BIROn - Birkbeck Institutional Research Online
Chen, Taolue and Han, Tingting and Cao, Y. (2018) Polynomial-time
algorithms for computing distances of Fuzzy Transition Systems. Theoretical
Computer Science 727 , pp. 24-36. ISSN 0304-3975.
Downloaded from:
Usage Guidelines:
Please refer to usage guidelines at
or alternatively
Contents lists available atScienceDirect
Theoretical
Computer
Science
www.elsevier.com/locate/tcs
Polynomial-time
algorithms
for
computing
distances
of
fuzzy
transition
systems
Taolue Chen
a,
c,
Tingting Han
a,
∗
,
Yongzhi Cao
baDepartmentofComputerScienceandInformationSystems,Birkbeck,UniversityofLondon,UK
bKeyLaboratoryofHighConfidenceSoftwareTechnologies(MOE),SchoolofElectronicsEngineeringandComputerScience,Peking University,
Beijing 100871,China
cStateKeyLaboratoryforNovelSoftwareTechnology,Nanjing University,China
a
r
t
i
c
l
e
i
n
f
o
a
b
s
t
r
a
c
t
Articlehistory: Received26March2017
Receivedinrevisedform26February2018 Accepted1March2018
Availableonlinexxxx
CommunicatedbyR.vanGlabbeek
Keywords:
Fuzzytransitionsystems Fuzzyautomata Pseudo-ultrametric Algorithm
Behaviour distances to measure the resemblance of two states in a (nondeterministic) fuzzy transition system have been proposed recently in literature. Such a distance, de-fined as a pseudo-ultrametric over the state space of the model, provides a quantitative analogue of bisimilarity. In this paper, we focus on the problem of computing these dis-tances. We first extend the definition of the pseudo-ultrametric by introducing discount such that the discounting factor being equal to 1 captures the original definition. We then provide polynomial-time algorithms to calculate the behavioural distances, in both the non-discounted and the non-discounted setting. The algorithm is strongly polynomial in the former case.
©2018 The Authors. Published by Elsevier B.V. This is an open access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/).
1. Introduction
Fuzzyautomataandfuzzylanguagesarestandardcomputationaldevicesformodellinguncertaintyandimprecisiondue tofuzziness.Classicalfuzzyautomataaredeterministic,namely,wheninthecurrentstateandreadingasymbol,the automa-ton canonlymove toa uniquenext (fuzzy) state.In [4],Cao et al. arguedthat nondeterminism isessential formodelling certainaspectsofsystem, suchasschedulingfreedom,implementationfreedom,theexternalenvironment,andincomplete information.Hence,theyintroducednondeterminismintothemodeloffuzzyautomata,givingrisetonondeterministicfuzzy automata,ormoregenerally,(nondeterministic)fuzzytransitionsystems.
Ingeneral, systemtheory mainlyconcerns modellingsystems andanalysisoftheir properties.One ofthefundamental questionsstudiedinsystemtheoryisregardingthenotionofequivalence,i.e.,whencantwosystemsbedeemedthesame andwhen can they be inter-substitutedforeach other?In the classicalinvestigation in concurrencytheory, bisimulation, introducedbyParkandMilner[23],isaubiquitousnotionofequivalencewhichhasbecomeoneoftheprimarytoolsinthe analysisofsystems:whentwosystemsarebisimilar,knownpropertiesarereadilytransferredfromonesystemtotheother. However,itisnowwidelyrecognisedthattraditionalequivalencesarenotarobustconceptinthepresenceofquantitative (i.e. numerical) information in the model (see, e.g., [15]). Instead, it should come up with a more robust approach to distinguish systemstates.Toaccommodate this, researchershaveborrowedfrompure mathematicsthe notionofmetric. A metricisoftendefinedasafunctionthatassociatessomedistancewithapairofelements.Here,itisexploitedtoprovide ameasure ofthediscrepancybetweentwo statesthat arenot exactlybisimilar.Probabilisticsystemsandfuzzytransition
*
Correspondingauthor.E-mailaddresses:[email protected](T. Chen),[email protected](T. Han),[email protected](Y. Cao).
https://doi.org/10.1016/j.tcs.2018.03.002
systemsaretwotypicalexamplesofsystemsfeaturingquantitativenature.Forprobabilisticsystems,thenotionofdistance intermsofpseudo-metricshasbeenstudiedextensively(cf.therelatedwork). Forfuzzytransitionsystems,Caoet al. [5] proposed a similarnotionwhichserves asananalogue ofthoseinprobabilistic systems.Technically,a pseudo-ultrametric, insteadofapseudo-metric,wasadopted.WereferthereaderstoSection 2forformaldefinitions.
Havingaproperdefinitionofdistanceathand,thenextnaturalquestionis:howtocomputeitforagivenpairofstates? Thisraises somealgorithmicchallenges. Forprobabilistic systems,differentalgorithms havebeenprovidedforavarietyof stochastic models (cf. therelatedwork). However, to thebest ofour knowledge,little is knownasfor thecorresponding algorithms infuzzy transitionsystems. Indeed,in [5] this was left asan open problem, which isthe main focus of the currentpaper.
Ona differentmatter,discounting (or inflation)isafundamental notionineconomicsandhasbeenstudiedin,among others,Markovdecisionprocessesaswellasgametheory.Discountingrepresentsthedifferenceinimportancebetweenthe future valuesandthepresentvalues.Forinstance,assuming areal-valued discountfactor 0
<
γ
<
1.A unitpayoff is1if thepayoff occurstoday,butitbecomesγ
ifitoccurstomorrow,γ
2 ifitoccursthedayaftertomorrow,andsoon.Whenγ
=
1,thevalueisnotdiscounted.Discountinghasanaturalplaceinsystemengineering;asasimpleexample,a potential buginthefar-awayfutureislesstroublingthanapotentialbugtoday[11].Inotherwords,discountingmodelspreference forshortersolutions.Weintroducediscountingintothedistancedefinitionforfuzzytransitionsystems,asdoneinprobabilisticsystems[28]. This iscomplementarytothe definitiongivenin[5].Ina nutshell,whenmeasuringthe distancebetweentwo states,the distanceoftheirone-stepsuccessorsareatimeslessimportant,andthedistancebetweentheirtwo-stepsuccessorsarea2
timeslessimportant,etc.
Contributions.Themaincontributionsofthispaperareasfollows:
(1) Weextendthepseudo-ultrametricdefinitiongivenin[5] fornon-discountedsettingtothediscountedsetting;
(2) Wepresentpolynomial-timealgorithmstocomputethebehaviouraldistance,inbothnon-discounted(i.e.,theoriginal definitionin[5])anddiscountedsetting(definedinthecurrentpaper).
