R E S E A R C H P A P E R
Open Access
Efficient video collection association
using geometry-aware Bag-of-Iconics
representations
Ke Wang
1*, Enrique Dunn
2, Mikel Rodriguez
3and Jan-Michael Frahm
1Abstract
Recent years have witnessed the dramatic evolution in visual data volume and processing capabilities. For example, technical advances have enabled 3D modeling from large-scale crowdsourced photo collections. Compared to static image datasets, exploration and exploitation of Internet video collections are still largely unsolved. To address this challenge, we first propose to represent video contents using a histogram representation of iconic imagery attained from relevant visual datasets. We then develop a data-driven framework for a fully unsupervised extraction of such representations. Our novelBag-of-Iconics(BoI) representation efficiently analyzes individual videos within a large-scale video collection. We demonstrate our proposed BoI representation with two novel applications: (1) finding video sequences connecting adjacent landmarks and aligning reconstructed 3D models and (2) retrieving geometrically relevant clips from video collections. Results on crowdsourced datasets illustrate the efficiency and effectiveness of our proposed Bag-of-Iconics representation.
Keywords: Video collection, Video representation, Video retrieval, 3D reconstruction
1 Introduction
Taking photos and video clips has never been easier. One can record videos at high frame rates (e.g., 240 fps are available on the iPhone), in high resolution (4K reso-lution available on GoPros), or even in 360° [1]. Such technical convenience yields a sheer amount of user-generated visual data being shared over the Internet. For example, over 400 h of videos are uploaded to YouTube every minute [2]. Accordingly, such a huge amount of visual data poses great challenges on storing, analyzing, indexing, and searching these unstructured photo/video collections. To unleash the wealth of information embed-ded within the ever expanding corpora of visual media, we need efficient and effective content-based data asso-ciation algorithms for large-scale unordered photo/video collections.
Developing technologies for large-scale visual data col-lections is at the core of computer vision research. Today,
*Correspondence: [email protected]
1Department of Computer Science, UNC Chapel Hill, 201 S Columbia Street,
Chapel Hill 27599, USA
Full list of author information is available at the end of the article
state-of-the-art methods can process static Internet photo collections for different vision tasks. For example, 3D modeling methods have striven to handle large datasets [3–6], as well as improving model robustness and com-pleteness [7]; modern visual recognition systems can build rich feature hierarchies from large annotated image datasets [8] and perform complicated recognition tasks like image classification [9], object detection [10], and semantic segmentation [11].
Compared to photo collections, the current scope of video analysis mostly focuses on the per-sequence level analysis, with examples of video summarization [12] and action recognition [13]. Discovering inter-sequence rela-tionships among collections of videos is still a largely unaddressed problem.
To tackle such challenge, we propose a novel algorithm that first summarizes common visual elements/entities within the internet video collections as “iconics.” Iconic images, as used in Frahm et al. [6] and Heinly et al. [7], provide a compact yet informative summarization of the common visual elements occurring within a visual dataset. By representing videos as a histogram of iconic occurrences, we can develop efficient algorithms
to discover inter-sequence relationships within a video collection. In this paper, we apply the proposed Bag-of-Iconic video representation for novel video analysis applications: in addition to the 3D model alignment task as in our earlier work [14], we demonstrate the usefulness of the Bag-of-Iconic video representation with a novel geometry-aware video retrieval task.
Our major innovations include:
1. A globalBag-of-Iconics video representation for collection level video content analysis;
2. A fully automatic and unsupervised framework to find iconic images and build the BoI video representations;
3. Application of the BoI video representation to discover observational connectivities among known 3D landmark models for model alignment;
4. Employing the BoI video representation for geometry-aware video retrieval.
Our paper is organized as follows: Section 2 reviews relevant related works. Section 3 introduces our pro-posed video representation and explains how to establish it. Section 4 demonstrates how to use the video repre-sentation to further enhance model completeness from Internet 3D reconstructions. Section 5 shows geometry-aware video retrieval using the proposed representation. Section 6 concludes our paper.
2 Related work
Large-scale crowdsourced visual data collections have long driven the development of computer vision research. The scope of research covering large-scale visual datasets is broad. In this paper, we mainly focus on discovering inter-sequence relationships within unordered video col-lections. Thus, we only review relevant solutions to our problem.
2.1 Photo collections
3D modeling first needs to establish pairwise epipo-lar geometry relationships within photo collections, thus provides a good example for mining inter-element con-nections within unordered visual datasets. Large-scale structure-from-motion systems started with datasets of a few thousand images [3, 4]. Using image retrieval tech-niques for overlap prediction, Agarwal et al. [5] processed 150 thousand images in a single day on a computer clus-ter. Frahm et al. [6] reconstructed 3 million images in one day on a single computer utilizing a compact binary image representation for clustering. Recently, Heinly et al. [7] pushed the envelope to tackle a world-scale dataset (100 million images) by using a streaming paradigm to identify connected images by looking at each image only once.
One of the core computational challenges and the key to improved scalability for large-scale structure-from-motion systems is the efficient mining for element connectivities within photo collections. Li et al. [15] introduced the con-cept of iconic imagesto model the relationship between different image clusters via iconic scene graphs. Frahm et al. [6] and Heinly et al. [7] further utilized the iconic representation for better scalability. Similarly, our method extends the concept of iconic images to represent visual video contents.
Compared to photo collections, video datasets can con-tain a much larger number of frames even for small col-lections. For example, our experiments are conducted on two video collections with more frames than the largest photo collection in [7]. Methods designed for photo collections do not consider the video temporal redun-dancy, thus cannot scale to video collection problems easily.
2.2 Video collections
As a dual concept to unstructured photo datasets, unordered Internet video collections also exhibit spar-sity and lack of structures in the dataset. Tompkin et al. [16] proposed to identify common scenes as “portals” to explore the structure and relationship within a video collection. Using such “portals” as nodes, a connectivity graph can be built from a video collection for interac-tive visualization and exploration. Our work also identifies common scene elements (“iconics”), but we aim at using a fully unsupervised approach to creating Bag-of-Iconic video representations, which can enable more interesting applications.
2.3 Video summarization
Compared to photo collections, the additional temporal domain in video data, not only provides more informa-tion than static images but also brings high redundancy. Selecting informative frames/segments from the videos is essential to achieve high scalability and throughput for real-world large-scale applications. Motion information is a common cue for keyframe selection [17] in video processing. Ahmed et al. [18] explicitly consider epipo-lar geometry when selecting keyframes for 3D modeling. Compared to keyframe selection, video summarization aims to find the most meaningful/interesting video seg-ments, which can help users to skim long video sequences. Ajmal et al. [19] gives an anatomy of video summariza-tion methods, we refer interested readers to [19] for more details.
