R E S E A R C H
Open Access
Oscillations of differential equations
generated by several deviating arguments
George E Chatzarakis
1and Tongxing Li
2**Correspondence:
2School of Information Science and
Engineering, Linyi University, Linyi, Shandong 276005, P.R. China Full list of author information is available at the end of the article
Abstract
Sufficient conditions, involving lim sup and lim inf, for the oscillation of all solutions of differential equations with several not necessarily monotone deviating arguments and nonnegative coefficients are established. Corresponding differential equations of both delayed and advanced type are studied. We illustrate the results and the improvement over other known oscillation criteria by examples, numerically solved in MATLAB.
MSC: 34K06; 34K11
Keywords: differential equation; non-monotone argument; oscillatory solution; nonoscillatory solution
1 Introduction
Consider the differential equations with several variable deviating arguments of either de-layed
x(t) +
m
i=
pi(t)xτi(t)
= for allt≥t, (E)
or advanced type
x(t) –
m
i=
qi(t)xσi(t)
= for allt≥t, (E)
wherepi,qi, ≤i≤m, are functions of nonnegative real numbers, andτi,σi, ≤i≤m,
are functions of positive real numbers such that
τi(t) <t, t≥t and lim
t→∞τi(t) =∞, ≤i≤m, (.)
and
σi(t) >t, t≥t, ≤i≤m, (.)
respectively.
In addition, we consider the initial condition for (E)
x(t) =ϕ(t), t≤t, (.)
whereϕ: (–∞,t]→Ris a bounded Borel measurable function.
Asolutionof (E), (.) is an absolutely continuous on [t,∞) function satisfying (E) for
almost allt≥tand (.) for allt≤t. By a solution of (E) we mean an absolutely
contin-uous on [t,∞) function satisfying (E) for almost allt≥t.
A solution of (E) or (E) isoscillatoryif it is neither eventually positive nor eventually neg-ative. If there exists an eventually positive or an eventually negative solution, the equation isnonoscillatory. An equation isoscillatoryif all its solutions oscillate.
The problem of establishing sufficient conditions for the oscillation of all solutions of equations (E) or (E) has been the subject of many investigations. The reader is referred to [–] and the references cited therein. Most of these papers concern the special case where the arguments are nondecreasing, while a small number of these papers are con-cerned with the general case where the arguments are not necessarily monotone. See, for example, [–, ] and the references cited therein.
In the present paper, we establish new oscillation criteria for the oscillation of all solu-tions of (E) and (E) when the arguments are not necessarily monotone. Our results essen-tially improve several known criteria existing in the literature.
Throughout this paper, we are going to use the following notation:
α:=lim inf
t→∞
t
τ(t) m
i=
pi(s)ds, (.)
β:=lim inf
t→∞ σ(t)
t m
i=
qi(s)ds, (.)
D(ω) := ⎧ ⎨ ⎩
, ifω> /e,
–ω–√–ω–ω
, ifω∈[, /e],
(.)
MD:=lim sup
t→∞ t
τ(t) m
i=
pi(s)ds, (.)
MA:=lim sup
t→∞
σ(t)
t m
i=
qi(s)ds, (.)
whereτ(t) =max≤i≤mτi(t),σ(t) =min≤i≤mσi(t) andτi(t),σi(t) (in (.) and (.)) are
non-decreasing,i= , , . . . ,m.
1.1 DDEs
By Remark .. in [], it is clear that ifτi(t), ≤i≤m, are nondecreasing and
MD> , (.)
In Ladde [] and in Ladas and Stavroulakis [] proved that if
α>
e, (.)
then all solutions of (E) are oscillatory.
In , Hunt and Yorke [] proved that ifτi(t) are nondecreasing,t–τi(t)≤τ, ≤i≤ m, and
lim inf
t→∞
m
i= pi(t)
t–τi(t)
>
e, (.)
then all solutions of (E) are oscillatory.
Assume thatτi(t), ≤i≤m, are not necessarily monotone. Set hi(t) := sup
t≤s≤t
τi(s) and h(t) := max
≤i≤mhi(t), i= , , . . . ,m, (.)
fort≥t, and
a(t,s) :=exp t
s m
i=
pi(ζ)dζ
,
ar+(t,s) :=exp t
s m
i=
pi(ζ)arζ,τi(ζ)
dζ
, r∈N.
(.)
