N A S A T E C H N I C A L NASA TM X-72646
M E M O R A N D U M
IS*
DESCRIPTION AND EVALUATION OF THE VIKING LANDER CAMERA PERFORMANCE PREDICTION PROGRAM
By Friedrich 0. Buck, Edward J. Taylor, Daniel J. Jobson, and Carroll W. Rowland
January 1975
This informal documentation medium is used to provide accel erated or special release of technical information to selected users. The contents may not meet NASA formal editing and publication standards, may be re-vised, or may be incorporated in another publication.
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION LANGLEY RESEARCH CENTER,. HAMPTON, VIRGINIA 23665
1. Report No. TM X-72646
2. Government Accession No. 3. Recipient's Catalog No.
4. Title and Subtitle
DESCRIPTION AND EVALUATION OF THE VIKING LANDER CAMERA PERFORMANCE PREDICTION PROGRAM
5. Report Date
January 1975
6. Performing Organization Code
T. Author(s)
Friedrich 0. Huck, Edward J. Taylor, Daniel J0 Jobson, and Carroll W. Rowland
8. Performing Organization Report No.
10. Work Unit No. 9. Performing Organization Name and Address
NASA Langley Research Center Hampton, Virginia 23665
11. Contract or Grant No.
'2. Sponson no Agency Name and Address .
National Aeronautics and Space Administration Washington, D.C. 20546
13. Type of Report and Period Covered Technical Memorandum 14. Sponsoring Agency Code
j 15. Supplementary Notes
j 16. Abstract
A computer program is described for predicting the performance of the
i
| Viking lander cameras. The predictions are primarily concerned with two i objectives: (1) the picture quality of a reference test chart (of which i there are three on each lander) to aid in diagnosing camera performance; and i (2) the picture quality of cones with surface properties of a natural
i terrain to aid in predicting favorable illumination and viewing, geometries
I i
j and operational camera commands„ Predictions made with this piogram are I verified by experimental data obtained with a Viking-like laboratory
I
facsimile camera„
1 7. Key Words (Suggested by Author(s) ) (STAR category underlined)
Image quality
Viking lander camera 14
19. Security Ctassif. (of this report)
18. Distribution Statement
Unclassified - Unlimited
DESCRIPTION AND EVALUATION OF THE VIKING LANDER CAMERA
PERFORMANCE PREDICTION PROGRAM
By Friedrich 0. Huck, Edward J. Taylor Daniel J. Jobson, and Carroll W. Rowland
SUMMARY ;
A computer program is described for predicting the performance of the
Viking lander cameras. The predictions are primarily concerned with two
objectives: (1) the picture quality of a reference test chart (of which
there are three on each lander) to aid in diagnosing camera performance; and
(2) the picture quality of cones with surface properties of a natural terrain
to aid in predicting favorable illumination and viewing geometries and
operational camera commands. Predictions made with this program are verified
by experimental data obtained with a Viking-like laboratory facsimile camera.
INTRODUCTION
Two Viking spacecraft scheduled to land on Mars in 1976 will each use
two facsimile cameras to spatially, radiometrically, and spectrally
characterize the surface. The cameras feature a photosensor array with 12
silicon diodes to provide a variety of imaging modes, including six spectral
bands for color and near-infrared imaging with an angular resolution of 0.12°,
and 4 focus steps for monospectral imaging with an improved angular
resolution of 0.04°. The field of view in elevation ranges from 40° above to
60° below the horizon, and in azimuth is selectable in 2.5° steps up to 342.5°.
encoding by use of 6 linear gains and 32 offsets. The camera scanning rates
are synchronized to the lander data transmission rates of 16,000 bits per
second to two orbiters as relay stations and 250 bits per second directly
to Earth.
The versatility of these cameras demands a carefully designed imaging
strategy to optimize their use. The strategy for the first few pictures must
be based on pre-flight predictions of image quality as a function of
anticipated Mars surface properties and illumination and viewing geometry as
well as on camera characteristics. Thereafter, the strategy can be determined
with the help of the initial pictures.
If the quality of the initial pictures received from Mars concurs
generally with pre-flight predictions, then the basic pre-flight imaging
strategy may be essentially continued for the subsequent investigations. If,
however, the quality of the pictures is degraded either because the cameras are
not performing properly or because the actual Mars optical environment departs
significantly from anticipated characteristics, or because both situations
occur, then the pre-flight imaging strategy may be of little further use. A
flexible camera performance prediction computer program can aid first as a
diagnostic tool in isolating the cause of picture degradation, and thereafter
as a predictive tool in revising the imaging strategy. This diagnostic and
predictive function can be accomplished in the following way.: If the pictures
obtained from viewing one of the reference test charts on the lander agrees
with predictions, then the unexpectedly poor pictures of the scene must have
been caused by differences between the actual and the anticipated Mars
environment. However, if the pictures of the reference test chart do not
least in part, by a degradation in camera performance. (But this latter
situation would not preclude a significant difference between the anticipated
and encountered environment). Whatever the inspection of the initial pictures
and the camera engineering data may reveal, the resultant conjectures about
degraded camera performance and unanticipated scene characteristics can be
entered into the computer by altering pertinent camera and scene parameters
until computational results come into agreement with the initial picture data.
Thereafter, the computer program can again be used to predict favorable
illumination and viewing geometry and camera control settings.
Suitable definitions and mathematical formulations of image quality
criteria were derived in reference 1. This paper describes the camera
. performance program that has been developed from these criteria, and presents
comparisons between predictions and experimental results obtained under i
'.controlled laboratory conditions. The experimental measurements were made
with a laboratory facsimile camera that is similar in performance to the
Viking lander cameras.
SYMBOLS
b normalized diameter of approximated circular area of a cone section, pixels
c normalized diameter of cone base, pixels
D diameter, meters
E electronic frequency response
f lens focal length, meters
g phase angle (see figure 6), degrees
I current, amperes
I
Isignal current normalized to 4>(e, ^» g)
=1> amperes
i integer
J
1first order Bessel function
k spatial frequency, line pairs per meter
k camera calibration factor
c
k camera optics factor
k conversion factor between time and spatial frequencies
K wi'dth of line pair of reference test chart tribars, meters
L distance from camera lens in object space, meters
L(u, s) lens spatial frequency response
& distance from camera lens in image space, meters
N number of pixels in a cone section
2
N, spectral radiance, watts/meter -micrometer-steradian
/\N unit vector normal to surface
n number of overlapping line scans
P(v s) spatial frequency response of circular photosensor aperture
3.