2.4 Video retrieval
of content-based video retrieval. In this paper, we pro-pose the concept of “geometry-aware” video retrieval: i.e., finding videos that have the same background/entities for a given query video. Such rigid geometric constraints are hard to fulfill by existing video indexing schemes, while our proposed Bag-of-Iconics representation provides a direct solution.
Considering the large volume of the video collections, high-dimensional feature representations can be slow to search/retrieve. Binary hashing [21] together with Ham-ming space indexing and searching [22] provides a com-putationally efficient way to scale-up to the size of video databases.
2.5 Camera trajectories
To align separate 3D models into a joint model, we need a camera trajectory that links multiple 3D models. Visual odometry [23] provides a solution of reconstructing such camera trajectories from visual data. Different from visual odometry techniques, Zheng et al. [24] jointly estimates the topology of the objects motion path and reconstructs the 3D object points for dynamic objects in a static scene. In contrast, our work needs to recover the camera motion trajectory to align 3D models and is focused on identifying relevant video (sub)-sequences from a large video collec-tion rather than obtaining the camera mocollec-tion trajectories.
3 Bag-of-Iconic representation
To build the proposed Bag-of-Iconic representation for videos, we first need to distill the temporal redundancy in the videos by selecting only keyframes (Section 3.1). Visu-ally similar keyframes are then grouped together and each keyframe cluster represents some commonly captured visual entities or structures. Aniconicimage is selected to represent each keyframe cluster (Section 3.2). The set of representing iconic images, when viewed in aggregation, forms a “visual codebook” describing the captured visual contents. At individual video sequence level, it encodes how frequently each visual element occurs in a video, and it characterizes and summarizes the video’s content. To utilize the visual codebook, we perform geometric verifi-cation between the video keyframes and the iconic images to accumulate the histogram of iconic image occurrences (Section 3.3).
3.1 Video keyframe selection
Different from images, the additional temporal domain in videos brings more visual information at the cost of high redundancy and enormous data volumes. Selecting only keyframes from the raw video streams achieves a balance between keeping visual information and lowering com-putational overhead. To this end, we divide each video v=f|f ∈vinto small non-overlapping segmentsvs⊆v where each segment is represented by one keyframekf ∈ vs⊆v.
vsi∩vsj= ∅, ∀i,j,i=j (1)
Ideally, different keyframes should represent distinct visual elements. The keyframe extraction process must take geometric information into consideration. In addition, the high volume of video collections requires the keyframe selection algorithm to be com-putationally efficient. With such goals in mind, we choose a GPU-accelerated KLT tracker [25] to select keyframes.
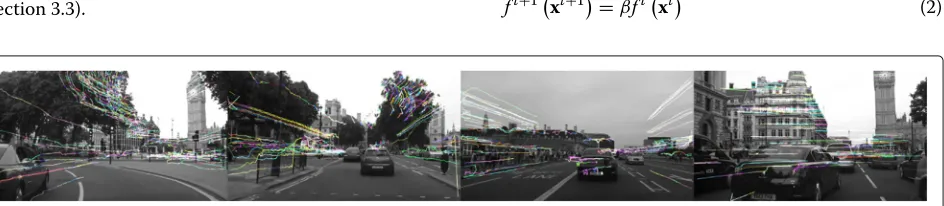
For a new videov, we start processing the first video seg-ment from the beginning and we select the first frame as the first keyframekf1. Shi-Tomasi’s corner pointsx1[26]
are detected within kf1. At any given timestamp t +1, we keep track of the previous frame ft and the previ-ous keypoints xt. The KLT tracker then computes the tracked feature points xt+1 for the current frame ft+1. If the ratio of tracked feature points xt+1 over the cur-rent keyframe feature pointsxifalls below the pre-defined
threshold of |xt+1|/|xi| < 20%, the current frame ft+1
is selected as the new keyframe for the new video seg-ment. Shi-Tomasi’s corner points are then re-detected for the new keyframekfi+1and KLT tacker is re-initialized. Please refer to Fig. 1 for examples of selected video keyframes.
We add the following processing to increase the robust-ness of the KLT tracker: (a) To compensate for the cam-era exposure changes, we estimate a global gain ratioβ between successive frames ft and ft+1 [27]. Given cor-responding pixels xt and xt+1 in the frame pair, pixel intensities are related by the multiplicative camera gain model:
ft+1xt+1=βftxt (2)
(b) In crowdsourced video collections, watermarks on border regions of video frames can lead to constantly tracked feature points. Such consistent feature tracks do not help to distinguish the actual visual content between frames. We discard the detection and tracking in video border regions to suppress watermarks. (c) We apply addi-tional forward and backward tracking consistency checks to remove bogus feature tracks.
3.2 Codebook extraction
Similar to large-scale structure-from-motion systems, we enforce a strict epipolar geometry relationship (funda-mental matrix or essential matrix [28]) when grouping keyframes together. However, pairwise geometric verifi-cation is computationally infeasible for large keyframe collections. Inspired by Heinly et al. [7], we adopted a streaming clustering approach.
Each image cluster has a representing iconic image. SIFT features [29] of all belonging images within the cluster are grouped into a Bag-of-Visual-Word (BoVW) vector. Such augmented BoVW vector is used as the fea-ture representation of the iconic images. Iconic images are indexed in a vocabulary tree [30] for fast retrieval. For each new imageI, a small set of iconic images (2 in our case) is retrieved using vocabulary trees. Geometric verifi-cation is performed between the unseen imageIand every retrieved iconic image. Based on the registration results, different actions are taken: (1) if the new imageIfails to register to any retrieved iconic images, it will form its own new cluster with itself being the iconic image; (2) ifI reg-isters to multiple iconic images, the registered clusters are merged together as a connected component; and (3) if the new image registers to only one iconic image, imageIis added to that cluster.
The first image for each image cluster is chosen as the initial iconic image. Then for each image cluster, the iconic images are updated when different clusters merge
together or the size increase of the cluster exceeds a cer-tain threshold. The image that concer-tains the most visual words is selected as the new iconic image in that cluster.
