2017 International Conference on Computer, Electronics and Communication Engineering (CECE 2017) ISBN: 978-1-60595-476-9
Research on Clock Bias-based RAIM Algorithm in BDS/GPS Dual-system
Jiu-yuan GUO
*and Xiao-lin ZHANG
No. 37 Xueyuan Road, Beihang University, Haidian District, Beijing, China *Corresponding author
Keywords: Receiver autonomous integrity monitoring, Clock bias, Satellite navigation, Fault detection, Fault identification.
Abstract. Clock bias prediction model is established in this paper based on the characteristics of BDS/GPS dual-system, so faulty satellite can be better detected and identified by applying clock bias prediction value into pseudorange equation. Experiments have proved the robustness of this algorithm because fault detection and identification rate is not reduced by additional redundant information in the condition of sufficient available satellites; meanwhile, fault detection and identification rate is significantly improved in the condition of insufficient available satellites.
Introduction
Receiver autonomous integrity monitoring (RAIM) algorithm mainly solves two problems: faulty satellite detection and identification. In 1988, Brown proposed RAIM algorithm using maximum solution separation [1]. However, mathematical analysis process of this algorithm is complex, and fault detection threshold is difficult to be determined. Thereafter, domestic and international scholars have carried out extensive research on RAIM algorithm, and put forward methods such as Least Square Residuals [2], Optimal Parity Vector Algorithm [3], etc. However, in harsh environment such as canyons, dense forests and areas surrounded by high-rise buildings, insufficient available satellites reduce the availability of RAIM algorithm [4]. Barometer, inertial navigation parameters or receiver clock bias are usually adopted to improve RAIM algorithm availability. Comparatively, clock bias-based algorithm is more flexible, more economical and more convenient. Different clock bias prediction models have been proposed to assist RAIM algorithm [5, 6, 7]. However, these algorithms are mainly applicable to single system receiver, and multi-system navigation has become a trend with the development of GPS, BDS, GLONASS and Galileo satellite navigation systems. BDS/GPS dual-system is most widely used in China, combining GPS, which has the greatest number of users, and BDS, which is constructed independently by China. Based on the characteristics of BDS/GPS dual-system, a new clock bias-based RAIM algorithm is presented in this paper.
Clock Bias Prediction Model
Two clock bias exist in BDS/GPS dual-system: BDS clock bias dtBDS and GPS clock bias dtBDS. The
clock of two systems can be unified in BDS/GPS dual-system [8]:
GPS BDS+( 0 1 k)
dt dt A A t (1) In Eq. 1, tk represents epoch, A0 and A1 are parameters of the equation. Establish the following equation based on Eq. 1:
0 1
( ) 0 0 0 1 1 T
k GPS BDS
A A t dx dy dz dt dt e (2) In Eq. 2, dx,dy,dz represent correction values of estimated position, e represents clock bias prediction error.
0 1
( )
0 0 0 T
k
GPS BDS
e e e e
A A t e
dx dy dz dt dt
(3)
[image:2.612.101.510.58.623.2]In Eq. 3, and e represent root mean square error of
and e respectively. [image:2.612.91.516.78.357.2]Figure 1. c t Curve of measurement.
Figure 2. c t after curve fitting.
Figure 3. Curve fitting error.
t
[image:2.612.104.500.124.265.2]Experiments show that the error is stable between -3 meters and 2 meters. Fig. 2 shows the result of curve fitting and Fig. 3 shows curve fitting error.
Clock Bias-Based RAIM Algorithm
Clock bias-based RAIM algorithm includes availability judgement of the algorithm, pseudorange equation expansion, faulty satellite detection and identification.
1. Pseudorange equation expansion
When the number of available satellites is N, pseudorange equation of BDS/GPS dual-system is:
yHx (4) In Eq. 4,
is pseudorange error. It is Gauss distribution with zero as mean value and
as standard variance. Pseudorange vector y, observation matrix H and vector to be estimated x are defined as follows:1 2 N y y y y
1 1 1
2 2 2
1 1 1 1 1 1 1 1 N N N a b c
a b c H
a b c
GPS BDS dx dy x dz dt dt
Pseudorange equation can be expanded:
yH x (5)
In Eq. 5, ( 0 1 k)
e y
y A A t
, 0 0 0
e e
H
H
, e e .
