Approximating the Bayesian decision b oundary for
channel equalisation using subset
Radial Basis Function network
E.S CHNG 1
, B. MULGREW 2
, S. CHEN 3
and G. GIBSON 4
1
Lab. for Artificial Brain. FRP. RIKEN. 2-1 Hirosawa, Wako-shi,
Saitama 351-01, JAPAN. E-mail: [email protected]
2
Dept. of Electrical Eng., The University of Edinburgh, U.K.
3
Dept. of E.E.E., The University of Portsmouth,U.K.
4
Biomathematics and Statistics, The University of Edinburgh, U.K.
Theaimofthispap eristoexaminetheapplicationofradialbasisfunction(RBF)
networkto realisethedecisionfunctionofasymb ol-decisionequaliserfordigital
communicationsystem. Thepaperrst study the Bayesianequaliser'sdecision
functiontoshowthatthedecisionfunctionisnonlinearandhasastructure
iden-tical to the RBF mo del. To implement the full Bayesian equaliserusing RBF
networkhoweverrequiresvery largecomplexitywhich isnot feasiblefor
practi-calapplications. Toreducethe implementationcomplexity,weprop oseamo del
selectiontechnique to choose the imp ortantcentres of the RBFequaliser. Our
resultsindicatethatreduced-sizedRBFequalisercanb efoundwithnosignicant
degradationinp erformanceifthesubsetmo delsareselectedappropriately.
Keywords: RBFnetwork,Bayesianequaliser,neuralnetworks.
1 Introduction
Thetransmissionofdigitalsignalsacrossacommunicationchannelissubjectedto
noiseandintersymbolinterference(ISI).Atthereceiver,theseeectsmustb e
com-p ensatedtoachievereliabledatacommunications[1,2]. Thechannel,consistingof
thetransmissionlter,transmissionmediumandreceiverlter,ismo delledasa
-niteimpulseresponse(FIR)lterwithatransferfunctionH(z)= P
n
a 01
i=0 a(i)z
0i
.
The eects on the randomly transmitted signal s(k ) = s = f61g through the
channelis describ edby
r (k )=^r(k)+n(k )= na01
X
i=0
where r (k) is the corrupted signal of s(k) received by the equaliser at sampled
instanttime k, ^r(k ) is thenoise-free observed signal, n(k ) is the additive
Gaus-sian white noise, a(i) are the channel impulse resp onse co ecients, and n
a is
the channel's memory length[1, 2]. Using a vector of the noisy received signal
r(k)=[r (k);111;r(k0m+1)] T
, the equaliser's task is to reconstruct the
trans-mitted symb ol s(k0d) with the minimum probabilityof mis-classication, P
E .
Theintegersm and dareknownasthe feedforwardand delayorder resp ectively.
The measure of an equaliser's p erformance P
E
, ormore commonly expressed as
thebiterrorrate (BER),BER= log
10 P
E
,incommunicationliterature [1],is
ex-pressedwithresp ect tothesignaltonoiseratio(SNR) wheretheSNR isdened
by
SNR=
E[^r(k)]
E[n 2
(k)] =
2
s (
P
i=n
a 01
i=0
a(i) 2
)
2
e
= P
i=n
a 01
i=0
a(i) 2
2
e
(2)
where 2
s
=1is thetransmit symbolvarianceand 2
e
is thenoisevariance.
The transmitted symbols that aect the input vector r(k) is the transmit
sequence s(k )=[s(k );111;s(k0m0n
a +2]
T
. Thereare N
s =2
m+na01
p ossible
combinationsof these inputsequences, i.e. fs
j
g;1jN
s
[2]. In theabsenceof
noise,thereareN
s
corresp ondingreceivedsequences^r
j
(k);1jN
s
,whichare
referredtoas channel states. The valuesof thechannelstatesaredened by,
c
j =
^
r
j
(k )=F[s
j
]; 1j N
s
; (3)
wherethematrix F 2R
m2(m+n
a 01)
is
F = 2
6
6
6
6
4
a(0) a(1) ::: a(n
a
01) 0 ::: ::: ::: ::: 0
0 a(0) a(1) ::: a(n
a
01) 0 ::: ::: ::: 0
.