Such process, although with great scalability and throughput, has two issues for extracting compact code-books. First of all, Heinly et al. [7] constrain the resource consumption by discarding slowly growing image clusters. Depending on the processing ordering of images, such early-stopping strategy can leave similar images in disjoint clusters. Since we treat each iconic image as one entry in the codebook, different codebook elements represent-ing the same visual content can cause ambiguity for later processing. In addition, the total number of discovered image clusters is theoretically unbounded. This causes lit-tle practical trouble for the 3D reconstruction problems in Heinly et al. [7], but high dimensionality of the code-book can significantly threaten the efficiency of storing, indexing, and searching large video datasets.
To address such issues, we run a second pass of the clus-tering algorithm on the keyframe collection to regularize the extracted codebook. Keyframes are randomly shuf-fled into different orders before the second pass streaming process. By processing the images one more time in dif-ferent order, separated image clusters due to ordering and discarding reasons can be agglomerated together. Fur-thermore, image clusters with less than 200 entries are removed from the codebook to reduce the codebook car-dinality. Iconic images from all discovered image clusters after the second streaming pass will form the codebook
C= {ic0,ic1,. . .,icm}together. Examples of iconic images
and corresponding image clusters are shown in Fig. 2.
3.3 Video representation extraction
Having extracted keyframes from videos and built code-bookC, by generalizing the Bag-of-Visual-Words concept we can build a global descriptor H(v) for each video v. Video keyframes are assigned to high-level “words” in
the codebook (iconic images). TF-IDF (term frequency-inverse document frequency) weighted numbers of occur-rence of each iconic view ic ∈ C are then accumulated into a histogram, which is our proposed video descriptor H(v) = [h(0),h(1),. . .,h(m)]. Strictly speaking, occur-rence means a valid geometric registration exists between an iconic imageicand a given keyframekf.
h(i)=WTFIDF ⎛
⎝
kf∈v
GV(kf,ici) ⎞
⎠,ici∈C. (3)
where GV(kf,ic) is an indicator function that returns 1 upon successful geometric verification between keyframe kf and iconic image ic, and 0 otherwise. WTFIDF() is the term frequency-inverse document
frequency weighting function w.r.t. elements in the iconic codebook C. Weighted histogram H(v) are then normalized to unit length. Compared to using the L2
normalization scheme alone in Wang et al. [14], adding the TF-IDF weight scheme can better adjust to the bias that some visual elements appear more frequently in general.
Considering the potentially large number of iconic images, to make the video representation extraction pro-cess practical, we only perform geometric verification for each keyframe kf with only the two most simi-lar iconic images retrieved using the indexed vocab-ulary tree, similar to the codebook extraction process (Section 3.2),
The similarity between the visual content of two videos vi and vj can be computed as the sum of intersections
between their histogram representationsH(vi)andH(vj):
SH(vi),H(vj)
=
m
k=0
minhi(k),hj(k)
, (4)
4 3D model connection
Recent advances in large-scale structure-from-motion have striven to handle larger photo collections [5, 6], while improving model robustness and completeness [7]. However, existing methods usually generate 3D models restricted to individual landmarks. We notice two data deficiencies issues that lead to this lack of geospatial connectivity of the 3D models attained from photo col-lections. Firstly, crowdsourced photos tend to be highly redundant. The viewing directions also tend to converge to a given landmark’s most salient regions. Secondly, sam-pling density erodes towards the model’s periphery. Such sampling deficiencies lead to much fewer images in the photo collection depicting scenes in-between landmarks of interest. In addition, state-of-the-art structure from motion systems do not use exhaustive pairwise matching for large-scale datasets. Under-sampled connectivities are more likely to be discarded during the 3D reconstruction process [31].
Auxiliary data sources, like videos, are thus necessary to overcome the data deficiency in photo collections and to obtain more complete models. Intuitively, many sight-seeing videos captured with wearable cameras or
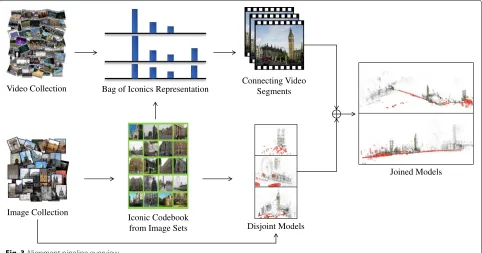
Joined Models Video Collection Bag of Iconics Representation Connecting Video Segments
Iconic Codebook from Image Sets Image Collection
Disjoint Models
a
b
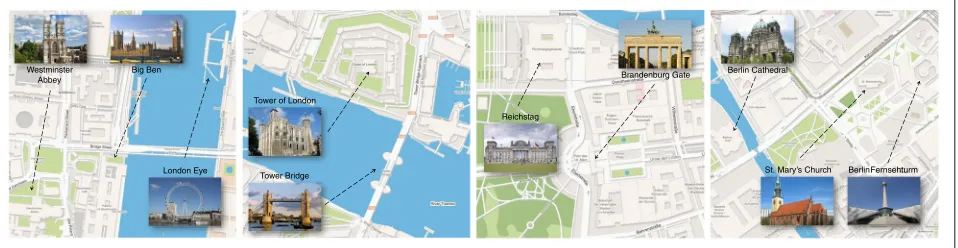
Fig. 4Clustering results on Videoscapes video dataset (see Section 4.4) Codebook is extracted on the London Flickr image collection (see Section 4.4). Different video clusters are shown in different colors.aGround-truth GPS locations.bVideo clusters
mobile phones, directly record such missing connectivity information between landmarks, e.g., GoPros worn by the user that continuously capture video. Such geospatially connecting video sequences can be used to join separate 3D models by aligning them to the common camera trajectories. Here, we propose to use our Bag-of-Iconic video representation to efficiently identify such video liaisons from a video collection. An overview can be found in Fig. 3.
Crowdsourced video and image collections can differ greatly in their visual content. Common visual elements
(scenes, structures, objects, be identified to bridge this gap. We use [7] to obtain 3D models from photo collections. The streaming clustering process naturally provides us with a set of “iconic” images, which we can use as the codebook C. We propose to uncover the hidden visual connections by reusing the photo col-lection iconics to represent video contents. Frequent co-occurrences of different visual elements in video sequences strongly indicate the possible connections between different landmarks. Such co-occurrence rela-tionships are efficiently uncovered via clustering over
London Eye Westminster
Abbey
Big Ben
Tower of London
Tower Bridge
Reichstag
Brandenburg Gate Berlin Cathedral
Berlin Fernsehturm St. Mary’s Church
Table 1Statistics on crowdsourced image and video collections (Section 4.4)
Dataset Number of images Processing time (h)
Registered Iconics Total Stream Densify SfM Total
Berlin Flickr 865,699 37,544 2,661,327 18.46 1.89 5.57 25.92
London Flickr 3,716,916 103,290 12,036,991 90.75 7.09 33.83 131.67
Videos Length (h) Frames Keyframes Registered Clusters
London YouTube 19,217 2,195.96 245,586,526 5,648,490 734,303 4,937
Berlin YouTube 17,480 2,068.41 223,388,274 4,244,377 636,689 4,135
Iconics are for clusters of size≥200 (Section 3.2). SfM timings are reported on components with≥400 images. Video clusters with more than 50 videos are reported. Reported numbers are based on two passes of the dataset
the Bag-of-Iconics representation (Section 4.1). Finally, we pick smoothly transitioning video sub-sequences (Section 4.2) to align separately reconstructed 3D models together (Section 4.3).
