International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
1
Effect of Induction Machines „Efficiency Class‟ in Their
Application as Self-Excited Induction Generator (SEIG)
Kemal Ibrahim
1,
Roberto Leidhold
2 1Department of Electrical and Computer Engineering, School of Engineering, Adama Science and Technology University, Ethiopia
2Institute of Electrical Power Systems, Faculty of Electrical Engineering and Information Technology, Otto Von Guericke
University Magdeburg, Germany
Abstract- In this new millennium, the induction generator, with its lower maintenance demands and simplified controls, appears to be a good solution as isolated power supply schemes for rural electrification. Recent emphasis on the utilization of clean and renewable energy sources to reduce dependency on fossil fuels makes the use of SEIG even more attractive because vast amount of energy sources, such as wind and mini-hydro are available in remote areas where utility power is well out reach. In this paper, an attempt has been made to investigate the application of standard efficiency (IE1) class motor and premium efficiency (IE3) class motor as self-excited Induction Generator (SEIG) for stand-alone system. The study has been undertaken in two 3-phase induction motors with rated output power of 5.5 kW and class efficiency of IE1 and IE3 respectively. Both experimental and modeling analysis has been carried out in both machines to evaluate and compare their magnetization curve, self- excitation process, voltage delivery capability in permissible range and power load capability under resistive load condition. The obtained results are suggesting that machines operating in relatively high magnetic saturation region are more appropriate and economical in applying them as self-excited induction generator for stand-alone system. The study has also given valuable insight in method of determination of appropriate excitation capacitance to maximize the active power delivery of induction generator and to maintain the voltage in permissible region by taking in to account the magnetic saturation level of the given machine.
Keywords-SEIG, Premium efficiency, Standard efficiency, rural electrification, power load capability.
I. INTRODUCTION
Hydropower is considered to be one of the most important renewable energy sources (RES). RES are the second largest contributor to the global electricity production after fossil fuel [1]. In end-2012, they are accounted for 21.7% of total electricity generation, ahead of the nuclear power generation [2].
Most of the electricity generated from renewables comes from hydro power (76%) and the other comes from wind,
solar, tidal geothermal energy, etc. as shown in the Fig.1. [2].
Fig.1. Estimated Renewable energy share of global electricity production, end-2012 [2]
Unlike a synchronous generator, an SEIG (squirrel-cage type) is unable to supply reactive power. In fact, it absorbs reactive power from external source. The reactive power demand of the generator depends on its terminal voltage and other factors. For a constant terminal voltage, the reactive power demand of the generator increase with the increase of its active power delivery [3]. When the excitation capacitor is kept constant, the terminal voltage of the generator usually decreases with the increase in active power delivery [4]. This in turn decreases the amount of reactive power supplied by capacitor and that causes further reduction of voltage. That is why many researchers are still engaged in improving the inherent poor voltage regulation of this machine using various voltage regulation strategies in order to widen its applicability as generator.
This paper presents the comparison of standard efficiency (IE1) class motor and premium efficiency (IE3) class motor in their application as self-excited Induction Generator (SEIG) for stand-alone system. On top of this, the paper attempts to describe the effect of a relatively high magnetic saturation region operation of these machines on active power load delivery capability.
Fossil fuels and nuclear
Hydropower
Other renewables (non-hydro)
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
2
Definition of IE-code
An energy-efficient motor produces the same shaft output power (hp), but uses less electrical input power (kW) than a standard-efficiency motor [5]. The New international standard (IEC 60034-30:2008) for efficiency classes of motors defines the efficiency classes IE-code for low voltage three-phase motors with a power range from 0.75 kW to 375 kW. “IE” stands for “International Efficiency“ and is combined with a number:
[image:2.595.326.557.225.338.2]• IE1 = Standard efficiency • IE2 = High efficiency • IE3 = Premium efficiency
Fig.2. International standard efficiency level curves (IE-code) [5]. Energy-efficient motors are manufactured using the same frame as a standard motor, but have:
• Higher quality and thinner steel laminations in the stator • More copper in the windings
• Smaller air gap between the rotor and stator • Reduced fan losses
• Closer machining tolerances [see Appendix-A]
II. ANALYSIS
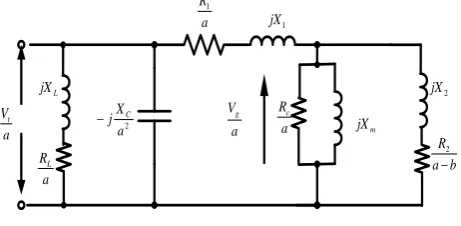
Fig. 3 shows the per-phase equivalent circuit commonly used for the steady-state analysis of the SEIG [6]. It should be noted that a transformation has been applied so that all the reactances and voltages are referred to the base frequency. a and b represent the per unit (pu) frequency and speed, respectively. The pu frequency a and the pu speed b are defined as
Here, f and N are the actual operating frequency (Hz) and rotor speed (rpm), respectively, of the generator, and fb and Ns are the base or rated frequency (Hz) and the corresponding synchronous speed (rpm), respectively, of the machine. When the generator operates at a frequency other than the base frequency, all reactances (inductive and capacitive) are to be adjusted accordingly.
