Energy-efficient Location Logging for Mobile Device
Choon-oh Lee, Minkyu Lee, Dongsoo Han
Computer Science DepartmentKorea Advanced Institute of Science and Technology Daejeon, Korea
{lcolm, niklaus, dshan}@kaist.ac.kr
Abstract— Location logging is a technique that continuously
records user’s location using various location sensing and positioning technologies. Location logs and information derived from those logs can be useful contexts for various applications. However, previous research related to recording and handling location logs failed to seriously consider heavy battery consumption. Heavy battery consumption is a serious problem in location logging research and applications, and it has obstructed location logging applications to be widely used. In this paper, we present Variable Rate Logging (VRL) mechanism to maximize battery life of continuous logging for user’s location with minimum loss of logging quality. Our mechanism can optimize any application which requires continuous recording of user’s location and dramatically extend its battery life. Evaluation results show that Variable Rate Logging mechanism has 143% longer battery life than fixed rate logging.
Keywords-component; location logging; energy-efficient
I. INTRODUCTION
Location logging is a technique that continuously records user’s location using various location sensing and positioning technologies such as GPS (Global Positioning System) and WPS (Wi-Fi Positioning System). Through location logs of a user, we can identify places where the user has visited during a day and estimate the user’s activities in those places. Moreover, location logs collected for a long period of time reflects the life pattern of the user. Therefore, location logs and information derived from those logs can provide useful context information for various applications; examples of the commercial applications are Nokia’s viNe [10], GPS log [12] for iPhone, Google Latitude [11], and GPS-memo [13] for Windows Mobile.
Previous research related to recording and handling user’s locations can be divided into two categories: coordinate-based logging and fingerprint-based logging. Coordinate-based logging records absolute geographical locations that can be plotted on the map; in most cases, location information for coordinate-based logging is acquired using GPS technology. Ashbrook and Starner [1] tried to cluster GPS fixes using K-means clustering algorithm for extracting significant places from location traces of a user. Toyama et al. [6] improved the clustering method of Ashbrook and Starner by adjusting different radii to clusters for different places, and afterwards many clustering algorithms for handling GPS location logs are suggested [18][19][22]. The most remarkable work is the time-based
clustering algorithm [2]; they regarded location logs of a user as trajectories based on time. Similar approached called CM-SMoT algorithm that discovers interesting places by extracting moves and stops from GPS trajectories of user is proposed [5].
On the other hand, fingerprint-based logging utilizes signal strength of beacons such as GSM (Global System for Mobile Communication) cell-towers and Wi-Fi access points instead of absolute location coordinates to recognize user’s location. There are many research efforts to develop indoor positioning system based on fingerprinting [17][20][21]. Also, algorithms to detect significant places by extracting entrance and departure from Wi-Fi location fingerprints are proposed: BeaconPrint [3] and PlaceSense [4]. At last, Rekimoto, Miyaki, and Ishizawa developed hardware and software prototype for continuous logging of Wi-Fi location fingerprints [7].
Most of approaches in the previous research have focused on the detection of significant places from continuously recorded locations of a user. As a result, they overlooked heavy battery consumption which can be a serious drawback of location logging. Continuous receiving location information such as GPS fixes and Wi-Fi signals results in significant losses of battery power. If a device records user’s locations using those highly power-demanded location sensors with reasonable quality, the battery will be dramatically drained. It becomes more serious problem when a location logging is performed on a commercial mobile device such as smartphone which is popularly used in these days. Since smartphone already requires lots of battery power for its various functionalities, much less battery power is allowed to be used for location logging. Therefore, even though those approaches successfully extract significant places from high-quality location logs, it cannot be deployed on a smartphone as a commercial application due to heavy battery consumption.