P, spectral radiant power, watts/micrometer
AQ . quantitization level
r reflectance
R
fpreamplifier feedback resistance, ohm
R, photosensor responsivity, amperes/watt
2
S, solar irradiance above Martian atmosphere, watts/meter -micrometer
S/N ratio of average signal to root-mean-square noise
u dimensionless variable for defocus
v dimensionless variable for radius
V voltage, volts
V signal voltage normalized to t))(e, \, g) = 1, volts
Z cone geometry factor
a target slope, degrees or radians
3 instantaneous field of view or angular resolution, degrees or
radians |
6 . azimuth cone angle increment, degrees--©* radians<
£ angle between emitted radiation and normal to surface (see
figure 6), degrees or radians
c; azimuth angle between object slope and incident radiation
(see figure 6), degrees or radians
9 azimuth angle between incident and emitted radiation (see
figure 6), degrees or radians
l angle between incident radiation and normal to surface (see
figure 6), degrees or radians
K number of pixels per line-pair width of tribars
X wavelength, micrometer
A wavelength integral
p, spectral reflectivity of surface (normal albedo)
T, (i ) spectral transmissivity of atmosphere
T, optical throughput
v frequency, Hertz
<j> illumination scattering function
\l> azimuth angle between object slope and emitted radiation
(see figure 6), degrees or radians
Subscripts: a photosensor aperture c camera e electronics i integer £ lens m mirror n noise o flat surface q quantization w window
+ brighter than flat surface
darker than flat surface
The symbol A in front of a parameter indicates a peak or peak-to-peak
variation of that parameter. The bracket < > around a parameter indicates
a criterion which is to be estimated.
IMAGE QUALITY CRITERIA AND PREDICTION PROGRAM
Image quality criteria that have been formulated in refarence 1 are
briefly reviewed, and the computer program that is based on these criteria
is described. It should be pointed out in order to avoid possible confusion
that some details of the formulations obtained from reference 1 have been
changed, and that formulations pertaining to the reference test chart have
Image Quality Criteria
The Viking lander camera has four imaging modes: survey, high-resolution,
color, and near infrared (IR). In the broad-band survey and high-resolution
imaging modes, it is generally desirable to record small spatial details and
slope variations. In the narrow-band color and IR imaging modes, it is
generally desirable to record spectral variations. In addition, it is
generally also desirable in all four imaging modes ,to encompass, but not
exceed, the complete range of radiance variations in the scene with a single
dynamic gain setting. Imagery of the reference test charts on each lander
provides data for checking and calibrating the performance of the camera.
Broad-band imagery. - The capability to resolve small spatial details
and slopes has been defined as the minimum detectable cone diameter and cone
slope with respect to a level surface. A right-circular cone with surface
properties of the surrounding terrain seems intuitively representative of
many features and has no preferred surface orientation azimuthally about its
axis. If the cone angle is chosen to be steep, a condition yielding high
surface contrast, then the detectability of this target becomes primarily a
measure of the camera capability to resolve small detail. I:: the cone angle
is chosen to be shallow, a condition yielding low surface contrast, then the
detectability of the same target becomes primarily a measure of the camera
capability to resolve small slopes.
The cone is probably also the simplest shape for this application. But
it would, nevertheless, be unnecessarily complex to translate rigorously
cone-surface-radiance variations into image grey-scale variations in order
to estimate the detectability of a cone. Instead, the average radiance is
a level surface background, and those regions, including a shadow (if
present), which are darker than the background. The two average reflectance
values and their corresponding areas are then used as approximate target
characteristics in order to formulate an expression for the
average-signal-to-rms-noise ratio of the cone image.
Narrow-band imagery. - The capability to resolve spectral variations
has been defined as the minimum detectable albedo variation. This minimum
detectable variation is taken to be that difference in albedo which results
in an average-signal-to-rms-noise ratio of 3, a level surface being assumed.
Dynamic range. - Knowledge of the statistical distribution (histogram)
of surface radiance would allow the selection of optimum camera dynamic
range setting (that is, gains and offsets as illustrated in Appendix A) for
the complete or a desired part of the radiance range. But the actual radiance
distribution will, of course, not be known until after data have been
received from the lander. It has, therefore, been proposed i:hat a minimum,
mean, and maximum value of the'radiance distribution be estimated, the albedo
and illumination scattering function of the scene being assumed to be uniform
over the landing site. Clearly, the minimum surface radianc2 occurs in
shadows. Since atmospheric scattering on Mars is small (excepting, of
course, during a dust storm) within the spectral range of the camera silicon
photosensors, shadows will exhibit negligible radiance. Hen;e, for the
purpose of selecting a camera offset, minimum radiance may b; defined as zero.
The mean radiance is defined as the radiance of a level surface for a given
viewing geometry. The maximum radiance is defined as the radiance of a
Reference test chart imagery. - The reference test chart (see
Appendix C) provides 11 grey scales to calibrate the radiometric response and
3 sets of tribars to check the frequency response of the camera; in addition,
it provides three color patches to aid the construction of color images.