4.1 Video representation clustering
Given a collection of 3D models, we need to first identify from video data which of those models are geospatially adjacent. Following the intuition that spatially nearby landmarks appear more often with each other, we cluster the video BoI histograms to uncover the frequently co-occurring iconics. Videos covering the same set of iconics will have a higher similarity score (Eq. 4). If such small groups of geospatially nearby landmarks exist, the video BoI representation should be close to each other within the BoI space. We adopted the mean shift clustering algo-rithm [32] to identify such landmark groups. An empirical value of 0.1 is used as the clustering bandwidthd. The histogram intersection kernel (Eq. 4) is used as the weight-ing function. As shown in Fig. 4, clusterweight-ing videos in the BoI space can successfully group them by geospatial proximity.
Geospatially adjacent landmarks can then be identi-fied from the clustered video histograms as common high peaks in the histogram representations (Fig. 5). To suppress noise, we compute the average histogramH˜ of the descriptor clusterH= {H(v1),. . .,H(vl)}as:
˜
H=
˜
h(0),h˜(1),. . .,h˜(m)
,h˜(i)=
H∈HhH(i)
|H| . (5)
The underlying landmark group corresponds to a min-imal subset of histogram bins{c|c ∈ CH ⊆ C}that sum
up to a pre-defined thresholdc∈C
Hh˜(c) ≥ τ. Without loss of generality, we sort the bins of the average histogram
˜
H into descending order H, where h(0) ≥ h(1) ≥ · · · ≥ h(m). Then we can select the minimal subset of binsCH = {0, 1,. . .,S}such thatSi=0h(i) ≥ τ, where τ =0.70.
4.2 Optimal video sequence selection
To align disjoint reconstructed 3D models together, smooth and continuous camera motion trajectories are preferred. The BoI histogram representation does not contain temporal information, thus we need to inspect the videos again to pick suitable video sequences.
Given a group of adjacent landmarks CH and the
corresponding set of videos {vH|H ∈ H}, we first
need to filter out invalid video sequences vH that
can-not connect the separately reconstructed 3D models. A valid video path is a set of consecutive video seg-ments Path(v) = {vsi,vsi+1,vsi+2,. . .,vsi+k} where the
keyframes (kfiandkfi+k, respectively) of the ending video segments (vsi andvsi+k, respectively) have valid
registra-tions with respect to the landmark iconic image setCH. We loosen the registration constraints on the in-between video segments vsi+1,. . .,vsi+k−1 because of the photo
collection data sampling density decrease towards the periphery of landmark models.
To reconstruct the camera motion trajectory Path(v)of the videov, we uniformly re-sample the video sequence Path(v) and obtain a frame sequence F. A good frame sequence F(Path(v)) =[f0,f1,. . .,fM] should exhibit
smoothness in camera motion without abrupt motion or motion discontinuities. To pick better frame sequences,
Table 2Processing time (in hours) of each stage of our proposed 3D model alignment algorithm
Dataset Keyframe Histogram Clustering Scoring SfM Merging Total
London YouTube 227.34 11.73 6.10 132.17 4.37 2.25 383.96
Berlin YouTube 206.84 9.12 5.37 146.84 3.10 1.12 372.39
we use the geometric mean of the inlier ratio of the tracked features between every consecutive frame pair in the sequenceFas the smoothing score forF:
Score(F)= M+1
M
i=1
T(fi−1,fi), (6)
where T(fi1,fi) is the ratio of tracked features between frame fi−1 and frame fi, computed by the bi-directional
KLT tracker as in Section 3.1. The KLT tracker is re-initialized for at framefifor each frame pair(fi,fi+1).
4.3 Model reconstruction and merging
Having obtained the frame sequenceFand the 3D mod-els, a simple solution to align the 3D models together is to run structure from motion on all the registered images belonging to 3D models and the frame sequence F together. Such direct approach is computationally too heavy, especially for larger models. Instead, we propose a significantly more efficient approach: we first recon-struct the camera motion trajectory from selected video sequences alone, and then align the 3D models to the camera trajectory model.
Colmap [33] is used to obtain the 3D model V from the video frame sequenceF(Section 4.2). Landmark 3D
a
b
modelsL0,L1,. . .,Lnfrom photo collections are obtained
as in Heinly et al. [7]. To align a landmark 3D model Li to the camera motion trajectory V, we need to
esti-mate a similarity transformation: a rotationR ∈ R3×3, a translationt∈R3, and a scaling factors∈R.
The key to obtaining the similarity transformation lies in the fact that frames within the camera frame sequence Fcan register to both the camera trajectory modelVand the landmark modelLi. Given a video frame f, letRLi,tLi
be its rotation and translation of video framefiw.r.t.
land-mark modelL, andRVi ,tiV be its rotation and translation against video trajectory modelV. The desired similarity transformation aligning the modelLto the video camera trajectory modelVcan be calculated as:
R=RVi T·RLi,s=
cVi −cVj
2
cLi −cLj
2
,t=cVi −sRcLi. (7)
where c ∈ R3 is the camera location. Transformations obtained from multiple video frames are averaged and further optimized by bundle adjustment [34].
4.4 Datasets and setup
We demonstrated the effectiveness of our proposed model alignment on multiple crowdsourced datasets. Two unordered Internet photo collections from Flickr covering London and Berlin are obtained from the authors of [6] (see Table 1 for the dataset statistics). Two crowdsourced video collections and one manually collected video collec-tion are then used to separately align the disjoint models. Two Internet video collections (covering London and Berlin respectively) are obtained from YouTube by text and geo-location-based queries within the “travel” and “events” video subcategory s. The crowdsourced video collections contain great variances in video resolutions, frame rates, bit rates, etc. We limit the maximum reso-lution of download for YouTube videos to be 1080P for efficient storage and processing. The Videoscapes dataset [16] is a manually collected video dataset, covering major landmarks in London with ground-truth GPS trajectories. We implemented the proposed pipeline in C++ & Python. A single computer with 192 GB memory, a 32-core 2 GHz Intel Xeon CPU, and three nVidia Tesla K20c GPUs, is used for our experimental evaluations. Detailed
timings can be found in Tables 1 and 2, respectively. To the best of our knowledge, processing such large-scale hybrid visual datasets on a single computer in a few days is unprecedented.
