Contents lists available atScienceDirect
Digital
Signal
Processing
www.elsevier.com/locate/dsp
1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
66 132
Introducing
anisotropic
tensor
to
high
order
variational
model
for
image
restoration
Jinming Duan
a,
Wil
O.C. Ward
a,
Luke Sibbett
a,
Zhenkuan Pan
b,
Li Bai
aaSchoolofComputerScience,UniversityofNottingham,UK
bSchoolofComputerScienceandTechnology,QingdaoUniversity,China
a
r
t
i
c
l
e
i
n
f
o
a
b
s
t
r
a
c
t
Articlehistory: Available online xxxx
Keywords: Total variation Hessian Frobenius norm Anisotropic tensor ADMM
Fast Fourier transform
Secondordertotalvariation(SOTV)modelshaveadvantagesforimagerestorationovertheirfirstorder counterparts includingtheir ability to remove the staircase artefact in the restored image. However, such models tend to blur the reconstructedimage whendiscretised for numerical solution [1–5].To overcome thisdrawback,weintroduceanew tensorweighted secondorder(TWSO)modelfor image restoration. Specifically, wedevelop anovel regulariser for the SOTV model that uses the Frobenius normoftheproductoftheisotropicSOTVHessianmatrixandananisotropictensor.Wethenadaptthe alternatingdirectionmethodofmultipliers(ADMM)tosolvetheproposedmodelbybreakingdownthe original problemintoseveral subproblems.Allthesubproblems have closed-formsand canbe solved efficiently. The proposed methodis comparedwith state-of-the-art approaches such as tensor-based anisotropic diffusion,totalgeneralisedvariation,and Euler’s elastica.We validatethe proposed TWSO model usingextensiveexperimentalresultsonalarge numberofimagesfrom theBerkeleyBSDS500. We alsodemonstrate thatour methodeffectively reduces boththe staircaseand blurring effects and outperformsexistingapproachesforimageinpaintinganddenoisingapplications.
©2017TheAuthor(s).PublishedbyElsevierInc.ThisisanopenaccessarticleundertheCCBYlicense (http://creativecommons.org/licenses/by/4.0/).
1. Introduction
Anisotropicdiffusion tensor can be usedto describe the local geometryatanimage pixel,thus makingit appealingforvarious imageprocessingtasks
[6–13]
.Variationalmethodsalloweasy in-tegrationofconstraintsanduseofpowerfulmodern optimisation techniquessuch asprimal–dual [14–16], fast iterative shrinkage-thresholding algorithm [17,18], and alternating direction method ofmultipliers[2–4,19–24]
.Recent advances onhow to automati-callyselectparametersfordifferentoptimisationalgorithms[16,18,
25]dramaticallyboostperformanceofvariationalmethods,leading toincreasedresearchinterestinthisfield.As such, the combination of diffusion tensor and variational
methodshas beeninvestigatedby researchers forimage
process-ing.KrajsekandScharr
[7]
developedalinearanisotropic regular-isationtermthat formsthe basisofa tensor-valuedenergyfunc-tional for image denoising. Grasmair and Lenzen [8,9] penalised
imagevariationbyintroducingadiffusiontensorthatdependson thestructuretensoroftheimage.RoussousandMaragos
[10]
de-velopedafunctionalthatutilisesonlyeigenvaluesofthestructuretensor. Similar work by Lefkimmiatis et al. [13] used
Schatten-E-mailaddress:zkpan@qdu.edu.cn(Z. Pan).
norm ofthestructure tensor eigenvalues.Freddie etal.proposed a tensor-basedvariationalformulationforcolourimage denoising [11],whichcomputesthestructure tensorwithoutGaussian con-volutionto allowEuler-equation ofthe functionaltobe elegantly derived.Theyfurtherintroduceda tensor-basedfunctionalnamed thegradientenergytotalvariation
[12]
thatutilisesboth eigenval-uesandeigenvectorsofthegradientenergytensor.However, theseexistingworksmentioned aboveonly consider
thestandardfirstordertotalvariation(FOTV)energy.Adrawback oftheFOTVmodelisthatitfavourspiecewise-constantsolutions. Thus, it can create strong staircase artefacts in the smooth
re-gionsoftherestoredimage.AnotherdrawbackoftheFOTVmodel
is its use of gradient magnitude to penalise image variations at
pixel locations x, which uses less neighbouring pixel
informa-tion as compared to high order derivatives in a discrete space.
As such, the FOTV has difficulties inpainting images with large
gaps.Highordervariationalmodelsthuscanbeappliedtoremedy these side effects. Among these is the second order total varia-tion(SOTV)model
[1,2,22,26,27]
.Unlikethehighordervariational models,such asthe Gaussiancurvature[28]
,meancurvature[23, 29],Euler’selastica[21]
etc.,theSOTVisaconvexhighorder ex-tensionoftheFOTV,whichguaranteesaglobalsolution.TheSOTV isalsomoreefficienttoimplement[4]
thantheconvextotal gen-eralisedvariation(TGV)[30,31]
.However,theinpaintingresultsofhttp://dx.doi.org/10.1016/j.dsp.2017.07.001
1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
66 132
themodelhighlydependonthegeometryoftheinpaintingregion, anditalsotendstoblurtheinpaintedarea
[2,22]
.Further, accord-ing to the numerical experimental results displayed in [1–5] the SOTVmodeltendstoblurobjectedgesforimagedenoising.In this paper, we propose a tensor weighted second order
(TWSO) variational model for image inpainting and denoising.
A novel regulariser has been developed for the TWSO that uses
theFrobeniusnorm oftheproduct oftheisotropicSOTVHessian
matrixandananisotropictensor,sothattheTWSOisanonlinear anisotropic high order model which effectively integrates
orien-tationinformation. In numerous experiments, we found that the
TWSO can reduce the staircase effect whilst improve the sharp
edges/boundariesofobjects inthedenoisedimage. Forimage
in-paintingproblems,theTWSO modelisabletoconnectlargegaps
regardlessof thegeometryof theinpainting region andit would
notintroducemuch blurtothe inpaintedimage. Astheproposed
TWSOmodelisbasedonthevariationalframework,ADMMcanbe
adaptedtosolvethemodelefficiently.Extensivenumericalresults
showthat thenewTWSO modeloutperformsthestate-of-the-art
approachesforbothimageinpaintinganddenoising.
The contributions ofthe paper are twofold:1) a novel
aniso-tropic nonlinear second order variational model is proposed for
image restoration. To thebest of our knowledge,this is thefirst timetheFrobeniusnormoftheproductoftheHessianmatrixand a tensorhasbeenused asa regulariserfor variationalimage de-noisingandinpainting;2)AfastADMMalgorithmisdevelopedfor
image restoration based on a forward-backward finite difference
scheme.