.
. .
.
. .
.
. ::: ::: ::: ::: ::: ::: 0
0 ::: ::: ::: ::: ::: a(0) a(1) ::: a(n
a 01)
3
7
7
7
7
5
(4)
Duetotheadditivenoise,theobservedsequencer(k) conditionedonthechannel
state^r(k )=c
j
isa multi-variableGaussian distributionwithmean atc
j ,
p(r(k )jc
j
)=(2 2
e )
0m=2
exp(0kr(k )0c
j k
2
=(2 2
e
)): (5)
Thesetofchannelstates C
d =fc
j g
N
s
j=1
canb edividedintotwosubsetsaccording
tothevalueof s(k0d), i.e.
C (+)
d
=f^r(k)js(k0d)=+1)g; (6)
C (0)
d
=f^r(k )js(k0d)=01)g; (7)
wherethesubscript din C
d
is based on determining the maximum a posteriori probability P(s(k 0d) =
sjr(k))[2] givenobservedvector r(k ), i.e.,
^
s(k0d)=sgn( P(s(k0d)=+1jr(k))0P(s(k0d)=01jr(k)) ) (8)
where ^s(k0d) is the estimated value of s(k0d). It has b een shownin [2] that
theBayesiandecision functioncanbe reduced tothefollowingform,
f
b
(r(k ))= X
c
j 2C
(+)
d
exp(0kr(k)0c
j k
2
=(2 2
e ))0
X
c
k 2C
(0)
d
exp(0kr(k )0c
k k
2
=(2 2
e )) (9)
Itisthereforeobviousthatf
b
(:)hasthesamefunctionalformastheRBFmo del[2,
3]f
rbf (r),
f
rbf (r)=
N
X
i=1 w
i
(kr0c
i k
2
=) (10)
where N is the number of centres, w
i
are the feedforward weights, (:) are the
nonlinearity,c
i
arethecentresof theRBFmo del,and isaconstant. The RBF
networkistherefore idealtomodeltheoptimalBayesianequaliser [2].
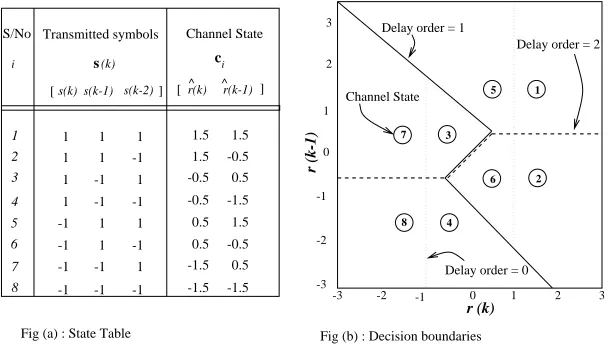
Example of decision boundary
Asanexample,theBayesiandecisionb oundariesrealisedbyaRBFequaliserwith
feedforwardorder m =2 for channel H(z) = 0:5+1:0z 01
is considered. Fig 1a
lists all the8 p ossible combinationsof the transmitted signal sequence s(k ) and
the corresp onding channel states c
i
. Fig. 1b depicts the corresponding decision
b oundaries for the dierent delay orders. Note that the decision b oundary is
dep endentonthe channelstatep ositions and delayorderparameter.
2 Selecting subset RBF mo del
The implementation of the full RBF Bayesian equaliser requires the use of all
N
s
channel states. Such implementation however may be impractical if N
s is
large. In some cases, the complexity may b e reduced by using a subset of the
N
s
channel states to generate the RBF decision function. For example, it is
obvious that the decision b oundary using delay d = 1 for H(z) (Fig. 1b) can
b e realised approximatelyby a RBF network using fc
3 ;c
4 ;c
5 ;c
6
g ascentres. If
therealised decision b oundaryusing thesubset RBF equaliser is verysimilar to
the full Bayesian equaliser, the classication performance of the two equalisers
wouldalso be very similar. That is, the implementation complexity of the RBF
equaliser is reduced by using only the imp ortant channelstates that dene the
decisionboundary.