2. Faulty satellite detection
Based on the expanded pseudorange equation, the least square residual vector can be obtained:
T
1 Tv y H H H H y
(6) In Eq. 6, vector v contains pseudorange deviation of faulty satellite, which can detect faulty satellite. The sum of squared residuals is:
= T v v
(7) Compare
with detection threshold: If
is greater than detection threshold, faulty satellite exists; otherwise, there is no faulty satellite.3. Faulty satellite identification
If a faulty satellite exists, it is identified by maximum likelihood estimation method based on Eq. 8:
/ , 1
i i ii
w v U i N
(8)
ii
U represents diagonal element of matrix U I H H H
T
1HT. If the statistics wi of certain satellite is the largest, this satellite is identified to be faulty.4. Availability judgement
Max
HPL
HDOP
(9)Max HDOP
is maximum horizontal accuracy factor,
is noncentral chi-square distribution parameter. Compare HPL value with threshold value HAL to determine the availability of RAIM algorithm. When HPLHAL, RAIM algorithm is not available; otherwise, it is available.Experiment
To evaluate detection and identification performance of this algorithm in different conditions: different faulty satellite numbers or different fault degrees, faulty satellite numbers and different fault degrees are set, and Monte Carlo simulation is conducted for 10 thousand times using clock bias-based RAIM algorithm and RAIM algorithm without the assistance of clock bias respectively in BDS/GPS dual-system. Different available satellite numbers are set in this experiment: 9, 13, 15, 19, 21 and 23. In fault detection function, false alarm rate setting is 10 /-5
[image:4.612.152.459.331.523.2]h and
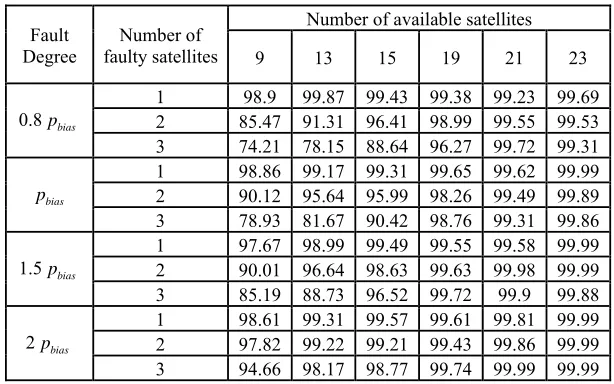
6m referring to the requirements of ICAO (the International Civil Aviation Organization). Regarding fault degrees, when fault bias is less than critical bias pbias, undetected rate exceeds allowable value; and when satellite number and false alarm rate is determined, pbias is determined [9]. Therefore, the fault degree applied in the simulation adopts pbias as a reference. Simulation results are shown in Table 1 and Table 2.Table 1. Fault detection and identification rate(%) using clock bias-based RAIM algorithm.
Fault
Degree faulty satellites Number of
Number of available satellites
9 13 15 19 21 23
0.8pbias
1 98.9 99.87 99.43 99.38 99.23 99.69 2 85.47 91.31 96.41 98.99 99.55 99.53 3 74.21 78.15 88.64 96.27 99.72 99.31
bias
p
1 98.86 99.17 99.31 99.65 99.62 99.99 2 90.12 95.64 95.99 98.26 99.49 99.89 3 78.93 81.67 90.42 98.76 99.31 99.86
1.5pbias
1 97.67 98.99 99.49 99.55 99.58 99.99 2 90.01 96.64 98.63 99.63 99.98 99.99 3 85.19 88.73 96.52 99.72 99.9 99.88
2pbias
1 98.61 99.31 99.57 99.61 99.81 99.99 2 97.82 99.22 99.21 99.43 99.86 99.99 3 94.66 98.17 98.77 99.74 99.99 99.99
Table 1 shows that when there is only one faulty satellite, fault detection and identification rate of both clock bias-based RAIM algorithm and RAIM algorithm without assistance of clock bias is more than 99% in most cases. The condition of multi-satellite fault detection and identification indicates that the overall rate is also very high. When fault bias is not less than critical bias, the rate is more than 90% except for few conditions of insufficient available satellites. The fault detection and identification rate even exceeds 99% especially when satellite number is more than 20, close to the rate of single satellite. However, even if fault bias is small and less than the critical bias, the rate has reached more than 88% in the condition of sufficient available satellites (not less than 15). As a result, this algorithm has good robustness.