Therest ofthepaperis organisedasfollows:Section 2
intro-duces the proposed TWSO model and the anisotropic tensor T;
Section 3 presents the discretisation of the differential operators
used for ADMM based on a forward-backward finite difference
scheme; Section 4 describes ADMM for solving the variational
model efficiently. Section 5 gives details of the experiments
us-ingtheproposedTWSOmodelandthestate-of-the-artapproaches
forimageinpaintinganddenoising.Section6concludesthepaper.
2. TheTWSOmodelforimagerestoration
2.1. TheTWSOmodel
In
[26]
, theauthors considered the followingSOTV model forimageprocessing
min
u
η
2
u−
f2
2
+ ∇
2u1
,
(2.1)where
η
>
0 isaregularisationparameter.∇
2uisthesecondorder Hessianmatrixoftheform∇
2u=
∂
x∂
xu∂
y∂
xu∂
x∂
yu∂
y∂
yu,
(2.2)and
∇
2u1 in(2.1)
isthe FrobeniusnormoftheHessianmatrix(2.2).Byusingsuch norm,(2.1)hasseveralcapabilities:1)
allow-ingdiscontinuityofgradientsofu;2)imposingsmoothnessonu; 3)satisfyingtherotation-invariant property.Thoughtthishigh or-der model(2.1)isableto reduce thestaircaseartefactassociated withtheFOTVforimagedenoising,itcanblurobjectedgesinthe image [1–4]. For inpainting, asinvestigated in
[2,22]
,though the SOTVhastheabilitytoconnectlargegapsintheimage,such abil-itydependsonthe geometryofthe inpaintingregion, anditcan blurtheinpainted image.Inordertoremedythesesideeffectsinbothimage inpainting anddenoising, wepropose a moreflexible
andgeneralisedvariationalmodel,i.e.,thetensorweightedsecond
order(TWSO)modelthattakesadvantagesofboththetensorand
the second order derivative. Specifically, the TWSO model is
de-finedas
min
u
η
p
1(
u−
f)
p
p
+
T∇
2u1
,
(2.3)where p
∈ {
1,
2}
denotes the L1 and L2 data fidelity terms (i.e. 1(
u−
f)
1 and 1(
u−
f)
22), andis a subset of
(i.e.
⊂
⊂
R2).Forimageprocessingapplications,theisnormally
a rectangle domain. For image inpainting, f is the given image
in
=
\
D,where D⊂
is theinpainting region withmissing
ordegraded information.Thevaluesof f ontheboundariesof D
needtobepropagatedintotheinpaintingregionviaminimisation
of theweighted regularisationtermof theTWSO model.For
im-age denoising, f is thenoisy image and
=
.In thiscase, the
choiceofpdependsonthetypeofnoisefoundin f,e.g. p
=
2 for Gaussiannoisewhilep=
1 forimpulsivenoise.In the regularisation term
T∇
2u1 of (2.3), T is a symmet-ric positive semi-definite 2×
2 diffusion tensor whose four com-ponents are T11, T12, T21,and T22. They are computedfrom the inputimage f.Itisworthpointingoutthattheregularisationterm T∇
2u1 istheFrobeniusnormofa2by2tensorTmultipliedby a2by2Hessianmatrix
∇
2u,whichhastheformofT11
∂
x∂
xu+
T12∂
x∂
yu T11∂
y∂
xu+
T12∂
y∂
yu T21∂
x∂
xu+
T22∂
x∂
yu T21∂
y∂
xu+
T22∂
y∂
yu,
(2.4)where thetwo orthogonaleigenvectors ofT spantherotated
co-ordinate systeminwhichthegradientoftheinputimage is
com-puted. Assuch Tcan introduceorientations tothebounded
Hes-sianregulariser
∇
2u1.Theeigenvaluesofthetensormeasurethe degree ofanisotropy in the regulariser and weight the four sec-ond order derivatives in
∇
2u inthe two directions given by the eigenvectors of thestructure tensor introduced in [32]. It should be noting that the original SOTV (2.1) is an isotropic nonlinear modelwhiletheproposedTWSO(2.3)
isananisotropic nonlinear one. Asa result,the newtensorweighted regulariser T∇
2u1 is powerfulforimage inpainting anddenoising, asillustrated inthe experimental section. In the next section, we shall introduce the derivationofthetensorT.
2.2. Tensorestimation
In [32],the authordefined the structure tensor Jρ ofan
im-ageu
Jρ
(
∇
uσ)
=
Kρ∗
(
∇
uσ⊗ ∇
uσ) ,
(2.5) where Kρ isaGaussiankernelwhosestandarddeviationisρ
and∇
uσ is the smoothed version of the gradient convolved by Kσ. The useof(
∇
uσ⊗ ∇
uσ)
:= ∇
uσ∇
uTσ asa structure descriptoris to make Jρ insensitiveto noise butsensitive to changein orien-tation. The structure tensor Jρ is positive semi-definite and has two orthonormal eigenvectors v1||
∇
uσ (in the directionof gra-dient) and v2||
∇
uσ (in the directionof the isolevellines). The correspondingeigenvaluesμ
1 andμ
2 canbecalculatedfromμ
1,2=
1 2
j11
+
j22±
(
j11−
j22)
2+
4j212,
(2.6)where j11, j12and j22are thecomponentsof Jρ.Theyaregiven as
j11
=
Kρ∗
(∂
xuσ)
2,
j12=
j21=
Kρ∗
∂
xuσ∂
yuσ,
j22=
Kρ∗
∂
yuσ 2.
(2.7)The eigenvalues of Jρ describe the
ρ
-averaged contrast in theeigendirections, meaning: if
μ
1=
μ
2=
0,the image is inhomo-geneous area; if
μ
1μ
2=
0, it is on a straight line; and ifμ
1>
μ
20, it is at objects’ corner. Based on the eigenvalues, wecandefinethefollowinglocalstructuralcoherencequantity1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
66 132
Thisquantityis largeforlinearstructuresandsmallfor homoge-neousareasintheimage.Withthederived structuretensor
(2.5)
wedefineanewtensorT=
D
Jρ(
∇
uσ)
whoseeigenvectorsare
paralleltotheonesof Jρ
(
∇
uσ)
anditseigenvaluesλ
1 andλ
2 are chosen depending ondifferentimage processingapplications.For denoisingproblems,weneedtoprohibitthediffusionacrossimageedges and encourage strong diffusion along edges. We therefore
considerthefollowing twodiffusioncoefficientsforthe eigenval-ues
λ
1=
1 s
≤
01
−
e−3.31488
(s/C)8 s
>
0,
λ
2=
1,
(2.9)withs
:= |∇
uσ|
thegradientmagnitudeandCthecontrast param-eter.Forinpaintingproblems,wewanttopreservelinearstructures andthusregularisationalong isophotesoftheimage is appropri-ate.WethereforeconsidertheweightsthatWeickert[32]
usedfor enhancingthe coherence oflinear structures.Withμ
1,μ
2 being theeigenvaluesof Jρ asbefore,wedefineλ
1=
γ
,
λ
2=
γ
μ
1=
μ
2γ
+
(
1−
γ
)
e−CohC else,
(2.10)where
γ
∈
(
0,
1)
,γ
1. The constantγ
determines how steeptheexponential functionis.Thestructurethreshold
C
affectshow the approach interprets local structures. The larger theparame-tervalue is, the more coherent the method will be. With these
eigenvalues,theregularisationisstrongerintheneighbourhoodof coherentstructures(note that
ρ
determines theradius ofneigh-bourhood)and weaker inhomogeneous areas, atcorners, andin
incoherentareasoftheimage.