To understand how centres aect decision boundary, we analyse the eects
-1
1
1
-1
-1
1
-1
-1
1
1
-1
1
-1
0.5
-0.5
0.5
-0.5
1.5
1.5
-1.5
-1.5
1.5
-1.5
-0.5
0.5
1.5
-0.5
0.5
-1.5
c
i
1
-1
1
7
2
1
^
8
5
6
3
4
3
2
1
0
-1
-2
-3
-3
-2
-1
0
1
2
3
Delay order = 0
Delay order = 1
Delay order = 2
r (k)
r (k-1)
Transmitted symbols
s(k) s(k-1)
s(k-2)
r(k)
r(k-1)
S/No
i
-1
1
-1
1
1
1
-1
-1
1
2
3
4
5
8
6
7
Fig (a) : State Table
Channel State
Channel State
Fig (b) : Decision boundaries
s
(k)
[
[
]
^
]
Figure1: (a)Transmitsequencesand channelstatesfor channelH(z),
(b)Corresponding Bayesiandecision boundariesforvariousdelayorders.
b oundary p oints. I.e.,f
b (r
0
)equals to0. Therefore, ifr(k )2r
0
,Eq. 9becomes
X cj2C (+) d exp(0kr 0 0c j k 2 =(2 2 e ))= X c k 2C (0) d exp(0kr 0 0c k k 2 =(2 2 e )): (11) When e
!0, thesum on thel.h.s. of Eq. 11 becomesdominated bythe closest
centrestor
0 ,i.e.
fU +
d
g = min
c j 2C (+) d fkr 0 0c j kg: (12)
Thisisbecausethecontributionfromtheterms exp(0kr
0 0c j k 2 =(2 2 e
))forcentres
c j = 2U + d
convergesmuchmorequicklytozerowhen
e
!0thantermsforcentres
b elongingtoU +
d
. Similarly,thesumonther.h.sof Eq.11b ecomesdominatedby
theclosesttermsforcentresb elongingtoU 0
d
,whereU 0 d =min c k 2C (0) d fkr 0 0c k kg.
Atveryhigh SNR,theasymptotic decisionboundaries arehyper-planesb etween
pairsofchannelstatesbelonging tofU +
d
gand fU 0
d g[4].
However,notallchannelstatesoffU +
d ;U
0
d
garerequiredtodenethedecision
b oundary. This canb eobservedfrom theexampleillustratedinFig. 1bfor
deci-sionb oundaryrealisedusingdelayorderd=2. Byvisualinsep ection(Fig.1b),it
isobvious thatfc
3 ;c
7 g2U
+ d and fc 4 ;c 8 g2U
0
d
. Thedecision b oundaryformed
usingcentres fc
3 ;c
4
g andfc
7 ;c
8
gare howeverthesame. Therefore,inthis case,
only1pairofchannelstates,eitherfc
3 ;c
4 gorfc
7 ;c
8
[image:4.595.167.472.172.345.2]To nd theset of imp ortantcentres fU +
ds ;U
0
ds
gforthe subsetRBF equaliser,
weprop osethe followingalgorithm,
Algorithm 1 : FindingU +
ds ;U
0
ds
Forc
j 2C
(+)
d
Forc
k 2C
(0)
d
r 3
j;k =c
j +(
c
k 0c
j
2 )
if 2
6
4 f
b (r
3
j;k
)=0 and
c
j =min
c
i 2C
(+)
d fkr
0 0c
i kgand
f
s (r
3
j;k )6=0
3
7
5
c
j !U
+
ds ,c
k !U
0
ds
next c
k ,
nextc
j .
wheref
s
(:) =RBF mo delformed using the current selectedchannelstates from
fU +
ds ;U
0
ds
gascentresand f
b
(:) isthefull RBFBayesianequaliser'sdecision
func-tion.
