Abstract— This paper reports on the analysis of human studies for the purpose of finger grasp using Gaussian-Principal Component Analysis (PCA) and PCA-Best Matching Unit (BMU). The method purposes to find the best grasping feature data using GloveMAP which is based on the fingers adapted grasping force movement. Gaussian filter method functions to smoothen the force signal at the same time capable to eliminate / remove the overshoot signal and suitable to be used for filtering grasping force input signals while minimizing the rise and fall time of the grasping object. Meanwhile for the finger grasping group features, the method of Best Matching Unit (PCA-BMU) was proposed whereas the concept of Euclidean Distance could be justify by the best grouping features according to the best neuron or winning neuron. The conclusion will determine grasping features of subject to grasp the experimental object with the thumb, index and middle fingers of GloveMAP. Based on fingers adapted grasping force movement, this study gives the grasping features in order to justify the best grasping for each subject grasp behavior.
Index Term— Grasp feature, grasping force human grasping data, grasp behavior, and PCA-best matching unit (PCA-BMU)
I. INTRODUCTION
THERE are too many applications in this era that related to human gesture which is include parts of human body such as hands, face, body and many more. Hand gesture is one of the famous gestures used in daily life. People use hand gesture to enhance the communication with others to deliver the information of thoughts effectively. This hand gesture will give a lot of important information of fingers or hand movement that can be implemented in the industrial applications such as video games industry, biomedical instrument, sports science, surveillance systems and many more. A device known as a Dataglove is presented as a medium to measure the information gain from hand or fingers activities. Dataglove is known as cyberglove or wired glove and it is a device that can be donned by human. Any of physical data can be captured by this technology using various sensors such as bending sensor or mostly known as flexible bend sensor, force sensor or force resistive sensor, tactile sensor and other types of sensor.
Nazrul H. ADNAN is with the Kolej Kemahiran Tinggi Mara (KKTM), Mukim Serom 4 & 5, 84410 Ledang, Johor Darul Takzim, MALAYSIA. (corresponding author phone: +60194786589; fax: +6069756203; email:
Mahzan T. was with Kolej Kemahiran Tinggi Mara (KKTM), Mukim Serom 4 & 5, 84410 Ledang, Johor Darul Takzim, MALAYSIA, Phone:
+60192748040; email: [email protected].
Khairunizam WAN was with 3Advanced Intelligent Computing and Sustainability Research Group, School of Mechatronic, Universiti Malaysia Perlis Kampus Pauh Putra, 02600 Arau, Perlis, MALAYSIA,
Phone: +60192298030; email: [email protected] Nabilah H.E was with 3Advanced Intelligent Computing and Sustainability Research Group, School of Mechatronic, Universiti Malaysia Perlis Kampus Pauh Putra, 02600 Arau, Perlis, MALAYSIA,
Phone: +60135903062; email: [email protected]
Dataglove is also known as parts of “Haptic Science”, which is give meaning as science of applying tactile sensation to human interaction through computer.
Datagloves are one of several types of electromechanical devices used in haptics applications. Haptics refers to sensing and manipulation through touch while haptic device usually is a device which involves all aspect of information acquisition and object manipulation through humans, machines or combination of them. It is call physical contact between computer and user through a device that sensing movement of body such as mouse, joystick, keyboard or an input / output device. Here, researches have been conduct to build other version of Dataglove that share similar purpose known as GloveMAP.
There are a several types of object that involved and based on Cutkosky taxonomy, the lists of objects are as follows; (a) Power Grip (Ball, Cylinder, Pen and Key), and (b) Precision Grip (Disc, Scissors, Pins and Paper). According to Cutkosky [1], all subjects should confine to single-handed operations and there should have been a better appreciation of how task requirements and object geometry combine to justify the grasp choice for better result of human grasp. The next process flow is to eliminate or minimize the unwanted signal and noise by using Gaussian Filter. Gaussian Filtering makes grasping signal become smoother and lessens the abrupt changes in signal frequency. Then the grasping force signals are analyzed using PCA. Since PCA functions as data reduction, PCA becomes the first choice method in reducing the redundancy in grasping signal. PCA is capable to generate an “Eigenfinger” for thumb, index and middle fingers of grasping data.
This research paper is structured as follows: Section 2 addresses the literature review of the related researches to the several approaches, applications and problems of recognizing the fingers grasping force signal. Section 3 describes the methodologies of the system. Section 4 will present the results and discussions. Finally on section 5 described the conclusions and proposing some possible future work.
II. LITERATURE REVIEW
There are numerous literatures on grasping force analysis and optimization developed over the last two decades. Yoshikawa [2] introduced the concepts of active and passive contact forces, and classified force closure into passive, active and hybrid closures on the robotic hand especially for the robotics hand grasp. The author also states to give the conditions for each types of force closure for a robotics mechanism constrained. The effect of object weight on grasping force has been investigated by Westling et al. [3]. The object surface friction plays an important role in determining and controlling the grasping force, and it has been investigated by Howe et al. [4] and Tremblay et al. [5].