Clearly,hi(t),h(t) are nondecreasing andτi(t)≤hi(t)≤h(t) <tfor allt≥t.
In , Bravermanet al.[] proved that if, for somer∈N,
lim sup
t→∞
t
h(t) m
i=
pi(ζ)arh(t),τi(ζ)
dζ > , (.)
or
lim sup
t→∞
t
h(t) m
i=
pi(ζ)arh(t),τi(ζ)
dζ > –D(α), (.)
or
lim inf
t→∞ t
h(t) m
i=
pi(ζ)arh(t),τi(ζ)
dζ>
e, (.)
then all solutions of (E) oscillate.
In , Chatzarakis and Péics [] proved that if
lim sup
t→∞ t
h(t) m
i= pi(ζ)ar
h(ζ),τi(ζ)
dζ> +lnλ
λ
–D(α), (.)
whereλis the smaller root of the transcendental equationeαλ=λ, then all solutions of
Very recently, Chatzarakis [] proved that if, for somej∈N,
lim sup
t→∞ t
h(t) P(s)exp
h(t)
τ(s)
Pj(u)du
ds> , (.)
or
lim sup
t→∞ t
h(t) P(s)exp
h(t)
τ(s)
Pj(u)du
ds> –D(α), (.)
or
lim sup
t→∞ t
h(t) P(s)exp
t
τ(s)
Pj(u)du
ds>
D(α), (.) or
lim sup
t→∞ t
h(t) P(s)exp
h(s)
τ(s)
Pj(u)du
ds> +lnλ
λ
–D(α), (.)
or
lim inf
t→∞ t
h(t) P(s)exp
h(s)
τ(s)
Pj(u)du
ds>
e, (.)
where
Pj(t) =P(t)
+ t
τ(t) P(s)exp
t
τ(s)
P(u)exp
u
τ(u)
Pj–(ξ)dξ
du
ds
, (.)
withP(t) =P(t) =
m
i=pi(t), then all solutions of (E) are oscillatory.
1.2 ADEs
For equation (E), the dual condition of (.) is
MA> (.)
(see [], paragraph .).
In Ladde [] and in Ladas and Stavroulakis [] proved that if
β>
e, (.)
then all solutions of (E) are oscillatory.
In , Zhou [] proved that ifσi(t) are nondecreasing,σi(t) –t≤σ, ≤i≤m, and
lim inf
t→∞
m
i= qi(t)
σi(t) –t
>
e, (.)
Assume thatσi(t), ≤i≤m, are not necessarily monotone. Set
then all solutions of (E) are oscillatory.
Very recently, Chatzarakis [] proved that if, for somej∈N,
where
Qj(t) =Q(t)
+ σ(t)
t
Q(s)exp σ(s)
t
Q(u)exp σ(u)
u
Qj–(ξ)dξ
du
ds
, (.)
withQ(t) =Q(t) =
m
i=qi(t), then all solutions of (E) are oscillatory.
2 Main results
2.1 DDEs
We further study (E) and derive new sufficient oscillation conditions, involvinglim sup andlim inf, which essentially improve all known results in the literature. For this purpose, we will use the following three lemmas. The proofs of them are similar to the proofs of Lemmas .., .. and .. in [], respectively.
Lemma Assume that h(t)is defined by(.).Then
lim inf
t→∞ t
τ(t) m
i=
pi(s)ds=lim inf t→∞
t
h(t) m
i=
pi(s)ds. (.)
Lemma Assume that x is an eventually positive solution of(E),h(t)is defined by(.)
andαby(.)with <α≤/e.Then
lim inf
t→∞ x(t)
x(h(t))≥D(α). (.)
Lemma Assume that x is an eventually positive solution of(E),h(t)is defined by(.)
andαby(.)with <α≤/e.Then
lim inf
t→∞ x(h(t))
x(t) ≥λ, (.)
whereλis the smaller root of the transcendental equationλ=eαλ.
Based on the above lemmas, we establish the following theorems.