Some explanations are inorder.Regarding (1),remarkthatthe definitionin[5] isgivenin thenon-discountedsetting, wherethepresentdistancesandthedistancesinfutureareequallyweighted.Inoursetting,thediscountingwillbetaken into consideration. Regarding (2), the basicingredient ofour algorithms is the standard “value iteration” procedure à la Kleene (Kleene’sfixpointtheorem[22]).Toqualifyapolynomial-timealgorithm,weshow twofacts:(i) Foreach iteration, it only needs polynomial time.Note that accordingto thedefinitionof pseudo-ultrametric,each steprequires to solvea (non-standard)mathematicalprogrammingproblem(cf.Section2).Weshowthiscanbedoneinpolynomial-time.Thispart is identical forboth discountedandnon-discounted cases.(ii) The numberof iterations is polynomially bounded.Inthe non-discounted case, thisis done by inspecting the possiblevalues appearing ineach iteration. Forthe discountedcase, unfortunatelythisdoesnothold.Instead,ourstrategyistofirstlycomputeanapproximationofthesoughtvalue,andthen apply thecontinuedfractionalgorithmtoobtaintheprecisevalue.Tothebestofourknowledge,we arenotawareofany previousworkonpolynomialalgorithmsforcomputingbehaviourdistancesinfuzzytransitionsystems.
Fuzzy transition systems are known as possibilitysystems which are closely related to the probabilistic systems. Our algorithm and its analysisreveal some interesting difference betweenthese two types ofmodels, especially in the non-discountedcase.Indeed,theschemeusedinthepapercannotyieldapolynomial-timealgorithmfordiscrete-timeMarkov chains:Thereisanexplicitexampleshowingthatitmighttakeexponentiallymanyiterationstoreachthefixpoint;see[6]. As amatteroffact,fordiscrete-timeMarkovchains(which arethecounterpartofdeterministicfuzzytransitionsystems), polynomial-timealgorithms doexist,butone hastoappealtolinearprogramming[6]. This,however,doesnotprovidea strongly polynomial-timealgorithm.1 Evenworse, forMarkovdecisionprocesses (which arethe counterpartof nondeter-ministic fuzzytransitionsystems), thebest knownupper-bound isNP
∩
co-NP [18].2 In contrast,herewegive a stronglypolynomial-timealgorithmfor(nondeterministic)fuzzytransitionsystems.
Relatedwork.
Fuzzysystems,fuzzyautomataandfuzzytransitionsystems.Conventionally,fuzzysystemsare mainlyreferred toasfuzzyrule based systems where fuzzy states(outputs) evolve over time under some (maybe fuzzy) controls. In thispaper, we are mainlyinterested inatypeoffuzzysystemmodelswhicharebasedonfuzzyautomata[31].Typically,fuzzyautomataare considered to be acceptors offuzzy languages.However, forthe purposeof the currentpaper,we consider fuzzy transi-tion systems,whichare, ina nutshell,nondeterministicfuzzyautomatawithoutacceptingstates.Hence, wedisregard the languageaspectoffuzzyautomata,butfocusontheirdynamics.
Metricsonothertypesofsystems. Giacalone et al. [19] were the first to suggest a metric between probabilistictransition systemstoformalisethenotionofdistancebetweenprocesses.Subsequently,[15] studiedalogicalpseudometricforlabelled
1 Itisalong-standingopenproblemwhetherlinearprogrammingadmitsastronglypolynomial-timealgorithm.
Markovchains.A similarpseudometricwasdefinedin[30] viatheterminalcoalgebraofafunctorbasedonametriconthe spaceofBorelprobabilitymeasures.[16] dealtwithlabelledconcurrentMarkovchains.[13] consideredaslightlymoregeneral framework,calledaction-labelled quantitativetransitionsystems.Theydefinedapseudometricwhichwasanadaptationofthe onein[16].Furthermore[17] consideredpseudometricoverMarkovdecisionprocesseswithacontinuousstatespace. Algorithmsforcalculatingmetrics.Apartfromtheworkdiscussedabove,[29] gaveanapproximationalgorithmbasedonlinear programminganditeration.[28] proposedan algorithmforMarkovchains,basedonthefirst-ordertheory ofreals,which was extendedto simpleprobabilisticautomata in[7]. Thesealgorithms arenot optimal.[27] alsopresented analgorithm forcomputingdistancebetweenprobabilistic automata.However, theirdefinitionwas considerablydifferentfromwhatis widelyadoptedinliterature.
Equivalenceandmetricsinfuzzysystems. Relateto the fuzzytransitionsystems, differentnotions of bisimulation and sim-ulation have been introduced into traditional fuzzy automata [8,21], weighted automata [2], and quantitative transition systems[24]. ´Ciri´cet al. [9] proposedalgorithmstocomputetheserelations.Recently,DengandWu[14] providedamodal characterisationsof fuzzybisimulation. As an applicationoffuzzy bisimulation theory,DengandQiu [12] developedthe supervisorycontroloffuzzydiscrete-eventsystemsbasedonsimulationequivalence.Tothebestofourknowledge,thisis thefirstpapertostudy(polynomial)algorithmsofcomputingthedistancesbetweentwofuzzytransitionsystems.
Structureofthepaper.Thispaperissetupasfollows.InSection2,wepresentsomebackgroundknowledge.InSection3,4 and5weprovidetwopolynomial-timealgorithmsforthenon-discountedanddiscountedcase,respectively.Thecorrectness ofthealgorithmsisalsoshown.WeconcludeourworkinSection6.
2. Preliminaries
Wewrite
Q
forthesetofrationals.Let X be afiniteset.Afuzzysubset(orsimplyfuzzyset)of X isafunctionμ
:
X→
[
0,
1]
.Such functionsare calledmembershipfunctions;intuitively the valueμ
(
x)
capturesthedegree ofmembership ofx inμ
.A fuzzy(sub)setof X canbeusedtoformallyrepresentapossibilitydistributionover X.The support ofa fuzzy set
μ
isdefined asSupp(
μ
)
= {
x|
μ
(
x)
>
0}
.If Supp(
μ
)
isfinite, we adopt Zadah’snotation. Namely,assumingSupp(
μ
)
= {
x1,
x2,
...,
xn}
,wewriteμ
as:μ
=
μ
(
x1)x1
+
μ
(
x2) x2+ · · ·
μ
(
xn)
xn.