Analysis of Object Grasp Force Using
PCA-BMU Approach
Shunji SHIMIZU et al. [6] develop the sensory glove called as MKIII for measuring the grasping force distribution among the human grasp activities. The sensory glove was developed using sixteen sheets of sheet type pressure distribution sensor.
For this research, GloveMAP was developed using three flexiforce sensors that attached at surface / palm of the thumb, index and middle fingers. Figure 1 shows the sample of flexiforce sensor that is intended for reading forces that are perpendicular to the sensor plane. According to [7] flexiforce sensor is suitable to be used for medical compression bandages (MCB) to map the pressure applied by compression products at multiple points. Flexiforce sensor also capable to be function as haptic interface [8] and visual sensing systems by a virtual feel [9][10][11].
In this research paper the Gaussian filtering method application is for noise suppression application whereas that the noise is smoothed out, at the same time the signal is also distorted. Timothy Popkin et al. [12] used Gaussian filter for solve the blurring of images and Gaussian filter capable to produce high accuracy and at greatly reduced computational cost compared to the traditional method. The example of waveform to perform the Gaussian filter was shown in fig. 2. For the dimensional data reduction method for grasping force feature classification is using principal component analysis (PCA) method. PCA capable to quantize and characterize the variance in hand / grasping posture of novel transformation task [13].
Fig. 1. GloveMAP Dataglove and Flexiforce Sensor
Fig. 2. Gaussian Filter
III. METHODOLOGY
The measures of the three main finger movements are well-defined in a marginally in different way of grasp due to
its special kinematical structure. According to Radwin, R. G.et al. and Swanson B. et al. stated that thumb, index and middle fingers give more grips and stronger compare to the other fingers (ring and little fingers). Both researchers used many items in order to determine the best finger usage such as chuck, pulp, and lateral pinches and these items are tested to 100 subjects [14][15]. Fig. 3 shows the example of fingers grasp testier and Fig. 4 shows a sample of human grasp object.
Fig. 3. Experiment of fingers grasps [14]
Fig. 4. Object grasping
A. Gaussian Filtering Techniques
Fig. 5. a) Unfiltered voltage output with noise b) Voltage with Gaussian Filter
B. Polynomial regression
The output signal of the force resistive sensor used in this research is in a voltage value which is in range of 0 to 5V. These signals are need to be converted into a force value to give a better understanding about force applied to the fingertips during grasping activities. The force resistive sensor’s datasheet shows the weight (g) versus voltage (V) graph as in Fig. 6. Based on the graph, the information of weight (g) value can be determined. In order to find the relationship between weight and voltage, the polynomial regression is used. The polynomial regression is one types of regression analysis used to model a nonlinear relationship between two different variables (independent x and dependent y) to fit the nonlinear data and to describe its phenomena. Fifth degree polynomial is determined as the best data fit compared to the other polynomial equation such as linear, quadratic and cubic.
The voltage output of the grasping object is used to substitute into the x variable in the fifth degree polynomial equation as in Equation 1 to determine the weight (g) value (y variable).The information of weight (g) are then will be used in the next step in order to convert the output voltage signal into the output force signal.
(1)
Fig. 6. The 5th degree polynomial equation applied to the graph
C. Force formula
Force value can be calculated by using Newton’s second law, as in Equation (2). Based on the polynomial regression applied to the graph of weight (g) versus voltage (V), weight (g) data is determined. The values of weight (g) are then
converted to mass by dividing the values with 1000 to change from gram to kilogram. Acceleration or gravity needs to be considered due to the Newton’s law in finding force value.
(2)
Where ,
F = force in Newton m = mass in kilogram a = acceleration ( gravity)
D. PCA-Best Matching Unit (BMU) Feature
The Best Matching Unit feature is taken from the competitive learning of PCA as shown in Fig. 7. Based on Fig. 4, the output of PCA, namely as the set of principal components, are functioning as the input of BMU. The BMU objective is to cluster all data into a set of groups. The clustering is also capable to separate the data which appear similar, close to one another and place the very different ones distant from one another. Suppose that the input y = [ , ,….., ]T, the weight vector of the neuron j in BMU is = [ , ,….., ]T.
Fig. 7. PCA and BMU
IV. RESULT AND DISCUSSION
In this section, the analyses of overall step results are started accordingly from data acquisition, data analysis, features usage, and finally classifier recognition result.
A. Experiment Setup
This experiment classify the grasping force of different shapes of objects, about 10 human subjects are participated in this experiment in order to obtain the information data from the grasping activities. These objects were selected based on the pattern grip that excessively used thumb, index and middle fingers. The selected objects are placed on the plane surface and the subjects are asked to grasp the objects and hold it for about 3seconds. Fig. 8 shows how the signal extracted using GloveMAP Dataglove.