Theorem Assume that h(t)is defined by(.)and,for some j∈N,
lim sup
t→∞
t
h(t) P(s)exp
h(t)
τ(s)
P(u)exp
u
τ(u) Rj(ξ)dξ
du
ds> , (.)
where
Rj(t) =P(t)
+ t
τ(t) P(s)exp
t
τ(s)
P(u)exp
u
τ(u)
Rj–(ξ)dξ
du
ds
, (.)
with P(t) =mi=pi(t),R(t) =λP(t),andλis the smaller root of the transcendental equa-tionλ=eαλ.Then all solutions of(E)are oscillatory.
where the solutionx(t) is eventually positive. Then there exists at>tsuch thatx(t) >
andx(τi(t)) > , ≤i≤m, for allt≥t. Thus, from (E) we have
x(t) = –
m
i=
pi(t)xτi(t)
≤ for allt≥t,
which means thatx(t) is an eventually nonincreasing function of positive numbers. Taking into account thatτi(t)≤h(t), (E) implies that
x(t) +
m
i= pi(t)
xh(t)≤x(t) +
m
i= pi(t)x
τi(t)
= for allt≥t,
or
x(t) +P(t)xh(t)≤ for allt≥t. (.)
Observe that (.) implies that, for each> , there exists atsuch that
x(h(t))
x(t) >λ– for allt≥t≥t. (.) Combining inequalities (.) and (.), we obtain
x(t) + (λ–)P(t)x(t)≤, t≥t,
or
x(t) +R(t,)x(t)≤, t≥t, (.)
where
R(t,) = (λ–)P(t). (.)
Applying the Grönwall inequality in (.), we conclude that
x(s)≥x(t)exp
t
s
R(ξ,)dξ
, t≥s≥t. (.)
Now we divide (E) byx(t) > and integrate on [s,t], so
– t
s x(u)
x(u)du= t
s m
i=
pi(u)x(τi(u))
x(u) du
≥ t
s
m
i= pi(u)
x(τ(u))
x(u) du
= t
s
P(u)x(τ(u))
or
lnx(s)
x(t)≥ t
s
P(u)x(τ(u))
x(u) du, t≥s≥t. (.)
Sinceτ(u) <u, settingu=t,s=τ(u) in (.), we take
xτ(u)≥x(u)exp
u
τ(u)
R(ξ,)dξ
. (.)
Combining (.) and (.), we obtain, for sufficiently larget,
lnx(s)
x(t)≥ t
s
P(u)exp
u
τ(u)
R(ξ,)dξ
du
or
x(s)≥x(t)exp
t
s
P(u)exp
u
τ(u)
R(ξ,)dξ
du
. (.)
Hence,
xτ(s)≥x(t)exp
t
τ(s)
P(u)exp
u
τ(u)
R(ξ,)dξ
du
. (.)
Integrating (E) fromτ(t) tot, we have
x(t) –xτ(t)+ t
τ(t) m
i=
pi(s)xτi(s)
ds= ,
or
x(t) –xτ(t)+ t
τ(t)
m
i= pi(s)
xτ(s)ds≤,
i.e.,
x(t) –xτ(t)+ t
τ(t)
P(s)xτ(s)ds≤. (.)
It follows from (.) and (.) that
x(t) –xτ(t)+x(t) t
τ(t) P(s)exp
t
τ(s)
P(u)exp
u
τ(u)
R(ξ,)dξ
du
ds≤.
Multiplying the last inequality byP(t), we find
P(t)x(t) –P(t)xτ(t) +P(t)x(t)
t
τ(t) P(s)exp
t
τ(s)
P(u)exp
u
τ(u)
R(ξ,)dξ
du
Furthermore,
Combining inequalities (.) and (.), we have
x(t) +P(t)x(t)
Taking the steps starting from (.) to (.), we may see thatxsatisfies the inequality
xτ(u)≥x(u)exp
Combining now (.) and (.), we obtain
x(s)≥x(t)exp
from which we take
Multiplying the last inequality byP(t), as before, we find
Therefore, for sufficiently larget,
x(t) +R(t,)x(t)≤, (.)
Repeating the above procedure, it follows by induction that for sufficiently larget
x(t) +Rj(t,)x(t)≤, j∈N,
The strict inequality is valid if we omitx(t) > on the left-hand side. Therefore,
or
Sincemay be taken arbitrarily small, this inequality contradicts (.).
The proof of the theorem is complete.
Theorem Assume thatαis defined by(.)with <α≤/e and h(t)by(.).If for some
where Rjis defined by(.),then all solutions of(E)are oscillatory.
Proof Letxbe an eventually positive solution of (E). Then, as in the proof of Theorem , (.) is satisfied,i.e.,
By combining Lemmas and , it becomes obvious that inequality (.) is fulfilled. So, (.) leads to
Sincemay be taken arbitrarily small, this inequality contradicts (.).