4.5 Inter-model alignment results
Registration can only be achieved on 15% videos of the Berlin video dataset and 13% videos of the London video dataset. While [7] registered 26% images on Berlin image dataset and 25% on London image dataset, the differ-ent characteristics of the video dataset are the main reason for lower registration rate on video collections. We borrowed the iconic codebook from the image dataset to search for video segments connecting landmarks. Con-sidering the vast differences between photo and video datasets, the visual content of videos cannot be fully summarized by the iconic codebook from photo collec-tions. Lower registration rate on video collections actually reveals the fact that by using the photo collection code-book, only relevant video contents are considered for our model alignment problem.
Our proposed pipeline has smaller throughput com-pared to state-of-the-art [7] (Table 1) because (1) we iterate the dataset for an additional pass; and (2) we have inferior computation capability with our hardware platform compared to [7].
Qualitative results are presented in Figs. 11 and 12. All results in London are reported on the crowdsourced YouTube video dataset. We then utilize geo-registered streetview (SV) images for a quantitative evaluation (Fig. 6). Although many crowdsourced images contain geo-tags, we did not utilize such information for regis-tration in our algorithms. In addition, streetview images have higher GPS accuracy [35]. Google streetview images are stored as equirectangular panoramas. We re-sampled perspective images from 12 uniformly distributed viewing angles of each panorama. The obtained perspective views are then registered to the 3D SfM models (from Section 4.3) to get ground-truth inter-model transformations.
For quantitative evaluation, the coordinate system of one 3D landmark model is used as the reference coordi-nate system. The similarity transformations (rotation R, translationt, and scalings) of other landmark models with
Table 3Quantitative evaluations of model alignment. Euclidean distance in meters are reported for positional errors
Evaluated model London eye Westminster Abbey Tower of London Brandenburg gate
Average
Reference model Big Ben Big Ben Tower Bridge Reichastag
Orientation error (°) 6.94 5.46 4.38 8.34 6.28
Position error (m) 1.71 0.96 3.15 2.76 2.15
Scaling error (%) 3.42 4.67 9.19 2.47 4.94
Table 4Comparison of different keyframe extraction algorithms. Experiments are performed on the Videoscape dataset 4.4
Method Speed (Hz) Keyframes Iconics Clustering time (min)
Intensity 1057.2 2784 759 9.8
Tracking 301.8 1298 622 6.6
[18] 15.76 962 619 6.1
respect to the reference model is computed as Eq. (7). As shown in Table 3, our proposed method successfully discovered the geospatial relationships from the video col-lections and produced accurate spatial transformations to align separate 3D landmark models.
4.6 Discussions
4.6.1 Keyframe selection
As seen in Table 2, keyframe extraction takes the major-ity of the video processing time. But the qualmajor-ity of selected video keyframes is critical for extracting meaningful BoI representations and controlling the keyframe collection sizes.
Notice in Table 1 that the total number of raw frames exceeds even the 100 million images dataset in [7]. To make the entire pipeline feasible with limited computa-tional resources, it is necessary to reduce redundant video data to distinctive and representative keyframes. Though keyframe extraction is taking a majority of the processing time, without it later stages would suffer from intractably high volumes of data.
To further justify our choice of KLT tracking, we compare our GPU-based KLT tracker with two differ-ent keyframe selection strategies. One is a fast frame intensity based keyframe selection algorithm: where each frame is represented as the concatenation of the inte-grated row and column pixel intensities; frame vectors are normalized to unit length; subsequent frame vector is compared against the previous keyframe vector, when-ever significant changes are detected (Euclidean distance larger than 0.2) the current subsequent frame is selected as a new keyframe. The other method [18] explicitly eval-uates frame-to-frame point correspondence sets as well as frame-to-frame epipolar geometries (homography and
fundamental matrix), thus avoiding motion and struc-ture degeneracy to select more robust keyframes for 3D reconstruction purposes.
As can be seen in Table 4, the appearance based keyframe extraction algorithm is much faster, but it produced significantly more keyframes and thus greatly burdens the later clustering stage. The more expen-sive keyframe selection method [18] generated fewer keyframes but a similar number of iconics, which means it summarized the visual dataset with fewer iconic images. However, the superiority of its keyframe quality cannot compensate for its huge computation overhead when seen in the context of the overall method.
4.6.2 Histogram clustering
Our proposed method can successfully discover the geospatial relationships from video collections and align the corresponding 3D landmark models, as shown in Figs. 11 and 12. However, our method empirically finds small groups of landmarks. We contribute this to the following reasons:
1. Many video clusters have a single major peak. Single mode descriptors correspond to videos that describe a single landmark. Such video clusters do not bring extra information for model alignment tasks. 2. The smaller bandwidth parameterd used in the
mean shift clustering algorithm prefers more tightly coupled video clusters. But greater bandwidthd is more error-prone to noise in the BoI descriptors. Further exploration is needed on how to select the bandwidthd.
3. There exists a limited number of geospatially adjacent landmarks. The farther away the landmarks
Bag-of-Iconics Representation Keyframes
Binary Vectors Video
Collection
Iconic Codebook
ITQ
Binary Hashing
Table 5Statistics of video retrieval datasets
Training dataset Video Frame Time (h)
Total Registered Total Keyframe Registered Iconics Keyframe Clustering
Augmented Videoscape 901 659 605,544 2784 2575 622 0.05 0.11
London YouTube 15,417 4691 184,189,894 4,518,792 1,402,825 97,048 179.58 4.68
Berlin YouTube 13,984 4317 179,380,784 3,395,501 1,086,560 83,262 165.47 4.30
are, the longer videos need to be to capture the necessary trajectories. Such verbose and long videos are generally of less interest to the general public and more burdensome to capture, thus are harder to find in the public domain.