Wewrite
F
(
X)
andP
(
X)
forthesetofallfuzzysubsetsandthepowersetofX respectively.Foranyμ
,
η
∈
F
(
X)
,we saythatμ
iscontainedinη
(orη
containsμ
),denotedbyμ
⊆
η
,ifμ
(
x)
≤
η
(
x)
forallx∈
X.Notethatμ
=
η
ifbothμ
⊆
η
and
η
⊆
μ
.A fuzzysetμ
of X isemptyifμ
(
x)
=
0 foranyx∈
X.Weusuallywrite∅
fortheemptyfuzzyset. Foranyfamily{
λ
i}
i∈I ofelementsin[
0,
1]
,we writei∈I
λ
i or∨{
λ
i|
i∈
I}
forthesupremumof{
λ
i|
i∈
I}
,andcorre-spondingly
i∈Iλ
ior∧{
λ
i|
i∈
I}
fortheinfimum.Notethatif Iisfinite,i∈Iλ
iandi∈Iλ
iarethegreatestelementandtheleastelementof
{
λ
i|
i∈
I}
,respectively.Foranyμ
∈
F
(
X)
andU⊆
X,μ
(
U)
standsforx∈Uμ
(
x)
.2.1. Fuzzytransitionsystems
Definition1([5]).Afuzzytransitionsystem(FTS)isatuple
M
=
(
S,
A,
δ)
where•
Sisafinitesetofstates,•
A isafinitesetoflabels,•
δ
:
S×
A→
P
(
F
(
S))
isafuzzytransitionfunction.GivenanFTS
(
S,
A,
δ)
ands∈
S,a∈
A,we says−→
aμ
isafuzzytransitionifμ
∈
δ(
s,
a)
.AnFTSisfiniteifboth S and A are finite.Throughoutthis paper,we onlyconsider finiteFTSs. Let Act(
s)
= {
a∈
A|
∃
μ
∈
F
(
S),
s−→
aμ
}
be theset of actionsenabledinstate s.Belowweleveragetheexample,originallygivenin[5],toillustratetheFTS.
Example1.The FTS
M
is depictedinFig.1,where S= {
s1,
s2,
s3,
s4}
, A= {
a}
andthetransitionsare s1 a−→
μ
,s2a
−→
η
ands3 a
−→
ν
.Notethathereμ
=
0s.39+
0s.48,η
=
0s.36+
0s.49,andν
=
0s.49.2
Fig. 1.Fuzzy transition systemM.
||
X||
=
x∈X||
x||
,where||
x||
isthenumberofbitstoencodexinbinary(rationalnumbersarerepresentedasafraction). Obviously|
M
|
≤ ||
M
||
.We usethe standard notation r todenote thesmallest integergreater than orequal toa real numberr.Example2.Forthe FTS
M
inFig.1,|
M
|
=
4+
2+
2+
1=
9,as|
S|
=
4,|
Supp(
μ
)
|
= |
Supp(
η
)
|
=
2, and|
Supp(
ν
)
|
=
1. Whereas||
Supp(
μ
)
||
= ||
109||
+ ||
108||
=
log29+
log210+
log28+
log210=
15.Notethatherelog istobase2 and log29+
log210bitsareneededtoencode0.
9 inbinary.2
2.2. Behaviouralmetrics
Definition2.Let X beanonemptyset.A functiond
:
X×
X→ [
0,
1]
isapseudo-ultrametricon X ifforallx,
y,
z∈
X:1.d
(
x,
x)
=
0;2.d
(
x,
y)
=
d(
y,
x)
;and 3.d(
x,
z)
≤
d(
x,
y)
∨
d(
y,
z)
.The pair
(
X,
d)
is apseudo-ultrametricspace. Forsimplicitywe oftenwrite X insteadof(
X,
d)
.In thepaperwe only consider[
0,
1]
-valuedpseudo-ultrametrics.This,however,iswithoutlossofgenerality;see[3] fordiscussions.Let
D
(
S)
be theset ofall pseudo-ultrametricson S.Foranyd∈
D
(
S)
,we liftit toa pseudo-ultrametriconF
(
S)
,as follows.Definition3(Lifting).Letd
∈
D
(
S)
.Foranyμ
,
η
∈
F
(
S)
,ifμ
(
S)
=
η
(
S)
,wedefinedˆ
(
μ
,
η
)
=
1;otherwise,wedefinedˆ
(
μ
,
η
)
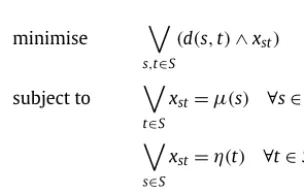
asthevalueofthefollowingmathematicalprogrammingproblem(MP):minimise
s,t∈S
(
d(
s,
t)
∧
xst)
(1)subject to
t∈S
xst
=
μ
(
s)
∀
s∈
S (2)s∈S
xst
=
η
(
t)
∀
t∈
S (3)xst
≥
0∀
s,
t∈
S (4)Itisshownin[3,Theorem 1] thatforeachd
∈
D
(
S)
,dˆ
isapseudo-ultrametriconF
(
S)
.Definition4.Wedefinetheorder
onD
(
S)
asd1
d2ifd1(
s,
t)
≤
d2(
s,
t)
for alls,
t∈
S.
Apartiallyorderedset
(
X,
≤
)
isacompletelatticeifeverysubsetof X hasasupremumandaninfimumin(
X,
≤
)
.Itcan be easily shownthat(
D
(
S),
)
isa completelattice, followingthesameargumentin [3,Lemma2],withthe supremum andinfimumgivenbys,t∈S,d∈D(S)d(
s,
t)
ands,t∈S,d∈D(S)d(
s,
t)
.Definition5.Let
(
X,
d)
beapseudo-ultrametricspace.Foranyx∈
X andY⊆
X,defined
(
x,
Y)
=
y∈Yd
(
x,
y),
ifY=
∅
1
,
otherwiseFurther,givenapairY
,
Z⊆
X,theHausdorffdistanceinducedbydisdefinedasHd
(
Y,
Z)
=
0
,
ifY=
Z=
∅
y∈Yd
(
y,
Z)
∨
z∈Zd(
z,
Y)
,
otherwiseItisshownin[3,Lemma3] that,ifdisapseudo-ultrametricon X,Hd isapseudo-ultrametricon
P
(
X)
.Example3.GivenFig.1,let Y
= {
s1,
s2}
⊆
S and Z= {
s3,
s4}
⊆
S. Thedistanced3 is definedasfollows: d3(
s1,
s3)
=
0.
92,d3
(
s1,
s4)
=
0.
83,d3(
s2,
s3)
=
0.
66,d3(
s2,
s4)
=
0.
75.As a result, d3(
s1,
Z)
=
min{
d3(
s1,
s3),
d3(
s1,
s4)
}
=
min{
0.
92,
0.
83}
=
0
.
83,andd3(
s2,
Z)
=
min{
d3(
s2,
s3),
d3(
s2,
s4)
}
=
min{
0.