The proof of the theorem is complete.
seems that Theorem is the same as Theorem whenα= . However, one may notice
where Rjis defined by(.),then all solutions of(E)are oscillatory.
Proof Assume, for the sake of contradiction, that there exists a nonoscillatory solutionxof (E) and thatxis eventually positive. Then, as in the proof of Theorem , (.) is satisfied, which yields
By virtue of (.), the last inequality gives
x(t) –xh(t)+
which, in view of (.), gives
lim sup
t→∞ t
h(t) P(s)exp
t
τ(s)
P(u)exp
u
τ(u)
Rj(ξ,)dξ
du
ds≤
D(α)– . Sincemay be taken arbitrarily small, this inequality contradicts (.).
The proof of the theorem is complete.
Theorem Assume thatαis defined by(.)with <α≤/e and h(t)by(.).If for some j∈N
lim sup
t→∞
t
h(t) P(s)exp
h(s)
τ(s)
P(u)exp
u
τ(u) Rj(ξ)dξ
du
ds> +lnλ
λ
–D(α), (.)
where Rjis defined by(.)andλis the smaller root of the transcendental equationλ=eαλ, then all solutions of(E)are oscillatory.
Proof Assume, for the sake of contradiction, that there exists a nonoscillatory solutionx
of (E) and thatxis eventually positive. Then, as in Theorem , (.) holds. Observe that (.) implies that, for each> , there exists atsuch that
λ–< x(h(t))
x(t) for allt≥t. (.)
Noting that by nonincreasingness of the functionx(h(t))/x(s) insit holds
=x(h(t))
x(h(t))≤
x(h(t))
x(s) ≤
x(h(t))
x(t) , t≤h(t)≤s≤t,
in particular for∈(,λ– ), by continuity we see that there exists at∗∈(h(t),t] such
that
<λ–= x(h(t))
x(t∗) . (.)
By (.), it is obvious that
xτ(s)≥xh(s)exp h(s)
τ(s)
P(u)exp
u
τ(u)
Rj(ξ,)dξ
du
. (.)
Integrating (E) fromt∗tot, we have
x(t) –xt∗+ t
t∗ m
i= pi(s)x
τi(s)
ds= ,
or
x(t) –xt∗+ t
t∗
m
i= pi(s)
Hence, for all sufficiently larget, we have
Sincemay be taken arbitrarily small, this inequality contradicts (.).
The proof of the theorem is complete.
Theorem Assume that h(t)is defined by(.)and for some j∈N
where Rjis defined by(.).Then all solutions of(E)are oscillatory.
Proof Assume, for the sake of contradiction, that there exists a nonoscillatory solutionx(t) of (E). Since –x(t) is also a solution of (E), we can confine our discussion only to the case
which means thatx(t) is an eventually nonincreasing function of positive numbers. Fur-thermore, as in previous theorem, (.) is satisfied.
Combining inequalities (.) and (.), we obtain
Taking into account thatxis nonincreasing andh(s) <s, the last inequality becomes
ln
From (.), it follows that there exists a constantc> such that for sufficiently larget
t
Combining inequalities (.) and (.), we obtain
ln
Repeating the above procedure, it follows by induction that for any positive integerk,
x(h(t))
Integrating (E) fromtmtot, we deduce that
x(t) –x(tm) + t
tm m
i=
pi(s)xτi(s)
ds= ,
or
x(t) –x(tm) + t
tm
m
i= pi(s)
xτ(s)ds≤.
Thus
x(t) –x(tm) + t
tm
P(s)xτ(s)ds≤,
which, in view of (.), gives
x(t) –x(tm) +x
h(t)
t
tm
P(s)exp h(s)
τ(s)
P(u)exp
u
τ(u)
Rj(ξ,)dξ
du
ds≤.
The strict inequality is valid if we omitx(t) > on the left-hand side:
–x(tm) +xh(t)
t
tm P(s)exp
h(s)
τ(s)
P(u)exp
u
τ(u)
Rj(ξ,)dξ
du
ds< .
Using the second inequality in (.), we conclude that
x(tm) >c
x
h(t). (.)
Similarly, integration of (E) fromh(t) totmwith a later application of (.) leads to
x(tm) –x
h(t)+xh(tm) tm
h(t)
P(s)exp h(s)
τ(s)
P(u)exp
u
τ(u)
Rj(ξ,)dξ
du
ds≤.
