ISSN (Print) : 2320 – 3765 ISSN (Online): 2278 – 8875
I
nternational
J
ournal of
A
dvanced
R
esearch in
E
lectrical,
E
lectronics and
I
nstrumentation
E
ngineering
(An ISO 3297: 2007 Certified Organization)Website: www.ijareeie.com Vol. 6, Issue 12, December 2017
Gesture Controlled Robotic Palm
Vidheesha U.Patil, Siddhi N. Gaikwad, Prof. Sangita A. Patil
Department of Electronics and Telecommunication, PCCOE, Nigadi, Pune, Maharashtra, India
ABSTRACT: Sensor plays an important role in robotics. Sensors are used to determine the current state of the system. Robotic applications demand sensors with high degrees of repeatability, precision, and reliability. Flex sensor is such a device, which accomplish the above task with great degree of accuracy. The pick and place operation of the robotic arm can be efficiently controlled using micro controller programming Arduino. This designed work is an educational based concept as robotic control is an exciting and high challenge research work in recent year.
KEYWORDS: Robotic Hand, Controller, Materials Handling, Flex Sensor.
I. INTRODUCTION
Robots have the potential to play a large role in our world. Instead of humans the robots can be assigned with tasks as to avoid the human loss. Robotic hand systems can be used in robust environments such as those encountered in nuclear, military, chemical and most for space applications. In this project, we have tried to design a robotic hand which is a replica of a human hand. The motions of the human fingers are sensed by flex sensor. Here, we have used an Arduino microcontroller as a transmitter and receiver. All motors are connected to the the microcontroller. As per the hand gestures, the Arduino will work all motors through output pulses. The target was to reproduce human finger motions which perform hold and grab of the objects as like human hand. As we see in industries, the major concern nowadays is the risks human labour takes for a specific job that can be easily carried out by any machine. So this Robotic palm can be used to carry out such cumbersome tasks effortlessly. This will reduce or completely avoid any possible accidents. To make an electronic device for the industrial use with high precision for a specific task. To replicate a human hand with 5 fingers which is more advantageous than 3 fingered robotic arm. To develop the prototype of a product this can be used as prosthetic replacement part of the human body.
II.LITERATURE SURVEY
This paper focuses on understanding the different techniques that are used for human robot interaction in robotic hand arm systems. Diversification is stated in areas of human and robotic hand interaction, the degrees of freedom, the grasping ability, number of fingers and materials used for the hand. The flexibility of grasp is compared in terms of Degrees Of Freedom (DOF) and the number of finger end effectors. The controlling method is either through sensor based or gesture controlled or simulation based or pre-defined positions [1]. This paper presents the mechatronic design of a robotic hand for prosthetic applications. The main characteristic of this robotic hand is its biologically-inspired parallel actuation system, which is based on the behaviour/strength space of the Flexor DigitorumProfundus (FDP) and the Flexor DigitorumSuperficialis (FDS) muscles. The design separates the strength space of the FDS and FDP muscles into a lighter strength region where finer manipulation and general approach tasks are executed, and a higher strength region where the more robust grasps are achieved. Two parallel actuator types and kinematic structures are designed [2].
ISSN (Print) : 2320 – 3765 ISSN (Online): 2278 – 8875
I
nternational
J
ournal of
A
dvanced
R
esearch in
E
lectrical,
E
lectronics and
I
nstrumentation
E
ngineering
(An ISO 3297: 2007 Certified Organization)Website: www.ijareeie.com Vol. 6, Issue 12, December 2017
different tasks. Details of hand control hardware and software are presented in this paper. Results of the experimental work for different objects are enumerated. Referring this, now we are building a low cost robotic hand gloves which will overcome physical weakness in old people [3]. In this paper author has explained the development of a robotic arm, prepared by him, which is operated & controlled wirelessly with the help of hand gestures. It’s a CLASS – 5 Robot (Numerical Control Robot).The complete robotic assembly is made into 2 parts viz a transmitter assembly put on the gloves comprising of APC-220 Module, Arduino Board, Gyroscope, Accelerometer and a receiver( Robotic Arm) comprising of APC-220 Module, Arduino Board, Servo Motors and arms mounted on circular revolving base made of acrylic sheets[4].
In this working positioning scheme in sensor networks are presented in this study. A framework monitoring the signal strength based on the transmission protocol AODV and the placement of Zigbees is established and used in sensor node positioning. To treat indoor and outdoor environments, two positioning schemes are presented accordingly. The indoor scheme clusters the localization zone into several subzones based on the strongest received signal, whereas the outdoor scheme adopts the estimated distance to determine them ostpossible position of the sensed node. Unlike existing studies, our methods do not need any location fingerprinting process in advance or location database. One-floor and multi-One-floor environment for indoor positioning cases are examined, where the accuracies of different node placements are studied. Two positioning algorithms used in outdoor cases are investigated, where field tests are conducted to evaluate the performance. Results show that the proposed methods can achieve good accuracy in both indoor and outdoor environments [5].