In a generic way, the inductive reactances are to be multiplied by the pu frequency a and the capacitive reactances are to be divided by a. The circuit shown in Fig. 3 represents an equivalent circuit of the generator where all parameters (resistances and reactances) and voltages are divided by the pu frequency a, whereas the currents remain the same [7].
a Vt
a RL L
jX
2
a X j C
m
jX
b a
R
2
2
jX
1
jX a
R1
a Vg
a Rc
Fig.3. Per phase equivalent circuit of SEIG
All parameters of the generator, except the magnetizing reactance, are considered as constant. The variation of magnetizing reactance Xm is the main factor in the process of the voltage build-up and stabilization of the operating point of an SEIG. The value of Xm depends on magnetic saturation or air-gap flux, which in turn depends on the ratio of the air-gap voltage to frequency (Vg/a).
The steady-state performance of an induction generator is usually determined from its equivalent circuit. To simplify the analysis, the circuit of Fig. 3 is represented by three series impedances as shown in Fig. 4.
1 Z
2 Z 3
Z
s I
a Vg a
[image:2.595.36.289.286.438.2]Vt
Fig.4. Simplified representation of the equivalent circuit of Fig. 3 The impedances are given by
[
( ) ]
[image:2.595.331.542.498.617.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
3
[
]
The loop equation in Fig.2 is
( )
Under normal operating conditions, the stator current is not zero and thus
(1)
Note that the above equation must be satisfied for all operating conditions of the generator. By separating the real and imaginary parts of (1), the following two scalar equations can be obtained.
( ) (2)
( ) (3)
Note that (2) and (3) can provide the values of only the two unknowns. However, the circuit of Fig. 1 has five unknowns or adjustable parameters: magnetising reactance Xm, p.u speed b, p.u frequency a, shunt capacitive reactance Xc and load impedance ZL (for a given power factor). In general, (2) and (3) are simultaneously solved to obtain the values of Xc and a for the given values of b, Xm and ZL. In this study, this has been easily solved using Matlab-symbolic toolbox called „MuPad‟.
III. RESULTS AND DISCUSSIONS
In this study, two 3-phase induction machines having the same rated output power of 5.5 kW but with class efficiency of IE1 and IE3 are tested as SEIG.
A.Parameter Test
The no-load test, blocked-rotor test and V-I test has been carried out in both machines in order to determine their corresponding equivalent circuit parameters and the results are depicted in Table 1.
TABLE I
PARAMETERS OF THE MACHINE
Type R1 []
R2 []
Rc []
X1 []
X2 []
Xm []
Cmin [µF] IE1 2.98 2.64 1644 5.98 5.98 111 27
IE3 2.45 2.48 1914 5.94 5.94 149 20.5
B.Magnetization Curve
Based on the no-load test results, the magnetization curve of the two machines along with their corresponding excitation-capacitance lines are illustrated in Fig. The value of C can be selected for the given speed in such a way that the straight capacitance lines intercepts the magnetization curve at the point of the desired rated voltage of the SEIG. This means at intersection point 1 and 2 for IE1 and IE3 respectively, the necessary reactive power of SEIG is supplied only by their corresponding capacitors (the resonant point) which are inversely proportional to the slope of the lines [
] [4]. From the two machines
manufacturing design difference aspect, Fig.5 reveals that the magnetization curve of IE3 is slightly steeper than of IE1 and due to this IE1 machine require more excitation capacitor than IE3 to generate equal amount of voltage[see Fig.5].