The strict inequality is valid if we omitx(tm) > on the left-hand side:
–xh(t)+xh(tm)
tm
h(t)
exp h(s)
τ(s)
P(u)exp
u
τ(u)
Rj(ξ,)dξ
du
ds< .
Using the first inequality in (.) implies that
xh(t)>c
x
h(tm). (.)
Combining inequalities (.) and (.), we obtain
xh(tm)<
cx
h(t)<
c
x(tm),
which contradicts (.).
2.2 ADEs
Similar oscillation conditions for the (dual) advanced differential equation (E) can be de-rived easily. The proofs are omitted since they are quite similar to the delay equation.
Theorem Assume thatρ(t)is defined by(.),and for some j∈N
lim sup
t→∞
ρ(t)
t
Q(s)exp σ(s)
ρ(t)
Q(u)exp σ(u)
u
Lj(ξ)dξ
du
ds> , (.)
where
Lj(t) =Q(t)
+ σ(t)
t
Q(s)exp σ(s)
t
Q(u)exp σ(u)
u
Lj–(ξ)dξ
du
ds
, (.)
with Q(t) =mi=qi(t),L(t) =λQ(t)andλis the smaller root of the transcendental equa-tionλ=eβλ.Then all solutions of (E)are oscillatory.
Theorem Assume thatβ is defined by(.)with <β≤/e andρ(t)by(.).If for some j∈N
lim sup
t→∞ ρ(t)
t
Q(s)exp σ(s)
ρ(t)
Q(u)exp σ(u)
u
Lj(ξ)dξ
du
ds> –D(β), (.)
where Ljis defined by(.),then all solutions of (E)are oscillatory.
Remark It is clear that the left-hand sides of both conditions (.) and (.) are iden-tical, also the right-hand side of condition (.) reduces to (.) in case thatβ= . So it seems that Theorem is the same as Theorem whenβ= . However, one may notice that the condition <β≤/eis required in Theorem but not in Theorem .
Theorem Assume thatβis defined by(.)with <β≤/e andρ(t)by(.).If for some j∈N
lim sup
t→∞
ρ(t)
t
Q(s)exp σ(s)
t
Q(u)exp σ(u)
u
Lj(ξ)dξ
du
ds>
D(β)– , (.)
where Ljis defined by(.),then all solutions of (E)are oscillatory.
Theorem Assume thatβ is defined by(.)with <β≤/e andρ(t)by(.).If for some j∈N
lim sup
t→∞
ρ(t)
t
Q(s)exp σ(s)
ρ(s)
Q(u)exp σ(u)
u
Lj(ξ)dξ
du
ds
> +lnλ
λ
–D(β), (.)
Theorem Assume thatρ(t)is defined by(.)and for some j∈N
2.3 Differential inequalities
A slight modification in the proofs of Theorems - leads to the following results about differential inequalities.
Theorem Assume that all the conditions of Theorem []or []or []or []or []hold.Then
(i) the delay[advanced]differential inequality
x(t) +
has no eventually positive solutions; (ii) the delay[advanced]differential inequality
x(t) +
has no eventually negative solutions.
2.4 An example
We give an example that illustrates a case when Theorem of the present paper yields oscillation, while previously known results fail. The calculations were made by the use of MATLAB software.
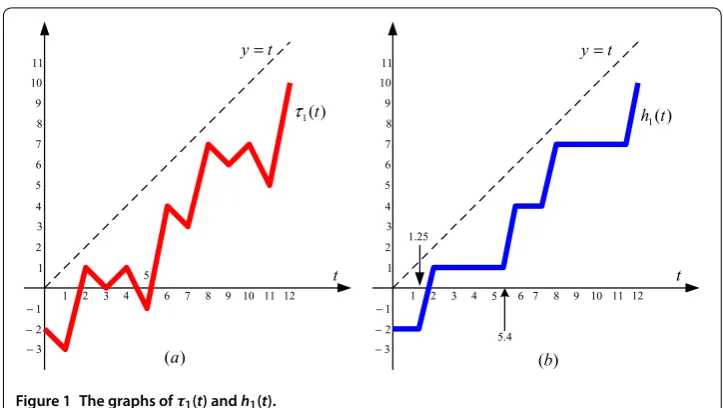
Example Consider the delay differential equation
Figure 1 The graphs ofτ1(t) andh1(t).