Heavy battery consumption is also a serious problem in the location logging applications that are already commercialized for smartphone; some of smartphone users have pointed out that those applications dramatically shorten device’s battery life. Of course, users can manually turn off the application when location logging is not necessary (e.g. when user is at work or user is sleeping.) to extend battery life, but obviously it is not the best solution because manual deactivation of logging is a nagging request to user. As a result, many smartphone users are unwilling to use those location logging applications. Thus a location logging 2010 10th Annual International Symposium on Applications and the Internet
978-0-7695-4107-5/10 $26.00 © 2010 IEEE DOI 10.1109/SAINT.2010.30
76
2010 10th Annual International Symposium on Applications and the Internet
978-0-7695-4107-5/10 $26.00 © 2010 IEEE DOI 10.1109/SAINT.2010.30
84
2010 10th Annual International Symposium on Applications and the Internet
978-0-7695-4107-5/10 $26.00 © 2010 IEEE DOI 10.1109/SAINT.2010.30
84
2010 10th Annual International Symposium on Applications and the Internet
978-0-7695-4107-5/10 $26.00 © 2010 IEEE DOI 10.1109/SAINT.2010.30
84
2010 10th Annual International Symposium on Applications and the Internet
978-0-7695-4107-5/10 $26.00 © 2010 IEEE DOI 10.1109/SAINT.2010.30
application must consume device’s battery power as little as possible to be successfully commercialized on smartphones.
The best way to reduce battery consumption for location logging in a smartphone that is embedded with non-replaceable, low-power location sensors is lowering logging rate. It is obvious that a location logging with lower logging rate will save more battery power because a device operates CPU and logging sensors less frequently. However, lowering logging rate for entire logging period inevitably decreases the resolution of location logs that is directly related to its quality. Consequently, location logs recorded at low rate may not precisely reflect user’s traces and may negatively affect to the credibility of location logging application. Therefore, an effective mechanism that reduces logging rate with minimum loss of logging quality is required.
In this paper, we present an energy-efficient logging mechanism to maximize battery life of continuous logging for user’s location with minimum loss of logging quality. Unlike the previous research which records locations in a fixed rate, our mechanism applies variable logging rates to location logging based on user’s situations. In this Variable Rate Logging (VRL) mechanism, various contexts are monitored to determine user’s current situation, and location logging can be performed at lower rate or even deactivated based on the situation. More specifically, the mechanism tries to detect moments that location logging doesn’t have to be frequent and to reduce unnecessary loggings, so it can extend device’s battery life with minimum loss of logging quality. VRL mechanism can optimize any application which requires continuous recording of user’s location and dramatically extend its battery life.
Two algorithms for VRL mechanism are proposed in this paper: standstill detection and indoor/outdoor detection. We implemented those algorithms on a smartphone and compared their battery life with fixed rate logging. In the evaluation, Variable Rate Logging mechanism achieved 143% longer battery life than that of fixed rate logging.
Remaining parts of this paper are organized as follows. In section II, we introduce related work that tried to extend battery life of continuous location logging. In section III, Variable Rate Logging mechanism is described in detail. We provide evaluation results of our mechanism in section IV. Finally, future work is mentioned in section V, and we conclude this paper in section VI.
II. RELATED WORK
Stopher, Greaves, and FitzGerald [8] designed a wearable device for continuous GPS logging and applied a simple GPS sleep mechanism to the device. In their approach, the device goes into sleep mode for 180 seconds if the device appeared as stationary for 120 seconds. Those time parameters are changeable but still static; the same parameters are applied over a whole logging period. This static sleep mechanism is obviously helpful for battery life, but mechanism’s effectiveness might be insignificant if user set too small value of the parameter for sleeping time. In contrast, a longer sleeping time may cause serious damages on logging quality because there is no way to record user’s movements while the device is sleeping.
Deblauwe and Treu [9] proposed an energy-efficient mechanism that detects entrance from or departure to predefined areas without continuous GPS logging. Normally, to detect entrance from or departure to a certain area using GPS only, it requires continuous monitoring of GPS coordinates; but they tried to reduce GPS usage by Received Signal Strength (RSS) of GSM cell towers. In their approach, once a device retrieved a GPS coordinate, it turns off GPS and estimates a distance from the last coordinate using GSM signal differences. If the estimated distance is longer than a distance from the last coordinate to a boundary of predefined area, it means that the device entered or left the area. Also, this approach can estimate rough trajectories of continuously moving device with much less usage for GPS. Since they used GSM fingerprinting which consumes less battery power than GPS, their mechanism was quite feasible and innovative. However, there is no evaluation for how much battery life is extended by their mechanism.