66,
0.
75}
=
0.
66.Meanwhile,d3(
s3,
Y)
=
inf{
d3(
s3,
s1),
d3(
s3,
s2)
}
=
min
{
0.
92,
0.
66}
=
0.
66,andd3(
s4,
Y)
=
min{
d3(
s4,
s1),
d3(
s4,
s2)
}
=
min{
0.
83,
0.
75}
=
0.
75.TheHausdorffdistanceinducedbyd3isdefinedas
Hd3
(
Y,
Z)
=
max{
d3(s1,Z),
d3(s2,Z),
d3(s3,Y),
d3(s4,Y)
}
=
max{
0.
83,
0.
66,
0.
66,
0.
75} =
0.
83.
2
Note that anyd
∈
D
(
S)
induces a pseudo-ultrametric dˆ
onF
(
S)
which, in turn, yields a pseudo-ultrametric Hdˆ onP
(
F
(
S))
.Wearenowinapositiontodefineafunctionalon
D
(
S)
.Definition6.Thefunctional
γ
:
D
(
S)
→
D
(
S)
isdefinedasfollows.Foranyd∈
D
(
S)
,γ
(
d)
isgivenbyγ
(
d)(
s,
t)
=
γ
·
a∈AHdˆ
δ(
s,
a), δ(
t,
a)
foralls
,
t∈
S,whereγ
∈
(
0,
1]
isthediscountingfactor.Itisratherstraightforwardtocheckthat
γ
(
d)
∈
D
(
S)
by[3,Lemma3],whichmeansthatγ iswelldefined.Incase
γ
=
1,itisshownin[3,Lemma4] thatthefunctional1
:
D
(
S)
→
D
(
S)
ismonotonicwithrespecttothepartialorder. One canalso seethat thisholdsaswell in thecasethatγ
∈
(
0,
1)
.ByTarski’s fixpointtheorem [26],γ admitsa least fixpoint
γmingivenby
γmin
=
{
d∈
D
(
S)
|
γ
(
d)
d}
.
ThisiswhatweareafterasadistancemeasureonthepairsofstatesinanFTS.Notethat
Definition7.Let
(
S,
A,
δ)
beanFTSandγ
∈
(
0,
1]
bethediscountingfactor.Foranys,
t∈
S,thebehaviouraldistancebetween sandt,denoteddγf(
s,
t)
(f standsforfixpoint),isdefinedasdγf
(
s,
t)
=
γmin
(
s,
t).
Remark1.In[3],theorder
isdefinedinthereversedirectionasinDefinition4,i.e.,d1d2 ifd1(
s,
t)
≥
d2(
s,
t)
.Accord-ingly,dγf isdefinedasthegreatestfixpoint(asopposedtotheleastfixpoint here).Thisisusedtomimicthebisimulation whichiscommonlydefinedasthegreatestfixpointintheliterature.Neverthelessthesetwodefinitionsareequivalent.
Remark2(Discounting).Thetransitionscouldbewrittenass
−→
aμ
andt−→
aη
.Inotherwords,theone-stepsuccessorsof sandt arethedistributionsμ
andη
.Thedistancebetweensandt iscalculatedbytheHausdorffdistancebetweentheir one-stepsuccessors.Asitisonestepawayfromsandt,thecontributionofthedistancewillbediscountedbyγ
.3. Polynomialalgorithmsforcomputingdistances
Proposition1.Let
(
S,
A,
δ)
beanFTSandγ
bethediscountingfactor.Define(
γ)
0(
⊥
)
= ⊥
and(
γ)
n+1(
⊥
)
=
γ
[
(
γ)
n(
⊥
)
]
, where⊥
isgivenby⊥
(
s,
t)
=
0foralls,
t∈
S.Thendγf=
γmin
=
{
(
γ)
n(
⊥
)
|
n∈
N
}
.Proof. By Kleene’sfixpoint theorem, the leastfixpoint
γmin can be obtainedby iteration of
γ starting fromthe least element
⊥
(see, for example,[10]). As a result, to verify thatγmin
=
{
(
γ)
n(
⊥
)
|
n∈
N
}
,it suffices to show that the closure ordinalofγ,i.e., theleast ordinaln such that
(
γ)
n+1=
(
γ)
n, isatmostω
.Infact, forany(
s,
t)
∈
S×
S,if s−→
aμ
,then foreachdn=
(
γ)
n(
⊥
)
,thereexistsη
n suchthat ta
−→
η
n anddˆ
n(
μ
,
η
n)
≤
dn(
s,
t)
.Because theFTSunderthe complexity consideration is finite, which means that
δ(
t,
a)
is finite, there is anη
n, sayη
, such that t a−→
η
andˆ
dn
(
μ
,
η
)
≤
dn(
s,
t)
forallbutfinitelymanyn,asdesired.2
AsmentionedinSection1,Proposition1doesnotyieldanoutrightpolynomial-timealgorithm.Forourpurpose, essen-tiallyonehastoshowthat
(1) the(non-standard)mathematicalprogramming(MP)problemcanbesolvedinpolynomialtime;and (2) itonlyrequirespolynomiallymanyiterationstoreachthefixpoint.
In thesequel,wewillshow bothareindeedthecase. For(1),weshallpresentapolynomial-timealgorithmthat,givend ands
,
t∈
S,computesγ
(
d)(
s,
t)
=
γ
·
a∈AHdˆ
(δ(
s,
a), δ(
t,
a)).
Intuitively,
γ
(
d)(
s,
t)
isthenewdistance ofs andt afterapplying thefunctionalγ tofunction d(oneiteration). This suffices toshow thateach iteration
γ can bedone inpolynomial timeineithercase. For(2)it turnsout thatthe non-discountedanddiscountedcasedemanddifferentargumentswhichwewillprovideinSection4andSection5,respectively.
4. Thenon-discountedcase
Inthissection,we considerthenon-discountedcase,i.e.,
γ
=
1.We omitthesuperscript1of1 andsimply write
instead.
4.1. TheconstructionofanMPproblem
Westartwithsomesimpleobservations.Givenany
M
,wewrite M tobe{
μ
(
s)
|
s∈
S,
μ
∈
F
(
S)
} ∪ {
0,
1}
.
Clearly
|
M|
≤ |
M
|
.Intuitively, M isthesetofvaluesappearinginM
asdegreesofmembershipaswellas0 and1.Example4.GiventheFTS
M
inFig.1, M= {
0,
0.
6,
0.
8,
0.
9,
1}
.2
Thefollowinglemmahasbeenimpliedin[5,p. 738,Remark 1] andisratherstraightforward.Hencetheproofisomitted.
