. Peet, Silviu-Iulian Niculescu. Stability analysis of linear systems with time-varying delays: delay uncertainty and quenching. In Proceedings of the 46th IEEE conference on decision and control, New Orleans, LA, USA, Dec. 12–14, 2007.
[10]Liu Xin-Ge, Min Wu, Martin Ralph, Tang Mei-Lan. Delay-dependent stability analysis for uncertain neutral systems with time-varying delays. J Math Comput Simul 2007;75:15–27. [11]Sreten B, Stojanovic, Dragutin LJ, Debeljkovic, Mladenovic Ilija.
A Lyapunov–Krasovskii methodology for asymptotic stability of discrete time delay systems. Serbian J Electr Eng 2007;4(2):109–17.
[12]He Yong, Min Wu, She Jin-Hua, Liu Guoping. Delay-dependent robust stability criteria for uncertain neutral systems with mixed delays. J Syst Contr Lett 2004;51(1):57–65.
[13]He Yong, Min Wu, She Jin-Hua, Liu Guo-Ping. Parameter-dependent lyapunov functional for stability of time-delay systems with polytopic-type uncertainties. IEEE Trans Autom Contr 2004;49(5):828–32.
[14]Tsang Kai-Ming, Rad Ahmad B, Chan Wai-Lok. Iterative feedback tuning for positive feedback time delay controller. Int J Contr Autom Syst 2005;3(4):640–5.
[15] Po-Kuang Chang, Jium-Ming Lin, Kun-Tai Cho. Ziegler-Nichols-based intelligent fuzzy PID controller design for antenna tracking system. In: Proceedings of the international multiconference of engineers and computer scientists, Hong Kong, vol. 2, 2011. [16]Cheng Yi-Cheng, Hwang Chyi. Stabilization of unstable
first-order time-delay systems using fractional-first-order Pd controllers. J Chin Inst Eng 2006;29(2):241–9.
[17]Young Soo Moon, Poo Gyeon Park, Wook Hyun Kwon. Robust stabilization of uncertain linear systems with time-delay. Inst Contr Autom Syst Eng 1999;1(2).
[18]Gopala Rao KA, Amarendra Reddy B, Durga Bhavani P. Fuzzy PI and integrating type fuzzy PID controllers of linear nonlinear and time-delay systems. Int J Comput Appl 2010;1(6).
[19]Shin Gang-Wook, Song Young-Joo, Lee Tae-Bong, Choi Hong-Kyoo. Genetic algorithm for identification of time delay systems from step responses. Int J Contr Autom Syst 2007;5(1):79–85. [20]Hamideh Hamidian, Ali Akbar Jalali. Calculation of PID
controller parameters for unstable first order time delay systems. Int J Sci Eng Res 2011;2(3).
[21]Takaaki Hagiwara, Kou Yamada, Iwanori Murakami Yoshinori Ando, Tatsuya Sakanushi. A design method for robust stabilizing modified PID controllers for time-delay plants with uncertainty. Int J Innov Comput Inform Contr 2009;5(10):3553–63.
[22] Norbert Hohenbichler. All stabilizing PID controllers for time delay systems 2009; 45(11): 2678–84.
[23]Liang Taonian, Chen Jianjun, Lei Chuang. Algorithm of robust stability region for interval plant with time delay using fractional order PIkDlcontroller. J Commun Nonlinear Sci Numer Simul 2012;17(2):979–91.
[24]Suji Prasad SJ, Varghese Susan, Balakrishnan PA. Particle swarm optimized i-pd controller for second order time delayed system. Int J Soft Comput Eng 2012;1(2):2231–307.
[25]Rama Reddy D, Sailaja M. Stability region analysis of PID and series leading correction PID controllers for the time delay systems. Int J Eng Sci Technol 2012;4(07).
[26]Luo Ying, Chen Yang Quan. Stabilizing and robust fractional order PI controller synthesis for first order plus time delay systems. J Automatica 2012;48(9):2159–67.
[27] Bouallegue S, Haggege J, Ayadi M, Benrejeb M. ID-type fuzzy logic controller tuning based on particle swarm optimization 2012; 25 (3): 484–93.
[28]Shabib G. Implementation of a discrete fuzzy PID excitation controller for power system damping. Ain Shams Eng J 2012;3(2):123–31.
[29]Ozbay Hitay, Bonnet Catherine, Fioravanti Andre Ricardo. PID controller design for fractional-order systems with time delays. Syst Contr Lett 2012;61(1):18–23.
[30]Zhao YM, Xie WF, Tu XW. Performance-based parameter tuning method of model-driven PID control systems. ISA Trans 2012;51(3):393–9.
[31]Feliu-Batlle V, Rivas-Perez R, Castillo-Garcia FJ. Fractional order controller robust to time delay variations for water distribution in an irrigation main canal pool. Comput Electron Agric 2009;69(2):185–97.
[32]Sahu Rabindra Kumar, Panda Sidhartha, Rout Umesh Kumar. DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity. Int J Electr Power Energy Syst 2013;49:19–33.
[33]Debbarma Sanjoy, Saikia Lalit Chandra, Sinha Nidul. Automatic generation control using two degree of freedom fractional order PID controller. Int J Electr Power Energy Syst 2014;58:120–9.
Mr. S.P. Agnihotri (Santosh Prabhakar Agnihotri) obtained his Bachelor’s degree in Instrumentation and Control from University of Pone. Then he obtained his Master’s degree in Instrumentation Engineering and perusing PhD from SGGS Institute of Engineering and Technology, Vishnupuri, Nanded, Swami Ramanand Teerth Marathwada University his current research interests is time delay system.
Dr. Laxman Madhavrao WaghmarePresently, he is working as Director, SGGS Institute of Engineering and Technology, Vishnupuri, Nanded, completed B.E. (1986) and M.E. (1990) from the SGGS Institute of Engineer-ing and Technology, Nanded and Ph.D. (2001) from Indian Institute of Technology (IIT), Roorkee. His field of interest includes intelligent control, process control and, image processing. He is recipient of K.S. Krishnan Memorial national award for the best system oriented research paper (published in the IETE Research Journal). Presently working for a research project sponsored by the NRB of DRDO.