Mission-Oriented RM Modeling for Support
Object System
Le Chen, Hongmin Yu, Zhengping Shu, Yuan Li Academy of Equipment Command & Technology Department of Equipment Command, Beijing, China
Email: [email protected],
Abstract—With the development of global incorporation, mission of military equipments were getting diversification. In addition to traditional combat mission, they also needed to accomplish other tasks, such as disaster rescue. These transformations induced many difficulties to logistics support. This paper mainly focused on decomposing operational mission, and constrcuting mission-oriented reliability and maintainability parameter set for equipments. Consequrntly, RM model of baisc equipment combat unit was established, with multiple modeling theories and methods, such as phased-mission system and reliability block diagram, etc. This model could provide the foundation for operational mission-oriented support resource deployment and support efficiency evaluation.
Index Terms—mission-oriented, reliability, maintainability, support object system, phased-mission system, reliability block diagram
I. INTRODUCTION
Generally speaking, Combat Unit is the military unit that can implement the operational and training mission. Equipment Combat Unit (ECU) is the weapon systems and their corresponding support system of combat unit. Support object is equipments or the collection of weapons that can implement different military tasks directly. According to the level classification, combat unit can be called Basic Equipment Combat Unit (BECU), when it is classified into smallest military unit that can implement the operational and training mission independently [1]. Support Object System (SOS) is an organic integration with specific functions composed of many interact and interdependent weapons and equipment. Actully,SOS corresponds with the subject of ECU implementing operational missions. The reason why we call it support object system is from support view.
In combat process, the deployed number and operational performance of SOS are all related to RMS level. Therefore, the configuration of corresponding support system must adapted to SOS. In another word, support system must be constructed based on the constitution and RMS level of SOS. Consequently, RMS level of SOS is the key for operational effectiveness improvement of weapon system. The research on RMS theories and methods of SOS mainly focuses on single equipment or lower level at present [2]-[11]. These theories and methods is only applicable to BECU based
on certain assumptions, and it is not applicable to ECU or higher level equipment system at all [12]. Thus, the RMS theory and method of SOS for higher level equipment systems, especially the construction of RMS parameter system and model, is a very complicated problem and needs to be further investigated.
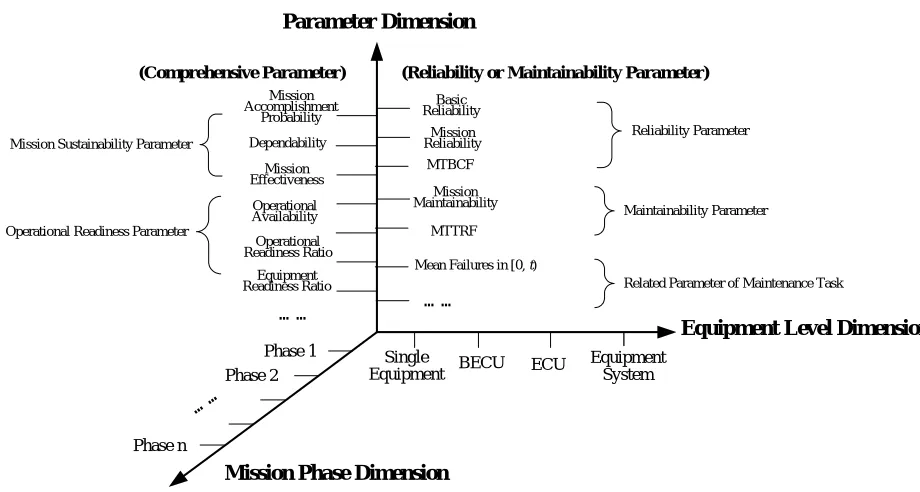
II. RESEARCH FRAMEWORK OF RMMODELING FOR SOS From the view of research target, the core of RM modeling is to solve the capacity assessment to accomplish the task for SOS, and to determine the maintenance support requirements. The ability to accomplish the task can be described by combat readiness and mission sustainability of SOS. The maintenance support requirements can be determined by the mission injury and SOS RM level. Therefore, the RM modeling target of SOS can be converted into a set of general attributes, composed of comprehensive attribute and monomial attribute. Comprehensive attribute describes the reliability and maintainability characteristics of SOS holistically. Monomial attribute describes the RM features of SOS from one aspect, including the reliability and maintainability, etc.