Camera Performance Prediction Program
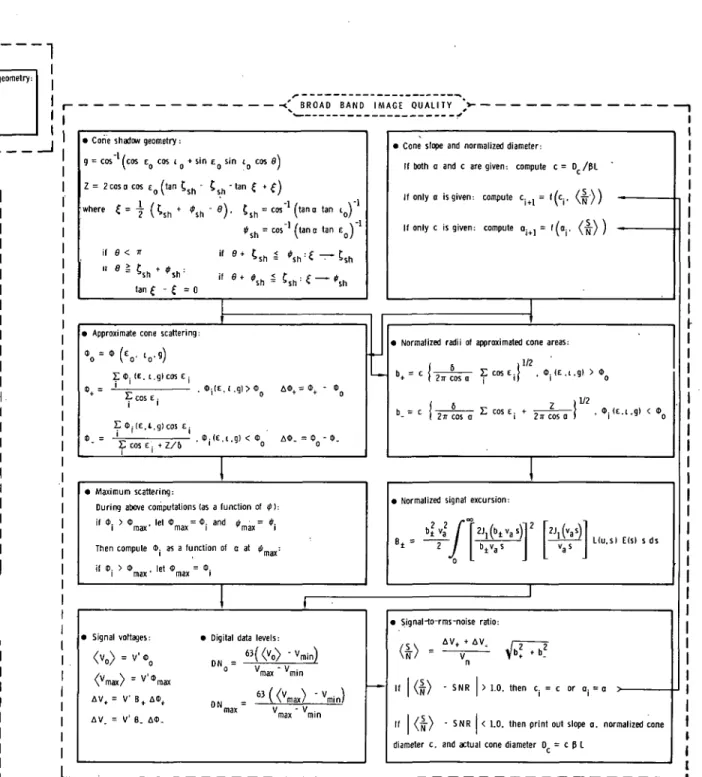
Figure 1 presents a block diagram of the .camera performance prediction
program with all pertinent equations. The program is divided into three
basic parts: input data, interface relations, and camera performance or
image quality computations. The latter, in turn, can be divided into three
sections: image quality of the reference test chart, and narrow-band and
broad-band image quality of the scene.
Input data. - The input data consists of camera characteristics, spatial
and reflectance data of the reference test chart, optical data of the
environment, and illumination and viewing geometry. All of this data must
be readily interchangeable during mission operations. But since the process
of modification is primarily a computer interface function, it: is not
further discussed here. The input data used in this paper to evaluate image
quality computations are given in appendices as follows:
1. Appendix A presents a description of the laboratory J'acsimile
camera that is used in the experiments. The performance characteristics of
this camera are similar to those of the Viking lander cameras
2. Appendix B presents the irradiance characteristics of the National
Bureau of Standard (NBS) lamp and the floodlight used as light sources for
the experiments.
of the Viking reference test chart.
4. Appendix D presents pertinent characteristics of the surface
material used for the broad-band image quality experiments, and the
Meador-Weaver illumination scattering function (ref. 2) that describes the diffuse
reflectance of this material as a function of its physical properties such
as particle size, single-particle albedo, and compactness.
Interface relationships. - The interface relationships primarily
trans-late the input data and camera commands into quantities and units used by
the image quality computations.
The more important computations are:
1. Most wavelength-dependent integrations, including in particular
those integrations that are required to determine the surface radiance and
camera response weighted average wavelength, A, the photosensor signal
current, I', and preamplifier output voltage, V, normalized to <J>(e, l> g) =
2. Normalized camera parameters for the photosensor aperture radius,
v , and defocus, u. a
3. The conversion factor k between the time frequency, V, of
electrical filters and spatial frequency, s, of optical filters.
4. The camera selectable dynamic range, which extends from V . to mm
V , as determined by the offset and gain commands. (The factor 0.216 is a IH3.X
constant negative offset in the video electronics).
5. The total camera rms noise, V , which consists of the photosensor
array electronic noise, V , and the quantization noise, V . The effective
electronic noise bandwidth BW is reduced by the factor n if a line is
6. The overall electronic frequency response, E(v), is the product of
the frequency response of the photosensor preamplifier, E.(v) , the analog
video electronics, E (v), and the running mean integrator used for
analog-to-digital conversion; the integration time is t /2, and t is the time between
s s
samples.
Image quality; reference test chart. - The spectral radiance, W, A,r, of the reference test chart and the spectral power falling on the photosensor
are computed, assuming the illumination scattering function of the target
to be Lambertian and the viewing angle normal. The results lead directly to
the computation of the photosensor signal current, preamplifier output
voltage, and digital data'level. Computations for the tribar peak-to-peak
signal account also for the frequency response of the lens, pinhole, video
electronics, and sampling process. The frequency response computation
includes the first three terms of the square-wave amplitude response as a
function of the camera sine-wave frequency response. The sampling process
generates a signal which is statistical rather than deterministic in nature.
The factor -. accounts for an average reduction in signal contrast; the
actual signal may have a slightly higher or lower contrast.
Image quality: broad-band. - A cone with a normalized base diameter c
(i.e., the actual diameter divided by the pixel diameter) and slope a has
been selected to represent small spatial details or slopes. The program will
compute either one of three alternatives: (1) If both a and c are given,
the program will compute the resultant signal-to-noise ratio. (2) If only
a is given, it will compute the minimum detectable cone diameter, that is,
that value of c which results in a signal-to-noise ratio of SNR; SNR is an
compute the minimum detectable cone slope. Several computational iterations
are required for the last two alternatives.
The first step is to compute the average value of the illumination
scattering function over those regions of the cone which are brighter than a
level surface background (<J>,) , and those regions, including a shadow (if
present) , which are darker than the background (<j>_) . Several lighting and
viewing geometries must be carefully accounted for when computing the cone
geometry factor Z, as explained in detail in reference 1. The second step
is to compute the areas of the brighter and darker than background cone
surface; these areas are then assumed to be circular with a normalized
signal excursion of these two circular areas, B+ and B_, in order to account
for the camera frequency response (including defocus blur).
Together with the previously computed normalized signal voltage V,
these results lead directly to the signal excursion AV and signal-to-noise
ratio S/N. If both a or c are given, then this signal-to-noise ratio is
printed out. If either a or c are given, then a test is performed to
determine if the signal-to-noise ratio is approximately equal to SNR. If
not, then a value of a or c is estimated and all computations are repeated.
Reiterations are performed until the value of a or c results in a
signal-to-noise ratio approximately equal to SNR.
Image quality: narrow-band. - The noise-equivalent radiance and the
minimum detectable albedo difference are directly computed from previously
COMPARISON OF COMPUTER PREDICTIONS AND
EXPERIMENTAL MEASUREMENTS
Two parts of the image quality prediction program need to be confirmed
by experimental measurements; namely, the formulations that are concerned
with the reference test chart and the cone targets. All other formulations
contained in the program are either conventional or very simple, and the
computer program of the formulations has been?checked by independent
computations.