5 Geometry-aware video retrieval
Given an example video, finding relevant or similar videos that share the same geometry background or geometric entity can be helpful for many applications: duplicate detection, surveillance, and geo-localization, to name a few. Our BoI representation makes it possi-ble to retrieve geometrically similar videos in large-scale datasets. To further scale-up the target database, we demonstrate that through state-of-the-art binary hashing [21], indexing, and searching techniques [22], our pro-posed BoI representations can perform geometry-aware video retrieval very effectively and efficiently. An overview of the geometry-aware retrieval pipeline is shown in Fig. 7. For searching the video database, we first follow Section 3 to extract the iconic codebook and build the BoI representations for all database videos. For a given query video, we follow the same algorithm (Section 3.3) and build the corresponding BoI vector. Finding geometrically relevant videos is then equivalent to performing a near-est neighbor search in the BoI space using the histogram intersection kernel (Eq. 4) [36].
It would be challenging to index and search the BoI vec-tor databases if the extracted codebookCcontains a large number of iconic images for a very large video collection. Compact binary representations provide opportunities to easily scale up the target database. We leverage one of the state-of-the-art binary hashing techniques: iterative quan-tization (ITQ) [21] to hash the BoI vector representation
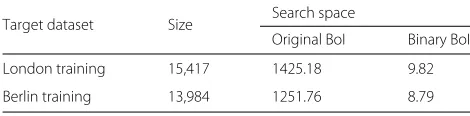
Table 6Speed for geometry-aware video retrieval tasks. Time is given in milliseconds
Target dataset Size Search space
Original BoI Binary BoI
London training 15,417 1425.18 9.82
Berlin training 13,984 1251.76 8.79
into a fixed-length binary string (128 bit in our example, two words on modern 64-bit architectures). Geometry-aware video retrieval is first done in the binary Hamming space with multi-indexed hashing [22]. Then re-ranking in the original BoI space is performed for top 128 retrieved results in the binary space.
5.1 Datasets and setup
We use the same hardware platform as in Section 4.4 to perform experimental evaluations for the geometry-aware video retrieval tasks. The same datasets used in Section 4.4 are also employed for our retrieval evaluation. For the crowdsourced London and Berlin datasets, no ground-truth GPS annotation is available. The Videoscapes dataset [16], however, recorded the ground-truth GPS trajectories for each video within the dataset. The original Videoscapes dataset provides less than 300 hundred videos, with a total length of around 3 h. To demonstrate the scalability of our proposed retrieval approach, we augmented the original Videoscapes dataset by randomly partitioning the original video sequences into shorter but temporally overlapping video sequences. In this way, we can increase the cardinality of the video collections with known geometric connections.
For each of the datasets (London YouTube, Berlin YouTube, and augmented Videoscape), we randomly split the video collection into a disjoint 80% training dataset and a 20% testing dataset. Please refer to Table 5 for train-ing set statistics. We follow Section 3 to extract the code-book and build the BoI representation for the database videos for each training dataset.
Fig. 8Examples of identifiediconicimages on YouTube video keyframes. Best view in color
5.2 Results
Identified iconic images are visualized in Fig. 8. Iconic images from the London YouTube training dataset demonstrated greater variety in terms of visual con-tent. The variety in iconic views can form a better group of basesfor representing individual videos. Com-pared to borrowing codebook from photo collections (Section 4), directly extracting iconic codebook from video keyframes can lead to higher registration rate. Thirty percent of videos are registered in the London training dataset (Table 5) using the video iconic code-book, while only 13% of videos are registered in the London dataset (Table 1) using the photo iconic code-book. Being able to find a group of well-formed bases from noisy crowdsourced data further demonstrated the robustness and effectiveness of our proposed BoI representation.
Qualitative retrieval results from the two YouTube datasets are shown in Fig. 10. Although the dataset is large and noisy, we can successfully retrieve geometrically relevant videos. This underlines the efficiency, effective-ness, and scalability of our proposed representation for large-scale video retrieval tasks.
Quantitatively evaluations of the retrieval perfor-mance of our BoI representation are performed on the
augmented Videoscapes dataset. For each query video, training videos that lie in a 50-m radius are defined as the ground truth. We achieve a precision of over 0.90 at a recall rate of 0.36 with BoI vectors, and a precision of 0.85 with binary codes at the same recall rate. Detailed precision-recall curves can be found in Fig. 9. By com-pressing the original high-dimensional sparse BoI vectors into compact binary descriptors, over 100×speed up can be achieved with sacrificing 0.05 precision at 0.30 recall. In general, our proposed Bag-of-Iconics representation is effective for video retrieval tasks, and robust under different distance metrics.
We further explored different options for building BoI histograms with extracted codebooks. For example, BoI histograms are built with a different number of simi-lar iconic images, with/without geometric verification. Quantitative evaluations can be found in Fig. 9. With geo-metric verification enabled, increasing the number of the nearest neighbors has a negligible impact on retrieval per-formance (see 2-NN-GV and 5-NN-GV precision-recall curves). Similar iconic images without rigid geometric transformations are filtered out in the histogram, and thereby removing the noise. Without geometric verifica-tion, the iconic image retrieval error will be amplified with an increasing number of nearest neighbors. For
a
b
Table 7Performance evaluation for geometry-aware video retrieval tasks
Feature SIFT-BOW BOI CNN
Precision 0.81 0.90 0.69
Recall 0.35 0.36 0.28
example, 5-NN have lower accuracy than 2-NN in both BoI histogram and binary retrieval. Thus, geometric ver-ification is critical for our proposed representation to achieve high quality results.
We also compare our proposed BOI feature repre-sentation against other feature reprerepre-sentations for the geometry-aware video retrieval task. Experimental com-parisons are performed on the augmented Videoscapes dataset. For each query video, training videos within a 50-m range are considered as ground truth.
Convolutional neural networks (CNN) have demon-strated their successes in extracting feature represen-tations from visual inputs. Thus we also compare our BoI representation with CNN based features. The ResNet-50 network pretrained on ImageNet dataset [37] is used as feature extractor. Output from the last fully-connected layer is used as the visual feature
representation. For a given video, keyframes are extracted as described in Section 3.1. The convolutional feature representation for each keyframe is obtained by feeding the keyframe into the ResNet-50 neural network. Then, feature vectors for all keyframes are averaged together to get the video feature representation. We also com-pare our BoI representation with the traditional Bag-of-Visual-words representation. For each video, SIFT features from all extracted keyframes are aggregated into the Bag-of-Words histogram to build the global feature representation.