From the view of research object, RM modeling of SOS is carried out in different levels of equipment systems. Because of the difference of essence, composition and characteristics for different levels SOS, their target attributes differ dramatically. Thus, the RM model of each level SOS should be established separately.
The working of equipment is reflected through the form of mission. Operational mission in time sequential is generally a very complicated process. It is constituted with a series of operations or multiple sub-missions. Operations and sub-mission can be decomposed into a series of phases. The working style, intensity and time of SOS in different mission phases, may be different in substance. Therefore, the time domain of SOS modeling can be divided into a series of continuous and unoverlapped phases. In actual operation process, RM model of SOS must be constructed according to different mission phases.
Equipment Level Dimension Parameter Dimension
Mission Phase Dimension
Basic Reliability
Phase 1 Phase 2
Phase n ……
Mission Accomplishment
Probability
(Comprehensive Parameter) (Reliability or Maintainability Parameter)
… …
Single
Equipment ECU
Equipment System Dependability
Mission Effectiveness
Operational Availability
Operational Readiness Ratio
… …
MTBCF
MTTRF Mission Maintainability
Mean Failures in [0, t) Mission Sustainability Parameter
Operational Readiness Parameter
Reliability Parameter
Maintainability Parameter
Related Parameter of Maintenance Task
BECU Equipment
Readiness Ratio
Mission Reliability
Figure 1. Three-dimension research framework of RM modeling for SOS.
III. RMPARAMETER SYSTEM FOR SOS
A. Operational Mission Description
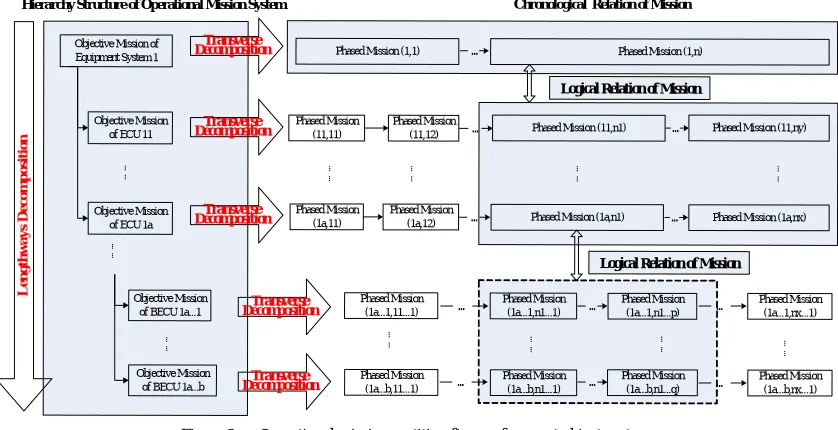
It is a very complicated work of operational mission decomposition for SOS. It includes longitudinal decomposition according to the hierarchy of SOS, and transverse decomposition according to the mission phases. The operational mission system of SOS is very complex, as shown in Fig. 2.
It is can be inferred from Fig. 2 that according to the hierarchy structure of SOS, objective mission is decomposed lengthways from top to bottom levels. Consequently, the operational mission objective of top level will be decomposed to each support object. From this perspective, when we construct the mission-oriented RM parameter set of SOS, we first need to select and describe the RM comprehensive parameters for objective mission.
Meanwhile, the objective mission of every level SOS can be divided into a series of phased mission according to chronological order and mission features. At every phased mission, the functional configuration and operation characteristics of SOS are totally different, so it is necessary to use different RM parameters to describe it. From this perspective, when we construct the mission-oriented RM parameter set of SOS, we need to select and describe the RM parameters aiming at every phased mission.
Through the analysis of operational mission system, we can conclude that the mission-oriented RM parameter set of SOS can be constructed from two aspects: RM parameter verification according to objective mission and phased mission.
