Solutions to Midterm Quiz #1 (2004)
1. Hydroxyapatite is:a. a constituent material of bone, b. a ceramic,
c. synthesized for use in some orthopaedic implants, or
d. all of the above. (10 pts)
The answer is d. all of the above. See pp. 14–15 of Lecture Notes #4 and p. 17 of Lecture Notes #5, as well as p. 344 & p. 356 of Berger et al.
2. A material’s fatigue endurance limit is:
a. the number of loading cycles at which it suffers a fatigue fracture, b. the strain at which it undergoes a permanent plastic deformation, c. the strength at which it exhibits no further fatigue, or
d. the bending moment at which it breaks. (10 pts)
The answer is c. the strength at which it exhibits no further fatigue. See pp. 7–8 of Lecture Notes #9, as well as p. 374 of Berger et al.
3. When implanting a joint prosthesis made of stainless steel, an orthopaedic surgeon must be careful not to damage the metal alloy’s chromium dioxide coating. Such damage could compromise the implant’s:
a. biocompatibility, b. shiny, new look, c. elastic modulus, or
d. strength. (10 pts)
4. A negative net joint power is sufficient to indicate that the joint is: a. in the process of extending,
b. absorbing power,
c. subject to an isometric muscle contraction, or
d. injured. (10 pts)
The answer is b. absorbing power. See p. 18 of Lecture Notes #7, as well as pp. 397–398 of Berger et al. Note that in the example given the joint is extending, but the sign of the joint power is negative because the net joint moment is in the opposite direction. It is also possible to have a negative net joint power when the joint is flexing, if the net joint moment is in the opposite direction.
5. Explain why skin scar tissue has quite different mechanical properties to normal skin, whereas healed bone has the mechanical properties of normal bone. (15 pts)
Skin normally has a random orientation of collagen fibers, which gives a very rubbery elasticity (see p. 21 of Lecture Notes #4, as well as p. 347 of Berger et al.). When skin is damaged and skin scar tissue forms, the collagen fibers are more aligned giving a stiffer elasticity (this was discussed in Lecture #4). In contrast, bone is continually undergoing a repair process referred to as remodelling (see p. 16 of Lecture Notes #4, as well as p. 346 of Berger et al.), such that healed bone has normal mechanical properties.
6. Explain why body mass has relatively little effect on the optimal walking speed for a person. (15 pts)
The optimal walking speed is based primarily on the exchange of kinetic energy with gravitational potential energy and back again (see p. 13 of Lecture Notes #7, as well as p. 394 of Berger et al.). Both kinetic energy and gravitational potential energy are directly proportional to body mass (see p. 10 of Lecture Notes #7, as well as p. 391 of Berger et al.), and consequently this energy exchange can be considered as an exchange between the velocity and the vertical height of the center of mass, independent of the body mass.
An alternative argument can be made from the inverted pendulum model (see p. 12 of Lecture Notes #7, as well as p. 394 of Berger et al.), in which the movement of the center of mass in a circle is dependent on the acceleration due to gravity (this was discussed in Lecture #7) but not on the body mass.
a. Derive a mathematical expression for the joint moment M (Newton·metre) that the shoulder muscles must produce to hold the arm extended at a fixed angle θ degrees from the side of the body. Assume that the arm has mass m kilogram and a center of mass that is metre from the shoulder joint. r
b. Why is it easier to hold the arm out at 45° below horizontal (i.e., ) than 45° above
horizontal (i.e., )? (15 pts)
45
θ = D 135
θ = D
a. The moment produced by gravity is:
( )
sin
M =mgr θD or M =mgrcos 90
(
D−θD)
,and consequently an equal moment M in the opposite direction is required to keep the arm held at a fixed angle.
θ
F=mg
r
r sin(
θ
)
M
b. The joint moment that must be produced by the muscles at each of these angles is identical:
( )
( )
2sin 45 sin 135
2
M =mgr D =mgr D =mgr .
8. A widely-used empirical form for nonlinear stress-strain relations in biological materials is: ,
n C
τ = ² (1)
where τ is the uniaxial stress, ² is the uniaxial strain, and C & n>1 are constants.
a. Show that the stress-strain relation given by Eqn. (1) does not strictly obey Fung’s relationship:
(
1 2
d
,
d k k
)
τ τ
= +
Λ (2)
where Λ = +² 1 is the stretch ratio and k1 & k2 are constants.
b. Show that if n1, then Fung’s relationship is approximately true for Eqn. (1). (15 pts) a. Substituting ²= Λ −1 into Eqn. (1) gives:
(
1 .)
n Cτ = Λ −
Taking the derivative w.r.t. Λ:
(
)
(
) (
)
1 1 1 1 1 1 d 1 d 1 1 , n n n n n C nC n C nC τ τ τ τ − − ⎛ ⎞ ⎜ ⎟ ⎝ ⎠ −= Λ − Λ
= Λ − Λ −
=
we observe that the derivate is not a linear function of τ , and consequently Fung’s relationship is not obeyed.
b. For n1, we observe that 1 1
n
− ≈1 , giving τ1−1n ≈τ . Now the derivate is approximated by Fung’s relationship with k1=nC1n and
2 0
k = .
An alternative argument can be made from the general solution to the stress-strain relationship obtained by integrating Fung’s relationship (see Tutorial #1), which was an exponential function of the strain. The Taylor series expansion of an exponential function can be used to argue that the slope of a function proportional to the strain raised to a large power, such as Eqn. (1) with n1, will be close to the slope of an exponential function of the strain.
Solutions to Midterm Quiz #1 (2005)
1. Cross-links in polymer biomaterials:a. increase the material’s stiffness,
b. produces bands in electron microscope images of the material, c. decrease the material’s stiffness, or
d. are produced by adipocytes. (5 pts)
The answer is a. increase the material’s stiffness. See pp. 8–9 of Lecture Notes #4 (or p. 341 of Berger et al.).
2. The biocompatibility of a synthetic biomaterial refers to: a. its toxicity in the human body,
b. the immune system response that it elicits,
c. its mechanical compatibility with the surrounding biological tissue(s), or
d. all of the above. (5 pts)
The answer is d. all of the above. See p. 2 of Lecture Notes #6 (or p. 349 of Berger et al.).
3. During running, the maximal joint power production is typically largest in the: a. hip,
b. knee, c. ankle, or
d. wrist. (5 pts)
The answer is c. ankle. See p. 22 of Lecture Notes #7 (or p. 349 of Berger et al.).
4. Electromyogram (EMG) measurements best predict muscle force generation for: a. isotonic contractions,
b. isometric contractions, c. isotropic contractions, or
d. isobaric contractions. (5 pts)
5. The best type of vascular graft for a blood vessel with a diameter of 2.5 mm is a: a. synthetic vessel made from PET/Dacron,
b. synthetic vessel made from PTFE, c. vessel autograft, or
d. glass tube. (5 pts)
The answer is c. vessel autograft. See p. 14 of Lecture Notes #5 (or p. 356 of Berger et al.) and slide 16 of Student Presentation #1.