Fig.5. Magnetizing curves of IE1 and IE3 operating as SEIG
C.Voltage Build Up Process
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
4
Fig.6 Voltage build-up process of IE1 and IE3 machines as SEIG
D.Response of SEIG for Resistive Load
The other important test which has been carried out during this study was observing how the two machines voltage will be affected when series steps of resistors are connected to them. Fig shows the response of these machines when the resistive loads are decreasing step by step and the result shows the voltage drop in IE3 machine is much faster than IE1 because of their narrow stable operating region than its counterpart.
Fig.7. Resistive load response comparison between IE1 and IE3 machines operating as SEIG
E.Effects of Increasing the Desired Voltage of the Machines on Active Power Delivery Capability
From the magnetization curve of the two machines it becomes clear that their capacitance lines are dependent on the selection of the desired voltage of the machine to operat as SEIG.
On the other hand , the capacitance lines of these machinches always should lie between two extreme lines i.e. the straight line slope passing through the origin and the tangent to the most sloped part of the magnetizaton curve in order to the self excitation process take place.
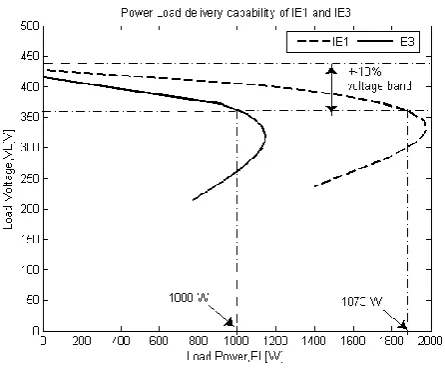
In this study two investigation approches has been followed. In 1st approch ,the investigation of the active power delivery capability of the two machies have been carried out at operating point 1 and 2 which corresponds the desired rated voltage of 400V[see Fig.5] and the result are depicted in Fig.8 The results show that the power delivery capability of the two machines are minimal but the IE1 machine delivery becomes double that of IE3 because of having more stable operation region.
Fig.8. Active power delivery capability of IE1 and IE3 at desired rated voltage of 400V within permissible operating voltage range of ±10%
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
[image:5.595.328.539.138.315.2]5
Fig.9. Magnetization curve for new operating points above desired rated voltage
Fig.10. Effect of 5% increment of desired rated voltage on active power delivery of the two machines as SEIG in permissible voltage range of
[image:5.595.50.280.142.330.2]±10%
Fig.11. Effect of 8% increment of desired rated voltage on active power delivery of the two machines as SEIG in permissible voltage
range of ±10%.
Fig. 12. Effect of 10% increment of desired rated voltage on active power delivery of the two machines as SEIG in permissible voltage
[image:5.595.326.549.364.544.2] [image:5.595.47.270.370.554.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
6
a)
[image:6.595.47.277.136.533.2]b)
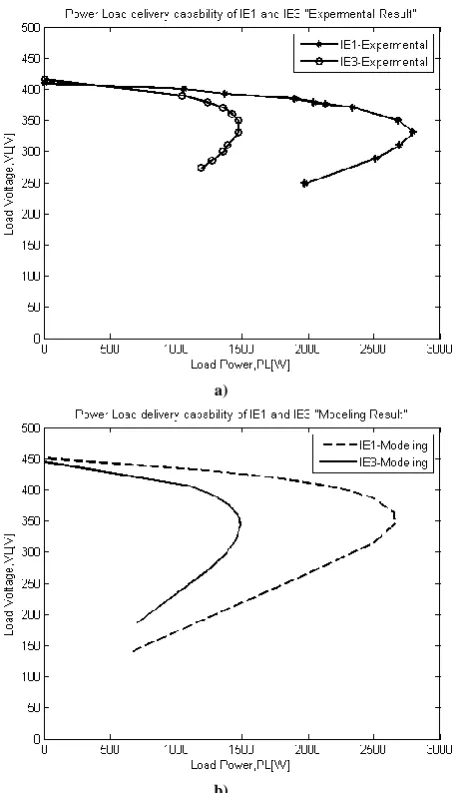
Fig.13. Active Power delivery capability comparison of IE1 and IE3 machines as SEIG.
