Efficient model-based leak detection in boiler steam-water systems
Xi Sun, Tongwen Chen
*, Horacio J. Marquez
Department of Electrical and Computer Engineering, University of Alberta, Edmonton, Alta., Canada T6G 2V4
Received 26 November 2001; received in revised form 6 May 2002; accepted 5 July 2002
Abstract
A model-based least-squares algorithm with a time-varying forgetting factor is developed for leak detection in boiler steam-water systems. The algorithm has been tested using real industrial data from Syncrude Canada, and has proven to be effective in detection of boiler tube or steam leaks; proper implementation of the algorithm would lead to early leak warning, which is important in maintaining safe operation of the plant.
# 2002 Elsevier Science Ltd. All rights reserved.
Keywords: Leak detection; Boiler systems; Fault diagnosis; Process monitoring
1. Introduction
Boilers are important components in power, chemical and oil refinery industries; they transform water into steam for power generation or other industrial applica-tions. A common boiler fault is the tube leak in the riser and downcomer sections due to aging and thermal stress. Early detection of such faults in operation are important: It helps in reducing possible damage to equipments and productivity loss caused by (otherwise) unscheduled boiler shut-down; it also ensures safety for operators.
Boiler tube leaks are a special type of faults in process systems, which belong to the class of gross error problems. Most methods for gross error estimation use statistical analysis and system identification methods (Kao, Thamhane & Mah, 1992; Chemielewaki, Manou-siouthakia, Tilton & Felix, 2000; Crowe, 1988). For example, Narasimhan and Mah (1987) derived a gen-eralized likelihood ratio method for identifying gross errors in steady state chemical processes;Chemielewaki et al. proposed a method for tank leak and instrument bias detection, in which a Kalman filter was used in the detection scheme.
However, since boilers are complex systems involving
various disturbances, nonlinearities, and time-varying characteristics in the transient responses, the above steady-state based methods would not provide satisfac-tory performance in our leak detection problems. In this research, an effective model-based leak detection scheme is presented, taking into account boiler dynamics; the algorithm is based on least squares estimation with a time-varying forgetting factor. Application of the pro-posed scheme to industrial case studies shows adv an-tages of the method.
Briefly, the paper is organized as follows. Section 2
briefly introduces an analog boiler model. Section 3
presents the proposed leak detection algorithm, together with some discussion of the implementation issues.
Section 4collects results in three case studies involving Syncrude industrial boilers. Finally, Section 5 offers some concluding remarks.
2. Boiler model
Assume in a typical boiler system that the mass flow in the downcomers is the same as that in the riser section, that is, the flow rate is uniform throughout a complete circulation path; then an overall material balance relationship for the steam drum can be written as
* Corresponding author. Tel.:/1-780-492-3940; fax: /1-780-492-1811
E-mail address: [email protected](T. Chen).
www.elsevier.com/locate/compchemeng
0098-1354/02/$ - see front matter#2002 Elsevier Science Ltd. All rights reserved. PII: S 0 0 9 8 - 1 3 5 4 ( 0 2 ) 0 0 1 4 7 - 3
S(t)F(t)A0A1 dD(t) dt A2 dP(t) dt f(t)v(t) 0: (1)
where S(t) is the steam flow, F(t) the feedwater flow,
D(t) the drum liquid hight,P(t) the drum pressure,f(t) the boiler blow-down flow (which is not measured), and
v(t)the measurement noise; the parameters involved are
A0(drum section area), A1rlrv with rl the liquid
density andrvthe steam density, A2/Vlb2/Vva2with
Vlthevolume of saturated liquid in the drum andVvthe volume of steam in the steam drum and superheaters; moreover, rva1a2P(t)and rlb1b2P(t);anda1,
a2,b1andb2are constants obtained by correlating data
based on physical properties (Rink, White & Chiu, 1996).
3. Leak detection algorithm
Eq. (1) describes the dynamic relationship of the processvariables in the normal (leak-free) situation. If all parameters inEq. (1)are known, using the model we can predict the feedwater flow based on measurement of the other variables; comparing the predicted feedwater flow with the actual measurement generates the residual signal, which normally is quite noisy. We propose to process the residual signal by a least squares algorithm with a time-varying forgetting factor, the result from which is then used to monitor and detect boiler leaks.
In practice, the dynamic relationship inEq. (1)should be discretized for a given sampling frequency:
X4 i1
Bi(q1)X
1(k)z(k)0: (2)
Here, X1(k), X2(k), X3(k), and X4(k)*/k is the
discrete time, integer-valued*/are the discretized
feed-water flow, steam flow, drum liquid hight, drum pressure, respectively;z(k) is the noise term which also includes unmeasured disturbances such as the boiler blow-down flow; and Bi(q1), i/1,. . ., 4, are
poly-nomials inq1, the unit time delay operator. Note that the discrete-time model inEq. (2) is more general than
the discretized model obtained from the steam drum in
Eq. (1)*/it also includes dynamics of the superheaters.