6. The major factor in determining a person’s natural walking speed is their: a. weight,
b. leg length, c. shoe size, or
d. IQ. (5 pts)
The answer is b. leg length. This was discussed in Lecture #7 as a result of the inverted pendulum model of walking and the efficient conversion between kinetic and potential gravitational energy. See pp. 10–15 of Lecture Notes #7 (or pp. 393–394 of Berger et al.)
7. The force generated in a muscle contraction is a function of: a. the speed of the contraction,
b. the length of the muscle relative to its resting length, c. the level of neural activation, or
d. all of the above. (5 pts)
The answer is d. all of the above. See p. 10 of Lecture Notes #8 (or p. 405–408 of Berger et al.).
8. The major factor limiting the lifetime of a joint prosthesis with components made from titanium alloy and polyethylene is likely to be:
a. wear of polyethylene components, b. corrosion of titanium alloy components, c. fatigue of titanium alloy components, or
d. degradation of polyethylene components by the immune system. (5 pts) The answer is a. wear of polyethylene components. This was discussed in Tutorial #1 and in Student Presentation #7. Note that titanium alloy is not prone to corrosion (discussed in Student Presentations #3 and #7) and exhibits an endurance limit such that it can have an infinite lifetime (see p. 8 of Lecture Notes #9). Note also that polyethylene is not prone to degradation by the immune system (see p. 4 of Lecture Notes #6).
lifetime. (15 pts) If a fatiguing material has an endurance limit (an asymptotic strength at which the material stops fatiguing) and the maximum stress to which the material will be subjected is below the endurance limit, then the material can be said to have an infinite lifetime.
10.Briefly discuss the bioethical issues that could arise from having biomedical technologies for diagnosing and treating a particular medical condition that are both very expensive.
(15 pts) Major issues include:
i. Are the costs so high that they will not be covered by public and private health coverage, in which case the diagnosis and treatment would only be affordable for the rich?
ii. If the costs can be covered by public or private health coverage, then the diagnosis and treatment of this particular condition will be doubly expensive, so proportionally more money may be spent on diagnosing and treating this group of patients, reducing the amount of money available to diagnosis and treat other patients.
11.A nonlinear stress-strain relation used for some soft tissues is:
(
)
, 1 K τ = − a ²² ² (1)
where τ is the uniaxial stress, ² is the uniaxial strain, and K & ²a are constants. a. Explain the physical significance of the constants K and ²a in Eqn. (1).
b. Show that the stress-strain relation given by Eqn. (1) does not obey Fung’s relationship:
(
1 2
d
,
d k k
)
τ = τ +
Λ (2)
where Λ = +² 1 is the stretch ratio and k1 & k2 are constants. (15 pts) a. For values of ²²a, the denominator of Eqn. (1) is approximately equal to one and τ ≈K², so
is the approximate elastic modulus for small strains. K
As , the denominator of Eqn. (1) approaches zero and the stress grow infinitely large,
such that the stress must exceed the strength of the material as . Consequently, the
strain at failure must be just below . → a ² ² → a ² ² a ²
Note that it is physically impossible for to exceed ² ²a.
b. To obtain the derivative of τ with respect to Λ we note that according to the chain rule:
(
)
(
)
2(
)
2d d d d
1
d d d d
.
1 1 1
K K K
τ = τ ⋅ = τ ⋅
Λ Λ
= + =
− a ⎡⎣ − a ⎤⎦ ⎡⎣ − ⎤⎦
a a
²
² ²
² ²
² ² ² ² ² ²
, (3)
To obtain the derivative formulated as a function of τ , as is required for comparison with Fung’s relationship, we solve for as a function of ² τ using Eqn. (1):
, τ τ = + a a ² ²
K² (4)
and substitute into Eqn. (3) to give:
2 d . d 1 K K 2 τ τ τ τ = =
Λ ⎛ ⎞ ⎛
− ⎜ + ⎟ ⎜ + ⎝ ⎠ ⎝ a a a K² K² K² ⎞ ⎟ ⎠ (5)
In Eqn. (5), the derivative is clearly not a linear function of τ , and consequently Fung’s relationship does not hold.
can be described by:
( )
2( )
2 sin 2 , 0 0.5, z
v t = − πt ≤ ≤t
where the vertical velocity is in units of meter/second and the time t is in units of second.
( )
z
v t
a. Calculate the vertical component of the ground reaction force, Fgz
( )
t , that would be measured as a result of this movement.b. Describe in words the vertical movement (i.e., the change in vertical displacement) that
the COM makes over the period 0≤ ≤t 0.5. (15 pts)
a. To find Fgz
( )
t we first take the derivate of the vertical velocity v tz( )
w.r.t. time, to find the vertical acceleration a tz( )
of the COM:( )
d( )
( )
( )
( )
4 sin 2 2 cos 2 4 sin 4 . d
z z
v t
a t t t t
t π π π π π
= = − ⋅ ≡ −
The vertical component of the ground reaction force is then:
( )
( )
( )
( )
(
( ) ( )
( )
80 9.8 80 4 sin 2 2 cos 2 80 9.8 80 4 sin 4
784 640 sin 2 cos 2 784 320 sin 4 .
gz z
F t mg ma t
t t
t t t
)
t
π π π π π
π π π π π
= +
= ⋅ − ⋅ ⋅ ≡ ⋅ − ⋅
= − ≡ −
Page 1 of 7
Electrical Engineering 3BA3: Structure of Biological Materials
Solutions to Midterm Quiz #1 (2006)
1. In bioethics, the term nonmaleficence refers to: a. the principle of avoiding doing harm, b. death with dignity,
c. the principle of doing good, or
d. the study of moral judgements. (5 pts)
The answer is a. the principle of avoiding doing harm. See notes from Class Discussion #1 (or p. 40 of Enderle et al.).
2. Ligaments have a lower elastic modulus than tendons because ligaments have: a. less elastin and proteoglycans than do tendons,
b. randomly oriented collagen fibers,
c. more elastin and proteoglycans than do tendons, or
d. collagen with no cross links between polymer chains. (5 pts) The answer is c. more elastin and proteoglycans than do tendons. See pp. 18–19 of Lecture Notes #3 (or pp. 346–347 of Berger et al.).