B. Human Grasping Force Data
due to the non-contact of fingers and object. Meanwhile, the voltage signal at 2.0-8.0s show the information of the fingers produced from the grasping activity. Thumb fingers indicated about 2.69-2.84 volt, the higher voltage from the other fingers while the index and middle fingers indicated about 2.5 -2.74 volt and 2.31-2.49 volt respectively. Fig. 9. shows the results of finger force for object cylinder.
Fig. 8. GloveMAP data extracted for Ball and Dice Object
Fig. 9. The signal output pattern from the object grasping activities.
Table I
The output transformation data in voltage into the force form.
C. PCA-Best Matching Unit (PCA-BMU)
The process of justifying the human grasping data involves several grasping groups and forming a component identified as nodes or neuron. The group of neurons basically has one main neuron located at the center of group of neurons, which is the winning neuron or centroid. Based
on the explanation in the previous chapter, centroid or the winning neuron is formed by the competition of each neuron for representation of the group of data. The process of competing occurs until a next competing between other neuron except the centroid or winning neuron had been finalized. To determine the PCA-Best Matching Unit (PCA-BMU) of the grasping data, the concept of neighborhood between neuron was applied. So, the next step was calculating all neurons nearby the centroid or winning neuron as shown in Fig. 10. One method to calculate the neighborhood between nodes and centroid or winning neuron is the Euclidean distance. The steps to determine the nearest node to the winning neuron or centroid are stated below.
1) All nodes were justified using Euclidean Distance to winning neuron or centroid.
2) The equivalent or nearest node matching with any of the centroids were justified.
3) The nearest nodes to the winning neuron or centroid will form a group of node identified as “Cluster”.
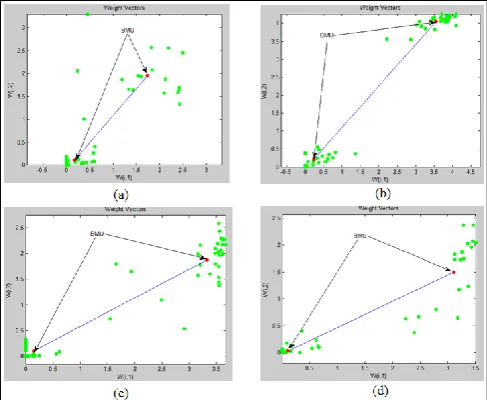
Fig. 10 also shows the nodes that stay far away from the BMU could be eliminated in order to get the best BMU neighborhood and at the same time BMU capable to help PCA form grasping force features. Figure 11 shows the clustering grasping feature for PCA-BMU approach. The figures show that the outer data (stated in the figure 10) could be eliminated or the data range could be reduced. The reduction / eliminate process should be considered because of the grasping force feature itself, could be more accurate and always emerges. The figures also show the 2 groups of grasping force. Group 1 shows the maximum data features compare to the Group 2. Meaning that whichever the clustering group shows the maximum dataset, the selected clustering group could be called as the grasping force feature.
Fig. 11. PCA-BMU data clustering for fingers grasping (a) Ball (b) Glass (c) Cylinder (d) Dice
V. CONCLUSION AND FUTURE WORKS
In this paper, we proposed the method to classify fingertip grasping force signal for several selected objects which is based on Polynomial Regression and PCA-BMU techniques. The chosen of Best Matching Unit (BMU) for this research capable to generate the best method to smoothen up the grasp signal of grasping features without any noise disturbance. Experimental results show that the both method works well in defining grasping force types with only a usage of few principal components and also capable to identifying the grasp type of an input motion data. For future plan works, the results are by adding the signal processing technique in the research. This signal processing will be employed in solving the problem of analysing more sophisticated signal pattern especially on the signal produced during transition gesture and continuing gesture
ACKNOWLEDGMENT
Special thanks to all members of KKTM Ledang and MARA for providing the research equipment’s and internal foundations. This work was supported by the Majlis Amanah Rakyat (MARA).
REFERENCES
[1] Cutkosky, M. R. (1989). On grasp choice, grasp models, and the design of hands for manufacturing tasks. Robotics and Automation, IEEE Transactions on, 5(3), 269-279.
[2] T.Yoshikawa. Passive and active closures by constraining mechanisms. In Proceedings of IEEE International Conference on Robotics and Automation, pages 1477–1482, 1996, DOI: 10.1109/ROBOT.1996.506914
[3] Westling, G. and R. S. Johansson. Factors Influencing the Force Control During Precision Grip. Experimental Brain Research, volume 513, pp. 277- 284, 1984.