Lemma1.Let
(
d)(
s,
t)
=
a∈AHdˆ(δ(
s,
a),
δ(
t,
a))
,foranys,
t∈
S.Itholdsthat(
d)(
s,
t)
∈
M∪ {
d(
s,
t)
|
s,
t∈
S}
.Wenote thatthisobservationdoesnot holdinthediscountedcase. Owningtothisobservation, tocalculate
(
d)(
s,
t)
, we onlyneedtotestwhethereachmemberof M∪ {
d(
s,
t)
|
s,
t∈
S}
canbe attainedandtheleastattainedvalue isthe sought one. Hence we can reduce the optimisation problemto the feasibility testingof a systemof equationsof the followingform:
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
1≤i,j≤n
(
di j∧
xi j)
=
c(
∗
)
x11∨
x12· · · ∨
x1k1=
a1..
.
xm1
∨
xm2· · · ∨
xmkm=
am,
wherec
∈
M∪ {
d(
s,
t)
|
s,
t∈
S}
.Tothisend,wefirstrewriteEq.(
∗
)
as∨
Y=
c,
whereY= {
xi j|
di j≥
c}
,
(
∗∗
)
⎧
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎩
∨
Y=
c,
whereY= {
xi j|
di j≥
c}
x11∨
x12· · · ∨
x1k1=
a1..
.
xm1
∨
xm2· · · ∨
xmkm=
am(5)
BelowweleveragetheexampleFTSinFig.1toillustratetheconstruction.
Example5.Recallthathere
μ
=
0.9 s3+
0.8
s4 and
η
=
0.6s3
+
0.9s4.Inthisexample,weshow givend1 suchthat d1
(
i,
i)
=
0 for all i∈ {
1,
..,
4}
andd1(
i,
j)
=
1 for all i=
j and i,
j∈ {
1,
...,
4}
.Here, M∪ {
d(
s,
t)
|
s,
t∈
S}
= {
0,
0.
6,
0.
8,
0.
9,
1}
.In thisexample,wepickc
=
0.
6,andthesystemofequationsisasfollows:
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
i=jxi j
=
c=
0.
6x11
∨
x12∨
x13∨
x14=
0μ
(
s1)=
0 x21∨
x22∨
x23∨
x24=
0μ
(
s2)=
0 x31∨
x32∨
x33∨
x34=
0.
9μ
(
s3)=
0.
9 x41∨
x42∨
x43∨
x44=
0.
8μ
(
s4)=
0.
8 x11∨
x21∨
x31∨
x41=
0η
(
s1)=
0 x12∨
x22∨
x32∨
x42=
0η
(
s2)=
0 x13∨
x23∨
x33∨
x43=
0.
6η
(
s3)=
0.
6 x14∨
x24∨
x34∨
x44=
0.
9η
(
s4)=
0.
9(6)
Notethatsystemsofequationsforothervaluesofccanbeconstructedinthesameway.
2
4.2. Checkingfeasibility
Recallthatnowwehaveasystemofequations
(whichcanberewrittenas
).Ourtaskistocheckwhetherboth
and
arefeasible,i.e.,whetherthereexistsasolutiontomake
and
hold.
Lemma2.
isfeasibleiff
isfeasible.
Proof. Itis toshow that
(
∗
)
and(
∗∗
)
are equivalent. Werewrite(
∗
)
assup1≤i,j≤n{
(
di j∧
xi j)
}
=
c. Forall 1≤
i,
j≤
n, ifdi j
<
c,thendi j∧
xi j<
c.Asaresult,this(
di j∧
xi j)
isnotcontributingtosup1≤i,j≤n{
(
di j∧
xi j)
}
=
c andcanberemoved.2
GivenLemma2,itremainstoshowhowtocheckthefeasibilityofasystemofequations
oftheform
⎧
⎪
⎪
⎨
⎪
⎪
⎩
x11
∨
x12· · · ∨
x1k1=
a1..
.
xm1
∨
xm2· · · ∨
xmkm=
amForthispurpose,weconstructavaluationforxi (1
≤
i≤
n)asxi
=
min{
a|
ais the RHS of an equationπ
ofs.t.xi,joccurs in
π
}
Thefollowinglemmaplaysavitalrole.Inother words,inordertocheckthefeasibilityof
,itsufficestocheckwhether
x
=
(
xi)
1≤i≤n isasolutionof.Thiscanbedoneinlineartime. Lemma3.
isfeasibleiffx
=
(
xi)
1≤i≤nisasolutionof.
Proof. The“if”partisobviousandwewillfocuson the“onlyif”part.Fixany1
≤
i≤
m.Bythedefinitionofx,we have that, foreach 1≤
j≤
ki, xi j=
min{
a|
xh=
xi j for some 1≤
h≤
k}
.Clearly ai∈ {
a|
xh=
xi j for some 1≤
h≤
k}
,and thuswehavethatxi j≤
ai.Itfollowsthatxi1
∨
xi2· · · ∨
xiki≤
ai.
Since
is feasible,theremustexista solutionx of
.Foreach 1
≤
i≤
n,xi≤
a withxh=
xi forsome1≤
h≤
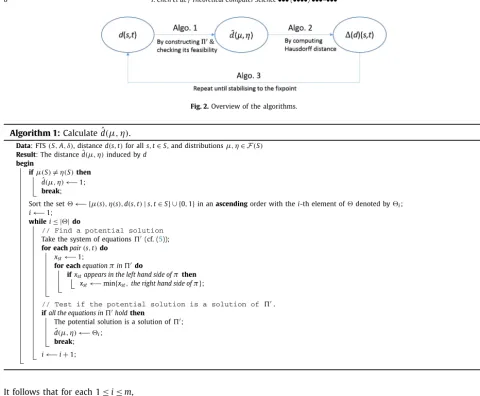
k. ConsequentlyFig. 2.Overview of the algorithms.
Algorithm 1:Calculated
ˆ
(
μ
,
η
)
.Data: FTS(S,A,δ),distanced(s,t)foralls,t∈S,anddistributionsμ,η∈F(S)
Result: Thedistancedˆ(μ,η)inducedbyd begin
ifμ(S)=η(S)then
ˆ
d(μ,η)←−1; break;
Sorttheset ←− {μ(s),η(s),d(s,t)|s,t∈S}∪ {0,1}inanascendingorderwiththei-thelementof denotedby i;
i←−1; whilei≤ | |do
// Find a potential solution Takethesystemofequations(cf. (5)); for eachpair(s,t)do
xst←−1;
for eachequationπindo
ifxstappearsinthelefthandsideofπthen
xst←−min{xst,the right hand side ofπ};
// Test if the potential solution is a solution of . ifalltheequationsinholdthen
Thepotentialsolutionisasolutionof;
ˆ
d(μ,η)←− i;
break;
i←−i+1;
Itfollowsthatforeach1
≤
i≤
m,ai
=
xi1∨
xi2· · · ∨
xik1≤
xi1∨
xi2· · · ∨
xik1≤
ai Namely,xisasolutionof.