3. The occurrence of a positive net joint power is sufficient to determine that a joint is: a. in the process of extending,
b. subject to an isometric muscle contraction, c. in the process of flexing, or
d. none of the above. (5 pts)
The answer is d. none of the above. The net joint power is the product of the net joint moment and the joint angular velocity. See p. 18 of Lecture Notes #6 (or p. 397 of Berger et al.). An isometric muscle contraction is one in which the muscle length does not change, so there will normally be no resulting movement of the joint. Consequently, the joint angular velocity will be zero and thus the net joint power will be zero. So answer b. cannot be correct. In the case of flexion or extension, the sign (i.e., direction) of the angular velocity is known, but in order to determine if the net joint power is positive, the net joint moment must be known. This is not given, so it is not possible to determine whether the joint is extending or flexing.
a. greater wear, b. less wear,
c. lower average stress in the materials, or
d. higher average stress in the materials. (5 pts)
The answer is a. greater wear. See p. 13 of Lecture Notes #8 (or p. 383 of Berger et al.). Note that the average stress is dependent on the average cross-sectional area of the material normal to the applied forces, not the contact area.
5. The mechanical properties of most bones in the human body are: a. isotropic and homogeneous,
b. anisotropic and inhomogeneous, c. isotropic and inhomogeneous, or
d. anisotropic and homogeneous. (5 pts)
The answer is b. anisotropic and inhomogeneous. Bones are typically inhomogeneous, with some areas of trabecular (porous/spongy/cancellous) bone and some areas of cortical (compact) bone. See p. 15 of Lecture Notes #3 (or pp. 345–346 of Berger et al.) and sl. 2 of Student Presentation #2. It was also mentioned in Lecture #3 that bone is anisotropic—see Table 8.2 of Berger et al.
6. Encapsulation of a recording or stimulating electrode inserted in biological tissue by new bone growth is problematic because it:
a. decreases the resistance of the tissue between the electrode and the excitable cells, b. decreases the inductance of the tissue between the electrode and the excitable cells, c. increases the capacitance of the tissue between the electrode and the excitable cells, or d. increases the resistance of the tissue between the electrode and the excitable cells. (5 pts) The answer is d. increases the resistance of the tissue between the electrode and the excitable cells. See p. 7 of Lecture Notes #5.
7. Titanium alloys are preferable to cobalt-chromium alloys for use in biomaterial applications where:
8. A motor neuron axon innervates: a. a single muscle fiber,
b. a single myofibril,
c. a whole muscle fasciculus, or
d. only muscle fibers of one class (fast twitch or slow twitch). (5 pts) The answer is d. only muscle fibers of one class (fast twitch or slow twitch). This was discussed in Lecture #7. A motor neuron innervates several muscle fibers, and collectively they are referred to as a motor unit. Motor neurons with small diameter axons innervate small, slow-twitch muscle fibers, and large diameter axons innervate large, fast-twitch muscle fibers.
9. Briefly compare and contrast the biocompatibility of nylon and polyethylene. (15 pts) Nylon and polyethylene are both fairly biocompatible. However, nylon’s NH2 terminal group makes it look more like a protein, and consequently it is more susceptible to degradation by the immune system. On the other hand, because polyethylene is impregnable (i.e., inert), biological tissue does not easily adhere to it, whereas tissue tends to adhere to nylon. Whether tissue adherence is advantageous or disadvantageous will depend on the application. See pp. 4 & 11 of Lecture Notes #5 (or p. 350 of Berger et al.)
10.Briefly discuss the difficulties with increasing the number of functional degrees of freedom in
limb prostheses. (15 pts)
legs extended off the ground at an angle θ , as illustrated below:
θ
M
aM
psit-up
The joint moment M is a by-product of the anterior (stomach and anterior leg) muscles a involved in trying to do the sit-up (i.e., raise the torso). If i) Ma =90 N m⋅ and ii) the legs have a total mass of 25 kilogram and their center of mass is 0.3 meter from the hip joint: a. What magnitude of joint moment M produced by the posterior (back, buttock and p
posterior leg) muscle is necessary to keep the legs at a fixed angle θ off the ground? b. Is it harder to do the sit-up and keep the legs from moving when θ is small or when θ is
large? Try to discuss all the possible contributing factors. (15 pts) a. The net joint moment is Ma−Mp. The only other moment acting on the legs is Mw, the
moment due to the weight of the legs. For the total leg mass m, center of mass and angle r θ given above, this moment is:
cos 25 9.8 0.3cos
73.5 cos N m,
w w
M F a mg r θ θ
θ
= = ⋅ = ⋅ ⋅
= ⋅
where a=rcosθ is the moment arm, as illustrated below.
θ
M
a
sit-up
0.3 m
F
If the legs are stationary, then the total moment balance is:
0
90 73.5 cos 0
90 73.5 cos N m.
a p w
p p
M M M
M
M
θ θ
− − =
⇒ − − =
⇒ = − ⋅
component of the ground reaction force over a 0.3 second period can be described by:
( )
2700sin , 0 0.3,
gy
t
F t t
d
π
⎛ ⎞
= ⎜ ⎟ ≤
⎝ ⎠ ≤
where the horizontal ground reaction force Fgy
( )
t is in units of Newton, the time is in units of second and the constant has a value of 0.5 second.t
d
a. What is the horizontal velocity of the person’s center of mass after the 0.3 seconds has elapsed?
b. How far has the person’s center of mass moved horizontally after the 0.3 seconds has
elapsed? (15 pts)
a. The horizontal acceleration of the COM is:
( )
( )
210sin , 0 0.3.
y gy
t
a t F t m t
d
π
⎛ ⎞
= = ⎜ ⎟ ≤ ≤
⎝ ⎠
Integrating ay
( )
t from time t0 =0 to time gives the horizontal velocity as a function of time: t( )
( )
( )
( )
0 0 0 0 d 20 10 sin d
5 2
0 cos
5 2 2 0
cos cos
5 2
cos 1
t
y y t y
t y
t
v t v t a s s
b. Integrating from time to time t gives the horizontal displacement as a function of
time:
( )
y
v t t0 =0
( )
( )
( )
( )
0 0 0 0 d 5 20 1 cos d
5 2
0 sin
2
5 2 2
sin 0 sin
2 2 5 2 sin 0 2 5 2 sin 2 t
y y y
t t y
t
d t d t v s s
d s
d s
d
d d s
s
d
d d t d
t
d d
d d t
t
d
d d t
t π π π π π π π
π π π
π π π π π π = + ⎧ ⎛ ⎞⎫ = + ⎨ − ⎜ ⎟⎬ ⎝ ⎠ ⎩ ⎭ ⎡ ⎧ ⎛ ⎞⎫⎤ = +⎢ ⎨ − ⎜ ⎟⎬⎥ ⎝ ⎠ ⎩ ⎭ ⎣ ⎦ ⎡⎧ ⎛ ⎞⎫ ⎧ ⎛ ⎞ ⎤ = ⎢⎨ − ⎜ ⎟⎬ ⎨− − ⎜ ⎟ ⎥ ⎝ ⎠ ⎝ ⎠ ⎩ ⎭ ⎩ ⎣ ⎦ ⎡⎧ ⎛ ⎞⎫ ⎤ = ⎢⎨ − ⎜ ⎟⎬− ⎥ ⎝ ⎠ ⎩ ⎭ ⎣ ⎦ = −
∫
∫
0 ⎫ ⎬ ⎭, 0 t 0.3.