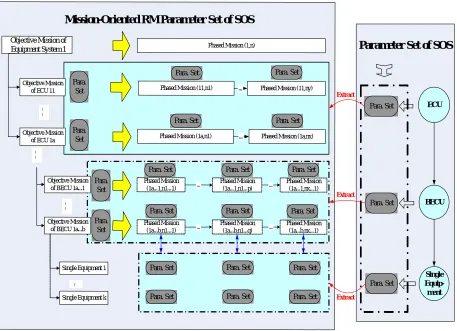
B. Construction Method of RM Parameter Set for SOS The construction of mission-oriented RM parameter set of SOS should take the RM parameter set of SOS as foundation, and extract parameters from corresponding level SOS RM parameter set according to different mission, as shown in Fig. 3.
It is can be inferred from Fig. 3 that the operational mission of top-level SOS can be divided into several mission phases. Each phased mission can be decomposed downwards according to the hierarchy structure of SOS. Therefore, when we construct the mission-oriented RM parameter set, we decompose every phased mission downwards from top to bottom level of SOS, and select parameters suitable for describing characteristics of phased mission aiming at every support object.
Objective Mission of Equipment System 1
Objective Mission of ECU 11
Objective Mission of ECU 1a
Objective Mission of BECU 1a...1
Objective Mission of BECU 1a...b
…
…
Phased Mission (1a...1,11...1)
Phased Mission (1a...1,n1...1)
…
…
Phased Mission (1a...1,n1...p)
Phased Mission (1a...1,nx...1) Phased Mission (1,1) Phased Mission (1,n)
Phased Mission (11,11)
Phased Mission (11,12)
Phased Mission (1a,n1) Phased Mission (1a,nx)
…
…
Phased Mission (1a,11)
Phased Mission (1a,12)
Phased Mission (1a...b,11...1)
Phased Mission (1a...b,n1...1)
Phased Mission (1a...b,nx...1)
…
…
…
… …
…
…
…
…
… …… …… ……
L
en
g
th
ways
De
com
p
osit
ion
Logical Relation of Mission Hierarchy Structure of Operational Mission System Chronological Relation of Mission
Phased Mission (11,n1) Phased Mission (11,ny)
Phased Mission (1a...b,n1...q)
Logical Relation of Mission
… …
… …
…
Transverse Decomposition
Transverse Decomposition Transverse Decomposition
Transverse Decomposition
Transverse Decomposition
…
…
…
…
…
…
Figure 2. Operational mission partition figure of support object system.
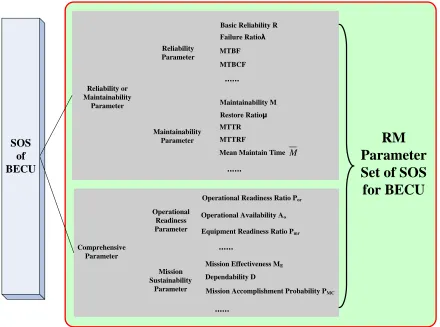
The construction of mission-oriented RM parameter set of SOS should take the RM parameter set of SOS as foundation, and extract parameters from corresponding level SOS RM parameter set according to different mission. For example, the RM parameter set for BECU is shown as Fig. 4. When we construct the mission-oriented RM parameter set for BECU, we should extract parameters from it.
Different phased mission has its own attributes description for operational mission system, such as time requirements, successful criterion, and equipment readiness amount, etc. We should consider these factors in selecting RM parameters.
The phased mission attributes of ECU for SOS are shown as Tab I.
From Tab I, it is obvious that the mission requirements and successful criterion of ECU is comparatively definitive. But we still can not totally describe mission attributes quantificationally. When we
construct the mission-oriented RM parameter set for ECU, we should consider these attributes comprehensively and extract parameters from RM parameter set of SOS for ECU. For example, generally Mission Accomplishment Probability is the most appropriate comprehensive parameter as the mission successful criterion. But in special circumstance, we can also choose a monomial parameter.
The phased mission attributes of BECU for SOS are shown as Tab II.