3. Discretisationofdifferentialoperators
InordertoimplementADMMfortheproposedTWSOmodel,it
isnecessarytodiscretisethederivativesinvolved.Wenotethat dif-ferentdiscretisation mayleadtodifferentnumericalexperimental results.In thispaper,we usethe forward–backwardfinite
differ-encescheme.Let
denotethetwodimensionalgreyscaleimage
ofsize MN,andxand y denotethecoordinatesalong image
col-umn and row directions respectively. The discrete second order
derivativesofuatpoint
(
i,
j)
alongxandydirectionscanbethen writtenas∂
x+∂
x−ui,j=
∂
x−∂
x+ui,j=
⎧
⎨
⎩
ui,N
−
2ui,j+
ui,j+1 if 1≤
i≤
M,
j=
1 ui,j−1−
2ui,j+
ui,j+1 if 1≤
i≤
M,
1<
j<
N ui,j−1−
2ui,j+
ui,1 if 1≤
i≤
M,
j=
N,
(3.1)∂
+y∂
−yui,j=
∂
−y∂
+yui,j=
⎧
⎨
⎩
uM,j
−
2ui,j+
ui+1,j ifi=
1,
1≤
j≤
Nui−1,j
−
2ui,j+
ui+1,j if 1<
i<
M,
1≤
j≤
Nui−1,j
−
2ui,j+
u1,j ifi=
M,
1≤
j≤
N,
(3.2)∂
x+∂
+yui,j=
∂
+y∂
x+ui,j=
⎧
⎪
⎪
⎨
⎪
⎪
⎩
ui,j
−
ui+1,j−
ui,j+1+
ui+1,j+1 if 1≤
i<
M,
1≤
j<
N ui,j−
u1,j−
ui,j+1+
u1,j+1 ifi=
M,
1≤
j<
N ui,j−
ui+1,j−
ui,1+
ui+1,1 if 1≤
i<
M,
j=
N ui,j−
u1,j−
ui,1+
u1,1 ifi=
M,
j=
N,
(3.3)
Fig. 1.Discrete second order derivatives.
∂
x−∂
−yui,j=
∂
−y∂
x−ui,j=
⎧
⎪
⎪
⎨
⎪
⎪
⎩
ui,j
−
ui,N−
uM,j+
uM,N ifi=
1,
j=
1ui,j
−
ui,j−1−
uM,j+
uM,j−1 ifi=
1,
1<
j≤
N ui,j−
ui,N−
ui−1,j+
ui−1,N if 1<
i≤
M,
j=
1ui,j
−
ui,j−1−
ui−1,j+
ui−1,j−1 if 1<
i≤
M,
1<
j≤
N.
(3.4)
Fig. 1 summarises these discrete differential operators. Based on
theabove forward–backwardfinitedifference scheme,thesecond
orderHessianmatrix
∇
2uin(2.2)
canbediscretisedas∇
2u=
∂
x−∂
x+u∂
+y∂
x+u∂
x+∂
+yu∂
−y∂
+yu.
(3.5)In (3.1)–(3.5), we assume that u satisfies the periodic boundary
conditionsothatthefastFouriertransform(FFT)solvercanbe ap-plied to solve (2.3) analytically. The numerical approximation of thesecondorderdivergenceoperatordi v2 isbasedonthe follow-ingexpansion
di v2
(
P)
=
∂
x+∂
x−(
P1)
+
∂
−y∂
x−(
P2)
+
∂
x−∂
−y(
P3)
+
∂
+y∂
−y(
P4),
(3.6)where P is a 2
×
2 matrix whose four components are P1, P2,P3 andP4,respectively. Formoredetaileddescription ofthe dis-cretisation ofotherhighorderdifferentialoperators, werefer the readerto [3,4]. Moreadvanced discretisation on a staggered grid canbefoundin
[21,33,34]
.Finally, we address the implementation problem of the first
orderderivativesofuσ in
(2.7)
.Sincethedifferentiationandcon-volutionarecommutative,wecantakethederivative andsmooth
theimageineitherorder.Inthissense,wehave
∂
xuσ=
∂
xKσ∗
u,
∂
yuσ=
∂
yKσ∗
u.
(3.7) Alternatively, the centralfinite difference scheme can be usedto approximate∂
xuσ and∂
yuσ tosatisfytherotation-invariant prop-erty.Onceallnecessarydiscretisationisdone,thenumericalcom-putationcanbeimplemented.
4. Numericaloptimisationalgorithm
It is nontrivial to directly solve the TWSO model due to the
facts:1) it isnonsmooth; 2) itcouples thetensor T andHessian matrix
∇
2u inT
∇
2u1 asshown in(2.4), making the resulting highorder Euler–Lagrange equation drasticallydifficult to discre-tisetosolvecomputationally.Toaddressthesetwodifficulties,we
presentan efficientnumericalalgorithmbasedonADMMto
min-imisethevariationalmodel
(2.3)
.4.1. AlternatingDirectionMethodofMultipliers(ADMM)
ADMMcombines thedecomposability ofthe dualascent with
superiorconvergencepropertiesofthemethodofmultipliers.
Re-cent research [20] unveils that ADMM is also closely related to
1 67 2 68 3 69 4 70 5 71 6 72 7 73 8 74 9 75 10 76 11 77 12 78 13 79 14 80 15 81 16 82 17 83 18 84 19 85 20 86 21 87 22 88 23 89 24 90 25 91 26 92 27 93 28 94 29 95 30 96 31 97 32 98 33 99 34 100 35 101 36 102 37 103 38 104 39 105 40 106 41 107 42 108 43 109 44 110 45 111 46 112 47 113 48 114 49 115 50 116 51 117 52 118 53 119 54 120 55 121 56 122 57 123 58 124 59 125 60 126 61 127 62 128 63 129 64 130 65 131 66 132 min
x,z
{
f(
x)
+
g(
z)
}
s.
t.