d
⎡ ⎛ ⎞⎤ ≤ ≤
⎜ ⎟
⎢ ⎝ ⎠⎥
⎣ ⎦
Electrical Engineering 3BA3: Structure of Biological Materials
Solutions to Midterm Quiz #1 (2007)
1. A synthetic biomaterial is a composite of Material #1 with an elastic modulus of and Material #2 with an elastic modulus of
1 80 GPa
E = E2 =1.3 GPa. If the composite’s
volume is 20% Material #1 and 80% Material #2, then the elastic modulus E of the composite is:
a. less than 18 GPa, b. more than 1.6 GPa,
c. dependent on how the two materials are arranged in the composite, or
d. all of the above. (5 pts)
The answer is d. all of the above. See notes from Tutorial #1 (or p. 359 or p. 381 of Berger et al.).
2. The natural biomaterial keratin, found in human hair, is stiffer than collagen because: a. it is a non-metallic mineral,
b. it has more cross-links, c. it absorbs less water, or
d. none of the above. (5 pts)
The answer is b. it has more cross-links. See slide 13 from Lecture #3 (or p. 344 of Berger et al.).
3. The final stage of wound repair is : a. inflammation,
b. remodelling, c. proliferation, or
d. coagulation/haemostasis. (5 pts)
The answer is b. remodelling. See slide 4 from Lecture #5 (or p. 346 of Enderle et al.).
4. During running, the runner’s vertical velocity is typically maximal: a. at the middle of the stance phase,
b. towards the end of the stance phase,
c. just after the back foot leaves the ground, or
Page 2 of 9
5. The stress-life diagram for a material is normally created by:
a. cyclically applying a fixed load until the material fractures and repeating this procedure for a range of loads with a new sample of the material each time,
b. applying a steadily increasing load until the material fractures,
c. cyclically applying a load, starting with a high load and reducing the load whenever fracturing appears imminent, or
d. applying a cyclic load and measuring when the material wears through. (5 pts) The answer is a. cyclically applying a fixed load until the material fractures and repeating this procedure for a range of loads with a new sample of the material each time. See slides 17–20 from Lecture #8 (or p. 67 or p. 375 of Berger et al.).
6. During running, the maximal joint power production is greater in the ankle than in the knee because:
a. the ankle’s maximal joint moment during running is much greater than the knee’s, b. the time during which the knee’s joint moment is positive is more spread out, c. the knee only absorbs power during running, or
d. the ankle’s rotational velocity is greater during the maximal joint moment. (5 pts) The answer is d. the ankle’s rotational velocity is greater during the maximal joint moment. The maximal joint moments are of similar magnitude (around 200 N·m), the durations of the positive joint moments are similar, and the knee produces power as well as absorbing it, so the answer must be that the ankle’s rotational velocity is greater. See slide 11 from Lecture #8 (or p. 400 of Berger et al.).
7. In function electrical stimulation for drop foot, the initial site of action potential generation is normally in:
a. a motor neuron axon, b. the sarcoplasmic reticulum, c. a muscle fiber, or
d. the motor cortex. (5 pts)
The answer is a. a motor neuron axon. See Student Presentation #3.
8. The force that a muscle can generate as a function of its length is maximal when the muscle is at its natural length because:
a. more fast-twitch fibers are recruited at this length, b. of the faster oxidative metabolism at this length,
c. a greater number of motor units are activated at this length, or
d. of the optimal overlap of actin and myosin filaments at this length. (5 pts) The answer is d. of the optimal overlap of actin and myosin filaments at this length. See slide 14 from Lecture #7 (or p. 407 of Berger et al.).
9. Discuss the bioethical complexities of choosing subjects for clinical trials of biomedical technologies to treat life-threatening diseases. (15 pts) The main complexities arise from the possibly-competing goals of obtaining the best measurement of benefit and minimizing risk for the patients (non-maleficence). If the technology has some substantial risk of (i) not working sufficiently to keep the patient alive or (ii) having harmful side-effects, then the only suitable subjects might be those patients for whom all other treatment options have failed and are likely to die soon. However, if such patients are chosen as subjects, then they may be so sick that (a) the full benefit of the technology is not clearly displayed or (b) they die anyway, and it may be difficult to determine whether the biomedical technology contributed to the death or not. Healthier subjects may better display the benefit of the technology, but the risks may be too great, or there may be other viable treatment options still available.
10.Explain why platinum-iridium alloys are often the preferred material for implanted
stimulating electrodes. (15 pts)
Page 4 of 9
11.A sprinter is positioned in their starting blocks as illustrated below.
Assume the following:
i. The side cross-section of the starting blocks (as illustrated) is an equilateral triangle. ii. The runner is at rest for time t<0 and then begins to propel themselves forward at time
0
t= .
iii. Once the runner begins propelling themselves forward, they lift their hands immediately (i.e., at time t=0).
iv. The total ground reaction force at the starting blocks is normal to the front surface of the blocks and acts through the center of mass (COM) of the sprinter.
v. The total ground reaction force magnitude at the starting blocks has a constant value of 5 kN
g from time t =0 to time t 0.1 s
F = = .
vi. The runner has a mass of 90 kg, and the acceleration due to gravity is g=9.8 m s2 .
What is the increase in the total mechanical energy of the runner’s COM from time t=0 to
time t=0.1 s? (15 pts)
The internal angles between the sides of an equilateral triangle are all 60°, and thus, the front surfaces of the starting blocks are inclined at an angle of 30° from vertical. The ground reaction force (GRF) Fg, which is normal to the front surface of the blocks, is consequently angled 30° from horizontal, as illustrated below. The horizontal and vertical components of the GRF are thus:
( )
cos 30 4.33 kN, for 0 0.1 s, gy g
F =F D = ≤ ≤t
and:
( )
sin 30 2.5 kN, for 0 0.1 s, gz g
F =F D = ≤ ≤t
respectively.