It is of considerable interest to determine the agreement that can be
obtained between predictions and experimental results under carefully
controlled laboratory conditions. This agreement depends, of course, not
only on the accuracy of the formulations but also on the accuracy with which
camera and target characteristics are known. This limitation includes, in
particular, the illumination scattering function of the basalt: material used
for the cone targets (see Appendix D).
Reference Test Chart Images
Predictions are compared to experimental results for four reference
test chart pictures. The facsimile camera was located 1.0 m ilrom the chart
and viewed it normally (e = 0°). A NBS lamp (EPI 1577) was located 60 cm
from the chart and illuminated it at an angle of 20° from normal (i = 20°).
Three of these images are shown in figure 2: the first image was obtained
in the so-called Hi-Res 1 mode, which has an instantaneous field of view of
0.044° and in-focus distance of 1.9 m; the second image was obtained in the
Hi-Res 2 mode, which has the same instantaneous field of view but an in-focus
distance of 2.7 m; and the third image was obtained in the Survey mode, which
has an instantaneous field of view of 0.132° and an in-focus distance of
3.7 m. A fourth image (not shown) was obtained in the color mode, which has
the same instantaneous field of view and in-focus distance as the Survey
mode but uses a red, green, and blue filter during alternating line scans.
Image details of the three tribars are particularly interesting because
they reveal much about the overall camera performance. The large tribar is
distinctly reproduced in all three imaging modes. Contrast of the medium
tribar is slightly reduced in the Hi-Res 1 mode, significantly reduced in
the Hi-Res 2 mode, and reduced to near the threshold level in the Survey mode.
The smallest tribar is resolved at a very low contrast in the Hi-Res 1 mode,
and gives rise to a so-called false resolution in the other two modes (i.e.,
in this case two rather than three bars).
Table I presents a listing of predicted and measured signal values for
one of the grey patches, the three color patches, and the thr^e tribars. The
good agreement between predictions and measurements for the grey patch
(4 percent on the average) results essentially from the fact that both camera
and reference test chart reflectance calibrations have been made relative to
magnesium carbonate (Mg CO ), using the same NBS lamp. The slightly less
favorable agreement for the color patches (15 percent for red and 7 percent
for green .and blue, on the average) results from the fact that accurate
absolute reflectance measurements have not been made yet for these patches.
It may be concluded that predictions of the radiometric throughput of the
camera are accurate to within 10 percent, which is near the accuracy of the
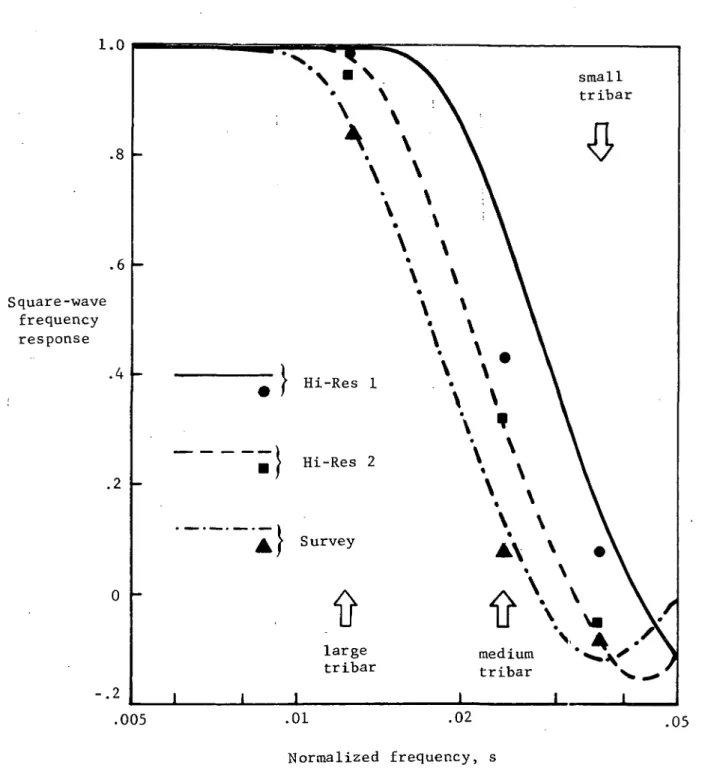
The agreement between predicted and measured tribar contrast is better
for the largest tribar (9 percent on the average) than for the two smaller
tribars. The reason for the poorer agreement for the smaller tribars is
easiest explained with-the aid of figure 3, which presents the predicted
camera square-wave frequency response and the normalized measurements of the
tribar contrasts. It can be seen that the fundamental tribar frequency
components near the steep slope of the curve and near zero result in the i
largest percentage disagreements. Such disagreements can readily result
from small errors in camera focus adjustments, camera-to-target distance
measurements, and tribar widths. It should be observed in particular that
the combination of highest camera defocus blur and smallest tribar does not
lead to the largest percentage disagreement since the fundamental tribar
frequency component occurs at a shallow inflection rather than steep slope of
the camera frequency response curve. Nevertheless, predictions and
measure-ments agree sufficiently well so that any appreciable image contrast
degradation caused by a camera problem can be effectively simulated.
Cone Images
Figure 4 presents a typical image of a cone, and a computer printout of
the same data which gives the quantization level of each picture element
(pixel). The signal-to-noise ratio of a cone is evaluated from this
experi-mental data as follows: First, the evaluator outlines the part of the cone
that is brighter than the background and the other part that is darker
(including shadow, if present). Second, he records the number of pixels,
N , in each section as well as their quantization levels, Q . The effective
5
'V
and the average signal excursion is
where Q is the background quantization level, and k the conversion
factor from quantization level to signal voltage; Q. > Q for AV , anc*
Q. < Q for AV_. Finally, the average-signal-to-rms-noise ratio is given
by the expression (ref. 1)
S AV+ + AV
V 2 2
N V b* + b n +
-where V is the rms value of the noise, n
The evaluator has to make somewhat subjective judgments during the
first step of the experimental evaluation whether or not he should include
a pixel along the boundary of the cone image as part of the cone. Errors in
judgment can be expected to lead to small errors in the final results for cone
images which contain many pixels (200 or more) as shown in figure 4; however,
the evaluation of such cones is very tedious. Cone images containing few
pixels (20 to 80) were therefore independently evaluated by three persons to
characterize typical variations in experimental results that are introduced by
their different judgments. Results presented in figure 5 show a typical
spread of experimental results. On the basis of these results, it was decided
(2) several cones that contain fewer pixels (about 40) per cone to check on
proper trends of the variations of predicted signal-to-noise ratios with a
variety of cone slopes and illumination and viewing geometry. A defining
diagram of the illumination and viewing geometry is shown in figure 6.