From Tab II, it can be inferred that the mission requirements and successful criterion of BECU are elaborate. They are described from different aspects, and can be transferred into exercisable quantitative parameters. For example, BECU march 20 Km in 2 hours. So, we can consider comprehensively different factors, such as mission configuration, successful criterion and mission requirements to extract parameters for SOS of BECU. In fact, the parameter extraction of BECU should concern the function system of equipments when it is necessary, in order to choose appropriate parameters. For example, when BECU is marching, the main working part is chassis system of equipments. The key reliability parameter of chassis system is mean mileage between faults. Therefore, we should choose mean mileage between faults as the reliability parameter of BECU. The mission-oriented RM parameter of BECU can be extracted from the RM parameter set of SOS for BECU. According to specific requirements, we can choose comprehensive parameter or monomial parameter.
For SOS of single equipment, its requirements for phased mission are inherited from BECU. We choose the RM parameters of single equipment according to its subordinate BECU. For example, missile does not working during marching mission, so we can choose embarkation dependability as its reliability parameter for this phased mission. But missile works during firing and shooting mission, so we can choose firing dependability and aviation dependability as its reliability parameter. TABLE I.
THE PHASED MISSION ATTRIBUTES OF ECU FOR SOS
Mission serial number 1
Mission Title Marching
Mission Initial Timestamp 2011-08-08 00:00:00
Mission Finishing Timestamp 2011-08-09 00:00:00
Mission Executor ECU
Operational Terrain xxx→xxx
Mission Target
Marching from station to rally region and preparing for battle
Marching Distance 300Km
Whether Key Battle Orientation Yes
Mission Environment
Temperature: 15℃ Humidity: 10%
Objective Mission of Equipment System 1
Objective Mission of ECU 11
Objective Mission of ECU 1a
Objective Mission of BECU 1a...1
Objective Mission of BECU 1a...b
…
…
Phased Mission (1a...1,n1...1)
…
…
Phased Mission (1a...1,n1...p)
Phased Mission (1a...1,nx...1)
…
Phased Mission (1,n)
Phased Mission (1a,n1) Phased Mission (1a,nx)
…
…
Phased Mission (1a...b,n1...1)
Phased Mission (1a...b,nx...1)
…
Phased Mission (11,n1) Phased Mission (11,ny)
Phased Mission (1a...b,n1...q) Para. Set
Para. Set
Para. Set
Para. Set
Para. Set
Para. Set Para. Set
Para. Set Para. Set
Para. Set
Single Equipment 1
Single Equipment k Para. Set
Para. Set Para. Set
Para. Set
Para. Set
Para. Set Para.
Set
Para. Set
Para. Set
Para. Set
… Single
Equip-ment BECU
ECU Para. Set
Para. Set
Para. Set
Parameter Set of SOS
Extract
Mission-Oriented RM Parameter Set of SOS
…
…
…
…
Extract
Extract
Figure 3. Constructing method toward mission-oriented support object system RM parameter.
IV. RM MODEL FOR SOS OF BECU
A. Modeling Analysis
TakingSOS of BECU as a function union, its system state is evident, i.e. if the components of BECU can fulfill the mission requirements according to certain logical relationship during the mission process, then the BECU support object is usable; conversely, once the overall performance of these component dropped to certain degree, the failure of BECU support object will occur, and it becomes unusable. For example, an anti-air cannon battalion can be seemed as a BECU composed of three companies. If the logical relationship between its subordinates is serial, as long as one company is broken, then the entire battalion’s function will be in failure.
These operational SOS characteristics of BECU are basically same to the SOS of single equipment. Therefore, many traditional RM modeling methods can be applied to construct the RM model for SOS of BECU.