III. VARIABLE RATE LOGGING
As previously mentioned, battery life of location logging is closely related to how often user’s location is recorded. Logging user’s location at high rate means that a device uses location sensors to retrieve location information more frequently. Because it decreases sleep time of CPU and location sensors, battery life of device is inevitably shortened. A location logging at high rate also causes more database operations required for storing location information which induces more battery consumptions for CPU. Therefore, reducing logging rate is the most crucial factor of device’s battery life, and to extend battery life as much as possible, we have to apply the lowest rate to location logging.
To lower the logging rate, the device must use location sensors less frequently and extend sleep time of location sensors. While location sensors are in a sleep, however, the device cannot retrieve and record important changes on user’s location such as stops, moves, entrances, and departures. Therefore, as logging rate decreases to extend battery life, it is unavoidable that the quality of location logs, or the location resolution, is damaged. This phenomenon is called battery life/resolution tradeoff [16]. In the worst case that user is frequently moving in high speed, missing information because of location logging at low rate is not negligible.
To overcome battery life/resolution tradeoff, Variable Rate Logging applies different logging rates to location logging according to user’s contexts. The contexts that VRL watches are specific situations when frequent retrieval of location information is not required (e.g. user is not moving.). When such situations are detected, the mechanism performs location logging at lower rate or even deactivates it. Also, the mechanism tries to detect situations when location logging must be resumed at normal rate. Because unnecessary battery consumptions or damages on logging resolution will occur when those situations are incorrectly detected, accurate perception of those situations is the most important key of our approach.
In the following subsections, we described two algorithms for Variable Rate Logging mechanism in turn,
namely standstill detection algorithm and indoor/outdoor detection algorithm.
A. Standstill Detection Algorithm
When a device is not moving at all, continuous recording of user’s location is not necessary. For example, user’s location is almost stationary when user is sleeping at home or working at workplace. In such cases, there is a strong possibility that user puts his/her mobile device onto a desk or a bed rather than carrying it, so the device is never moved for a long period of time. According to user’s life pattern, this standstill of the device runs to several hours and is repeated almost every day; so location logging during standstill is definitely a waste of battery power. To extend battery life for location logging, therefore, it is indispensable that location logging mechanism detects the device’s standstill precisely and puts the device into a sleep.
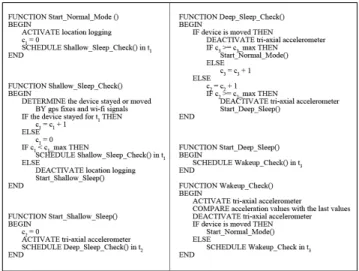
We defined two distinct sleep modes: shallow sleep mode and deep sleep mode. Shallow sleep mode is triggered if the device stays at the same place for a certain time. Once the device enters shallow sleep mode, it pauses location logging and starts close observations of device’s movements using tri-axial accelerometer which is embedded in the most of smartphones in these days. Thus, movements of the device are immediately detected in shallow sleep mode, so location logging can be resumed as soon as user moves. In the opposite case that the device is never moved for a certain time, it falls into deep sleep mode. Unlike shallow sleep mode, acceleration and orientation values from tri-axial accelerometer are sparsely monitored at a certain rate, a minute for instance. Although this sparse observation of device’s movement and orientation cannot wake up the device in an instant, it can greatly save battery power during deep sleep.
Fig. 1 shows the schematic view of standstill detection algorithm in detail. In normal mode, user’s location is continuously recorded at a certain rate. Recorded location information is stored in local database on the device, so the device can retrieve location logs at any time.
Based on the logs recorded, the mechanism firstly investigates whether the device stayed at the same place or not. The criteria of the same place are distance between GPS coordinates and similarity between Wi-Fi fingerprints. First, the device calculates a beeline distance between GPS coordinate that is most recently recorded and GPS coordinate that is recorded before time t1. If that beeline distance is
close enough to be the same place, it finally concludes a stay
Normal Mode entry/c1 = 0 do/Recording user's location
Check for Shallow Sleep entry/c1 = c1 + 1 do/Recording user's location Device stayed at the same place during t1
Device stayed at the same place during t1 Device moved to another place
Shallow Sleep Mode entry/Activating accelerometer entry/c2 = 0
c1 >= c1_max / Deactivating location logging, c3 = 0
Check for Deep Sleep entry/c2 = c2 + 1 exit/Deactivating accelerometer Device moved, c3 < c3_max / c3 = c3 + 1
Device never moved during t2
Deep Sleep Mode entry/Scheduling wakeup check in t3 c2 >= c2_max
Check for Wakeup do/Checking device's acceleration
Time, t3 is passed
Device's orientation didn't changed Device moved
Device moved, c3 >= c3_max
Figure 1. Schematic view of standstill detection algorithm
of the device based on similarity between the most recently collected Wi-Fi fingerprint and fingerprint that is collected before t1.