Ax+
Bz=
c,
(4.1) wherex∈
Rd1,z∈
Rd2,A∈
Rm×d1,B∈
Rm×d2,c∈
Rm,andboth f(
·
)
andg(
·
)
areassumedtobeconvex.TheaugmentedLagrange func-tionofproblem(4.1)
canbewrittenasL
A(
x,
z;
ρ
)
=
f(
x)
+
g(
z)
+
β
2
Ax+
Bz−
c−
ρ
2
2
,
(4.2)where
ρ
is an augmented Lagrangian multiplier andβ >
0 isan augmentedpenalty parameter.At thekthiteration, ADMM
at-tempts tosolve problem(4.2) by iteratively minimising
L
A with respecttoxandz,andupdatingρ
accordingly.Theresulting opti-misationprocedureissummarisedinAlgorithm 1
.Algorithm1ADMM.
1: Initialization: Set β >0, z0and ρ0. 2:whileastoppingcriterionisnotsatisfieddo 3: xk+1=arg minxf
(x)+β2Ax+Bz
k−c−ρk2 2
.
4: zk+1=arg minzg(z)+β
2Axk+1+Bzk−c−ρk22
. 5: ρk+1=ρk− Axk+1+Bzk+1−c.
6:endwhile
4.2. ApplicationofADMMtosolvetheTWSOmodel
Wenow useADMMtosolvethe minimisationproblemofthe
proposed TWSO model (2.3).The basic idea of ADMMis to first
split the original nonsmooth minimisation problem into several
subproblems by introducing some auxiliary variables, and then
solve each subproblemseparately. Thisnumerical algorithm
ben-efitsfrombothsolutionstabilityandfastconvergence.
In orderto implement ADMM,one scalar auxiliary variable u
˜
andtwo2
×
2 matrix-valuedauxiliary variables W andVarein-troducedtoreformulate
(2.3)
intothefollowingconstraintoptimi-sationproblem
min
˜ u,u,W,V
η
p
1 u˜
−
f pp
+
W1
s.t.u
˜
=
u,
V= ∇
2u,
W=
TV,
(4.3)
whereW
=
(
W11W12W21W22
)
,V=
(
V11V12
V21V22
)
.Theconstraintsu˜
=
uandW
=
TVarerespectivelyappliedtohandlethenon-smoothnessofthedata fidelityterm(p
=
1) andtheregularisationterm, whilst V= ∇
2udecouplesTand∇
2uintheTWSO.Thethreeconstraints togethermakethecalculationforeachsubproblempoint-wiseandthus no huge matrix multiplication or inversion is required. To
guaranteeanoptimalsolution,theaboveconstrainedproblem
(4.3)
can be solved through ADMM summarised in Algorithm 1. Let
L
A u˜
,
u,
W,
V;
s,
d,
b be the augmented Lagrange functional of(4.3),whichisdefinedasfollows
L
A u˜
,
u,
W,
V;
s,
d,
b=
η
p
||
1 u˜
−
f||
pp
+ ||
W||1
+
θ
12
||˜
u−
u−
s||
2 2
+
θ
22
||
V− ∇
2u
−
d||
2 2+
θ
32
||
W−
TV−
b||
2
2
,
(4.4)where s, d
=
(
d11d12d21d22
)
and b=
(
b11b12
b21b22
)
are the augmented Lagrangianmultipliers,andθ
1,θ
2andθ
3 arepositivepenalty con-stantscontrollingtheweightsofthepenaltyterms.We will now decompose the optimisation problem (4.4) into
foursubproblemswithrespecttou
˜
,u,WandV,andthenupdate theLagrangianmultiplierss,dandb untiltheoptimalsolutionis foundandtheprocessconverges.1)u
˜
-subproblem:Thisproblemu˜
k+1←
min ˜u
L
A u˜
,
uk,
Wk,
Vk;
sk
,
dk,
bkcanbesolvedbyconsideringthefollowingminimisation problem˜
uk+1
=
arg min˜ u
η
p
||
1 u˜
−
f||
p p+
θ
12
||˜
u−
uk
−
sk||
2 2.
(4.5)Thesolutionof
(4.5)
dependsonthechoiceofp.Giventhedomainforimagedenoisingorinpainting,theclosed-formformulaefor theminimisersu
˜
k+1 underdifferentconditionsare˜
uk+1
=
1η
f+
θ
1 uk+
sk(
1η
+
θ
1)
ifp=
2˜
uk+1
=
f+
max|
ψ
k| −
1η θ1,
0◦
signψ
k ifp=
1,
(4.6)where
ψ
k=
uk+
sk−
f.◦
andsignsymbolsdenotethe component-wisemultiplicationandsignumfunction,respectively.2) u-subproblem: We then solve u-subproblem uk+1
←
minu
L
A u˜
k+1,
u,
Wk,
Vk;
sk,
dk,
bkby minimising the following
problem.
uk+1
=
arg minu
θ
12
||˜
uk+1
−
u−
sk||
2 2+
θ
22
||
Vk
− ∇
2u−
dk||
2 2,
(4.7)
whoseclosed-formcanbeobtainedusingthefollowingFFTunder
the assumptionofthecirculant boundary condition(Note that to benefitfromthefastFFTsolverforimageinpaintingproblems,the introduction of u
˜
is compulsory due to the fact thatF
(
1u)
=
1
F
(
u)
)uk+1
=
F
−1F
θ
1 u˜
k+1−
sk+
θ
2di v2 Vk−
dkθ
1+
θ
2F
di v2∇
2,
(4.8)where
F
andF
−1 respectively denotethediscreteFourier trans-formandinverseFouriertransform;di v2 isasecond order diver-genceoperatorwhosediscreteformisdefinedin(3.6)
;“—”stands forthepointwisedivisionofmatrices.Thevaluesofthecoefficient matrixF
(
di v2∇
2)
equal4(
cos2πNq+
cos2Mπr−
2)
,whereMandNrespectivelystand fortheimage widthandheight, andr
∈ [
0,
M)
andq
∈ [
0,
N)
are thefrequencies inthe frequencydomain.Note thatinadditiontoFFT,AOSandGauss–Seideliterationcanbe ap-pliedtominimisetheproblem(4.7)
withverylowcost.3) W-subproblem: We now solve the W-subproblem Wk+1
←
minWL
A u˜
k+1,
uk+1,
W,
Vk;
sk,
dk,
bk. Note that the unknown
matrix-valued variableW iscomponentwiseseparable, whichcan
be effectively solved through the analytical shrinkage operation, alsoknownasthesoftgeneralisedthresholdingequation
Wk+1
=
arg minW
W1
+
θ
32
W−
TVk
−
bk2 2
,
whosesolutionWk+1 isgivenby
Wk+1
=
max TVk+
bk−
1θ
3,
0◦
TVk
+
bkTVk
+
bk,
(4.9)withtheconventionthat0
·
(
0/0)
=
0.4)The V-subproblem:Givenfixeduk+1,Wk+1,dk,bk,the solu-tionVk+1 oftheV-subproblemVk+1
←
minV
L
A u˜
k+1,
uk+1,
Wk+1,
V
;
sk,
dk,
bkisequivalenttosolvingthefollowingleast-squareop-timisationproblem
Vk+1
=
arg minV
θ
22
||
V− ∇
2uk+1
−
dk||
2 2+
θ
32
||
Wk+1
−
TV−
bk||
2 21 67 2 68 3 69 4 70 5 71 6 72 7 73 8 74 9 75 10 76 11 77 12 78 13 79 14 80 15 81 16 82 17 83 18 84 19 85 20 86 21 87 22 88 23 89 24 90 25 91 26 92 27 93 28 94 29 95 30 96 31 97 32 98 33 99 34 100 35 101 36 102 37 103 38 104 39 105 40 106 41 107 42 108 43 109 44 110 45 111 46 112 47 113 48 114 49 115 50 116 51 117 52 118 53 119 54 120 55 121 56 122 57 123 58 124 59 125 60 126 61 127 62 128 63 129 64 130 65 131 66 132