B. Modeling Method
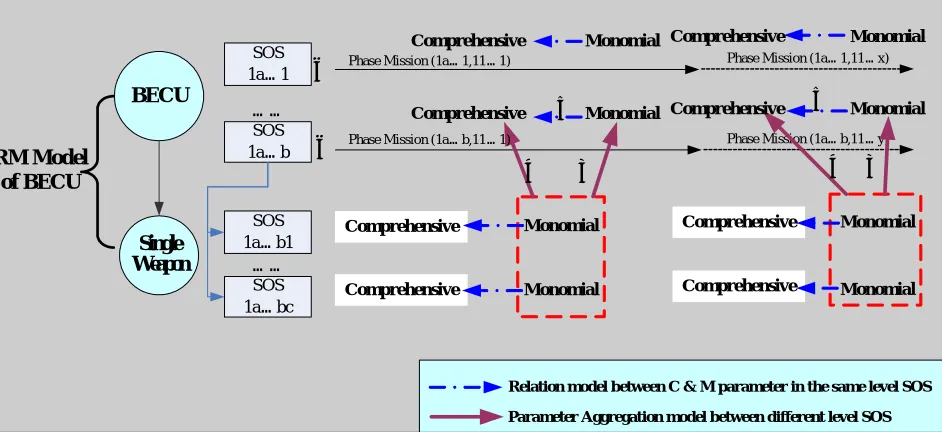
It can be assumed that SOS of BECU is composed of single equipments. Therefore, RM parameters for SOS of BECU should be aggregated from its components, various equipments’ RM parameters. The aggregating process constitutes the RM model of BECU, as Fig. 5 shown:
TABLE II.
THE PHASED MISSION ATTRIBUTES OF BECU FOR SOS
Mission serial number 1
Mission Title Marching
Mission Initial Timestamp 2011-08-08 00:00:00
Mission Finishing Timestamp 2011-08-08 16:00:00
Mission Executor BECU
Operational Terrain xxx→xxx
Mission Target Marching from station to rally
region and preparing for battle
Marching Distance 300Km
Transfer Coefficient 30 Km/h
Equipment Damage Statistics Damage Rate: 0, Light Damage: 0, Medial Damage: 0, Fatal Damage: 0
Equipment Readiness Amount Transportation Auto: 1, Fight Auto: 2, Optical Collimator: 1, Missile: 8
Whether maintainable
during mission Yes
Whether Key
Battle Orientation Yes
Mission Environment
Temperature: 15℃ Humidity: 10%
SOS of BECU
Comprehensive Parameter
Operational Readiness Parameter
Mission Sustainability
Parameter
Operational Readiness Ratio Por
Operational Availability Ao
Equipment Readiness Ratio Pmr
Mission Accomplishment Probability PMC
……
……
RM
Parameter
Set of SOS
for BECU
Reliability or Maintainability
Parameter
Basic Reliability R
MTBF MTBCF Failure Ratioλ Reliability
Parameter
Maintainability Parameter
……
MTTR MTTRF
Mean Maintain Time Restore Ratioµ Maintainability M
……
M
Mission Effectiveness ME Dependability D
Figure 4. RM parameter set for BECU.
As can be seen from the Fig.5, RM modeling for SOS of BECU shoulde be carried out from following aspects: ① in a certain mission phase, monomial parameters for SOS of BECU can be aggregated by monomial parametrs for SOS of single equipment; ② in a certain mission phase, comprehensice parameters for SOS of BECU can be aggregated by monomial parametrs for SOS of single equipment; ③ in a certain mission phase, comprehensice parameters for SOS of BECU can be calculated by monomial parametrs for SOS of themselves; ④ for the complex mission, RM parameter for SOS of BECU can be achieved by synthesizing RM parameters of various mission phases .
For condition ① and ②, we can establish reliability block diagram model or state transition model for SOS of BECU, to achieve RM parameters with analyzing the quantitative relationship between the parameters by mathematical methods. Also we can directly establish the simulation model to achieve RM parameters, such as MTBF MTTR, and dependability, etc.
For condition ③, we can directly construct the relation model between comprehensive and monomial parameters for SOS of BECU, or we can achieve the comprehensive parameter through simulation statistics.
For condition ④, we can establish the PMS model of complex mission according to PMS theory, and calculate RM parameters, such as mission effectiveness and
dependability, using mathematical method. For example, we can mark the dependability of complex mission as Dcm, and mark the dependability of various mission
phases as Dp1, Dp2,…Dpn. Then, the dependability can be
calculated according to equation 1. At the same time, we also can achieve the RM parameters through simulation statistics. Thus, we can build a group of RM model for any complex mission and each phase mission for SOS of BECU.
pn pi
p p
cm D D D D
D = 1× 2×… ×… (1)
C. RM Parameter Model of Phase Mission
Support object of BECU can be marked as U. Phase mission of U can be markedas Ti.