If the algorithm concluded that the device has been staying at the same place for time t1, the device starts a
checking procedure for shallow sleep. From that point, the device periodically checks whether it keeps staying at the same place with checking interval, t1. If the device has
moved to another place during the checking procedure, it goes back to normal mode. In the other case that the device keeps staying at the same place, a counter for shallow sleep, c1, increases for every checking interval. Checking procedure
continues until c1 becomes equal to the predefined value,
c1_max, and the device enters shallow sleep mode when the
condition is satisfied. In shallow sleep mode, location logging is deactivated, and tri-axial accelerometer that is able to closely observe device’s movement is activated instead.
After the device enters shallow sleep mode, a checking procedure for deep sleep is immediately started. The mechanism continuously monitors movements of the device and increases a counter for deep sleep, c2, with time interval,
t2, if the device didn’t moved within an interval. Unlike the
checking procedure for shallow sleep, however, the device will not immediately return to normal mode when it moved once; instead, the checking procedure for deep sleep is restarted by resetting c2 counter to zero, and a counter for
wake-up, c3 increases. A purpose of this wake-up counting is
to prevent impetuous wake-up by a slight movement of the device. Because it takes too much time to re-enter shallow sleep mode and causes lots of unnecessary location logging, it is inefficient to wake up the device due to small movements for a short period of time. The device wakes up only when c3 is equal to predefined c3_max due to unceasing
movements in shallow sleep mode, and the device resumes location logging in normal mode.
In the other case that the device did not moved at all during the checking procedure for deep sleep, deep sleep counter, c2, keeps increasing, and it becomes the same with
predefined c2_max value. Then, the device is thought to be in
standstill for a long time, so it enters deep sleep mode.
Figure 2. Pseudocode for standstill detection algorithm
78 86
86 86 86
Unlike shallow sleep mode, the device is idle in the most of the time and occasionally checks changes of acceleration and orientation of the device for every time interval, t3. Deep
sleep mode continues as long as orientation value of the device is not changed. In contrast, if orientation is much different from orientation at the last check, the device has been certainly moved during deep sleep, so mechanism wakes up the device to resume location logging. This lazy wake-up from deep sleep mode may have some delays from when the device is actually moved, so we have to assign relatively small value to wake-up checking interval, t3, to
reduce possible loss of logging quality. More details of this algorithm are described in Fig. 2.
Efficiency of this algorithm heavily depends on the activeness of a user. If a user is relatively inactive, there is a strong possibility that the device spends lots of time for deep sleep, so battery life can be dramatically extended. By contrast, when a user is very much active, this algorithm may not be able to save lots of battery power. In the worst case that the device is continuously moving without any standstill, it is also possible that battery life of the device is shortened because of additional battery consumptions for tri-axial accelerometer. However, any user has to sleep for at least a few hours per day, so the device can take a sleep for hours except when user is riding on a transport. Therefore, in the most cases, battery power that is saved by this algorithm is greater than additional power consumptions for standstill detection.
B. Indoor/Outdoor Detection Algorithm
GPS receiver which occupies most of battery power for location logging provides accurate positions in outdoor environment but has poor accuracy in indoor environment. In the most of indoor environments, connection with satellites is blocked by walls and stories, so it is usually unable to retrieve GPS fixes while GPS still requires the same battery power. If user is in a building that has glass walls or lots of window, the device may be able to communicate with some of the satellites and to retrieve user’s coordinates. However, accuracy of these coordinates is unsatisfactory because of insufficient satellites available. To maximize battery life, therefore, it is desirable to detect indoor environment and to deactivate GPS.