whichresultsinthefollowinglinearsystemwithrespectto each componentinthevariableVk+1
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
R11Vk11+1
+
R21Vk21+1=
θ
2(∂
x−∂
x+uk+1+
dk11)
−
θ
3(
T11Q11+
T21Q21)
R12Vk11+1+
R22Vk21+1=
θ
2(∂
x+∂
+yuk+1+
dk21)
−
θ
3(
T12Q11+
T22Q21)
R11Vk12+1+
R21Vk22+1=
θ
2(∂
+y∂
x+uk+1+
dk12)
−
θ
3(
T11Q12+
T21Q22)
R12Vk12+1+
R22Vk22+1=
θ
2(∂
−y∂
+yuk+1+
dk22)
−
θ
3(
T12Q12+
T22Q22)
,
(4.10)where we define R11
=
θ
3(
T211+
T221)
+
θ
2, R12=
R21=
θ
3(
T11T12+
T21T22)
, R22=
θ
3 T212+
T222+
θ
2; Q11=
bk11−
W k+1 11 ,Q12
=
bk12−
W k+112 ,Q21
=
bk21−
W k+121 andQ22
=
bk22−
W k+1 22 .Note thattheclosed-formsofVk11+1andVk21+1canbecalculatedfromthe firsttwo equationsin(4.10)
,whilstthelasttwoequationsleadto theanalyticalsolutionsofVk12+1 andVk22+1.5) s, d and b update: At each iteration, we update the
aug-mented Lagrangianmultiplies s, d andb as shownfromStep09
to 11in
Algorithm 2
.Algorithm 2 ADMM for the proposed TWSO model for image restoration.
01: Input: f, 1, p, ρ, σ, γ, C, C, ηand (θ1,θ2,θ3). 02: Initialise: u=f, W0=0,V0=0,d0=0,b0=0. 03:whilesomestoppingcriterionisnotsatisfieddo 04: Compute u˜k+1according to (4.6). 05: Compute uk+1according to (4.8). 06: Compute Wk+1according to (4.9). 07: Compute Vk+1according to (4.10). 08: Compute Tk+1=D J
ρ ∇uk+σ1
according to (2.9)or (2.10). 09: Update Lagrangian multiplier sk+1=sk+uk+1− ˜uk+1. 10: Update Lagrangian multiplier dk+1=dk+ ∇2uk+1−Vk+1. 11: Update Lagrangian multiplier bk+1=bk+
(TV)k+1−Wk+1. 12:endwhile
In summary, an ADMM-based iterative algorithm was
devel-opedtodecomposetheoriginalnonsmoothminimisationproblem
into four simple subproblems, each of which has a closed-form
solution that can be point-wisely solved using the efficient
nu-merical methods (i.e. FFT and shrinkage). The overall numerical
optimisationalgorithmofourproposedmethodforimage restora-tioncanbesummarisedin
Algorithm 2
.Wenote thatinorderto obtain better denoising and inpainting results, we iteratively re-finethediffusiontensorTusingtherecoveredimage (i.e.uk+1 as showninStep 8 inAlgorithm 2). This refinement iscrucial asit providesmoreaccuratetensorinformationforthenextround iter-ation,thusleadingtomorepleasantrestorationresults.Duetothe reweighedprocesstheconvergenceofthealgorithmisnot guaran-teed.However,thealgorithm isstill fastandstable, asevident in ourexperiments.5. Numericalexperiments
We conduct numerical experiments to compare the TWSO
modelwith state-of-the-art approaches for image inpainting and
denoising.Theimagesusedinthisstudyarenormalisedto[0,255] beforeinpaintinganddenoising.Themetricsforquantitative
eval-uation of different methods are the peak signal-to-noise ratio
(PSNR)andstructuresimilarityindexmap(SSIM).ThehigherPSNR
andSSIM a methodobtainsthe betterthemethodwill be.In
or-dertomaximisetheperformanceofallthecomparedmethods,we
carefullyadjust their built-in parameters such that the resulting
PSNRandSSIMbythesemethodsaremaximised.Inthefollowing,
weshall introducehow toselecttheseparameters forthe TWSO
modelindetail.
5.1. Parameters
Forimage inpainting, there are 8parameters inthe proposed
model: thestandard deviations
ρ
andσ
in (2.5), theconstantγ
andstructurethreshold
C
in(2.10)
,theregularisationparameterη
in
(4.4)
,andthepenaltyparametersθ
1,θ
2 andθ
3in(4.4)
.The parameter
ρ
averages orientation information and helpstostabilise thedirectionalbehaviour ofthediffusion.Large inter-ruptedlinescanbe connectedif
ρ
isequalorlargerthanthegap size.Theselectionofρ
foreachexamplehasbeenlistedinTable 1
.σ
is used to decrease the influence of noise and guaranteenu-mericalstabilisationandtherebygivesamorerobustestimationof thestructuretensor Jρ in
(2.5)
.γ
in(2.10)
determineshowsteep theexponentialfunctionis.Weickert[32]
suggestedγ
∈
(
0,
1)
andγ
1. Thereforeγ
is fixed at 0.01. The structure thresholdC
affects how the method understands local image structures. The
largertheparameter valueis,themoresensitivethe methodwill
be. However, if
C
goes to infinity, our TWSO model reduces tothe isotropic SOTV model.
C
’s selection fordifferent examples is presentedinTable 1
.Theregularisationparameterη
controlsthesmoothness of the restored image. Smaller
η
leads to smootherrestoration,anditshouldberelativelylargetomaketheinpainted imageclosetotheoriginalimage.Thevalueof
η
ischosenas100 foralltheinpaintingexperiments.We now illustrate how to choose the penalty parameters
θ
1,θ
2 andθ
3. Due to the augmented Lagrangian multipliers used,different combinationsof thethree parameters will provide
sim-ilar inpainting results. However, the convergence speed will be
affected. In order to guarantee the convergence speed, we use
the rule introduced in [35] to tune
θ
1,θ
2 andθ
3. Namely, the residuals Rki(
i=
1,
2,
3)
definedin(5.1)
,therelativeerrorsofthe Lagrangianmultipliers Lki(
i=
1,
2,
3)
definedin(5.2)
andthe rel-ativeerrorsofudefinedin(5.3)
shouldreducetozerowithnearly thesame speedasthe iterationproceeds. Forexample,inall the inpaintingexperiments,settingθ
1=
0.