2
4.3. Thealgorithms
Based ontheresultsinSection 4.1and4.2,wespecifythreealgorithmshere.As illustratedinFig.2,giventhecurrent d
(
s,
t)
Algorithm1computesdˆ
(
μ
,
η
)
.TheresultsactastheinputforAlgorithm2,whichcalculatestheupdatedd(
s,
t)
,i.e.,(
d)(
s,
t)
.InAlgorithm3,itrepeatstheprocedureuntilafixpointisreached.WewillcontinuewithExample5toshowhowtocalculated
ˆ
1(
μ
,
η
)
.Example6(Continued).According to the algorithm,
= {
0,
0.
6,
0.
8,
0.
9}
. The algorithm will start from 1=
0. It turnsout thisis not a feasible solution.We will proceed to check 2
=
0.
6. As a result, we obtain a potential solution x33=
min
{
0.
9,
0.
6}
=
0.
6,x34=
min{
0.
6,
0.
9,
0.
9}
=
0.
9,x44=
min{
0.
8,
0.
9}
=
0.
8,x43=
min{
0.
6,
0.
8,
0.
6}
=
0.
6 andxi j=
0 foralltherestvariablesxi j.
Now wetestwhetherthepotential solutionisreallyasolutionof
inEq. (6).Thisisdonebysubstitutingthevalues backtoEq. (6).Itisclearthatx31
∨
x32∨
x33∨
x34=
0.
9,but0∨
0∨
0.
6∨
0.
6=
0.
6=
0.
9.Sothispotentialsolutionisnotasolutionof
.
The algorithm proceedsby checkingthe next candidate 3
=
0.
8, whichturns out not to be a solution ofeither.
It thenchecks 4
=
0.
9.Here,we havex33=
min{
0.
9,
0.
6}
=
0.
6, x34=
min{
0.
9,
0.
9,
0.
9}
=
0.
9, x44=
min{
0.
8,
0.
9}
=
0.
8,x43
=
min{
0.
9,
0.
8,
0.
6}
=
0.
6 andalltherestxi j=
0.Thispotential solutionis indeedasolutionof.Wethenconclude
thatthedistancebetween
μ
andη
inducedbyd1 isdˆ
1(
μ
,
η
)
=
0.
9.2
Algorithm 2:Calculate
(
d)(
s,
t)
.Data: FTS(S,A,δ),ands,t∈S,distancefunctiond Result:(d)(s,t)
begin
ifAct(s)=Act(t)then(d)(s,t)=1; else
//computeHausdorffdistancebycallingAlgo.1
Hdˆ(δ(s,a), δ(t,a))=
η∈δ(t,a)μ∈δ(s,a)
ˆ
d(μ,η) μ∈δ(s,a)η∈δ(t,a)
ˆ
d(μ,η);
//compute(d)(s,t)bytakingthesupremumamongallactions:
(d)(s,t)=a∈Act(s)Hdˆ(δ(s,a),δ(t,a));
Lemma2andLemma3giveriseto:
Proposition2.Algorithm2computes,foreachd,
(
d)
inpolynomialtime.We remark that this is actually a strongly polynomial-time algorithm. In the literature, strongly polynomial time is definedinthearithmeticmodelofcomputation.Inthismodel,thebasicarithmeticoperations(addition,subtraction, multi-plication,division,andcomparison)takeaunittimesteptoperform,regardlessofthesizesoftheoperands.Thealgorithm runsinstronglypolynomialtime [20] if(1) thenumberofarithmeticoperationsisboundedbyapolynomial in
|
M
|
;and (2) thespaceusedbythealgorithmisboundedbyapolynomialin||
M
||
.Inourcase,onecaneasilyverify(1)and(2)hold forAlgorithm2.Algorithm 3 is the main procedure to compute d1f
(
s,
t)
by an iteration ofstarting from the leastelement
⊥
. The correctness ofthe algorithm follows fromProposition 2, whichalso asserts that each iteration requires polynomial time only.Henceitsufficestoshowthatonlypolynomialnumberofiterationsarenecessarytoterminatethealgorithm.Algorithm 3:Calculated1f.
Data: FTS(S,A,δ)
Result: Thebehaviouraldistancematrixd1 f
begin n←−0; d0←− ⊥; repeat
Dl←−dn;
for eachpair(s,t)do
dn+1(s,t)←−(dn)(s,t);// Call Algo. 2
D←−dn+1;
n←−n+1; until Dl=D;
d1 f=D;
ThefollowinglemmacanbeobtainedbyinductionandLemma1.
Lemma4.Given
M
=
(
S,
A,
δ)
,itholdsthatd1f
(
s,
t)
∈
Mforanys,
t∈
S.Thefollowingpropositionshowsonlypolynomialnumberofiterationsarenecessarytoterminatethealgorithm.
Proposition3.TheiterationinAlgorithm3needsatmostpolynomiallymanysteps.
Proof. We assume that n
∈
N
is the smallest n such that dn(
s,
t)
=
dn+1(
s,
t)
. Due to Lemma 4, di(
s,
t)
∈
M, for anyi
∈ [
0,
n]
.Notethat eachdi isofdimension|
S|
2,andthus thevalueofeach entrydst mustbein M.Moreover,asis
monotonic,di+1
≤
di.Itfollowsthatn≤ |
M|
· |
S|
2,whichispolynomialinthesizeofM
.2
Weconcludethissectionbythefollowingtheorem,whichcanbeeasilyshownbyProposition2and3.
Theorem1.Givenafuzzytransitionsystem
M
,andtwostatess,
t,d15. Thediscountedcase
Inthissection,weconsiderthediscountedcase,i.e.,
γ
<
1.Firstweremarkthatonecannot(atleastnotina straight-forward manner) follow the same approach asin Proposition 3 to obtain a polynomial-time algorithm, simply because Lemma 4failswhenγ
<
1.Instead, ourstrategy is tofirst comeup withan approximation algorithm, which,givenany>
0,computesadsuchthat||
d−
dγf||
≤
.Itturnsoutthatsuchanapproximationcanbeidentifiedbyapplyingatmost logγ
iterations.Inthesequel,weconsiderthe
∞
-normforvectors,i.e.,||
d1−
d2||
=
maxs,t∈S|
d1(
s,
t)
−
d2(
s,
t)
|
.Wefirstshowthat
isacontractionmapping.Thefollowingisasimpletechnicalfact.