In Ti, equipments involved in mission can be marked
respectively as E1, E2, …, Ej, …, En.
In Ti, time requirements of mission can be marked as
Tio. Mission requirements can be marked as Tiw. Maintain
strategy can be marked as MCL(Ti).
In Ti, related parameters of reliability can be marked
as RU(Ti). Related parameters of maintainability can be marked as GU(Ti). Comprehensive parameters can be marked uniformly as ZHU(Ti). Related parameters of reliability for Ej can be marked as REj(Ti). Related parameters of maintainability for Ej can be marked as
Single Weapon BECU
SOS 1a…b1
SOS 1a…bc
… …
SOS 1a…1
SOS 1a…b
… …
Phase Mission (1a…1,11…1) Phase Mission (1a…1,11…x)
Phase Mission (1a…b,11…y)
Comprehensive
Comprehensive Monomial
RM Model of BECU
Relation model between C & M parameter in the same level SOS
Parameter Aggregation model between different level SOS
③
① ② ④
① ② ③ ④
Phase Mission (1a…b,11…1)
Comprehensive Monomial
Comprehensive Monomial
Comprehensive Monomial
Monomial
Monomial Comprehensive
Comprehensive
Comprehensive
Monomial
Monomial
Figure 5. RM modeling method toward SOS for BECU.
Now we present the comprehensive and monomial RM parameter model of phase mission Ti for U.
1) Monomial Parameter Model
The monomial parameter model for SOS of BECU includes reliability parameter model and maintainability parameter model. According to the analysis of the modeling method ① in Fig. 5, the reliability parameter model can be described as equation 2:
(
)
(i) , , j(i) 1 , j(i) 1 , (i)
U T R io iw E T j n E T j n CL T
R = f T T R = → G = → M (2)
Among them, ( ) 1
j i
E T j n
R = → and
( ) 1
j i
E T j n
G = → signify the reliability and maintainability parameters of each equipment Ej involved in mission. fR(.)signifies the
relationship between the monomial parameter of single equipment and BECU support object. In fact, according to different reliability parameters, such as R(t)U(T i),
Rm(t)U(T i), f(t)U(T i), fm(t)U(T i), MTBFU(T i),
MTBCFU(T i) , and N( 0→t)U(T i) etc, fR( . ) are different.
According to the complexity and different characteristics of system, fR( . ) can be achieved through not only
mathematical methods, but also simulation methods. The maintainability parameter model can be described as equation 3:
(
)
(i) , , j(i) 1 , j(i) 1 , (i)
U T G io iw E T j n E T j n CL T
G = f T T R = → G = → M (3)
Similarly, fG(.)is also different, according to the
different maintainability parameters, such as G(t)U(Ti),
Gm(t)U(Ti), g(t)U(Ti), gm(t)U(Ti), MTTRU(Ti) and MTTRFU(Ti), etc. fG(.)can be achieved through both mathematical and
simulation methods.
2) Comprehensive Parameter Model
According to the analysis of the modeling method ② in Fig. 5, the comprehensive parameter model can be described as equation 4:
(
)
(i) , , j(i) 1 , j(i) 1 , (i)
U T ZH io iw E T j n E T j n CL T
ZH = f T T R = → G = → M (4)
Among them, ZHU(Ti) signifies any RM comprehensive parameters.
fZH(.) is different according to the different
comprehensive parameters,such as Por{U(Ti)}, Ao{U(Ti)},
PMC{U(Ti)}, Em{U(Ti)} and D{U(Ti)}, etc. Similarly, fZH(.) can
be achieved through mathematical and simulation methods. For example, the availability can be calculated by Markov process, and the dependability can be achieved by simulation statistics.
Additional, according to the analysis of the modeling method ③ in Fig. 5, the comprehensive parameter model also can be described as equation 5:
(
)
'
( )i ZH , , ( )i , ( )i
U T io iw U T U T
ZH = f T T R G (5)
V. CONCLUSIONS
With the development of weaponry equipment, many traditional RM modeling theories and methods for single equipment are not applied to higher level combat unit. Aiming at the smallest operational unit, basic equipment combat unit, this paper constructs its reliability and maintainability model with establishing the parameter system precedently. The emphasis of modeling is choosing appropriate RM parameters to reflect the characteristics of BECU. We will utilize this RM model to solve the operational-mission oriented support resource deployment and support efficiency evaluation problems in our further research.