Detailed performances can be found in Table 7. For our novel geometry-aware video retrieval task, our pro-posed BoI representation exceeds the traditional BoW. Surprisingly, CNN based features do not show strong performances. For one thing, the pre-trained network is not fine-tuned on our video data, thus may not be able to provide the optimal feature representation for this task. For another, CNNs are great at high level seman-tic visual tasks. However, our proposed geometry-aware video retrieval task enforces low-level geometric con-straints, which the CNN is not exposed to during its training process. We leave as future work integrating such geometry constraints into the end-to-end learning frame-work of CNN models.
5.3 Discussions
We have proposed a “Bag-of-Iconics” representation for the analysis of large-scale unstructured video collec-tions. Our results reveal the importance of geometric verification. On the “scene” level of abstraction, the detection of scene similarity/overlap among videos pro-vides a shared context among visual data that is robust to a certain class of scene dynamic content, e.g., we can associate different events recorded in a common setting through background co-occurrence (see Fig. 10).
The experimental results in Section 5.2 show the effec-tiveness of our proposed BoI representation, but also reveal several opportunities for further improvements and research efforts (Figs. 11 and 12).
5.3.1 Association completeness
Constructing the iconic codebook through a combination of keyframe-based processing and our aggressive reduc-tion of the image associareduc-tion space will inevitably com-promise completeness. Going forward, we will explore the use of recent efficiency-driven pairwise geometric verifi-cation methods, e.g., [38, 39], to expand the scope of image associations within our streaming framework.
5.3.2 Spatio-temporal representation
Our implementation focuses on geometric similarity as an association cue. However, for tasks like video semantic classification, or action recognition, the temporal ordering of the observation provides valuable information not cur-rently integrated into our framework. We will explore
a
b
c
d
e
f
g
g
a
b
c
d
d
e
f
g
h
i
j
k
l
m
Fig. 12Example of 3D model alignment. Visualizations obtained from the Berlin and London YouTube dataset. Reichastag (a, c) and Brandenburg Gate (b, d) are aligned by video trajectory (f) as shown in (d, e). Tower of London (g, i) and Tower Bridge (h, j) are aligned by the video trajectory (m) as shown in (k, l). Best view in color
possible extensions to our current BoI representation to incorporate temporal information.
6 Conclusions
In this paper, we tackle the problem of understanding inter-sequence relationships within a large-scale video datasets. To this end, we propose to represent videos as a bag of iconic images. We develop a fully automatic and unsupervised approach to summarize a crowdsourced video collection by a compact set of representative iconic images. We further demonstrate the effectiveness of our proposed BoI representation through two novel applica-tions: (1) retrieving geometry-aware relevant videos from
a video collection and (2) mining geospatially adjacent landmarks and align reconstructed 3D models together using common video motion trajectories. For future research, we plan to apply the Bag-of-Iconic representa-tion for new video analysis tasks.
Acknowledgements
Supported in part by the NSF No. IIS-1349074, No. CNS-1405847. Partially funded by MITRE Corp.
Authors’ contributions
All authors read and approved the final manuscript.
Competing interests
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Author details
1Department of Computer Science, UNC Chapel Hill, 201 S Columbia Street,
Chapel Hill 27599, USA.2Department of Computer Science, Stevens Institute
of Technology, 1 Castle Point Terrace, Hoboken 07030, USA.3MITRE
Corporation, 202 Burlington Rd, Bedford 01730, USA.
Received: 31 May 2017 Accepted: 26 November 2017
References
1. Anderson R, Gallup D, Barron JT, Kontkanen J, Snavely N, Hernández C, Agarwal S, Seitz SM (2016) Jump: virtual reality video. ACM Trans Graphics (TOG) 35(6):198
2. (2017) 160 Amazing YouTube Statistics. http://expandedramblings.com/ index.php/youtube-statistics/. Accessed May 2017
3. Snavely N, Seitz SM, Szeliski R (2006) Photo tourism: exploring photo collections in 3D. ACM Trans. Graph. 25(3):835–846.
doi:10.1145/1141911.1141964. http://doi.acm.org/10.1145/1141911. 1141964
4. Snavely N, Seitz SM, Szeliski R (2008) Modeling the world from internet photo collections. IJCV 80(2):189–210
5. Agarwal S, Furukawa Y, Snavely N, Simon I, Curless B, Seitz SM, Szeliski R (2011) Building rome in a day. Commun ACM 54(10):105–112
6. Frahm JM, Fite-Georgel P, Gallup D, Johnson T, Raguram R, Wu C, Jen Y-H, Dunn E, Clipp B, Lazebnik S, Pollefeys Marc (2010) Building Rome on a cloudless day. In: Daniilidis K, Maragos P, Paragios N (eds). Computer Vision – ECCV 2010: 11th European Conference on Computer Vision, Heraklion, Crete, Greece, September 5-11, 2010, Proceedings, Part IV. Springer Berlin Heidelberg, Berlin. pp 368–381. doi:10.1007/978-3-642-15561-1_27. https://doi.org/10.1007/978-3-642-15561-1_27
7. Heinly J, Schönberger JL, Dunn E, Frahm JM (2015) Reconstructing the world* in six days. In: 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp 3287–3295. doi:10.1109/CVPR.2015.7298949 8. Russakovsky O, Deng J, Su H, Krause J, Satheesh S, Ma S, Huang Z,
Karpathy A, Khosla A, Bernstein M, Berg AC, Fei-Fei L (2015) ImageNet large scale visual recognition challenge. Int J Comput Vis (IJCV) 115(3):211–252. doi:10.1007/s11263-015-0816-y
9. Krizhevsky A, Sutskever I, Hinton GE (2012) Imagenet classification with deep convolutional neural networks. In: Pereira F, Burges CJC, Bottou L, Weinberger KQ (eds). Advances in Neural Information Processing Systems 25. Curran Associates, Inc. pp 1097–1105. http://papers.nips.cc/paper/ 4824-imagenet-classification-with-deep-convolutional-neural-networks. pdf