01,θ
2=
0.
01 andθ
3=
0.
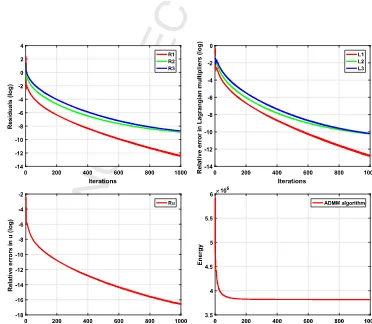
001 givesagoodconvergencespeedaseachpairofcurvesinFig. 2
(a) and(b)decreasetozerowithverysimilarspeed.Inaddition,Fig. 2
(d)showsthatthenumericalenergyoftheTWSOmodel(2.3)
has reachedtoasteadystate afteronlyafewiterations.Fig. 2
shows theplotsforarealinpaintingexampleinFig. 7
.TheresidualsRki
(
i=
1,
2,
3)
aredefinedasRk1
,
Rk2,
Rk3=
1|
|
˜
uk
− ˜
ukL1
,
1
|
|
Vk
− ∇
2ukL1
,
1
|
|
Wk
−
TVkL1
,
(5.1)
where
·
L1 denotes the L1-norm on the image domain.
The relative errors of the augmented Lagrangian multipliers Lk
i
(
i=
1,
2,
3)
aredefinedasLk1
,
Lk2,
Lk3=
||
sk−
sk−1||
L1||
sk−1||
L1
,
||
dk
−
dk−1||
L1||
dk−1||
L1
,
||
bk
−
bk−1||
L1||
bk−1||
L1
.
(5.2)Therelativeerrorsofuaredefinedas
Rku
=
||
uk
−
uk−1||
L1||
uk−1||
L1
.
(5.3)In summary, there are only two built-in parameters
ρ
andC
that need to be adjusted forinpainting different images(see
Ta-ble 1fortheir selections).Consequently,the proposed TWSOisa
1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
[image:6.612.106.477.58.369.2]66 132
Fig. 2.Plots of the residuals (5.1), the relative errors of the Lagrangian multipliers (5.2), the relative errors of the function uin (5.3), and the energy of the proposed model (2.3)against number of iterations for the real inpainting example in Fig. 7.
[image:6.612.105.477.398.722.2]1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
66 132
Table 1
Parameters used in the TWSO model for the examples in Figs. 4–7and Figs. 9–10.
Parameter Fig. 4 Fig. 5 Fig. 6 Fig. 7 Fig. 9 Fig. 10
1st, 2nd columns 3rd, 4th columns 5th, 6th columns All rows
ρ 10 10 10 10 10 5 1 1
σ 1 1 1 1 1 1 1 1
γ 0.01 0.01 0.01 0.01 0.01 0.01 – –
C/C 10 1 5 1 1 1 5 5
η 100 100 100 100 100 100 0.04 0.05
θ1 0.01 0.01 0.01 0.01 0.01 0.01 5 5
θ2 0.01 0.01 0.01 0.01 0.01 0.01 5 5
θ3 0.001 0.001 0.001 0.001 0.001 0.001 10 10
Fig. 4.Performance comparison of the SOTV and TWSO models on some degraded images. The red regions in the first row are inpainting domains. The second and third rows show the corresponding inpainting results by the SOTV and the TWSO models, respectively. (For interpretation of the references to colour in this figure legend, the reader is referred to the web version of this article.)
Fig. 5.Test on a black stripe with different geometries. (a): Images with red inpaint-ing regions. The last three inpaintinpaint-ing gaps have the same width but with different geometry; (b–f): results of TV, SOTV, TGV, Euler’s elastica, and TWSO, respectively. (For interpretation of the references to colour in this figure legend, the reader is referred to the web version of this article.)
For image denoising, there are 7 parameters in the TWSO
model:
ρ
andσ
in (2.5), the contrastparameter C in(2.9)
, andη
,θ
1,θ
2 andθ
3 in (4.4).Each parameter plays a similar role asits counterpart in the inpainting model. However, in contrast to
inpainting,
ρ
hereshouldbesmallbecausewedonotneedtocon-nectgaps forimagedenoising. We havealsofound that
σ
=
1 issufficientforthecasesconsideredinthispaper.C determineshow
muchanisotropy theTWSO modelwillbringto theresulting
im-age.We illustrate theeffect ofthisparameter usingthe example
in Fig. 10.The regularisation parameter
η
should be smallwhenimage noise level ishigh. The three penalty parameters are cho-senbasedonthequantitiesdefinedin
(5.1)
,(5.2)
and(5.3)
.Fig. 3
showsthatusingθ
1=
5,θ
2=
5 andθ
3=
10 leadstofast conver-gencespeedforthesyntheticimageinFig. 9
andthesevaluesare usedfortherestofimagedenoisingexamples.Finally,the param-etersselectedaregiveninthelasttwocolumnsinTable 1
.5.2. Imageinpainting
In thissection we test the capability of the TWSO model for
image inpainting andcompare itwithseveral state-of-the-art in-paintingmethodssuchastheTV
[36]
,TGV[37]
,SOTV[2,22]
,and Euler’selastica[21,38]
models.We denotethe inpainting domain asD inthefollowingexperiments.Theregioninequation
(2.3)
is\
D.Weuse p=
2 forallexamplesinimageinpainting.Fig. 4illustratestheimportanceofthetensorTintheproposed
TWSOmodel.Thedamaged imagesoverlaid withthered
inpaint-ingdomainsareshowninthefirstrow.Secondrowandthirdrow
show that theTWSO performs muchbetter thanSOTV.SOTV
in-troducesblurring tothe inpainted regions, whilst TWSOrecovers theseshapesverywellwithoutcausingmuchblurring.Inaddition to the capability ofinpainting large gaps, the TWSO interpolates
smoothly along the level curves of the image in the inpainting
domain,indicatingtheeffectivenessoftensorinTWSOfor inpaint-ing.
In
Fig. 5
,we show howdifferent geometriesof theinpainting region affectthe results by different methods. Column (b) illus-tratesthatTVperformssatisfactorilyiftheinpaintingareaisthin. However,itfailsinimagesthatcontainlargegaps.Column(c) indi-catesthattheinpaintingresultbySOTVdependsonthegeometry oftheinpaintingregion.Itisabletoinpaintlargegapsbutatthe1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
66 132
Fig. 7.Real example inpainting. “Cornelia, mother of the Gracchi” by J. Suvee (Louvre). From left to right are degraded image, inpainting results of TV, SOTV, TGV, Euler’s elastica, and TWSO, respectively; Second row shows the local magnification of the corresponding results in the first row.