By (.), we see (Figure , (b)) that
h(t) =
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
k– , ift∈[k, k+ .], t– k– , ift∈[k+ ., k+ ], k+ , ift∈[k+ , k+ .], t– k– , ift∈[k+ ., k+ ],
and h(t) =h(t) – .,
h(t) =h(t) – .,
and consequently,
h(t) =max
≤i≤
hi(t)=h(t) and τ(t) =max ≤i≤
τi(t)
=τ(t).
It is easy to verify that
α=lim inf
t→∞ t
τ(t)
i=
pi(s)ds= .·lim inf k→∞
k+
k+
ds= .,
and therefore, the smaller root ofe.λ=λisλ
= ..
Observe that the functionFj: [,∞)→R+defined as
Fj(t) = t
h(t) P(s)exp
h(t)
τ(s)
P(u)exp
u
τ(u) Rj(ξ)dξ
du
ds
attains its maximum att= k+ .,k∈N, for everyj≥. Specifically,
F(t= k+ .) =
k+.
k+
P(s)exp k+
τ(s)
P(u)exp
u
τ(u) R(ξ)dξ
du
ds
with
R(ξ) =P(ξ)
+
ξ
τ(ξ)
P(v)exp
ξ
τ(v)
P(w)exp
w
τ(w)
λP(z)dz
dw
dv
By using an algorithm on MATLAB software, we obtain
F(t= k+ .).,
and so
lim sup
t→∞ F(t). > .
That is, condition (.) of Theorem is satisfied forj= , and therefore all solutions of (.) are oscillatory.
Observe, however, that
+p(ζ)a
k+ ,τ(ζ)
dζ
+ k+
k+
p(ζ)a
k+ ,τ(ζ)
+p(ζ)a
k+ ,τ(ζ)
+p(ζ)a
k+ ,τ(ζ)
dζ
+ k+.
k+
p(ζ)a
k+ ,τ(ζ)
+p(ζ)a
k+ ,τ(ζ)
+p(ζ)a
k+ ,τ(ζ)
dζ
.
and
G(t= k+ ) =
k+
k+
i= pi(ζ)a
k+ ,τi(ζ)
dζ
= k+
k+
p(ζ)a
k+ ,τ(ζ)
+p(ζ)a
k+ ,τ(ζ)
+p(ζ)a
k+ ,τ(ζ)
dζ
..
Thus
lim sup
t→∞
G(t). < ,
lim inf
t→∞ G(t). < /e,
and
. < –D(α)..
Also
k+.
k+
i= pi(ζ)a
h(ζ),τi(ζ)
dζ≤G(t= k+ .)..
Thus
lim sup
k→∞
k+.
k+
i= pi(ζ)a
h(ζ),τi(ζ)
dζ ≤. < +lnλ
λ
–D(α)..
Also
lim sup
t→∞
t
h(t) P(s)exp
h(t)
τ(s)
P(u)du
ds. < ,
lim sup
t→∞
t
h(t) P(s)exp
t
τ(s)
P(u)du
ds
=lim sup
k→∞
k+.
k+
P(s)exp
k+.
τ(s)
P(u)du
ds.
<
D(α)., lim sup
t→∞ t
h(t) P(s)exp
h(s)
τ(s)
P(u)du
ds
≤lim sup
t→∞ t
h(t) P(s)exp
h(t)
τ(s)
P(u)du
ds
. < +lnλ
λ
–D(α).,
lim inf
t→∞
t
h(t) P(s)exp
h(t)
τ(s)
P(u)du
ds. <
e.
That is, none of the conditions (.)-(.), (.)-(.) (forr= ) and (.)-(.) (for
j= ) is satisfied.
Comments It is worth noting that the improvement of condition (.) to the correspond-ing condition (.) is significant, approximately .%, if we compare the values on the left-hand side of these conditions. Also, the improvement compared to conditions (.) and (.) is very satisfactory, around .% and .%, respectively.
Finally, observe that conditions (.)-(.) do not lead to oscillation for the first itera-tion. On the contrary, condition (.) is satisfied from the first iteraitera-tion. This means that our condition is better and much faster than (.)-(.).
Remark Similarly, one can construct examples to illustrate the other main results.
Acknowledgements
The authors express their sincere gratitude to the editors and two anonymous referees for the careful reading of the original manuscript and useful comments that helped to improve the presentation of the results and accentuate important details. This research is supported by NNSF of P.R. China (Grant No. 61503171), CPSF (Grant No. 2015M582091), NSF of Shandong Province (Grant No. ZR2016JL021), DSRF of Linyi University (Grant No. LYDX2015BS001), and the AMEP of Linyi University, P.R. China.