Table 2. Fault detection and identification rate(%) using RAIM algorithm without assistance of clock bias.
Fault
Degree faulty satellites Number of
Number of available satellites
9 13 15 19 21 23
0.8
bias
p
1 96.13 99.03 99.33 99.21 99.51 99.56 2 78.78 90.41 95.18 99.12 99.43 99.43 3 70.31 77.12 87.96 95.67 97.64 99.49
bias
p
1 96.12 99.51 99.17 99.43 99.75 99.56 2 83.16 94.67 93.79 99.61 99.87 99.99 3 72.19 79.98 88.67 98.99 99.85 99.99 1.5
bias
p
1 97.54 98.67 99.12 99.59 99.56 99.87 2 85.87 96.19 96.31 99.73 99.69 99.99
3 80.13 85.54 94.62 99.8 99.99 99.99
2pbias
1 99.31 99.22 99.37 99.62 99.8 99.99 2 95.21 99.31 98.89 99.51 99.87 99.99 3 92.83 98.86 98.68 99.67 99.99 99.99
Figure 4. Clock bias-based RAIM algorithm.
Figure 5. RAIM algorithm without clock bias assistance.
Summary
This paper proposes clock bias-based RAIM algorithm in BDS/GPS dual-system, using clock bias prediction value to increase system redundancy. The algorithm has been proved to have the following advantages from experiment results: in the condition of sufficient available satellites, fault identification rate is basically the same with the result of RAIM algorithm without clock bias assistance. Since the result is not influenced by additional redundant information, the proposed algorithm has good robustness; in the condition of insufficient available satellites, this algorithm is more sensitive to fault than traditional algorithm. It reduces fully-identified deviation threshold and improves fault identification rate; for BDS/GPS dual-system, traditional algorithm realizes faulty satellite detection by minimum 6 available satellites, and identification by minimum 7 available satellites. However, clock bias-based RAIM algorithm can realize faulty satellite detection and identification by minimum 5 and 6 available satellites respectively, which improves the availability of RAIM algorithm.
Acknowledgement
This research was financially supported by the National Science Foundation (91438116).
References
[1] Brown R.G., Mcburney P.W. Self-contained GPS integrity check using maximum solution separation, J. Journal of the Institute of Navigation. 1988, 35(1): 41-54.
[2] Ni Junjie, Zhu Yongxin, Guo Wei. An Improved RAIM Scheme for Processing Multiple Outliers in GNSS, C. 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW07). 2007: 840-845.
[3] Yang Jing, Zhang Hongyue. Satellite Fault Diagnosis Based On Optimal Parity Vector Method, J. Acta Aeronautica Et Astronautica Sinica. 2001, 23(2): 183-186.
[4] Teng Yunlong, Shi Yibing, Guo Chengjun. Research on RAIM augmented with clock bias prediction model based on grey theory, J. Journal of Electronic Measurement And Instrument. 2010, 24(3): 257-262.
[5] Huang Jixun, Zhou Lixuan, Fan Yuezu. General RAIM Algorithm Based on Aiding of Receiver Clock Bias, J. Journal of Beijing University of Aeronautics and Astronautics. 2001, 27(2): 161-163. [6] Xu Longxia, Li Xiaohui. A Receiver Clock Bias-Based GPS RAIM Algorithm, J. Journal of Astronautics. 2011, 32(3): 537-542.
[7] Chen Xiaoping, Teng Yunlong, Xu Hongbing. Research on Receiver Autonomous Integrity Monitoring Augmented with Clock Bias Model, J. 2009, 30(1): 271-275.
[8] Tang Yan, Zhang Xiaolin, Hou Bing, Li Juan. Positioning Algorithm of COMPASS/GPS in the Case of Four Available Satellites, J. Journal of Telemetry, Tracking and Command. 2012, 33(4): 13-19.