III.PROPOSED SYSTEM
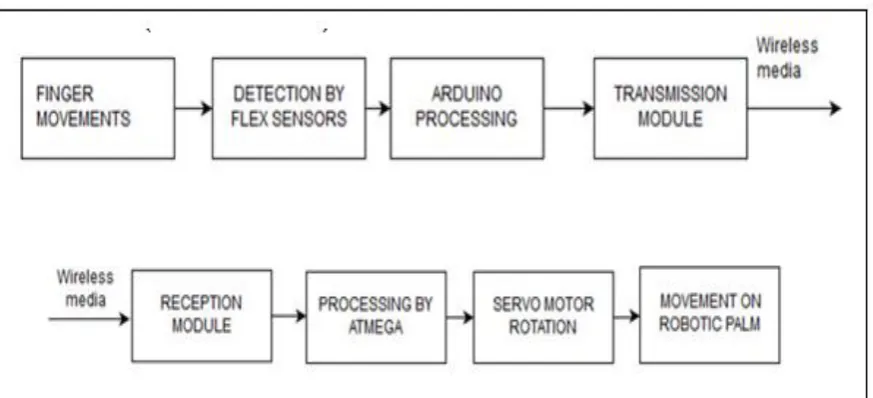
Fig 3.1 Block diagram for gesture control Robotic Palm
ISSN (Print) : 2320 – 3765 ISSN (Online): 2278 – 8875
I
nternational
J
ournal of
A
dvanced
R
esearch in
E
lectrical,
E
lectronics and
I
nstrumentation
E
ngineering
(An ISO 3297: 2007 Certified Organization)Website: www.ijareeie.com Vol. 6, Issue 12, December 2017
3.1 Hardware Description
A. Transmitter (Controller1-Glove) 1. Robotic glove:
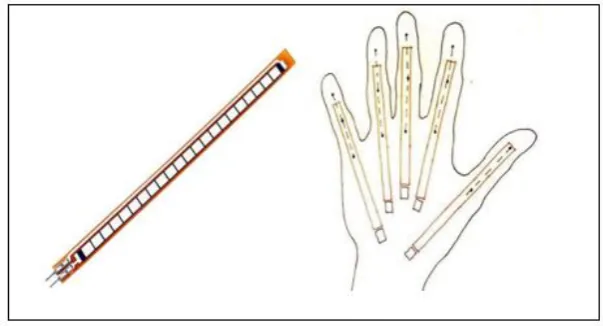
Fig 3.2 Flex Sensor
Robotic glove houses the circuitry which controls the robotic arm. It consists of Arduino UNO which is programmed in such a way that it transfers the required data with the help of a wireless module and transmits it to another controller which rotates the motor whereby controlling the robotic arm. At the same time the Flex sensor is doing its job by sending the degree of movement of the finger to the Arduino Uno. The processed values are then transmitted from the Module (Trans-receiver) to the robotic arm. The module takes the feedback from the arm and sends the new processed signals to it.
2. Atmega Microcontroller (C1):
The flex sensor output is analog in nature. This is converted into digital form by the built in ADC Converter present in Arduino Uno microcontroller named Controller1(X1).The analog output from flex sensors is in the form of resistance. This resistance has to be converted into variable voltage, which is further processed. The data is then given to the Xbee 5123 module.
3) Xbee 5123 module (X1):
The Modules were engineered to meet IEEE 802.15.4 standards and support the unique needs of low-cost, low-power wireless sensor networks. Data is fed into one module and the data is sent out the other end of the wireless link. If more advance function is required, the modules provide an extensive set of AT commands. Module 1 transmits the data in HEX/ASCII format.
(B) Reception (Controller2-Robotic Palm)
1. Xbee 5123 module (X2):
The XBee module named X2 acts as the receiver or the Slave, receiving the data transmitted by the X1.This is the receiver end of the wireless transmission network. The received data is sent for further processing.
2. Atmega Microcontroller (C2):
ISSN (Print) : 2320 – 3765 ISSN (Online): 2278 – 8875
I
nternational
J
ournal of
A
dvanced
R
esearch in
E
lectrical,
E
lectronics and
I
nstrumentation
E
ngineering
(An ISO 3297: 2007 Certified Organization)Website: www.ijareeie.com Vol. 6, Issue 12, December 2017
3. Servo Motors:
The C2 Controller will process the input given to it through XBee module X2 and hence will cause the motorsto rotate. The output is in the form of movement of robot which is caused due to the change in the position of servo motors.