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Both authors contributed equally to this work. They both read and approved the final version of the manuscript.
Author details
1Department of Electrical and Electronic Engineering Educators, School of Pedagogical and Technological Education
(ASPETE), N. Heraklio, Athens, 14121, Greece.2School of Information Science and Engineering, Linyi University, Linyi,
Shandong 276005, P.R. China.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Received: 29 May 2017 Accepted: 7 September 2017
References
2. Chatzarakis, GE: Differential equations with non-monotone arguments: iterative oscillation results. J. Math. Comput. Sci.6(5), 953-964 (2016)
3. Chatzarakis, GE: Oscillations caused by several non-monotone deviating arguments. Differ. Equ. Appl.9(3), 285-310 (2017)
4. Chatzarakis, GE, Péics, H: Differential equations with several non-monotone arguments: an oscillation result. Appl. Math. Lett.68, 20-26 (2017)
5. Erbe, LH, Kong, Q, Zhang, BG: Oscillation Theory for Functional Differential Equations. Dekker, New York (1995) 6. Erbe, LH, Zhang, BG: Oscillation for first order linear differential equations with deviating arguments. Differ. Integral
Equ.1(3), 305-314 (1988)
7. Fukagai, N, Kusano, T: Oscillation theory of first order functional differential equations with deviating arguments. Ann. Mat. Pura Appl.136(1), 95-117 (1984)
8. Hunt, BR, Yorke, JA: When all solutions ofx(t) = –qi(t)x(t–Ti(t)) oscillate. J. Differ. Equ.53(2), 139-145 (1984) 9. Jaroš, J, Stavroulakis, IP: Oscillation tests for delay equations. Rocky Mt. J. Math.29(1), 197-207 (1999)
10. Kon, M, Sficas, YG, Stavroulakis, IP: Oscillation criteria for delay equations. Proc. Am. Math. Soc.128(10), 2989-2997 (2000)
11. Koplatadze, RG, Chanturiya, TA: Oscillating and monotone solutions of first-order differential equations with deviating argument. Differ. Uravn.18(8), 1463-1465 (1982) (in Russian); 1472
12. Koplatadze, R, Kvinikadze, G: On the oscillation of solutions of first order delay differential inequalities and equations. Georgian Math. J.1(6), 675-685 (1994)
13. Kusano, T: On even-order functional differential equations with advanced and retarded arguments. J. Differ. Equ.
45(1), 75-84 (1982)
14. Kwong, MK: Oscillation of first-order delay equations. J. Math. Anal. Appl.156(1), 274-286 (1991)
15. Ladas, G, Lakshmikantham, V, Papadakis, JS: Oscillations of higher-order retarded differential equations generated by the retarded argument. In: Delay and Functional Differential Equations and Their Applications, pp. 219-231. Academic Press, New York (1972)
16. Ladas, G, Stavroulakis, IP: Oscillations caused by several retarded and advanced arguments. J. Differ. Equ.44(1), 134-152 (1982)
17. Ladde, GS: Oscillations caused by retarded perturbations of first order linear ordinary differential equations. Atti Accad. Naz. Lincei, Rend. Cl. Sci. Fis. Mat. Nat.63(5), 351-359 (1977)
18. Ladde, GS, Lakshmikantham, V, Zhang, BG: Oscillation Theory of Differential Equations with Deviating Arguments. Monographs and Textbooks in Pure and Applied Mathematics, vol. 110. Dekker, New York (1987)
19. Li, X, Zhu, D: Oscillation and nonoscillation of advanced differential equations with variable coefficients. J. Math. Anal. Appl.269(2), 462-488 (2002)
20. Myškis, AD: Linear homogeneous differential equations of the first order with retarded argument. Usp. Mat. Nauk
5(2(36)), 160-162 (1950) (in Russian)
21. Yu, JS, Wang, ZC, Zhang, BG, Qian, XZ: Oscillations of differential equations with deviating arguments. Panam. Math. J.
2(2), 59-78 (1992)
22. Zhang, BG: Oscillation of the solutions of the first-order advanced type differential equations. Sci. Explor.2(3), 79-82 (1982)
23. Zhou, D: On some problems on oscillation of functional differential equations of first order. J. Shandong Univ. Nat. Sci.