Lemma5.Foranyz1
,
z2,
t∈
R
,itholdsthatmin(
z1,
t)
−
min(
z2,
t)
≤ |
z1−
z2|
.Proof. Observethatmin
(
z,
t)
=
|
z+
t| − |
z−
t|
2 .Itthenfollowsthat min
(
z1,t)
−
min(
z2,t)
=
|
z1+
t| − |
z1−
t| + |
z2−
t| − |
z2+
t|
2
≤
|
(
z2−
t)
−
(
z1−
t)
| + |
(
z1+
t)
−
(
z2−
t)
|
2
= |
z1−
z2|
.
2
Forsimplicity,given
μ
andη
,wewriteUμ,ηforthesetof{
xuv}
u,v∈S suchthat⎧
⎪
⎨
⎪
⎩
v∈Sxuv
=
μ
(
u)
∀
u∈
Su∈Sxuv
=
η
(
v)
∀
v∈
Sxuv
≥
0∀
u,
v∈
SLemma6.Foranyd
,
d:
S×
S→ [
0,
1]
,itholdsthat||
γ
(
d)
−
γ
(
d)
|| ≤
γ
· ||
d−
d||
.
Proof. Bydefinition,
||
γ
(
d)
−
γ
(
d)
|| =
maxs,t∈S
|
γ
(
d)(
s,
t)
−
γ
(
d)(
s,
t)
|
.
Fixtwostatessandt.Wehavethefollowing:
|
γ
(
d)(
s,
t)
−
γ
(
d)(
s,
t)
|
= |
γ
·
a∈A
Hdˆ
(δ(
s,
a), δ(
t,
a))
−
γ
·
a∈AHd
(δ(
s,
a), δ(
t,
a))
|
≤
γ
· |
Hdˆ(δ(
s,
a∗), δ(
t,
a∗))
−
Hd(δ(
s,
a∗), δ(
t,
a∗))
|
[
wherea∗=
arg maxa∈A Hdˆ
(δ(
s,
a), δ(
t,
a))
]
≤
γ
· |ˆ
d(
μ
∗,
η
∗)
− ˆ
d(
μ
∗,
η
∗)
|
[
where(
μ
∗,
η
∗)
=
argHdˆ(δ(
s,
a∗), δ(
t,
a∗))
]
=
γ
· |
min
x∈Uμ∗,η∗
u,v∈S
(
d(
u,
v)
∧
xuv)
−
min
x∈Uμ∗,η∗
u,v∈S
(
d(
u,
v)
∧
xuv)
|
≤
γ
· |
u,v∈S
(
d(
u,
v)
∧
yuv)
−
u,v∈S
(
d(
u,
v)
∧
yuv)
|
[
wherey=
arg min
x∈Uμ∗,η∗
u,v∈S
(
d(
u,
v)
∧
xuv)
]
≤
γ
· |
d(
u∗,
v∗)
∧
yu∗v∗−
d(
u∗,
v∗)
∧
yu∗v∗|
[
where(
u∗,
v∗)
=
arg max≤
γ
· |
d(
u∗,
v∗)
−
d(
u∗,
v∗)
| [
By Lemma5]
≤
γ
· ||
d−
d||
Namely,foranys
,
t∈
S,|
γ
(
d)(
s,
t)
−
γ
(
d)(
s,
t)
| ≤
γ
· ||
d−
d||
.
Asaresult,
||
γ
(
d)
−
γ
(
d)
|| =
maxs,t∈S
|
γ
(
d)(
s,
t)
−
γ
(
d)(
s,
t)
| ≤
γ
· ||
d−
d||
.
2
Lemma6revealsthat
γ isacontractionmapping,hencebytheBanachfixpointtheorem[1],dγf isnotonlytheleast, butalsotheuniquefixpointof
γ.
Corollary1.GivenanyFTS
M
withdiscountingfactorγ
∈
(
0,
1)
,letN=
loglogγ.Then||
(
γ)
N(
d0)
−
dγf||
≤
.
Proof. First,observethat
||
γ
(
d)
−
dγf||
≤
γ
· ||
d−
dγf||
,whichfollowsfromLemma6andthefactthatγ
(
dγf)
=
dγf. Byinduction,wehave||
(
γ)
n(
d0)−
dγf|| ≤
γ
n· ||
d0−
dγf||
.
Hence
||
(
γ)
N(
d0)
−
dγf|| ≤
γ
N· ||
d0−
dγf|| ≤
γ
N≤
.
2
Algorithm 4:Calculatedγf.
Data: FTS(S,A,δ),errorbound,discountingfactorγ Result: Theapproximatebehaviouraldistancedγf begin
N←− loglogr;
d0←− ⊥;
n←−0; repeat
for eachpair(s,t)do
dn+1(s,t)←−γ·(dn)(s,t);// Call Algo.2
D←−dn+1;
n←−n+1; untiln>N; dγf=D;
Corollary 1 states that
(
γ)
N(
d0)
approximates dγf up to. This result is essentially a corollary of Banach fixpoint
theorem.Italsogivesastronglypolynomialapproximation algorithmuptoanyprecision
,asshowninAlgorithm4.This isalmostsufficientforpracticalconsiderations. Theoreticallyappealing,bythestandardcontinuedfractionalgorithm[20], wecancomputetheexact dγf inpolynomialtimeaswell.Forthispurpose,weneedthefollowinglemma:
Lemma7.For
γ
∈
(
0,
1)
,dγf isarationalvectorofsizepolynomialin||
M
||
and||
γ
||
.Proof. Forsimplicitywewritedfordγf.Bydefinition,dmustsatisfy
d
(
s,
t)
=
γ
· ˆ
d(
μ
,
η
)
forsomea
∈
A,μ
∈
δ(
s,
a)
,andη
∈
δ(
t,
a)
.Namelyd
(
s,
t)
=
γ
·
u,v∈S(
d(
u,
v)
∧
xu,v)
⎧
⎪
⎨
⎪
⎩
v∈Sxuv
=
μ
(
u)
∀
u∈
Su∈Sxuv
=
η
(
v)
∀
v∈
S xuv≥
0∀
u,
v∈
STheclaimhencefollowsfrombasiclinearalgebra.
2
Theorem2.Forafixed
γ
,d canbecomputedexactlyinpolynomialtimein||
M
||
.Proof. ByTheorem1,wecanfinddγf inpolynomialtimein
M
andavectorthatis
-closetodγf.AndbyLemma7,dγf isarationalvectorofsizepolynomialin
M
.Sowecanusethecontinuedfractionalgorithm[20,Chapter 5] tocompute dinpolynomialtime,asisillustratedin[6].2
We remark that, unfortunately,the exact polynomial-timealgorithm isnot strongly polynomial,as continuedfraction algorithmisused.Itisanopen questionwhetheronecanobtainanexactstronglypolynomial-timealgorithm.Asafuture work,wewouldimplementthealgorithmsandprovideexperimentalresultstoshowiftheyworkwellinpractice.