Among available contexts that can be used for determining whether user is currently in indoor environment or not, the most accurate and suitable context information is
Attempting Mode entry/Activating GPS without sleep
Indoor Mode entry/Activating GPS with lower rate
Outdoor Mode entry/Activating GPS with normal rate Insufficient satellites available Sufficient satellites
First fixed
Insufficient satellites available during t4 Wi-Fi AP in distance is scanned
Moving is detected by GPS
Figure 3. Schematic view of indoor/outdoor detection algorithm
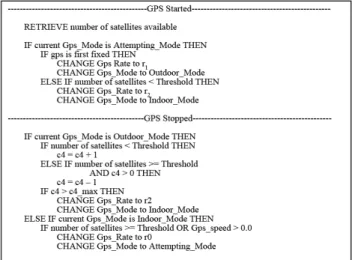
Figure 4. Pseudocode for indoor/outdoor detection algorithm the number of the satellites available for communication. When user goes out with the device, open sky is visible, and many GPS satellites are detected by the device; as soon as user enters an indoor environment, the number of GPS satellites available immediately decreases. Therefore, it is possible to detect transitions from outdoor to indoor environment using the number of satellites available and to deactivate GPS.
However, the problem is that we can count the number of satellites available only when GPS is activated and trying to connect with GPS satellites. In other words, after GPS is deactivated, there is no way to detect transition from indoor to outdoor environment using the number of satellites available. As the second best way, we applied lower rate to GPS logging in indoor environment than outdoor instead of deactivating GPS.
Fig. 3 describes the schematic view of indoor/outdoor detection algorithm. In outdoor mode, GPS coordinates are recorded at normal rate. Every time when GPS is on, the device continuously monitors the number of satellites available.
When user moves into a building, the number of satellites available dramatically decreases and remains low as long as user stays inside the building. Device enters indoor mode if the number of satellites available is constantly below a certain threshold value during time, t4. Once indoor mode is
started, device restarts GPS at lower rate than outdoor mode. It is still possible to retrieve coordinates with low accuracy for a few minutes after user entered the building, but the device keeps losing connection with satellites as time goes on. Fortunately, the device still can monitor the number of satellites available even after the connection is completely lost.
If the number of satellites increases over the threshold value during indoor mode, the device considers that user went out. However, this situation does not always happen even if user is in outdoor environment. Because open sky must be visible to detect sufficient GPS satellites, the device may not be able to detect them in urban environments which have lots of skyscrapers. Besides, it is hard to discover
sufficient satellites when user left the building by a vehicle. As a result, using the number of satellites available only as a detection criterion, the device may miss some transitions from indoor to outdoor environment. Certainly, those misses cause serious damages on logging resolution and quality.
To detect transitions from indoor to outdoor environment more precisely, we use three additional contexts. First, a transition is detected when the most recently retrieved GPS coordinate is far away from the coordinate retrieved just before entering indoor mode. Also, user is thought to be moving in an outdoor environment if newly retrieved coordinates constantly show high speed. At last, the device considers that user went out if the geographical location of currently available Wi-Fi access points (APs) is far away from the coordinate retrieved just before entering indoor mode. Geographical location of Wi-Fi APs can be obtained by utilizing WPS or by autonomous war-walking.
When the device detects a transition from indoor to outdoor environment, the mechanism should stop indoor mode and start GPS logging at higher rate. However, it is inadequate that the device directly enters outdoor mode from indoor mode since GPS has cold-start problem by nature. If GPS has been deactivated or the device is unable to communicate with satellites for a long period of time, it takes several minutes until the device firstly retrieves a GPS coordinate even under open sky. This warming-up time is forced to be longer in outdoor mode because GPS is activated at a certain rate with sleep.
Therefore, we defined attempting mode between indoor mode and outdoor mode; in attempting mode, GPS is activated without any sleep interval to establish stable satellite connections as fast as possible. It continues until the device retrieve the first GPS fix from stable connection, and then the device enters outdoor mode. In contrast, if the number of satellites available becomes lower than the certain threshold again during attempting mode, the device assumes that user is in indoor environment again and goes back to indoor mode.
IV. EVALUATION
We implemented VRL mechanism on a smartphone and evaluated its effectiveness in extending device’s battery life. Four tests were performed for the evaluation: fixed rate logging test, standstill detection test, indoor/outdoor detection test, and variable rate logging test. In fixed rate logging test, sleep interval of GPS was set to one minute, and Wi-Fi fingerprints were also collected every minute. Standstill detection test applied standstill detection algorithm to fixed rate logging test, and indoor/outdoor detection test applied indoor/outdoor detection algorithm to fixed rate logging test as well. At last, in variable rate logging test, we implemented both standstill detection algorithm and indoor/outdoor detection algorithm together on fixed rate logging test.