Table 2
Comparison of PSNR and SSIM of different methods inFigs. 5–7.
PSNR test SSIM value
Figure # Fig. 5 Fig. 6 Fig. 7 Fig. 5 Fig. 6 Fig. 7
1strow 2ndrow 3rdrow 4throw 1st row 2nd row 3rd row 4th row
Degraded 18.5316 12.1754 11.9285 11.6201 8.1022 14.9359 0.9418 0.9220 0.8778 0.8085 0.5541 0.8589
TV Inf 12.7107 12.7107 12.7107 14.4360 35.7886 1.0000 0.9230 0.9230 0.9230 0.6028 0.9936
SOTV 28.7742 14.1931 18.5122 12.8831 14.9846 35.6840 0.9739 0.9289 0.9165 0.8118 0.6911 0.9951
TGV 43.9326 12.7446 12.7551 13.4604 14.0600 36.0854 0.9995 0.9232 0.9233 0.8167 0.6014 0.9941
Euler’s elastica 70.2979 54.0630 51.0182 13.0504 14.8741 34.3064 1.0000 0.9946 0.9982 0.8871 0.6594 0.9878
TWSO Inf Inf Inf 43.3365 27.7241 41.1400 1.0000 1.0000 1.0000 0.9992 0.9689 0.9976
Table 3
Mean and standard deviation (SD) of PSNR and SSIM calculated using 5 different methods for image inpainting over 100 images from the Berkeley database BSDS500 with 4 different random masks.
PSNR value (Mean±SD) SSIM value (Mean±SD)
Missing 40% 60% 80% 90% 40% 60% 80% 90%
Degraded 9.020±0.4208 7.250±0.4200 6.010±0.4248 5.490±0.4245 0.05±0.0302 0.03±0.0158 0.01±0.0065 0.007±0.003 TV 31.99±3.5473 28.68±3.3217 24.61±2.7248 20.94±2.2431 0.92±0.0251 0.84±0.0412 0.67±0.0638 0.48±0.0771 TGV 31.84±3.9221 28.70±3.8181 25.52±3.6559 23.32±3.5221 0.93±0.0310 0.87±0.0580 0.75±0.1023 0.64±0.1372 SOTV 32.43±4.9447 29.39±4.5756 26.38±4.2877 24.41±4.0720 0.94±0.0308 0.89±0.0531 0.80±0.0902 0.71±0.1204 Euler’s elastica 32.12±4.0617 29.21±3.9857 26.30±3.8194 24.34±3.6208 0.94±0.0288 0.88±0.0526 0.78±0.0901 0.69±0.1208 TWSO 34.33±3.4049 31.12±3.0650 27.66±3.6540 25.26±3.2437 0.95±0.0204 0.90±0.0456 0.82±0.0853 0.73±0.1061
costofintroducingblurring.Mathematically,TGVisacombination ofTVandSOTV,soitsresults,asshowninColumn(d),aresimilar
tothoseofTVandSOTV.TGVresultsalsoseemtodependonthe
geometryoftheinpaintingarea.ThelastcolumnshowsthatTWSO inpaintsthe imagesperfectlywithoutanyblurring andregardless localgeometry. TWSO isalso slightlybetter than Euler’selastica, whichhasproventobeveryeffectiveindealingwithlargergaps.
Wenow showan exampleofinpainting asmooth image with
large gaps. Fig. 6 showsthat all the methods, except the TWSO
model,fail ininpainting the largegaps inthe image. Thisis due to the fact that TWSO integrates the tensor T with its eigenval-uesdefinedin
(2.10)
, whichmakes itsuitable forrestoringlinear structures,asshowninthesecondrowofFig. 6
.Fig. 7comparestheinpaintingofarealimagebyallthe
meth-ods.TheinpaintingresultoftheTVmodelseemstobemore satis-factorythanthoseofSOTVandTGV,thoughitproducespiecewise constantrestoration. Fromthesecond row,neitherTV norTGVis
able to connect the gaps on the cloth. SOTV reduces some gaps
but blurs the connecting region. Euler’s elastica performs better
than TV,SOTV andTGV, but nobetter than the proposed TWSO
model.
Table 2
showsthattheTWSO isthemostaccurateamongallthemethodscomparedfortheexamplesin
Figs. 5–7
.Finally,we evaluateTV, SOTV,TGV,Euler’s elasticaandTWSO
ontheBerkeleydatabaseBSDS500forimageinpainting.Weuse4
randommasks(i.e.40%,60%, 80% and90% pixelsaremissing)for
each ofthe100imagesrandomlyselectedfromthedatabase.The
performance ofeachmethodforeachmask ismeasuredinterms
of mean andstandard derivation ofPSNR and SSIM over all 100
images.Theresultsaredemonstratedinthefollowing
Table 3
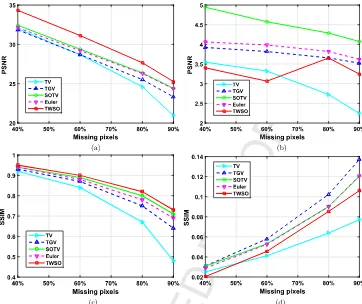
andFig. 8.Theaccuracyoftheinpaintingresultsobtainedbydifferent
methods decreasesasthepercentageofmissingpixelsregion be-comeslarger.ThehighestaveragedPSNRvaluesareagainachieved bytheTWSO,demonstratingitseffectivenessforimageinpainting.
5.3. Imagedenoising
FordenoisingimagescorruptedbyGaussiannoise,weuse p
=
2 in (2.3) andthe
in (2.3) is the same as the image domain
.WecomparetheproposedTWSOmodelwiththePerona–Malik
(PM)
[39]
,coherentenhancingdiffusion(CED)[32]
,totalvariation (TV)[40]
,second ordertotalvariation(SOTV)[1,22,26]
,total gen-eralised variation (TGV) [30], and extended anisotropic diffusion model4 (EAD)[11]
onbothsyntheticandrealimages.Fig. 9 showsthe denoisedresultson a syntheticimage (a)by
differentmethods.TheresultsbythePMandTVmodels,asshown in (c) and (e), have a jagged appearance (i.e. staircase artefact).
1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
[image:9.612.124.486.54.358.2]66 132
[image:9.612.46.556.392.519.2]Fig. 8.Plots of mean and standard derivation in Table 3obtained by 5 different methods over 100 images from the Berkeley database BSDS500 with 4 different random masks. (a) and (b): mean and standard derivation plots of PSNR; (c) and (d): mean and standard derivation plots of SSIM.