The horizontal acceleration ay, dependent only on Fgy, is given by:
3 2
4.33 10 90 48.11 m s , for 0 0.1 s. y gy
a =F m= × = ⋅ − ≤ ≤t
Consequently, the horizontal velocity vy
( )
t varies as a function of time according to:( )
( )
10 0
0 d 0 48.11 d 48.11 m s , for 0 0.1 s,
t t
y y y
v t =v +
∫
a ⋅ s= +∫
⋅ s= t ⋅ − ≤ ≤tsuch that at time t=0.1 s, 1
4.811 m s . y
v = ⋅ −
The vertical acceleration az, dependent on Fgz and the force due to gravity, is given by:
3 2
2.5 10 90 9.8 17.98 m s , for 0 0.1 s. z gz
a =F m− =g × − = ⋅ − ≤ ≤t
Consequently, the vertical velocity v tz
( )
varies as a function of time according to:( )
( )
10 0
0 d 0 17.98 d 17.98 m s , for 0 0.1 s,
t t
z z z
v t =v +
∫
a ⋅ s= +∫
⋅ s= t ⋅ − ≤ ≤tsuch that at time t =0.1 s, 1
1.798 m s . z
v = ⋅ −
The vertical displacement , relative to the initial height of the COM, varies as a function of
time according to:
( )
z
d t
( )
( )
20 0
0 d 0 17.98 d 8.99 m, for 0 0.1 s,
t t
z z z
d t =d +
∫
v ⋅ s= +∫
s⋅ s= t ≤ ≤tsuch that at time t=0.1 s, dz =0.0899 m.
The initial horizontal and vertical velocities are zero, and hence the initial kinetic energy is zero. The increase in kinetic energy at time t=0.1 s is thus:
(
)
(
)
(
)
(
)
2 2 2 n 2 ki 1 10.1 s 0.1 s 0.1 s
2 2 1 90 2 1. 4.811 19 kJ, 1.798 z y
t m mv t
E = v t= +
= +
=
= =
and the increase in gravitational potential energy at time t=0.1 s is:
(
)
(
grav 0.1 s 0.1 s
90 9.8 0.0899
79.28 J, z
t d t
E = mg =
= ⋅ ⋅
=
=
)
Page 6 of 9
The calculation of the GRF angle is illustrated below for a single block. Note however that the GRF magnitude for the two blocks combined was given in the question, and the combined GRF
was assumed to act directly through the sprinter’s COM.
60°
F
gF
gyF
gz30°
12.A new metal alloy being developed for orthopaedic implants has a tensile stress-strain relationship given by:
500
2
1 GPa, for 0 ,
1 e ε c
τ = − − ≤ ≤ε ε
+
where τ is the tensile stress (in units of GPa), ε is the tensile strain, and εc is the strain at failure.
a. If the ultimate tensile strength is 950 MPa, what is the strain at failure εc? b. What is the elastic modulus E for the linear portion of the stress-strain curve?
c. Find the yield stress, if it is defined as the stress at which the slope of the stress-strain curve is only 40% of the slope of the linear portion. (15 pts) a. According to the given equation, the stress at failure, referred to as the ultimate tensile strength
(UTS), is:
500
2
0.95 1 GPa
1 e− εc
= −
+ .
Solving for εc gives:
(
)
( )
( )
500 500 500 500 500 0.05 1.95 3 0.05 1.95 2 0.95 1 1 e 2 1.95 1 e1.95 1 e 2
2 1 e
1.95
2 2 1.95 0.05
e 1
1.95 1.95 1.95
500 log
log 500 7.327 10 . c c c c c c e c e ε ε ε ε ε ε ε − − − − − − = − + ⇒ = + ⇒ + = ⇒ + = − ⇒ = − = = ⇒ − = ⇒ = − = ×
b. The stress-strain curve is linear for small ε and becomes non-linear at higher strains. Therefore, the elastic modulus E for the linear portion of the stress-strain curve is the slope of the curve at ε =0. The derivate of the given equation is:
( )
(
)
(
)
(
)
500 2 500 500 2 5002 1 500 e
d
d 1 e
1000 e
GPa, for 0 .
1 e c
Page 8 of 9
Evaluating the derivate at ε =0 gives:
(
)
(
)
500 0
2 2
500 0 0
d 1000 e 1000 1
250 GPa.
d 1 e 1 1
E ε τ ε − ⋅ − ⋅ = ⋅ ⋅ = = = = + +
Alternatively, the elastic modulus can be estimated from the ratio of τ to ε for extremely small values of ε:
(
500)
32 1
, for 1 10 . 1 e
E τ ε ε
ε ε ε
− −
≈ = − ×
+
Evaluating this expression for ε = ×1 10−5 gives:
(
5)
55 500 10
2 1
249.9995 250 GPa. 1 10
1 10 1 e
E − −
− − ×
≈ − = ≈
×
× +
c. The slope at the yield strength (YS) is 40% of 250 GPa, i.e., 100 GPa. The yield strain εy, the strain at which the slope is 100 GPa, can be found according to:
(
)
(
)
(
)
(
)
500 2 500 2 500 500 2500 500 500
2
500 500
1000 e
100 GPa
1 e
1 e 10 e
1 2e e 10 e
1 8e e 0.
y
y
y y
y y y
y y
ε ε
ε ε
ε ε ε
ε ε − − − − − − − − − ⋅ = + ⇒ + = ⋅ ⇒ + + = ⋅ ⇒ − + =
This is a quadratic equation with the solutions:
( ) ( )
2500 8 8 4 1
e
2 1
8 64 4
2
7.873 or 0.1270. y ε − =− − ± − − ⋅ ⋅ ⋅ ± − = = 1
Solving for εy gives:
3
500 log 7.873 or log 0.1270
log 7.873 log 0.1270 or
500 500
log 7.873 log 0.1270 or
500 500
4.127 10 .
y e e
e e y e e ε ε − − = − − = − − = = ± × ⇒
Since εy is a tensile strain, it must be the positive value. Solving for the stress at gives a yield strength of:
3
10
ε × −
4.127 =
3
500 4.127 10
2
1 0.7746 GPa 774.6 MPa. 1 e
τ = − ⋅ × − − = =
+
The results are shown graphically in the figure below.
0 1 2 3 4 5 6 7 8
x 10−3 0
0.5 1
ε
Stress−strain curve
τ
(GPa)
0 1 2 3 4 5 6 7 8
x 10−3 0
100 200
ε
Slope of stress−strain curve
d
τ
/d
ε
(GPa)
εy
YS
UTS
εy
εc
Page 1 of 10
Electrical Engineering 3BA3: Structure of Biological Materials
Solutions to Midterm Quiz #1 (2008)
1. Tendons and ligaments:
a. have very rubbery stress-strain relationships,
b. contain a greater proportion of elastin than collagen, c. have fairly crystalline stress-strain relationships, or
d. are manufactured by chondrocytes. (5 pts)
The answer is c. have fairly crystalline stress-strain relationships. Fig. 8.3 of Berger et al. shows that tendons and ligaments have very little curvature in their stress-strain relationships. When compared to other tissue such as cartilage and skin that exhibit very rubbery elasticity, then tendon and ligament must be considered to be fairly crystalline (see curves marked T and L in Fig. 8.6 on slide 22 of Lecture #3 and text on pp. 346–347 of Berger et al.).
2. Maintenance of healthy bone requires the normal functioning of: a. fibroblasts only,
b. osteoclasts only, c. osteoblasts only, or
d. both osteoblasts and osteoclasts. (5 pts)
The answer is d. both osteoblasts and osteoclasts. See slide 16 of Lecture #3 or pp. 345–346 of Berger et al.