6. Conclusion
Wehavestudiedthealgorithmicaspectofbehaviouraldistanceforfuzzytransitionsystems.Thepseudo-ultrametric de-finedin[5] wasextendedtoaccommodateboththediscountedandnon-discountedsettings.Wethenprovided polynomial-timealgorithmstocalculatethebehaviouraldistanceinbothcases.
Acknowledgements
TaolueChenispartiallysupportedbyEPSRCgrant(EP/P00430X/1),ARCDiscoveryProject(DP160101652,DP180100691), andtheNationalNaturalScienceFoundation ofChina(GrantNo. 61662035).TingtingHanispartiallysupportedbyEPSRC grant(EP/P015387/1).YongzhiCaoissupportedbyNationalNaturalScienceFoundationofChina(GrantNo.61772035and 61751210).
References
[1]S.Banach,Surlesopérationsdanslesensemblesabstraitsetleurapplicationauxéquationsintégrales,Fund.Math.3(1922)133–181. [2]P.Buchholz,Bisimulationrelationsforweightedautomata,Theoret.Comput.Sci.393 (1–3)(2008)109–123.
[3]Y.Cao,G.Chen,E.E.Kerre,Bisimulationsforfuzzy-transitionsystems,IEEETrans.FuzzySyst.19 (3)(2011)540–552. [4]Y.Cao,Y.Ezawa,Nondeterministicfuzzyautomata,Inform.Sci.191(2012)86–97.
[5]Y.Cao,S.X.Sun,H.Wang,G.Chen,Abehavioraldistanceforfuzzy-transitionsystems,IEEETrans.FuzzySyst.21 (4)(2013)735–747.
[6]D.Chen,F.vanBreugel, J.Worrell,Onthe complexityofcomputingprobabilisticbisimilarity,in:L. Birkedal(Ed.),FoSSaCS,in:LectureNotesin ComputerScience,vol. 7213,Springer,2012,pp. 437–451.
[7]T.Chen,T.Han,J.Lu,Onmetricsforprobabilisticsystems:definitionsandalgorithms,Comput.Math.Appl.57 (6)(2009)991–999. [8]M.´Ciri´c,J.Ignjatovi ´c,N.Damljanovi ´c,M.Baši ´c,Bisimulationsforfuzzyautomata,FuzzySetsandSystems186 (1)(2012)100–139.
[9]M. ´Ciri´c,J.Ignjatovi ´c,I.Janˇci ´c,N.Damljanovi ´c,Computationofthegreatestsimulationsandbisimulationsbetweenfuzzyautomata,FuzzySetsand Systems208(2012)22–42.
[10]B.Davey,H.Priestley,IntroductiontoLatticesandOrder,CambridgeMathematicalTextBooks,CambridgeUniversityPress,2002.
[11]L.deAlfaro,T.A.Henzinger,R.Majumdar,Discountingthefutureinsystemstheory,in:J.C.M.Baeten,J.K.Lenstra,J.Parrow,G.J.Woeginger(Eds.),ICALP, in:LectureNotesinComputerScience,vol. 2719,Springer,2003,pp. 1022–1037.
[12]W.Deng,D.Qiu,Supervisorycontroloffuzzydiscrete-eventsystemsforsimulationequivalence,IEEETrans.FuzzySyst.23 (1)(Feb2015)178–192. [13]Y.Deng,T.Chothia,C.Palamidessi,J.Pang,Metricsforaction-labelledquantitativetransitionsystems,Electron.NotesTheor.Comput.Sci.153 (2)
(2006)79–96.
[14]Y. Deng,H. Wu,Modalcharacterisationsofprobabilisticand fuzzybisimulations,in:FormalMethodsand SoftwareEngineering,Springer, 2014, pp. 123–138.
[15]J.Desharnais,V.Gupta,R.Jagadeesan,P.Panangaden,MetricsforlabelledMarkov processes,Theoret.Comput.Sci.318 (3)(2004)323–354. [16]J.Desharnais,R.Jagadeesan,V.Gupta,P.Panangaden,Themetricanalogueofweakbisimulationforprobabilisticprocesses,in:LICS,IEEEComputer
Society,2002,pp. 413–422.
[17]N.Ferns,P.Panangaden,D.Precup,BisimulationmetricsforcontinuousMarkov decisionprocesses,SIAMJ.Comput.40 (6)(2011)1662–1714. [18]H.Fu,ComputinggamemetricsonMarkov decisionprocesses,in:A.Czumaj,K.Mehlhorn,A.M.Pitts,R.Wattenhofer(Eds.),ICALP(2),in:Lecture
NotesinComputerScience,vol. 7392,Springer,2012,pp. 227–238.
[19]A.Giacalone,C.-C.Jou,S.A.Smolka,Algebraicreasoningforprobabilisticconcurrentsystems,in:Proc.ofIFIPWG2.2/2.3,PCM’90,1990,pp. 453–459. [20]M.Grotschel,L.Lovasz,A.Schrijver,GeometricAlgorithmsandCombinatorialOptimization,AlgorithmsandCombinatorics,Springer-Verlag,1993. [21]I.Janˇci ´c,Weakbisimulationsforfuzzyautomata,FuzzySetsandSystems249(2014)49–72.
[22]S.C.Kleene,IntroductiontoMetamathematics,North-Holland,1952. [23]R.Milner,CommunicationandConcurrency,PrenticeHall,1989.
[24]H.Pan,Y.Li,Y.Cao,Lattice-valuedsimulationsforquantitativetransitionsystems,Internat.J.Approx.Reason.56(2015)28–42. [25]R.T.Rockafellar,R.J.-B.Wets,VariationalAnalysis,Springer-Verlag,2005.
[26]A.Tarski,Alattice-theoreticalfixpointtheoremanditsapplications,PacificJ.Math.5(1955)285–309.
[28]F.vanBreugel,B.Sharma,J.Worrell,Approximatingabehaviouralpseudometricwithoutdiscountforprobabilisticsystems,Log.MethodsComput.Sci. 4 (2)(2008).
[29]F.vanBreugel,J.Worrell,Analgorithmforquantitativeverificationofprobabilistictransitionsystems,in:K.G.Larsen,M.Nielsen(Eds.),CONCUR,in: LectureNotesinComputerScience,vol. 2154,Springer,2001,pp. 336–350.
[30]F.vanBreugel,J.Worrell,Abehaviouralpseudometricforprobabilistictransitionsystems,Theoret.Comput.Sci.331 (1)(2005)115–142.