t
Figure 7 presents three large cone images together with predicted and
experimental results. Interesting intermediate results are the number of i
pixels contained in the brighter and darker-than-background parts of the
cone, N ; the final result is signal-to-noise ratio, S/N. Results indicate
that the experimentally determined signal-to-noise ratios tend to be slightly
higher than the predicted values.
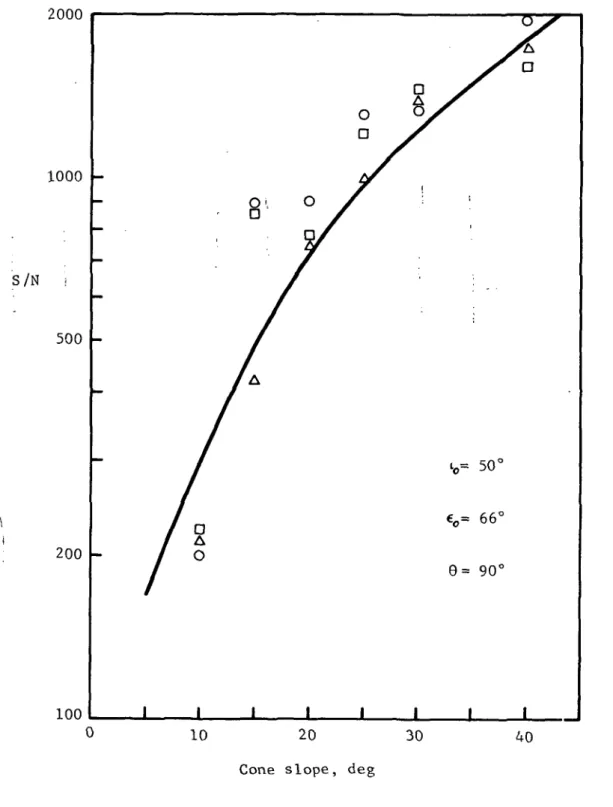
Figure 8 presents signal-to-noise ratio predictions and experimental
results for seven cones with equal base diameters (3 cm) but different slopes
(5° to 40°). The incident (i = 70°) and emission (e = 60°) angles were
kept constant, while the azimuth angle (6) between illumination and viewing
direction was varied in four steps from 45° to 180°. The average distance
from the camera to the cones was 1.4 m; the exact distance of each cone from
the camera was not accounted for in the predictions. As can b^ seen, the
predictions are in consistently good agreement with the experimental results,
at least within the accuracy to which the experimental data can be
quantita-tively reduced.
CONCLUDING REMARKS
A computer program for predicting the performance of the Viking lander
cameras has been described, and predictions from this program have been
compared with experimental results. The predictions were concerned with
pictures of a reference test chart and of cones covered with natural (basalt)
material. Predictions of the picture quality of selected reference test
chart features can aid in diagnosing camera performance. Predictions of the
picture quality of cones with surface properties of natural terrains can aid
in determining favorable lighting and viewing geometry and operational camera
commands.
Predictions of the picture quality of selected reference test chart
features were compared with experimental results for several camera imaging
modes, providing different angular resolutions, defocus blur, and spectral
responses. The predictions and measurements for the radiometric throughput
of the camera generally agreed within 10 percent, which is near the expected
accuracy of the absolute radiometric calibration of the Viking lander cameras.
Predictions and measurements of the camera response to three sets of tribars
on the reference test chart agreed sufficiently close so that any appreciable
image contrast degradation caused by a camera problem can be simulated by the
computer program.
Predictions of the picture quality of cones were compared with
experi-mental results for a wide variety of cone slopes and illumination and viewing
geometries. The comparison provided consistently good agreement within the
accuracy to which experimental data could be quantitatively reduced. The
experimentally obtained signal-to-noise ratios of cone pictures depended
somewhat on subjective judgments and tended to be slightly higher than the
predicted signal-to-noise ratios. However, the variations of predicted and
experimental signal-to-noise ratios agreed closely for all variations in cone
slope and illumination and viewing geometry.
that was used to describe the reflection characteristics of the material
used to cover the cones. The illumination scattering function that will
actually be encountered at the landing sites on Mars is, of course, less
certain. This uncertainty suggests that the dependence of picture quality
on lighting and viewing geometry should be investigated for a wide range of
.reasonable illumination scattering characteristics to establish a sound basis
for determining the preprogramed lander commands that automatically direct
camera operations during the first few days on Mars. The Meador-Weaver
illumination scattering function lends itself readily to this task since it
describes the diffuse reflectance of natural materials as a function of their
APPENDIX A
PERFORMANCE CHARACTERISTICS OF THE
LABORATORY FACSIMILE CAMERA
Although the laboratory facsimile camera differs greatly from the
Viking facsimile camera in many design details, it can closely simulate
those performance characteristics of the Viking camera which are important
to this investigation. This appendix presents a general description of the
laboratory camera design, and a detailed description of its performance
characteristics when adjusted to simulate the Viking camera performance.
General Description
A basic block diagram of the laboratory facsimile camera is shown in
figure 9. Radiation from the scene is reflected by the scanning mirror,
captured by the objective lens which has an adjustable aperture, and projected
onto a plane which contains the photosensor aperture. The photosensor - in
this case a silicon photodiode - converts the radiation falling on the
aperture into an electrical current. As the mirror rotates, the imaged scene
moves past the aperture permitting the aperture to scan vertical strips. The
camera rotates in small steps between vertical line scans until the entire
scene of interest is scanned.