ACKNOWLEDGMENT
REFERENCES
[1] Nie Chenglong, Research on Integrated Logistics Support Model Orient with Combat Unit, Shijiazhuang, 2004, pp. 12.
[2] ARINC Research Corporation, “Product Reliability,
Maintainability, and Supportability,” Edited by MICHEAL Pecht, Boca Raton: CRC press, 1995.
[3] Zhou Ji, Liang Sheng-ji, Zhang Keke. “Research of
Reliability Evaluating Method in Weaponry Equipment Based Bayes Theory”, Ship Science and Technology, vo1. 32, No.3 , 2010, pp.118-120,
[4] Allied Reliability and Maintainability Publication, ARMP-4. Guidance for Writing NATO R&M Requirements Documents, June 2003.
[5] Lian Xuehui, Meng Qingpeng, “A Study on Basic
Reliability Evaluation Method for Modified Electronic Equipment”, Modem Radar, vo1. 3, 1 No.8, 2009, pp.25-28.
[6] Zhang Weijin, Kang Rui, Guo Linhan, “Study on Military Equipment Support Modeling and Simulation”. Journal of Chinese Aeronautics, vol. 18, No.2, 2005, pp.142-146. [7] Chen Xiuxue, Zhao Jianzhong, “Determining Methods of
Spare Sort in Missile Equipment”, Aero Weaponry, No.2 , 2009, pp.57-60.
[8] Harold S Balaban, Robert T Brigantic, Samuel A Wright, “A Simulation Approach to Estimating Aircarft Mission Capable Rates for the United State Air Force”,
Proceedings of the 2000 Winter Simulation Conference, IEEE, USA Orlando, 2000, pp.1035-1042.
[9] Huang Jianxin, Bian Yaqin, Zhang Shengtao, Zhou Lin, “The Evaluation of the Performance Reliability of New
Type Radar Equipment System”, Journal of Air Force
Engineering University (Natural Science Edition), vo1. 9, No.5, 2008, pp. 57-60.
[10]Gan Chuanfu, Lin Gan, Niu Zhongxing, Peng Liying,
“Study on Method to Developing Reliability, Maintainability and FMECA in Large Equipment”,
Modern Radar, vol. 30, No. 7, 2008, pp. 33-35.
[11]Ministry of Defence, “Reliability and Maintainablity Part1 Management Responsibilities and Requirements for Programmes and Plans”, Defence Standard 00-41, June 2008.
[12]Yu Yongli, Kang Rui, “Basic Theory and Technological Framework of Equipment Integrated Logistics Support”,
Reliability Engineering, vol. 6, No. 2, 2008, pp. 49-53.
Le Chen was born in Hebei, China,
in 1979. He received his PhD degree from Ordnance Engineering College, Shijiazhuang, China. He is now a teacher in the Department of Equipment Command, Academy of Equipment Command & Technology, Beijing, China. His research interests include integrated logistics support and equipment maintenance support. Dr. Chen has numerous research publications that have appeared in IEEE Transactions on Systems, Circuits and systems, Industrial Electronics Society, and others. He has written several book chapters and has more than 10 research presentations and articles presented at major conferences.
Hongmin Yu was born in Shandong, China, in 1963. He
received his PhD degreefrom Ordnance Engineering College, Shijiazhuang, China. He is now a professor in the Department of Equipment Command, Academy of Equipment Command & Technology, Beijing, China. Dr. Yu has about 30 years of education working experience. His research interests include equipment management and equipment maintenance support.
Zhengping Shu was born in Heilongjiang, China, in 1960.
He received his PhD degree from Academy of Equipment
Command & Technology, Beijing, China. He is now a professor in the Department of Equipment Command, Academy of Equipment Command & Technology, Beijing, China. Dr. Shu is a fellow of China Ordnance Society. His major field of study mainly include equipment maintenance support.