3. The first stage of wound repair is : a. inflammation,
b. remodelling, c. proliferation, or
d. coagulation/haemostasis. (5 pts)
The answer is d. coagulation/haemostasis. See slide 4 of Lecture #5.
4. Carbon materials have not been successful utilized in orthopaedic implants because: a. they all have very poor biocompatibility,
b. nobody has thought of it yet,
c. it is not yet possible to obtain suitable mechanical properties, or
d. they are much too heavy. (5 pts)
The answer is c. it is not yet possible to obtain suitable mechanical properties. See slide 20 of Lecture #4 or pp. 357–358 of Berger et al.
5. To prevent infection, synthetic biomaterials: a. must be sterilized using steam under pressure, b. must be sterilized using radiation,
c. must be sterilized using ethylene oxide gas, or
d. can be sterilized using any of the above. (5 pts)
The answer is d. can be sterilized using any of the above. See slide 16 of Lecture #5 or p. 349 of Berger et al.
6. The chemical acetylcholine (ACh) is:
a. the neurotransmitter used in neuromuscular junction (i.e., the synapse between a motor neuron and a muscle fiber),
b. a constituent chemical of nylon,
c. present in fast glycolytic muscle fibers but not in slow oxidative fibers, or
d. the chemical that causes myosin filaments to move along actin filaments in myofibrils. (5 pts)
The answer is a. the neurotransmitter used in neuromuscular junction (i.e., the synapse between a motor neuron and a muscle fiber). See slides 5 & 6 of Lecture #7.
7. In a normal running motion, the hip joint:
a. has a much higher maximum power than the maximum knee or ankle power, b. only produces power,
c. only absorbs power, or
d. is mainly involved in placing the leg in the correct position for each phase of the stance. (5 pts)
Page 3 of 10
8. Thin split-thickness skin grafts:
a. damage the donor site more than do full-thickness grafts,
b. can be stretched to cover a greater recipient area than can full-thickness grafts, c. include only a portion of the epidermis and none of the dermis, or
d. look like normal skin immediately after transplantation. (5 pts) The answer is b. can be stretched to cover a greater recipient area than can full-thickness grafts. See slides 26–30 of Student Presentation #3.
9. Discuss briefly:
a. why cost-benefit analysis is important for the application of technology to healthcare, and b. how the cost-benefit analysis of technology to treat a non-life-threatening condition could
be compared to that for a life-threatening condition. (15 pts) a. Cost-benefit analysis is primarily used in healthcare to determine how to distribute the budget
of a government healthcare program, an insurance scheme or a hospital across all the possible expenses in a fair and efficient manner. For example, it may be feasible to provide an expensive treatment if the number of patients requiring it is small, but a substantial benefit would need to be justified if an expensive treatment were to be proscribed for a large patient population. However, in a healthcare system with a limited budget, this would take away resources from other budget areas. Therefore, the relative cost and benefit of different treatments needs to be considered. In order to make comparisons across different forms of treatment, factors such as quality of life and life expectancy typically end up being given a monetary value in practice. While this may seem somewhat callous, it is required to equitably allocate resources amongst all possible healthcare costs.
An important feature of cost-benefit analysis is to determine what may be hidden costs or benefits. For example, an expensive surgery may end up costing less in the long run than not performing the surgery and subsequently needing to hospitalize or provide drugs for the patient over a long period of time.
Cost-benefit analysis is also performed by manufacturers of biomedical technologies to demonstrate how a new treatment would affect a healthcare budget.
b. While we might wish to save a human life at any cost, in practice it is necessary to balance the resources allocated to emergency rooms, intensive care units and specific staff and treatments for life-threatening conditions with those for non-life-threatening conditions. Consequently, it is necessary to derive an appropriate way of incorporating both quality of life and life expectancy into a single measure to determine the relative costs and benefits of different treatments that may primarily provide improved quality of life and those that could provide an extended life expectancy.
One way of doing this is to use a metric that is the product of a measure of life quality with the expected years of life remaining. The benefit of a treatment is then quantified by how much this product (quality of life × life expectancy) is increased by the treatment. Consequently, an increase in both life expectancy and quality of life scores highest. Either an increase in quality of life for a reasonable life expectancy or an increased life expectancy with a reasonable quality of life would score moderately well. Treatments that provide an increased quality of life but cannot provide a good life expectancy would not score well; nor would treatments that provide a long life expectancy but with very poor quality of life.
An alternative method is to poll the public to determine how important certain aspects of quality of life are to people in our society. Their value can be compared to the value of extending life expectancy by asking the individuals polled how many years of life they might be willing to give up in order to have a specific increase in quality of life. For example, how many years of life would you be willing to give up in order to be able to live in a mostly independent manner at home rather than being hospitalized for the remainder of your life.
10. Briefly explain the difficulties involved with anchoring of metal alloy prostheses in bone and compare the advantages and disadvantages of using cements versus direct
osseointegration. (15 pts)
Metal alloys are very different in chemical structure to natural biological materials, so biological tissues such as bone do not easily adhere to metal alloy prostheses, and the body’s immune response tends to encapsulated the metal with fibrous tissue (slide 11 of Lecture #5).
Cements provide a quick and fairly reliable way to attach some metal alloy prostheses to bone (slides 35 & 46 of Student Presentation #6), but when setting, cements such as PMMA polymerize with an exothermic reaction that may kill surrounding bone cells (slide 11 of Lecture #5). In addition, cements are more brittle than bone and metal alloy implants, so they are liable to fracture (slide 19 of Lecture #9) allowing migration of the implant. Fractured or worn cement particles may also aggravate bone tissue and weaken it (slide 46 of Student Presentation #6).
Page 5 of 10
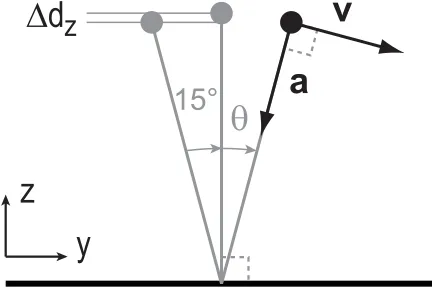
11.Consider the inverted-pendulum model of walking illustrated below.