The instantaneous field of view is determined by the photosensor aperture
size and distance from the lens. Different instantaneous fields of view can
be obtained by inserting different modules which consist of a photosensor
The mirror line-scan motion is directly controlled by a servo, which,
in turn, is synchronized to a clock pulse rate. An important part of the
servo-control is an accurate mirror position sensor (optical encoder) which
has three functions: (1) it aids the servo-control to achieve a linear
mirror scan synchronously with the clock rate, (2) it allows the selection
of any vertical field of view of the scan (i.e., of an image frame), and
(3) it provides pulses for sampling the video signal. Use of these
servo-derived pulses (rather than the clock pulse) for sampling the video signal
allows the photogrammetric accuracy along the line scan direction to be a
function only of the accuracy of the mirror position sensor, and to be
independent of small deviations from a constant mirror-scanning velocity.
Immediately after each vertical line scan of the scene, a pulse is sent
from the mirror position sensor to the azimuth rotation and filter wheel
logic controls. In the broad-band imaging modes, the filter wheel is
commanded to position an unfiltered opening over the photosensor aperture,
and the azimuth drive (which consists of a steppermotor and harmonic gear) is
commanded to advance at the end of each line-scan by a selectable interval
(in 0.011 degree steps). In the narrow-band imaging mode, the filter wheel
is commanded to rotate a different filter (out of three) over the photosensor
aperture after every line scan, and the azimuth drive is commanded to advance
after every third line scan.
As shown in figure 10, the photosensor signal current is amplified
using a different gain (RfG = R R_/R..) for each channel: high-resolution,
survey, blue, green, and red. The dark signal voltage (i.e., the voltage
level when the mirror is facing the blackened inside of the camera), is
Additional voltage levels can be subtracted from the signal by a programable
digital-to-analog converter. The resultant signal is then further amplified
by a programable gain amplifier and bandwidth-limited by a low-pass filter.
The programable offsets and gains permit the camera to function with selectable
dynamic ranges as illustrated in figure 11. The filter provides adjustable
bandlimiting of noise and signal prior to digital sampling.
Performance Characteristics
The performance characteristics of the laboratory camera, which are
important to this investigation, are the transfer functions of optics and
video electronics and the mirror scanning rate. Most of these
characteristics are listed in Table A-I. In addition, figure 12 presents the
relative responsivity of the photosensor, figure 13 the transmittance of
the color filters, figure 14 the frequency response of the photosensor
preamplifier, and figure 15 the frequency response of the adjustable filter
used to bandwidth-limit the video signal.
The linearity of the video amplification and processing circuits falls
within +1.0 percent of an ideal straight line for all gain settings over the
operating range extending from 0 to 5 V. The accuracy of the offsets is
within +5 mV of the stated value. Exact values for gain and offset are listed
in figure 11. The sample and hold circuit used for drift control has a holding
TABLE A-I
LABORATORY FACSIMILE CAMERA CHARACTERISTICS
Characteristics
Instantaneous field of view, 3, deg
Mirror reflectance, r m
Lens aperture diameter, D, cm
Lens focal length, f, cm
Lens transmittance, T.
Photosensor aperture diameter, D , cm 3.
Photosensor peak responsivity, R , A/W
Photosensor-preamplifier feedback resistor, R,., ohm
Signal equalization amplifier gain, GI
Picture elements per line
Field of view per frame elevation, deg
azimuth, deg; min; max
•
Elevation scan rate, X > deg/sec s
Azimuth stepping rate, deg/sec
Low- Resolution 0.132 0.84 i
1.0
5.5
0.9
0.0124 0.34 0.92 x 109 Survey: 1.56 Red: 15 Green: 36 Blue: 193512
67.584 0.132; 360520
Survey: 0.132 Color: 0.044 High- Resolution 0.044 0.841.0
5.5
0.9
0.0043 0.27 0.88 x 109 ' 17.5512
22.528 0.044; 360520
0.044APPENDIX B
IKRADIANCE CHARACTERISTICS OF LIGHT SOURCE
Two types of light sources were used in this investigation: National
Bureau of Standard (NBS) lamps and a spotlight. The former were used for
all absolute radiometric measurements, and the latter for most image
quality studies.
NBS Lamp
The NBS light sources are commercial G.E. type DXW-lOOO-watt lamps
that have a tungsten coiled-coil filament enclosed in a 0.95 cm diameter
and 7.6 cm long fused silica envelope, which also contains a small amount of
iodine. The lamps' color temperature range from 3000°K to 3050°K for a dc
current of 7.9 A. Each lamp is supplied by the National Bureau of Standards
with calibration data. Figure 16 presents typical spectral irradiance data
at a distance of 50 cm; the inverse-square law may be used to calculate the
spectral irradiance at distances beyond 50 cm.
Spotlight
The spot light is a 10 KW tungsten lamp with a 61 cm diameter Fresnel
lens. It is supplied with rectified 3 phase, 120 V power, and has an
effective color temperature of approximately 3200°K at the rated power.
However, the following procedure was used to adjust the spotlight to a
better known spectral irradiance: A grey reflectance card was first
illuminated by a NBS light source and scanned by the laboratory facsimile
were equal. The same grey reflectance card was then illuminated by the
spotlight and scanned again by the facsimile camera as before, and the
spotlight current was adjusted until the three color channel outputs were
the same.
The spotlight optics can be adjusted continuously from spot to flood
position. In the full-spot,position, the irradiance is concentrated toward
the optical centerline and drops off rapidly with distance from the center i
line. In the full-flood position, the irradiance is spread over a circular
area of about 76 cm diameter with +5 percent variations in magnitude. For
a setting of 5.5 (near the full-flood position) the irradiance at a distance
of 148 cm (as used during most tests) is 1.67 times the irradiance of the
NBS lamp EPI 1556 at a distance of 50 cm.
APPENDIX C
REFERENCE TEST CHART CHARACTERISTICS
A picture of the reference test chart (RTC) is shown in figure 17. The
paint surfaces concist of 11 grey reflectance patches, three color patches,
and three sets of tribar patterns.