[image:6.595.308.566.465.781.2]a) Experimental result and b) Modeling result Table II
Effects Of Increasing The Desired Rated Voltage By 5%, 8% And 10% On Active Power Delivery Capability Of The Two Machines Operating
As Seig Within Permissible Voltage Delivery Range Of ±10% Active power delivery capability in Watts /
Required Capacitance in µF
IE1 IE3
At rated voltage [400V]
1050/27 524/20.5
At +5% above Rated [420V]
1873 /31 1000/21.5
At +8% above Rated [432V]
2351/34 1172/22
At +10% above Rated [440V]
3030/39 1945/25
IV. SUMMARY AND CONCLUSIONS
In this paper attempt has been made to investigate the effects of efficiency class motors usage as SEIG and the results obtained suggested that the standard efficiency motors (IE1) were found better in many aspects in comparison with that of premium efficiency motors (IE3) in their implementation as SEIG for stand-alone system due to the following reasons:
1. From the magnetization curve of IE1 and IE3, it can be concluded that the IE3 machines are operating at near to unstable operation region than IE1 and hence they are more subjected to lose easily their stable operation region and are less suitable to be used as SEIG in standalone system.
2. The active power delivery capability and stable operation region of IE1 machine will increase significantly when it operates in relatively high saturation region in comparison to its counterpart IE3. Designing the machines to operates above the desired rated voltage is highly depend on the machines magnetization curve and the maximum current capacity the motor winding support within the given permissible voltage variation range.
3. From the design-materials consumption, dimensional size and weight comparison aspects, the IE1 machine is more suitable and economical than IE3 in stand-alone system application as SEIG (see APPENDIX-B & C).
APPENDIX-A
Nameplate Data Sheet for IE1 and IE3
Eff icie n cy C las s Vo lt ag e [V] P o we r , k W] Cu rre n t [A] F re q u en cy [Hz ] S p ee d , [r p m ] P o we r fa cto r Eff icie n cy a t F L, [ % ]
IE1 400, 5.5 11.4 50 1450 0.82 84.7 IE3 400, 5.5 10.5 50 1470 0.82 89.6
APPENDIX-B
Typical Material Composition of a 11 kW motor in class IE1 and IE2 [2]
11 kW motor, IE1 11 kW motor, IE2 Average
Kg/per kW
Average Kg/per kW Electrical steel 3.60 4.80
Other steel 0.95 1.00
Cast Iron* 1.30 1.30
Aluminium* 0.90 1.00
Copper 0.64 0.90
Insulation Material 0.02 0.02 Packaging Material 0.90 0.90 Impregnating resin 0.10 0.10
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
7
Note: The amount of material used increases with higher efficiency classes. Motors of efficiency class IE3 require a much greater use of materials than motors of efficiency class IE2. The purchasing price also increases for higher efficiency classes [2].
APPENDIX-C
Weight and Dimensional Size Comparison of IE1 and IE3 from Siemens and VEM manufacturers
5
.5
k
W
m
o
to
r,
IE1
[F
ro
m
S
iem
en
s]
5
.5
k
W
m
o
to
r,
IE3
[F
ro
m
S
iem
en
s]
5
.5
k
W
m
o
to
r,
IE1
[F
ro
m
VEM
]
5
.5
k
W
m
o
to
r,
IE3
[F
ro
m
VEM
]
Weight in kg 38 64 51 90 Frame size in mm 132s 132s 132 132 Axial length in mm 490 570 459 529
REFERENCES
[1] Sabar Nabar, E.Muljadi and F.Blaabjerg, “An overview of power Topologies for micro-hydro turbines”, 3rd IEEE international
symposium on power electronics for distributed generating systems (PEDG) 2012.
[2] Renewables 2013, Global Status report:
www.ren21.net/Portals/0/documents/Resources/GSR/2013/GSR2013 _lowres.pdf
[3] Singh B., Murthy S.S., Gupta S.: „Analysis and design of STATCOM-based voltage regulator for self-excited induction generators‟, IEEE Trans. Energy Convers., 2004, 19, (4), pp. 783– 790.
[4] M.Godoy Simoes and Felix A.Farat, “Renewable Energy Systems, design and analysis with induction generators”, CRC press, 2004. [5] Standards and legal requirements for the energy efficiency of
low-voltage three-phase motors, October 2010
[6] T.F. Chan, “Capacitance requirements of Self-Excited Induction Generators”, IEEE Trans. on Energy Conversion, Vol. 8, No. 2, pp. 304-310, June 1993.
[7] M.H.Haque, “Selection of capacitors to regulate voltage of a short-shunt induction generator”, IET Generation, Transmission, Distribution, 2009, Vol.3, pp.257-265.