1 m
15° 15°
ω
Assume the following:
i. The person has a mass of 70 kg, and the acceleration due to gravity is g=9.8 m s2 . ii. The person’s leg joints move such that their centre of mass (COM) moves in an arc with a
constant radius of 1 m around the pivot point in their ankle throughout the single-stance phase of walking, as depicted above.
iii. A single-foot stance phase begins at time t=0 with the COM at 15° from vertical (relative to the pivot point in the ankle) and ends with the COM at 15° past vertical at time
0.5 s
t= .
iv. The person is walking in such a way that their COM has a constant angular velocity 0 s
6
ω= ° for 0≤ ≤t 0.5s. Determine the following:
a. The change in gravitational potential energy ΔEgrav from the lowest point in the single-stance phase (i.e., at t=0) to the highest point (i.e., when the COM is directly above the pivot point in the ankle).
b. Expressions for the vertical ground reaction force Fgz
( )
t and horizontal ground reaction force Fgy( )
t that would be measured during the period 0≤ ≤t 0.5 s according to thismodel and the given assumptions. (15 pts)
θ
a
Δ
d
z
15°
v
z
y
a. The change in gravitational potential energy ΔEgrav is dependent on the change in vertical height Δdz of the COM according to:
grav z
E mg d
Δ = Δ .
As depicted in the figure above, at time t=0 the COM is at a height of:
(
0)
1cos(
15)
m 0.9659 m zd t = = − D = .
Therefore, the change in vertical height is Δ = −dz 1 0.9659 m=0.0341 m and the change in gravitational potential energy is:
grav 70 9.8 0.0341 23.37 J
E
Δ = ⋅ ⋅ = .
[image:31.612.196.412.63.207.2]b. One approach to determining the ground reaction force components is to first calculate the centripetal acceleration for motion with a constant angular velocity in an arc, as shown in the figure above. For an angular velocity ω=60° s at a radius of 1 m, the COM is moving with a linear velocity of magnitude:
60
1 m s 1.0472 m s 180
V = V = ⋅ ⋅π = .
Consequently, the centripetal acceleration is:
(
)
22
2 2
1.0472
m s 1.0966 m s 1
V a
r
= a = = = .
The vertical component of the acceleration az changes with the angle θ of the COM (with positive θ corresponding to clockwise rotation past vertical) according to:
( )
( )
21.0966 cos m s z
a θ = − θ .
Note that the negative sign is required in the front of this equation because the centripetal acceleration is downwards while the positive z direction is upwards.
Likewise the horizontal component ay varies according to:
Page 7 of 10
Note that the negative sign is required within the parentheses of the latter equation because the horizontal component of the centripetal acceleration is positive (i.e., forwards for the positive
y direction being forwards) for negative θ and negative (i.e., backwards) for positive θ.
In order to calculate the ground reaction force components, it is necessary to determine how θ changes as a function of time. For a constant angular velocity of ω =60° s, the angle changes with according to: t
( )
15 60 rad12 3
t t π π t
θ = − + D= − + ,
giving vertical and horizontal acceleration, respectively, of:
( )
21.0966 cos m s
12 3 z
a t = − ⎛⎜−π π+ t⎞⎟
⎝ ⎠ and
( )
2
1.0966 sin m s
12 3 y
a t = ⎛⎜π π− t⎞⎟
⎝ ⎠ .
Thus, the ground reaction forces components will be:
( )
( )
70 9.8 70 1.0966 cos N12 3
686 76.7636 cos N
12 3
gz z
F t mg ma t t
t π π π π ⎛ ⎞ = + = ⋅ − ⋅ ⎜− + ⎟ ⎝ ⎠ ⎛ ⎞ = − ⎜− + ⎟ ⎝ ⎠ and
( )
( )
70 1.0966 sin N12 3
76.7636 sin N.
12 3
gy y
F t ma t t
t π π π π ⎛ ⎞ = = ⋅ ⎜ − ⎟ ⎝ ⎠ ⎛ ⎞ = ⎜ − ⎟ ⎝ ⎠
An alternative approach to determine the vertical and horizontal components of the acceleration is first to calculate the vertical and horizontal components of the linear velocity . As shown in the figure on the previous page, the vertical velocity changes with the angle
V
θ of the COM according to:
( )
1.0472 sin( )
m s zv θ = −θ .
Note that the negative sign is required within the parentheses of this equation because the vertical component of the velocity is positive (i.e., upwards for the positive direction being upwards) for negative
z
θ and negative (i.e., downwards) for positive θ. Likewise, the horizontal velocity is:
( )
1.0472 cos( )
m s yv θ = θ .
Given the change in θ with t derived above, these velocities vary with time according to:
( )
1.0472sin m s12 3 z
v t = ⎛⎜π π− t⎞⎟
⎝ ⎠ and vy
( )
t 1.0472 cos 12 3t m sπ π
⎛ ⎞
= ⎜− + ⎟
⎝ ⎠ .
The vertical and horizontal components of the COM’s acceleration can be found by taking the derivates of the velocity equations with respect to time, which gives equations for a tz
( )
and that are identical to those found using the first method, and consequently identicalequations for the ground reaction force components.
( )
y
a t
A third method is to derive expressions for the vertical and horizontal displacement of the COM as a function of time, take derivates with respect to time to obtain the vertical and horizontal velocity and then take derivates again to obtain the vertical and horizontal acceleration.
0 0.2 0.4
−0.2 0 0.2
t
v z
(t) [m/s]
0 0.2 0.4
1.02 1.04
t
v y
(t) [m/s]
0 0.2 0.4
−1.1
−1.08
−1.06
t
a z
(t) [m/s
2 ]
0 0.2 0.4
−0.2 0 0.2
t
a y
(t) [m/s
2 ]
0 0.2 0.4 610
612
t
F gz
(t) [N]
0 0.2 0.4
−20 0 20
t
F gy
(t) [N]
Page 9 of 10
12.The total force FT produced by a muscle as a function of muscle length is the sum of two components, the activate force FA produced by myofibril contraction and the passive force
P
F produced by the stress-strain characteristics of the muscle.
Consider contraction of a particular muscle for which the activate force depends on the muscle length according to the relationship:
A F
(
)
20, for 0.5,
, for 0.5 1.5,
0, for 1.
20 80 1
5, A L L F L L < ⎧ ⎪ =⎨ − − ≤ ⎪ > ⎩ ≤
where has units of N and L is the muscle length relative to (i.e., divided by) its resting length.
A F
The muscle’s passive force FP depends on the muscle’s relative length according to the relationship:
(
)
340 0.75
0, for 0.75,
, for 0.75. P L L F L < − ⎧⎪ = ⎨ ≥ ⎪⎩
where FP has units of N.
a. At what relative length L within the muscle’s normal operating range of 0.5 1.2 is the total force FT = +FP maximal?
L
≤ ≤
A F
b. What is the maximal total force (i.e., the total force at the relative length L found in part
a. above)? (15 pts)
a. The total force within the muscle’s normal operating range of 0.5≤ ≤L 1.2 is:
(
)
(
)
(
)
2
2 3
, for 0.5 0.75,
20 80 1
20 80 1 40 0. 57 , for 0.75 1.2. T L L L L F L − − − −
⎧ ≤ <
⎪ = ⎨
+ − ≤
⎪⎩ ≤
The force within the range 0.75≤ ≤L 1.2
)
2 3
0.75 L
must be greater than the force within the range , so it is only necessary to determine the maximum of the equation
for 0.5≤ <L 0.75
(
)
20 80− L−1 +40
(
L−0.75 ≤ ≤1.2.Taking the derivative of this expression gives:
(
)
(
)
(
)
2 2 2 2 dfor 0.75 1.