4. Robotic Palm:
It is the main instrument where implementation of the program from the robotic glove takes place. It consists of total of 5 nos. of Servos, connected in such a way that it provides 1/2 DOF’s (Degrees of Freedom) to the system. 5 servos are attached for controlling the direction of each of fingers of the robot. The robotic arm mimics the movement of glove worn by the user, when the glove is tilted in the forward direction or any such direction, the arm spontaneously follows suit. The target was to reproduce human finger motion which are perform in order to hold and grab the object as like human hand.
IV.HARDWARE IMPLIMENTATION
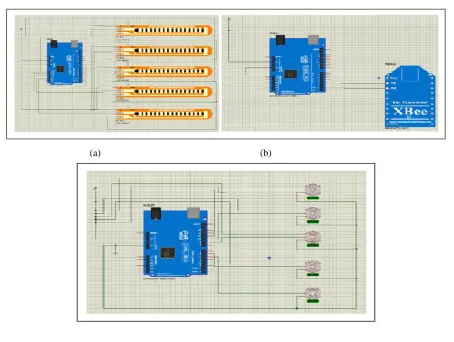
4. 1 Hardware Module
(a) (b)
(c)
ISSN (Print) : 2320 – 3765 ISSN (Online): 2278 – 8875
I
nternational
J
ournal of
A
dvanced
R
esearch in
E
lectrical,
E
lectronics and
I
nstrumentation
E
ngineering
(An ISO 3297: 2007 Certified Organization)Website: www.ijareeie.com Vol. 6, Issue 12, December 2017
V.CONCLUSION
The project should introduce to a low cost robotic hand that can reproduce the abilities and movements of a human hand in order to perform curtain task such as holding, grabbing, etc. The major conclusion should be to replicate a human hand with 5 fingers which is advantageous than 3 fingered robotic arm. The project has a major contribution in the Industrial domain. Some places in the industries are dangerous for human life therefore a simple prosthetic arm can be very advantageous which can replicate human made gestures from a distance. The hand could be able to be redeveloped by using stronger materials and can then be commercialized for use in the industries.
REFERENCES
1. C.V. Vishal Ramaswamy, S. Angel Deborah, “A Survey of Robotic Hand- Arm Systems”, International Journal of Computer Applications (0975 – 8887) Volume 109 – No. 8, January 2015.
2. Anthony L. Crawford, Alba Perez-Gracia, “Design of a Robotic Hand and Simple EMG Input Controller with a Biologically-Inspired Parallel Actuation System for Prosthetic Applications”.
3. Abhijeet S. Taksale, Amol S. Dangale, Imran N. Momin , Sagar V. Sukode, “Low Cost Robotic Hand Gloves “, IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. V (Mar - Apr. 2014), PP 140-144.
4. ShamsheerVerma, “Hand Gestures Remote Controlled Robotic Arm”, Advance in Electronic and Electric Engineering, ISSN 2231-1297, Volume 3, Number 5 (2013), pp. 601-606.
5. Wen-HsingKuo, Yung-Sheng Chen,Kui-Tai Cheng, and Tai-Wei Lu 29 February 2016 " Signal Strength Based Indoor and Outdoor Localization Scheme in Zigbee Sensor Networks "IAENG International Journal of Computer Science, 43:1, IJCS_43_1_07
6. AbhishekDeendayalPatil ,HusbanImtiyazKadiri ,AjinkyaShriram Joshi ,Atul B Wani International Journal of Science, Engineering and Technology Research (IJSETR), Volume 5, Issue 3, March 2016" IOT Based Gesture Movement Recognize Robot "
7. Nicholas Thayer and S.Priya. 2011, “Design and implementation of a dexterous anthropomorphic robotic typing (DART) hand”, Smart Mater. Struct.20 (2011) 035010(12pp), doi:10.1088/0964-1726/20/3/035010.
8. Cipriani, C., Zaccone, F., Stellin, G., Beccai, L., Cappiello, G., Carrozza, M.C., and Dario, P., 2006, “Closed-loop Controller for a Bio-inspired Multi-fingered Under actuated Prosthesis”, Proc. of the 2006 IEEE Int. Conf. on Robotics and Automation, Orlando, FL, USA, May pp. 2111-2116.
9. Hoshino, K., and Kawabuchi, I., 2006, “Dexterous robot hand with pinching function at fingertips”, Proc. of the 1st IEEE/RAS Int. Conf. on Biomedical Robotics and Biomechatronics, BioRob 06, Pisa, Italy, February 20-22.