Fig. 9.Denoising results of a synthetic test image. (a) Clean data; (b) Image corrupted by 0.02 variance Gaussian noise; (c–i): Results of PM, CED, TV, SOTV, TGV, EAD, and TWSO, respectively. Second row shows the isosurface rendering of the corresponding results above.
However, the scale-space-based PM model shows much stronger
staircaseeffectthantheenergy-basedvariationalTVmodelfor de-noisingpiecewisesmoothimages.Duetotheanisotropy,theresult (d)by theCEDmethoddisplays strongdirectional characteristics.
Due to the high order derivatives involved, the SOTV, TGV and
TWSOmodelscanreducethestaircaseartefact.However,because
the SOTV imposes too much regularity on the image, it smears
the sharpedges of theobjects in(f). Better results are obtained
by the TGV, EAD and TWSO models, which show no staircase
andblurringeffects,though TGV leavessome noise nearthe
dis-continuities andEAD over-smoothsimage edges, asshownin (g)
and (h).
Fig. 10presentsthedenoisedresultsonarealimage(a)by
dif-ferentmethods.BoththeCEDandtheproposedTWSOmodelsuse
the anisotropic diffusion tensor T. CED distorts the image while
TWSOdoesnot. Thereasonforthisisthat TWSOusesthe
eigen-valuesofTdefinedin
(2.9)
,whichhastwoadvantages:i)itallows ustocontrolthedegreeoftheanisotropyofTWSO.IfthecontrastparameterCin
(2.9)
goestoinfinity,theTWSOmodeldegenerates to theisotropic SOTV model.The larger C is,the lessanisotropyTWSO has.The eigenvalues (2.10) used in CED however are not
able to adjust theanisotropy; ii)it can determine ifthere exists diffusion inTWSO along the directionparallel to the image gra-dient. Thediffusionhaltsalongtheimage gradientdirectionif
λ
1 in(2.9)
issmallandencouragedifλ
1 islarge.Bychoosinga suit-ableC,(2.9)
allowsTWSO todiffusethenoisealongobjectedges andprohibitthediffusionacrossedges.Theeigenvalueλ
1 usedin(2.10) howeverremains small(i.e.
λ
11) all the time, meaningthat the diffusionalong image gradient inCEDis always prohib-ited.CEDthusonlypreferstheorientationthatisperpendicularto theimagegradient,whichexplainswhyCEDdistortstheimage.
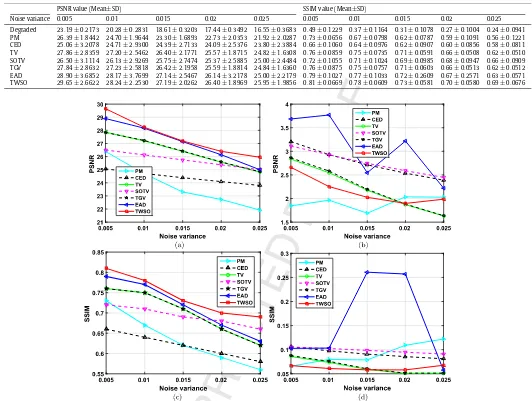
In addition to qualitative evaluation of different methods in
Fig. 9 and 10, we also calculate the PSNR and SSIM values for
thesemethodsandshowthemin
Table 4
andFig. 11
.Thesemet-ricsshowthatthePDE-basedmethods(i.e.PMandCED)perform
1 67
2 68
3 69
4 70
5 71
6 72
7 73
8 74
9 75
10 76
11 77
12 78
13 79
14 80
15 81
16 82
17 83
18 84
19 85
20 86
21 87
22 88
23 89
24 90
25 91
26 92
27 93
28 94
29 95
30 96
31 97
32 98
33 99
34 100
35 101
36 102
37 103
38 104
39 105
40 106
41 107
42 108
43 109
44 110
45 111
46 112
47 113
48 114
49 115
50 116
51 117
52 118
53 119
54 120
55 121
56 122
57 123
58 124
59 125
60 126
61 127
62 128
63 129
64 130
65 131
[image:10.612.37.549.58.186.2]66 132
Fig. 10.Noise reduction results of a real test image. (a) Clean data; (b) Noisy data corrupted by 0.015 variance Gaussian noise; (c–i): Results of PM, CED, TV, SOTV, TGV, EAD, and TWSO, respectively. The second row shows local magnification of the corresponding results in the first row.
Table 4
Comparison of PSNR and SSIM using different methods on Fig. 9 and 10with different noise variances.
Fig. 9 Fig. 10
PSNR value SSIM value PSNR value SSIM value
Noise variance 0.005 0.01 0.015 0.02 0.025 0.005 0.01 0.015 0.02 0.025 0.005 0.01 0.015 0.02 0.025 0.005 0.01 0.015 0.02 0.025
Degraded 23.1328 20.2140 18.4937 17.3647 16.4172 0.2776 0.1827 0.1419 0.1212 0.1038 23.5080 20.7039 19.0771 17.9694 17.1328 0.5125 0.4167 0.3625 0.3261 0.3009 PM 26.7680 23.3180 20.0096 19.4573 18.9757 0.8060 0.7907 0.7901 0.7850 0.7822 25.8799 24.0247 22.4998 22.0613 21.1334 0.7819 0.7273 0.6991 0.6760 0.6579 CED 29.4501 29.2004 28.4025 28.2601 27.7806 0.9414 0.9264 0.9055 0.8949 0.8858 23.8593 21.3432 20.2557 20.1251 20.0243 0.6728 0.6588 0.6425 0.6375 0.6233 TV 32.6027 29.9910 28.9663 28.3594 27.1481 0.9387 0.9233 0.9114 0.9017 0.8918 27.3892 25.5942 24.4370 23.5511 22.8590 0.8266 0.7826 0.7529 0.7331 0.7149 SOTV 32.7415 31.1342 30.1882 29.4404 28.3784 0.9653 0.9552 0.9474 0.9444 0.9332 26.1554 24.6041 23.5738 23.2721 22.5986 0.8252 0.7841 0.7546 0.7367 0.7201 TGV 36.1762 34.6838 33.1557 32.0843 30.6564 0.9821 0.9745 0.9688 0.9644 0.9571 27.5006 25.6966 24.5451 23.6456 22.9540 0.8375 0.7937 0.7659 0.7456 0.7386 EAD 34.8756 33.7161 32.6091 31.6987 30.6599 0.9764 0.9719 0.9678 0.9610 0.9548 27.0495 25.0156 24.1903 23.4999 23.2524 0.8232 0.7791 0.7606 0.7424 0.7382 TWSO 36.3192 34.7220 33.4009 32.7334 31.5537 0.9855 0.9771 0.9726 0.9704 0.9658 27.5997 25.8511 24.9060 24.1328 23.4983 0.8437 0.8063 0.7811 0.7603 0.7467
[image:10.612.58.516.252.720.2]