160 1 120 0.75
160 160 120 2 0.75 0.75
120 2 d 340 227.5, T L L L L L F L L L L = + ≤ = + − − − − + − + − ⋅ + = ≤
and equating this quadratic equation to zero gives solutions of:
2
2
d
340 227.5 0 for 0.75 1.2 d
13 7 or . 12 120
340 340 4 120 227.
2 12 4
5 0
T
F
L L
L
L
L
= − + = ≤ ≤
⇒ ± − ⋅ ⋅ =
⋅ =
The first solution corresponds to a local maximum at L≈1.0833, which is within the normal operating range. The second solution corresponds to a local minimum at , which is outside the range of values of L for which this expression is valid—the actual local minimum is at , as shown on the plot below. Therefore the total force is maximal when the muscle is 13/12 times its resting length.
1.75
L=
1.5
L=
b. The total force at L=13 12 is:
2 3
13 13
20 80 1 40 0.75
12 12 20.93 N.
T
F − ⎛⎜ − ⎞⎟ ⎛⎜ − ⎞⎟
⎝ ⎠ ⎝ ⎠ =
= +
Note that the maximum active force in 20 N, so the passive stress-strain characteristics of the muscle have added another 0.93 N to the maximum total force and shifted the length at which the maximum is achieved by one-twelfth of the resting length.
0 0.5 1 1.5 2
0 5 10 15 20 25 30 35 40
L
Force (N)
FA FP FT
Page 1 of 8
Electrical Engineering 3BA3: Structure of Biological Materials
Solutions to Midterm Quiz #1 (2010)
1. A major disadvantage of using solid titanium in skeletal prostheses is that: a. it is heavier than stainless steel and cobalt chromium,
b. it has a higher elastic modulus than stainless steel and cobalt chromium, c. it has very poor biocompatibility, or
d. it has a higher elastic modulus than bone. (5 pts)
The answer is d. it has a higher elastic modulus than bone. See slide 10 and Tables 8.1 & 8.4 on slide 22 of Lecture #4, as well as slides 17–20 of Student Presentation #5.
2. The stress-strain behaviour of a large bone such as the femur can be described as: a. isotropic,
b. crystalline, c. rubbery, or
d. homogeneous. (5 pts)
The answer is b. crystalline. See slides 8 & 9 of Lecture #3. Note that bone is anisotropic (has different elasticity in different directions) and inhomogeneous (has different elasticity in different parts of the bone), as discussed in Lecture #3.
3. The second stage of wound repair is : a. inflammation,
b. remodelling, c. proliferation, or
d. coagulation/haemostasis. (5 pts)
The answer is a. inflammation. See slide 4 of Lecture #5.
4. Nervous tissue consists mostly of: a. neurons,
b. adipocytes, c. glial cells, or
d. tenocytes. (5 pts)
The answer is c. glial cells. See slide 27 of Lecture #3.
5. The horizontal component of the ground reaction force during a single-foot stance while walking on a level surface is due to:
a. friction, b. air drag, c. gravity, or
d. none of the above. (5 pts)
The answer is a. friction. See slide 4 of Lecture #6.
6. Synthetic (mechanical) heart valves are typically preferable over bioprosthetic for replacement of heart valves in:
a. young patients, b. elderly patients,
c. patients who cannot take blood thinning medications, or
d. cases where perivalvular regurgitation would be very problematic. (5 pts) The answer is a. young patients. See Student Presentation #3.
7. Fast twitch muscle fibers:
a. utilize predominately oxidative metabolism, b. fatigue more rapidly than do slow twitch fibers,
c. generate a larger maximal force per cross-sectional area of muscle tissue than do slow twitch fibers, or
d. have a lower maximum contraction velocity than that of slow twitch fibers. (5 pts) The answer is b. fatigue more rapidly than do slow twitch fibers. See slides 8–12 of Lecture #7.
8. Lack of rigidity in the bond between a skeletal prosthesis and the bone in which it is implanted can lead to:
a. damage to the bone,
b. gradual loosening of the prosthesis,
c. high local stress concentrations in the prosthesis, or
d. any or all of the above. (5 pts)
Page 3 of 8
9. Compare and contrast the bioethical issues involved with preliminary testing of a new biomedical device in animals to the bioethical issues with clinical trials of that device in
humans. (15 pts)
In both cases, the Hippocratic principals of beneficence and nonmaleficence should guide the ways in which the studies are designed and conducted. The purpose of the experiments/testing should be to bring about good for potential users of the biomedical device and to do the least harm possible to any animal or human subject. There are regulations for the humane use of both animal and human subjects in research, and institutions conducting research with animal or human subjects must have corresponding ethics review boards that must approve any planned experiments and oversee how those experiments are conducted.
The major difference for the human and animal subjects is that the humans must willingly participate in the study by giving informed consent, whereas the animals are involuntary participants. Likewise, any human subject has the right to withdraw from a study if they so desire, but animals do not have this ability. Consequently, ethics review boards for animal studies are typically more stringent in ensuring that the experiments/testing is designed in a way to reduce pain and suffering, because for human studies informed consent is a primary means of protecting the subjects’ rights. Thus, ethics boards for human studies largely concentrate on ensuring that subjects are fully informed and that they are not being coerced in any way. In addition, what is considered ethical treatment of humans and animals differs in most societies, although animal welfare groups are arguing for greater equality for animals. Furthermore, in most cases the results of the studies will not benefit animals (unless there is some development in veterinary medicine as a by-product), whereas humans will benefit from the outcomes of both the animal and the human studies.
10. Briefly explain the obstacles to restoring natural locomotion in a paraplegic patient by means of functional electrical stimulation (FES). (15 pts) The main obstacles to restoring natural locomotion (walking and running) in a paraplegic patient (i.e., someone whose legs are paralyzed, typically because of a spinal cord injury) include:
– The number of electrodes that would be required to stimulate all the muscles that are involved with walking.
– The complexity and size (and hence portability) of the electronics and power supply required for stimulating so many muscles.
– The specificity of the FES to excite only the required muscles to the correct degree.
– Designing the patterns of electrical stimulation to be delivered on all the electrodes to give the desired patterns of muscle contractions for such a complicated movement as walking.
– Exciting the muscles in a way that they do not fatigue too quickly under the repetitive stimulation that would be needed for walking.
– Developing a way that the patient can intentionally trigger or control the electrical stimulation to give the desired movement.
– Muscle atrophy in the legs giving rise to a reduction in the achievable strength for leg movements.