Based on measured fault-free data, the parameters in
Eq. (2) can be estimated using a standard system identification technique (Ljun, 1999). Then the model can be employed for fault detection: we estimate the (fault-free) feedwater flow, ˆX1(k);from the model using
measurementsX2,X3,X4, and then compute the residual
signal e(k)X1(k)Xˆ1(k): In the ideal case (perfect modeling and fault-free), e(k) consists of measurement noises only, which can be assumed to be zero mean. However, in reality, many temporary or time-varying disturbances exist. In order to reduce the effect of these temporary disturbances, we introduce a time-varying forgetting factor in a least squares algorithm, thereby enhancing accuracy of the leak detection. Let u be the leak estimation; the following recursive estimation scheme is proposed for boiler leak detection:
ˆ u(k)uˆ(k1)P(k)fe(k)uˆ(k1)g; (3) P(k) 1 m(k) 1 P(k1) m(k)P(k1) P(k1); (4) m(k)1e(k) 2 Q2 ; (5)
where m(k) is the time-varying forgetting factor which satisfies the limit condition 0B/mmin0/m(k)0/1, and Q
is a nonzero constant which is chosen so that m(k) is within the limit range. Normally, the larger the dis-turbances are, the smaller the forgetting factors should be chosen to reduce the effect of the disturbances on the leak estimation.
In practice, because of disturbances, unmodeled dynamics and/or measurement biases, the residuale(k) may not be zero mean statistically and may change with time. This will in turn result in that ˆu(k)has a nonzero mean andvaries with time. In order to detect faults and minimize false alarms, nonzero alarm thresholds should be set up for ˆu(k): The selection of suitable alarm thresholds is important: small thresholds will enhance sensitivity of the leak detection, but false alarms will also increase; on the other hand, large thresholds will result in missing some leaks. In this work, the thresholds are
settled on the basis of the fault-free u using real, industrial data.
4. Industrial case studies
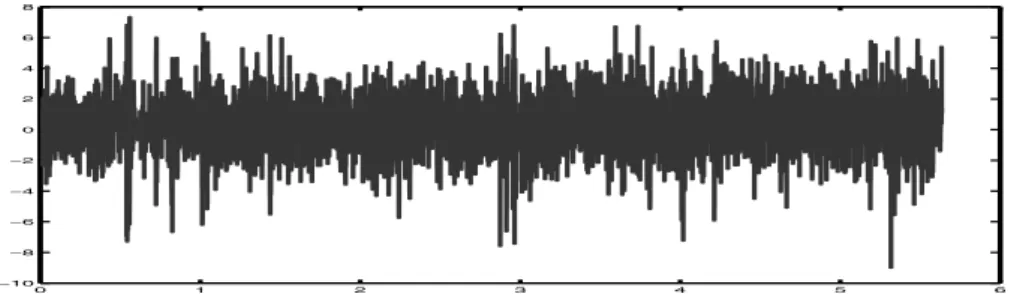
Boiler tube leaks or steam leaks will affect the material balance relationship, and thus change the properties of the residual. However, it is difficult to detect a leak without applying the model-based algo-rithm discussed in the preceding section: take utility boiler A from Syncrude Canada for example; Fig. 1
shows the material balance error for a leak-free period, and Fig. 2for a period when a tube leak took place*/
because of noisy measurement and disturbances, it is hard to detect the leak. This serves as a motivation for adopting our model-based least squares algorithm for leak detection.
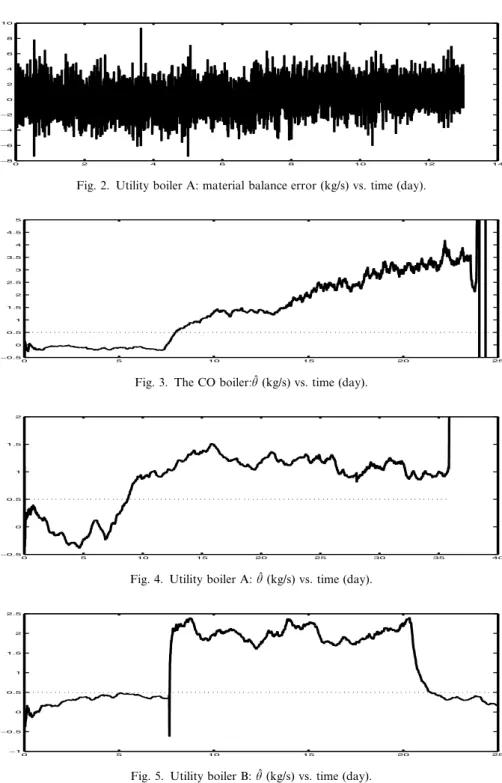
On applying the algorithm proposed in Section 3 to three industrial cases, the CO boiler, utility boilers A and B, with Syncrude Canada’s utility plant at Fort McMurray, Alberta, we first identified the model parameters using the real leak-free data supplied by Syncrude*/the results are contained in Appendix A; Fig. 2. Utility boiler A: material balance error (kg/s)vs. time (day).