Properties of the RTC which are of concern to this investigation are
normal reflectance (reflectance at zero illumination and emission angle),
illumination scattering function, and tribar dimensions. The normal
reflectances of the grey patches are given in Table C-I. Curves of the
normal spectral reflectance of the color patches are shown in figure 18.
The illumination scattering function for all patches is assumed to be
l Lambertian (i.e., cosine dependence on illumination angle and no dependence
on emission angle). The widths of the individual bars in the tribar
patterns are given in Table C-I.
All data presented here for the RTC are preliminary. Evidence exists
that significant deviations occur from these nominal values for reflectance,
illumination scattering function, and bar widths. These deviations may
account for some of the differences between predictions and measurements that
have been encountered. Measurements of RTC characteristics have also revealed
target-to-target variations. The specific RTC used for measurements must
TABLE C-I
REFERENCE TEST CHART CHARACTERISTICS
Grey Patch Reflectances
Patch Number
1
2
3
4
5
6
7
8
9
10
11
Reflectance.11
.15
.20
.25
.30
.35
.40
.45
.50
.60
.79
_-. — Tribar Large Medium Small Tribar Widths j Width, mm/£p ', | 6.43.3
2.2
27
APPENDIX D
THE ILLUMINATION SCATTERING FUNCTION OF A
PARTICULATE SURFACE OF COLORADO BASALT
Meador and Weaver (ref. 2) have proposed an illumination scattering
function that describes the diffuse reflectance of particulate surfaces as
a function of their physical properties (particle albedo, size, and packing
density). This appendix presents this function, the geometrical relationships
necessary to use it in the prediction program, and the pertinent scattering
and physical properties of the Colorado basalt surface used ia experimental
image quality studies.
The Meador-Weaver Illumination Scattering Function
The scattering function given by Meador and Weaver is (ref. 3)
- £' 8) = cos
+ a., (cos i + cos e))
where i is the angle of incidence, e the angle of emission, g the phase
angle, and a , a , a are empirical parameters that contain information
about the surface. The factor f(l, e, g; a~) is given by
f(l, e, g; a2) = e
1/2
+ v/1 exp{y - -£— (3TT(2£-l)x + 6 x sin~x + 2(2+x2) (1-x2) ) }dx o
all other values should be replaced by f(i, e, g; a~) = 1. The parameters
y, V, and £ are given by
4a (1 + cos g)
v =
3 sin g
?
(cosi + cos e)[cos y 4- cos (g-y)]cos K
sin g cos i cos e
_ _ (cos i + cos e) cos y cos (g-y)cos K
[cos y + cos (g-y)] cos i cos e
The parameter K is the angle between the surface normal and the scattering
plane (the plane containing the incident and emission directions), and y
is the angle between the incident direction and the projection of the surface
normal on the scattering plane. The function 4>(l, e, g) is normalized to
unity at i = e = 0°.
The parameters a , a , and a are empirical parameters which relate
certain physical properties of a surface to its scattering properties. While
precise quantitative relationships between a and the physical properties of
the surface have not yet been established, approximate relationships have
been determined; a and a, are related to particle albedo and size
distributions of the surface, and a» is related to the packing density of
the uppermost particles comprising the surface. A more detailed description
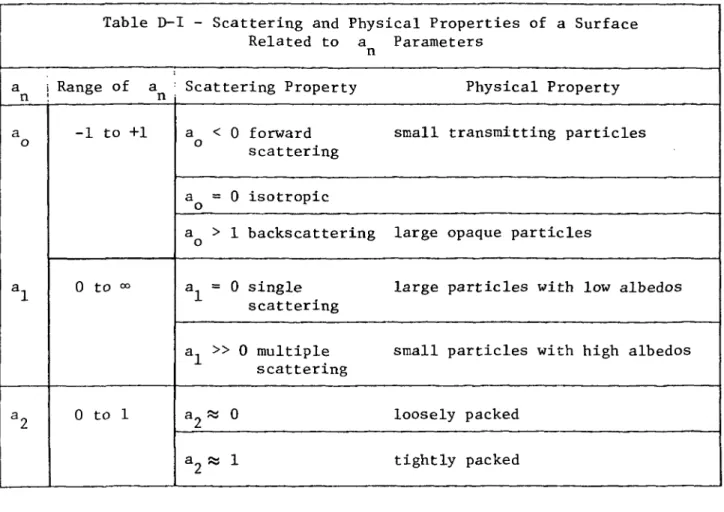
of these relationships as summarized from ref. 3 is given by Table D-I below.
Table D-I - Scattering and Physical Properties of a Surface Related to a Parameters
n
a Range of a : Scattering Property n i n a -1 to +1 o a 0 to °° a2 0 to 1 a < 0 forward scattering Physical Property
small transmitting particles
a =0 isotropic a > 1 backscattering a = 0 single scattering a, » 0 multiple scattering a Ki 0
large opaque particles
large particles with low albedos
small particles with high albedos
loosely packed
a « 1 tightly packed
Geometrical Relationships
The two angular variables K and y in the Meador-Weaver function and
the angles i, e, g, and 6 used in the prediction program are related as
follows:
sin K=sin i sin £ sin sin g
sin y = sin \ (cos e sini - cos 6 cos i sin e) cos K sin g
Properties of the Material Used for Experiments
A surface of Colorado basalt (mafic latite porphry) with a particle
size range of 150 to 300 micrometers and a mean particle size of 180
(D-2)
scattering function of this surface has been measured by Meador and Weaver
(ref. 3) for coplanar values of incident and emission directions. Values
of a were determined iteratively using equation (D-l) to fit their
experimental data. The values of a were determined to be n
a = -0.4 : o
a^ = 0.28 a_ = 0.32
The validity of using the Meador-Weaver scattering function for
non-coplanar geometries of incident and emission directions has not yet been
proven for the Colorado basalt surface.
The albedo of the Colorado basalt surface was measured relative to
that of Magnesium Carbonate (MgCO ) with a light source having a color
temperature of 3000°K and an unfiltered silicon photosensor. The albedo
of MgCO is approximately constant over the silicon photosensor responsivity
range, so that for this particular condition the albedo of bt.salt may be
taken as
/S(A)p a)T (A)R(A)d
-0.97)<0.20)-0.»
where the factor 0.20 is the measured ratio.