The parameters for the algorithms were carefully adjusted. In checking procedure for shallow sleep of standstill detection algorithm, checking interval, t1 was set to
five minutes, and c1_max was set to four; it means that a
checking procedure is performed for 20 minutes with four
check points. In checking procedure for deep sleep, checking interval, t2 was set to 10 seconds, and c2_max was set to 30
which means that the device observes its movements for five minutes for deep sleep checks. Maximum value for wake-up count, c3_max was set to five, so the device wakes up when it
is moved at least five times in shallow sleep mode. In deep sleep mode, wake-up check interval, t3 was set to one
minute; it means that the device checks changes of acceleration and orientation every one minute. Finally, in indoor/outdoor detection algorithm, t4 was set to five
minutes, and the satellite threshold value was set to six. It means that the device enters indoor mode when the number of satellites available is consistently less than six for five minutes.
Each test is implemented on a smartphone and is performed during one of the authors carries the smartphone in his everyday life. He fully charged a battery of the device before a test. While a test was being performed, the device was never used, and the display was always off to reduce unrelated battery uses as much as possible. In the most of times, he put the device in his pocket or bag; but he put it on the desk while sleeping. A test continued until the device completely ran out of battery.
For a testing device of our evaluation, we used HTC G1 smartphone [15]. The device is based on Android OS version 1.6, and various sensors that our mechanism requires are embedded: standalone GPS receiver, Wi-Fi receiver, and tri-axial accelerometer. Program for evaluation is implemented as background service. It continuously collects battery statuses, GPS fixes, and Wi-Fi fingerprints and automatically stores those data into local database in the device.
Maximum battery capacity of HTC G1 is specified as 1150mAh in the device’s specification. However, this value is just a minimal requirement from battery manufacturing, not an actual capacity that a battery can maximally have. Actual maximum capacity of a battery may be different from another even though two batteries are identically manufactured. Moreover, maximum capacity of a battery slightly decreases as discharging and charging are repeated. The only way to measure current capacity of a battery is known as continuous observation on currents from discharging battery [14], but this method is not completely confident because of errors. As a result, actual capacity that a battery can maximally have is completely unknown.
Unique characteristics of battery that are mentioned above hindered accurate evaluation for battery life of our mechanism. Because it is almost impossible to prepare four batteries which have the same capacity, we were not able to perform four tests simultaneously on four smartphones with the same circumstances. Also, performing four tests on the same smartphone in turn was not the best option because battery capacity for each test varies. Therefore, we admitted that preparing exactly same circumstances for evaluation of battery life is unfeasible; as the second best way, we assigned bigger battery capacity to fixed rate logging test than Variable Rate Logging mechanism. Because maximum capacity of battery slightly decreases as it is discharged and charged, four tests were performed in turn on the same smartphone in a certain sequence: fixed rate logging test Æ
80 88
88 88 88
Figure 5. Constrast of battery life time of each mechanism standstill detection test Æ indoor/outdoor detection test Æ
variable rate logging test. This sequence surely allows us to assign less capacity to variable logging mechanism.
Fig. 5 shows that Variable Rate Logging mechanism saved considerable battery power in spite of less maximum capacity of battery. In the result of fixed rate logging test, the device’s battery is discharged almost linearly, and battery life of the test was 18.2 hours. Standstill detection test lasted for 30.8 hours. During the test, the device was sleeping in flat slopes of the graph, and time spent for deep sleep was 12.9 hours. Indoor/outdoor detection test shows relatively gentle slopes in indoor mode and lasted 27.9 hours. At last, variable rate logging test that applies both algorithms to fixed rate logging shows battery life for 44.2 hours; it extended 143 percent of battery life of fixed rate logging test.