2.1 Subset modelselection : some simulation results
Simulationswere conductedtoselect subsetRBF equalisersfrom the fullmodel.
The following channels which have the same magnitude but dierent phase
re-sp onsewereused,
H1(z) = 0:8745+0:4372z 01
00:2098z 02
(13)
H2(z) = 0:262000:6647z 01
00:6995z 02
(14)
The feedforward order used was m = 4, resulting in a full mo del with N
s =
2
m+na01
=64centres. UsingSNRconditionat16dB,simulationswereconducted
to compare the p erformance of the subset RBF and full RBF equalisers for the
two channels. The results are tabulated in Table 1a and 1b resp ectively; The
rstcolumnof eachtableindicatesthedelayorderparameter,thesecondcolumn
indicates the number of channel states selected to form the subset mo del while
thethird and fourthcolumns listtheBERp erformance ofthetwoequalisersand
thelastcolumnindicatesifthechannelstatesbelongingtothedierenttransmit
symbol, i.e. C (+)
d
and C (0)
d
, are linearly or not-linearly separable. Our results
showthat reduced size RBF equaliser with p erformance very similar to the full
mo del'sp erformancecanusuallyb efoundforequalisationproblemthatislinearly
-4.14
-4.12
-4.12
-1.91
log(Pe)
-4.09
-0.97
56
57
32
32
48
64
Subset
Size
-4.11
-1.91
Subset
-4.11
log(Pe)
-4.09
-4.14
-0.97
Linear Sep.
Linear Sep.
Not-Linear Sep.
Decision
Not-Linear Sep.
Boundary
Linear Sep.
Not-Linear Sep.
Linear Sep.
Linear Sep.
Linear Sep.
Not-Linear Sep.
Decision
Not-Linear Sep.
Boundary
[image:6.595.145.496.168.341.2]Linear Sep.
Full-model
Table b : Channel H2(z)
0
1
2
3
4
5
Delay
Table a : Channel H1(z)
0
1
2
3
4
5
Delay
56
64
Subset
Size
Subset
log(Pe)
Full-model
log(Pe)
46
38
56
55
-0.80
-2.99
-3.38
-3.43
-3.32
-3.41
-1.30
-2.99
-3.38
-3.43
-3.32
-3.41
Table 1: Comparing thep erformance of the full-size (64centres) RBF equaliser,
subset RBF equaliser for Channel H1(z) (Table 1a)and Channel H2(z) (Table
1b)atSNR=16db.
3 Conclusions
This pap er examined the application of RBF network for channel equalisation.
It was shown that the optimum symbol-decision equaliser can b e realised by a
RBFmo delifchannelstatisticisknown. Thecomputationalcomplexityrequired
toimplement the full Bayesianfunction using the RBF network is however
con-siderable. Toreduce implementation complexity,a metho d of mo del selection to
reduce the number of centres in the RBF mo del is proposed. Our results
indi-cate that the mo del size, and hence implementation complexity,canbe reduced
withoutsignicantly compromisingclassication performanceinsomecases.
References
[1] S.U.H.QURESHI, \Adaptive equalization", Proc. IEEE, vol. 73,no. 9, pp. 1349{1387,
1985.
[2] S.CHEN, B.MULGREW,and P.M.GRANT, \A clustering techniquefor digital
commu-nicationschannelequalizationusingradialbasisfunctionnetworks", IEEE Trans.Neural
Networks, vol.4,no.4,pp.570{579, 1993.
[3] M.J.D.POWELL, \Radial basisfunctions formultivariableinterpolation: a review",
Al-gorithms for Approximation, pp. 143{167, J.C.MASON and M.G.COX (Eds), Oxford,
1987.
[4] R.A.ILTIS, \A randomized bias technique for the imp ortance sampling simulation of