[4] Howe, Robert D., Nicolas Popp, P. Akella, Imin Kao and M. Cutkosky. Grasping, manipulation and control with tactile sensing. Proceedings of the IEEE International Conference on Robotics and Automation. pp. 1258-1263,1990, DOI: 10.1109/ROBOT.1990.126171
[5] Tremblay, Marc R. and Mark R. Cutkosky. Estimating friction using incipient slip sensing during a manipulation task. Proceedings of the IEEE International Conference on Robotics and Automation, pp. 429-434,1993, DOI: 10.1109/ROBOT.1993.292018
[6] Shunji SHIMIZU, Makoto SHIMOJO, Sigeru SATO, Yoshikazu SEKI, Akihiko TAKAHASHI, Yukio INUKAI and Matsutaro YOSHIOKA. The Relationship between Human Grip Types and
Force Distribution Pattern in Grasping. in ICAR IEEE, pp. 299-304, 1994,DOI: 10.1109/ICAR.1997.620198
[7] Jawad Al Khaburi, Abbas A. Dehghani-Sanij, E. Andrea Nelson and Jerry Hutchinson. Pressure Mapping Bandage Prototype: Development and Testing. In International Conference on Biomedical Engineering (ICoBE), 430-435, 2012.
[8] Zhengmao Ye and Gregory Auner. Haptic Interface Prototype for Feedback Control on Robotic Integration of Smart Sensors. In IEEE, 995-1000, 2003, DOI: 10.1109/CCA.2003.1223146
[9] J. E. Colgate and G. G. Schenkel. Passivity of a Class of Sampled-Data System: Application to Haptic interface. Journal of Robotic Systems 14(1), 31-41, 1997.
[10] A. Hannaford and J. Ryu. Time-Domain Passivity Control of Haptic Interfaces. In IEEE Transactions on Robotics and Automation, Vol. 18, No. 1, I-10, 2002, DOI: 10.1109/70.988969
[11] B. E. Miller, J. E. Colgate and R.A Freeman. Guaranteed Stability of Haptic System with Nonlinear Virtual Environments. In IEEE Transactions on Robotics and Automation, Vol. 16, No. 6, 712-719, 2000, DOI: 10.1109/70.897782
[12] Timothy Popkin, Andrea Cavallaro, and David Hands. Accurate and Efficient Method for Smoothly Space-Variant Gaussian Blurring. In IEEE Transactions On Image Processing, Vol. 19, No. 5, pp. 1362-1370, 2010, DOI: 10.1109/TIP.2010.2041400
[13] Ramana Vinjamuri, Mingui Sun, Douglas Weber, Wei Wang, Donald Crammond and Zhi-Hong Mao. Quantizing and Characterizing the Variance of Hand Postures in a Novel Transformation Task. In 31st Annual International Conference, 5312-5315, 2009.
[14] Radwin, R. G., Oh, S., Jensen, T. R., & Webster, J. G. (1992). External finger forces in submaximal five-finger static pinch prehension. Ergonomics, 35(3), 275-288.
[15] Swanson, A. B., Matev, I. B., & De Groot, G. (1970). The strength of the hand.Bull Prosthet Res, 10(14), 145-153.
Nazrul H. ADNAN received his Bachelor Engineering (Hons) in Power
Electrical from Universiti Teknologi MARA (UiTM) and Master Engineering in Advanced Manufacturing Technology from Universiti Teknologi Malaysia (UTM) since 2004 and 2010 respectively. He was awarded Ph.D from Universiti Malaysia Perlis (UniMAP) in 2015 where his Ph.D thesis interest is in Biomedical, BioScience, Human-Computer Interaction (HCI), Product Design, Artificial Intelligence, Signal Processing and Machine Design.
Mahzan T. received his Bachelor Electrical Engineering (Hons) in Control
& Instrumentation from University Technology Malaysia (UTM) and Master Technical Education in Industrial Electronics from University Tun Hussein Onn Malaysia (UTHM) since 1997 and 2007 respectively. Currently he is Director of Kolej Kemahiran Tinggi Mara Ledang, Johor whose responsible for the strategic positioning and pursuit of strategic goals as derived by MARA.
Khairunizam WAN received his B. Eng. degree in Electrical & Electronic
Eng. from Yamaguchi University and Ph.D. in Mechatronic Eng. from Kagawa University, in 1999 and 2009 respectively. He is currently a Senior Lecturer at School Of Mechatronic Engineering, University Malaysia Perlis. He is member of Board of Engineer and Institute of Engineer, Malaysia. His research interest is in Human-Computer Interaction (HCI), Intelligent Transportation System, Artificial Intelligence and Robotics.
Nabilah H.E received her B.Eng. degree in Mechatronic Engineering from
![Fig. 3. Experiment of fingers grasps [14]](https://thumb-us.123doks.com/thumbv2/123dok_us/1359224.1645000/2.595.92.247.605.725/fig-experiment-fingers-grasps.webp)