Amount of battery life extended by Variable Rate Logging mechanism heavily depends on user’s activeness. More specifically, effectiveness of standstill detection algorithm depends on how many hours the user put the device in standstill; effectiveness of indoor/outdoor detection algorithm depends on how many hours the user spent in indoor environments. In Fig. 6, we defined two ratios to express user’s activeness numerically: deep sleep ratio and indoor ratio. Bigger value for deep sleep ratio means that the
Figure 6. Equation for activeness ratios
device spent more time for deep sleep, and similarly, bigger value for indoor ratio means that the user spent more time in indoor environments. Extended battery life of the device increases as value of those two ratios increase.
The standstill detection test in Fig. 5 has 0.417 as deep sleep ratio, and indoor ratio of the indoor/outdoor detection test was 0.625. Finally, the variable rate logging test shows 0.383 for deep sleep ratio and 0.736 for indoor ratio. Overall results of the four tests in Fig. 5 are summarized in Table 1.
V. FUTURE WORK
Algorithms for Variable Rate Logging mechanism try to detect user’s situations that do not require frequent location logging, and the device applies lower logging rate or deactivates location logging according to the detected situations. Loss of Logging quality that may be caused by low logging rate can be minimized since a location logging is actually unnecessary in those situations. Generally, detecting of those situations and minimizing loss of logging quality seem to work quite well; however, we have not performed an evaluation to numerically prove the mechanism’s correctness which we are currently working on.
Also, we are performing the evaluation for damages on logging quality that can be caused by our mechanism. Based on the data that is collected from real life, we are planning to
TABLE I. SUMMARY OF EVALUATION RESULTS
Test Battery life (hr)
Activeness ratios Extended (hr/%) Deep sleep Indoor
Fix rate logging test 18.20609 0.0 0.0 0.0/ 0% Standstill detection test 30.87916 0.41747 0.0 12.67307/ 69.61% Indoor/outdoor detection test 27.94397 0.0 0.62529 9.73788/ 53.49% Variable rate logging test 44.28178 0.38300 0.73657 26.07569/ 143.23%
calculate a numerical value for loss of logging quality. VI. CONCLUSION
In this paper, we proposed Variable Rate Logging mechanism that maximizes battery life of continuous location logging. Based on user’s context, VRL aims to extend battery life of location logging as long as possible and to minimize loss of logging resolution at the same time. For these purposes, we implemented and evaluated two algorithms for VRL: standstill detection algorithm and indoor/outdoor detection algorithm. Our evaluation results showed that battery power that is saved by VRL mechanism is much greater than addition power consumption for monitoring user’s context.
In fact, to achieve maximum battery life of location logging, hardware requirements such as high-capacity battery, low-power CPU, and low-power GPS should be satisfied before any optimization. However, after those hardware requirements are satisfied by the state-of-the-art technologies, VRL can always provide better energy-efficiency than fixed rate logging. Therefore, our approach can be applied to any system that continuously records user’s location and can optimize battery life of location logging.
ACKNOWLEDGMENT
"This research was supported by the MKE (The Ministry of Knowledge Economy), Korea, under the ITRC (Information Technology Research Center) support program supervised by the NIPA (National IT Industry Promotion Agency)" (NIPA-2010-(C1090-1011-0013))
REFERENCES
[1] D. Ashbrook and T. Starner, “Using GPS to Learn Significant Locations and Predict Movement across Multiple Users,” Personal and Ubiquitous Computing, vol. 7, no. 5, Oct. 2003, pp. 275-286, doi:10.1007/s00779-003-0240-0.
[2] J.H. Kang, W. Welbourne, B. Stewart, and G. Borriello, “Extracting Places from Traces of Locations,” ACM SIGMOBILE Mobile Computing and Communications Review, vol. 7, issue 3, Jul. 2005, pp. 58-68, doi:http://doi.acm.org/10.1145/1094549. 10994558 [3] J. Hightower, S. Consolvo, A. LaMarca, I. Smith, and J. Hughes,
“Learning and Recognizing the Places We Go,” Lecture Notes in Computer Science, vol. 3660, 2005, pp. 159-176, doi:10.1007/ 11551201_10.
[4] D.H. Kim, J. Hightower, R. Govindan, and D. Estrin, “Discovering Semantically Meaningful Places from Pervasive RF-beacons,” Proceedings of the 11th international conference on Ubiquitous Computing (Ubicomp 09), ACM, Sep. 2009, pp. 21-30, doi:http://doi.acm.org/10.1145/1620545.1620549.