Fig. 3. The CO boiler:/uˆ(kg/s)vs. time (day).
Fig. 4. Utility boiler A: ˆu(kg/s)vs. time (day).
then we selected appropriate alarm thresholds based on the normal operating conditions of the boilers by analyzing fault-free data of about half a year*/the
results are also given inAppendix A.
There were two boiler tube leaks and one boiler steam leak in Syncrude Canada’s utility plant in 2001. Based on the historical data, we applied the proposed algo-rithm in order to detect the leaks and provide early warnings. The detection results are reported below.
Fig. 3 shows the leak detection result for the CO boiler, where the dotted line indicates the threshold for leak warning. From this plot, we would have detected the leak at about the 7th day or about 1 day later since the leak happened, and the leak amount had gradually increased to 3 kg/s. We notice that the operators found the leak at about 23rd day and began to shut down the boiler. Thus, should our algorithm have been imple-mented, it would have provided a leak warning of about 16 days earlier than when the operators discovered the leak.
Fig. 4shows the result for utility boiler A. It is clear that a leak was detected at about the 9th day, and the leak amount was about 0.5/1.0 kg/s. Note that the
operators found the leak about 27 days later!
For utility boiler B inFig. 5uˆwas closed to 0.5 kg/s, the threshold value, between the 3rd and 7th days because the operators increased the blow-down flow in this period. At about the 7.5th day in the plot, the curve suddenly went up to 1.7/2.3 kg/s, which implied that the leak rate was 1.2/1.8 kg/s. This (steam) leak lasted for
about 13 days before it was discovered by the operators.
5. Conclusions
In this work, we provided an effective and efficient solution to a leak detection problem involving industrial boilers. The solution was a model-based least squares algorithm with a time-varying forgetting factor. The algorithm has been tested using industrial data from Syncrude Canada, all resulting in accurate and early detection of boiler leaks. Thus we conclude that implementation of the proposed algorithm would lead to significant improvement in safety and maintenance of industrial boilers.
Acknowledgements
The authors wish to thank Kent Gooden and Muhammad Riaz from Syncrude Canada’s utility plant in Fort McMurray, Alberta, and Dr Ray Rink for their helpful discussions. This research was supported by Syncrude Canada and NSERC (Natural Sciences and Engineering Research Council of Canada).
Appendix A
Boiler model parameters in the form ofEq. (2)for the three Syncrude cases
B1(q 1 ) B2(q 1 ) B3(q 1 ) B4(q 1 ) CO boiler 1.0/1.24q1/0.60q2/0.25q3 0.55q1/0.42q2 /4.33q1 /0.17q1 Utility boiler A 1.0/1.05q1/0.15q2/0.03q3 /0.51q1/0.63q2 /0.99q1 0.33q1 Utility boiler B 1.0/1.20q1/0.31q2/0.03q3 /0.07q1/0.15q2 /2.21q1 0.26q1
Threshold andQ values in the algorithm for the three cases:
CO boiler Utility boiler A Utility boiler B
Upper threshold (kg/s) 0.5 0.5 0.5
Lower threshold (kg/s) /0.5 /0.5 /1.0
References
Chemielewaki, D. J., Manousiouthakis, V., Tilton, B. & Felix, B. (2000). Gross error detection in serially correlated process data. Industrisl and Engineering Chemical Research 39, 2336/2344. Crowe, C. M. (1988). Recursive identification of gross errors in linear
data reconciliation.AIChE Journal 34, 541/549.
Kao, C., Thamhane, A. C. & Mah, R. S. H. (1992). Gross error detection in serially correlated process data. 2. Dynamic systems. Industrisl and Engineering Chemical Research 31, 254.
Ljung, L. (1999).System identification*/theory for the user(2nd ed.. Prentice-Hall.
Narasimhan, S. & Mah, R. S. H. (1987). Generalized likelihood ratio method for gross error identification.AIChE Journal 33, 1514/ 1521.
Rink, R., White, D., Chiu, A. (1996). SYNSIM: a computer simulation model for the mildred lake steam/electrical system of Syncrude. Technical Report. Department of Electrical Engineering, Univer-sity of Alberta.