10. Girshick R, Donahue J, Darrell T, Malik J (2014) Rich feature hierarchies for accurate object detection and semantic segmentation. In: 2014 IEEE Conference on Computer Vision and Pattern Recognition. pp 580–587. doi:10.1109/CVPR.2014.81
11. Shelhamer E, Long J, Darrell T (2017) Fully convolutional networks for semantic segmentation. IEEE Trans Pattern Anal Mach Intell 39(4):640–651. doi:10.1109/TPAMI.2016.2572683
12. Zhao B, Xing EP (2014) Quasi real-time summarization for consumer videos. In: 2014 IEEE Conference on Computer Vision and Pattern Recognition. pp 2513–2520. doi:10.1109/CVPR.2014.322
13. Simonyan K, Zisserman A (2014) Two-stream convolutional networks for action recognition in videos. In: Ghahramani Z, Welling M, Cortes C, Lawrence ND, Weinberger KQ (eds). Advances in Neural Information Processing Systems 27. Curran Associates, Inc. pp 568–576. http://papers. nips.cc/paper/5353-two-stream-convolutional-networks-for-action-recognition-in-videos.pdf
14. Wang K, Dunn E, Rodriguez M, Frahm JM (2017) Computer Vision – ACCV 2016: 13th Asian Conference on Computer Vision, Taipei, Taiwan, November 20-24, 2016, Revised Selected Papers, Part IV. In: Lai S-H, Lepetit V, Nishino K, Sato Y (eds). Springer, Cham. pp 408–23 15. Raguram R, Wu C, Frahm J-M, Lazebnik S (2011) Modeling and
recognition of landmark image collections using iconic scene graphs. Int
J Comput Vis 95(3):213–239. doi:10.1007/s11263-011-0445-z. https://doi. org/10.1007/s11263-011-0445-z
16. Tompkin J, Kim KI, Kautz J, Theobalt C (2012) Videoscapes: exploring sparse, unstructured video collections. ACM Trans Graph 31(4):68:1–68:12. doi:10.1145/2185520.2185564. http://doi.acm.org/10.1145/2185520. 2185564
17. Wolf W (1996) Key frame selection by motion analysis. In: Acoustics, Speech, and Signal Processing, 1996. ICASSP-96. Conference Proceedings., 1996 IEEE International Conference On, vol. 2. IEEE. pp 1228–31 18. Ahmed MT, Dailey MN, Landabaso JL, Herrero N (2010) Robust key frame
extraction for 3D reconstruction from video streams. In: VISAPP (1). pp 231–236
19. Ajmal M, Ashraf MH, Shakir M, Abbas Y, Shah FA (2012) Video summarization: techniques and classification. In: Bolc L, Tadeusiewicz R, Chmielewski LJ, Wojciechowski K (eds). Computer Vision and Graphics: International Conference, ICCVG 2012, Warsaw, Poland, September 24-26, 2012. Proceedings. Springer Berlin Heidelberg, Berlin. pp 1–13. doi:10.1007/978-3-642-33564-8_1. https://doi.org/10.1007/978-3-642-33564-8_1
20. Hu W, Xie N, Li L, Zeng X, Maybank S (2011) A survey on visual
content-based video indexing and retrieval. IEEE Trans Syst Man Cybernet Part C Appl Rev 41(6):797-819. doi:10.1109/TSMCC.2011.2109710 21. Gong Y, Lazebnik S, Gordo A, Perronnin F (2013) Iterative quantization: a
procrustean approach to learning binary codes for large-scale image retrieval. TPAMI 35(12):2916–2929
22. Norouzi M, Punjani A, Fleet DJ (2012) Fast search in hamming space with multi-index hashing. In: 2012 IEEE Conference on Computer Vision and Pattern Recognition. pp 3108–3115. doi:10.1109/CVPR.2012.6248043 23. Scaramuzza D, Fraundorfer F (2011) Visual odometry [tutorial]. IEEE Robot
Automation Mag 18(4):80–92. doi:10.1109/MRA.2011.943233
24. Zheng E, Wang K, Dunn E, Frahm JM (2014) Joint object class sequencing and trajectory triangulation (jost). In: Fleet D, Pajdla T, Schiele B, Tuytelaars T (eds). Computer Vision – ECCV 2014. Lecture Notes in Computer Science, vol. 8695. Springer, New York. pp 599–614
25. Zach C, Gallup D, Frahm JM (2008) Fast gain-adaptive KLT tracking on the GPU. In: 2008 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops. pp 1–7. doi:10.1109/CVPRW.2008. 4563089
26. Shi J, Tomasi C (1994) Good features to track. In: 1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. pp 593–600. doi:10.1109/CVPR.1994.323794
27. Kim SJ, Frahm JM, Pollefeys M (2007) Joint feature tracking and radiometric calibration from auto-exposure video. In: 2007 IEEE 11th International Conference on Computer Vision. IEEE. pp 1–8. doi:10.1109/ICCV.2007.4408945
28. Hartley RI, Zisserman A (2004) Multiple view geometry in computer vision, 2nd edn. Cambridge University Press, Cambridge
29. Lowe DG (2004) Distinctive image features from scale-invariant keypoints. IJCV 60(2):91–110
30. Nistér D, Stewenius H (2006) Scalable recognition with a vocabulary tree. In: 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), vol. 2. pp 2161–2168.
doi:10.1109/CVPR.2006.264
31. Lou Y, Snavely N, Gehrke J (2012) MatchMiner: efficient spanning structure mining in large image collections. In: Fitzgibbon A, Lazebnik S, Perona P, Sato Y, Schmid C (eds). Computer Vision – ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, October 7-13, 2012, Proceedings, Part II. Springer Berlin Heidelberg, Berlin. pp 45–58. doi:10.1007/978-3-642-33709-3_4. https://doi.org/10.1007/978-3-642-33709-3_4
32. Comaniciu D, Meer P (2002) Mean shift: a robust approach toward feature space analysis. IEEE Trans Pattern Anal Mach Intell 24(5):603–619. doi:10.1109/34.1000236
33. Schonberger JL, Frahm JM (2016) Structure-from-motion revisited. In: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp 4104–4113. doi:10.1109/CVPR.2016.445
34. Agarwal S, Mierle K Others: ceres solver. http://ceres-solver.org. Accessed 02 Dec 2017
36. Muja M, Lowe DG (2014) Scalable nearest neighbor algorithms for high dimensional data. IEEE Trans Pattern Anal Mach Intell 36(11):2227-2240. doi:10.1109/TPAMI.2014.2321376
37. He K, Zhang X, Ren S, Sun J (2016) Deep residual learning for image recognition. In: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp 770–778. doi:10.1109/CVPR.2016.90 38. Havlena M, Schindler K (2014) Vocmatch: efficient multiview
correspondence for structure from motion. In: Fleet D, Pajdla T, Schiele B, Tuytelaars T (eds). Computer Vision – ECCV 2014: 13th European Conference, Zurich, Switzerland, September 6-12, 2014, Proceedings, Part III. Springer International Publishing, Cham. pp 46–60.
doi:10.1007/978-3-319-10578-9_4. https://doi.org/10.1007/978-3-319-10578-9_4