[5] A.T. Palma, V. Bogorny, B. Kuijpers, and L.O. Alvares, “A Clustering-Based Approach for Discovering Interesting Places in Trajectories,” Proceedings of the 2008 ACM Symposium on Applied Computing (SAC 08), ACM, Mar. 2008, pp. 863-868, doi:http://doi.acm.org/10.1145/1363686.1363886.
[6] N. Toyama, T. Ota, F. Kato, Y. Toyota, T. Hattori, and T. Hagino, “Exploiting Multiple Radii to Learn Significant Locations,” Lecture Notes in Computer Science, vol. 3479, 2005, pp. 157-168, doi:10.1007/11426646_15.
[7] J. Rekimoto, T. Miyaki, and T. Ishizawa, “LifeTag: WiFi-Based Continuous Location Logging for Life Pattern Analysis,” Lecture Notes in Computer Science, vol. 4718, 2007, pp. 35-49, doi:10.1007/978-3-540-75160-1_3.
[8] P.R. Stopher, S.P. Greaves, and C. FitzGerald, “Developing and Deploying a New Wearable GPS Device for Transport Applications,” the Second International Colloquium on the Behaviousral Foundations of Integrated Land Use and Transportation Models: Frameworks, Models, and Applications, Toronto, Jun. 2005.
[9] N. Deblauwe and G. Treu, “Hybrid GPS and GSP Localization – Energy-efficient Detection of Spatial Triggers,” 5th Workshop on Positioning, Navigation and Communication (WPNC 2008), IEEE, Mar. 2008, pp. 181-189, doi:10.1109/WPNC.2008.4510373. [10] Nokia viNe, http://vine.nokia.com/
[11] Google Latitude, http://www.google.com/latitude/ [12] GPS Log, http://gpslogapp.com/
[13] GPS-memo, http://www.gps-memo.com/
[14] S. Park, A. Savvides, and M. Srivastava, “Battery Capacity Measurement and Analysis using Lithium Coin Cell Battery,” Proceedings of the 2001 International Symposium on Low Power Electronics and Design (ISLPED 01), ACM, 2001, pp. 382-387, doi:http://doi.acm.org/10.1145/383082.383187.
[15] HTC G1, Product Overview, http://www.htc.com/www/product/ g1/ [16] D. Raskovic and D. Giessel, “Battery-Aware Embedded GPS
Receiver Node,” 4th Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services (MobiQuitous 2007), IEEE, Aug. 2007, pp. 1-6, doi:10.1109/MOBIQ.2007. 4450986. [17] P. Bahl and V.N. Padmanabhan, “RADAR: an In-building RF-based
User Location and Tracking System,” 19th Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2000), IEEE, Mar. 2000, vol. 2, pp. 775-784, doi:10.1109/INFOCOM. 2000.832252.
[18] P. Nurmi and S. Bhattacharya, “Identifying Meaningful Places: The Non-parametric Way,” Lecture Notes in Computer Science, vol. 5013, 2008, pp. 111-127, doi:10.1007/978-3-540-79576-6_7. [19] C. Zhou, D. Frankowski, P. Ludford, S. Shekhar, and L. Terveen,
“Discovering Personally Meaningful Places: An Interactive Clustering Approach,” ACM Transactions on Information Systems, vol. 25, issue 3, Jul. 2007, pp. 12, doi:http://doi.acm.org/10.1145/ 1247715.1247718.
[20] J. Krumm and E. Horvitz, “LOCADIO: Inferring Motion and Location from Wi-Fi Signal Strengths,” 1st Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services (MobiQuitous 2004), IEEE, Aug. 2004, pp. 4-13, doi:10.1109/MOBIQ.2004.1331705.
[21] A. LaMarca, Y. Chawathe, S. Consolve, J. Hightower, I. Smith, J. Scott, T. Sohn, J. Howard, J. Hughes, F. Potter, J. Tabert, P. Powledge, G. Borrriello, and B. Schilit, “Place Lab: Device Positioning Using Radio Beacons in the Wild,” Lecture Notes in Computer Science, vol. 3468, 2005, pp. 116-133, doi:10.1007/ 11428572_8
[22] F. Schmid and K.F. Richter, “Extracting Places from Location Data Streams,” 2nd International Workshop on Ubiquitous Geographical Information Services, 2006. 82 90 90 90 90