REFERENCES
1. Huck, F. 0.; Jobson, D. J.; Taylor, E.J.; and Wall, S. D.: Formulation of Image Quality Prediction Criteria for the Viking Lander Camera. NASA TM X-2802, September 1973.
2. Header, W. E.; and Weaver, W. R.: A Photometric Function for Diffuse Reflection by Particulate Materials. Prospective NASA TN.
3. Weaver, W. R.; Meador, W. E. ; and Wood, G. P.: Values of the Photometric Parameters of Mars and Their Interpretation. NASA TM X-71949, May 1974.
rl CU W $.** w B~S 3S rH PH W 6-«
c
0)2
s
o Pi W 6^2 T) £ « CO •H PL, CU rt W X B~S U CO >. M CU1 £
s crt -1 , U W PH W 6-S CM CO CU f* S ••H .... , , . ffi CM w B3 r— 1 CO cupi a
•rl PC Pk Referenc e t Char t s <• vO CN rH m H <!• • m r^ m vO ^3-r~ CTi * -3-CM m oo -* co r~ vi-vo M3 CN • m oo m m ro o\ CM • m <)• -j-• m CN m CN m -* CO • m Gre y patch : % reflectanc e m r~- oo r-l rH VD CO CN rH cy> o en r* <y> CN • • • rH in -* r^ oo VO CTN CT> • • • m rH ro m CN •* r*. m o in <r • * • rH CN rH rH O OO <r m ro oo • * CN rH r*. in vo CN f) P^ OO oo r^ o VO rH CO m oo tH CO CO CT» r-« rH CN vO -J- O rH rH m vo vo CTl O- O vo m oo OO rH CO rH r^ O\ * • • oo in oo CN rH VO rH r-~ <N oo O m rH • • • t-~ in oo CT> r-» CN cr> in r-. r~» m oo CO rH VO rH c^ CN m oo m o vo m oo >* vo m oo <r m r^ m oo Colo r patches : Re d Gree n Blu e CT> <Ti cs) CO -tf -* m vo CN <f rH OO O\ CN <O 00 • • * <r i m cy> vo o -* m • • • -* 1 t-~ vo sr rH m CO CO vo P~ rH CN CO • • * CO 1 CO vo CN r-» •* m * • • CO 1 vo o m rH 1^ rH vo •* r-~ O CN m • • • CO 1 00 «* CTi m <• <r • • • CO 1 r-~ co o co <r cr> oo oo oo to co • • • CO 1 00 CO f~~ rH m m -a- i 00 CTi (* <r VO r^ rH CO •* CO • • • <T rH | rH in rH r~ ro m • • • -* rH 1 co c^ co CO VO cy\ o m m o co • * • •<r CN •<r r- rH i*> a\ r*~ •3- CN Oi O-. P-< 0? 0? Oj CO vo vO -J" ,Q . •H CN vO -J-}-l i-l H n) CO M 0) cu co tfl PM o Vl V4 w o>a
0) o cu PM o •H O •iH Vi PM O O PuSi-ll
w
4J p! CU IIs
< I N P U T DATA V
V j
I —^ I N T E R F A C E R E L A T I O N S ,>— 1
Spectrally-dependent camera and environmental parameters: Camera optical throughput: TX c = TX w, TX w2 Tx_m TX
Al = /SXTx ( ' o )( )XTX . cRXd X A2=/X SXTx ( ' o )X| ) TTX . cRXd X
Surface radiance and camera response weighted average wavelength :
• Optical geometry-dependent camera parameters: Laf _ "a _ JL 2 i 'a = L7T " = -Ta kp = 16 D » • Normalized photosensor signal current: I = and preamplifier output voltage: v' =
• Normalized camera parameters:
Photosensor aperture radius: Va = y= (-pj 0
Defocus: U = ^ r IT-) / - / , . / = L f / ( L - l > XSD Mirror scan rate to frequency:v = kv$. ky =
Camera selectable dynamic range: '(lz)
-O.n. 5 Olfset number G.n. s Gain number
• Electronic parameters:
Electronic noise: Total noise:
,1/2
V ( n ) = l' R
Quantization noise: frequency response: sin7rtsu/2 lit, u/2 • Camera: TX . w rTX , w 2 ' rX . m 'TX . / "Da' V RrG-El( w l- E2<u'. . RX. D. f BW. kc
• Environment: • Reference test chart: TX . b -rX . g -rX . r -rr VK1 'K2 'K3
i =1.2. ....11 ^ »
• Illumination and viewing geometry:
i—
I -«^ B R O A D B A N D I M A G E Q U A L I T Y S 1
R E F E R E N C E T E S T C H A R T . I M A G E Q U A L I T Y
L
• Reflectance of color and gray scales:
r ' = r c o s t . r = ^ b. rx g. rx r . fj , where i = 1. 2. . . . 11 • Reflectance excursion of tribars:
r' = fir cost
• Spectral radiance: NX . r = 7SX ' x ( ' o )r'
• Spectral power falling on photosensor aperture: PX . r = *KpNX . r
• Photosensor signal current: [ • Preamplifier signal voltage: V • Digital data level: D
= lc/PX . rTX . cRXd X r =G Rf ' r
"(Vr"Vmin) r vmax vmm
• Number of pixels per line pair width of tribars : K = -^p- K . where K is width of line pair • Normalized frequency of tribars in image plane:
s- T » i i_
s- * TT K /a
• Normalized signal excursion:
is- 4 [A ar1 MM c(i..lsln»A
71
h^t '
iVaS"
/KLj-a-i -*
1
• Photosensor signal current: AIr = kc bSff T R dx • Preamplifier signal voltage: AVr = G R(a lr
_„ .„.. "(V^min) max min N A R R O W B A N D I M A G E Q U A L I T Y • Noise-equivalent radiance: V < N E R > = -T /Nx dX
•' Minimum detectable albedo difference: 3V.
L.
• Cone shadow geometry:
g = cos (cos EO cos i + sin E sin i cos e) Z = 2 cos a cos E (tan t h " C h ' tan f t ( \
where C = 7 ( tsh + *sh ' 8) . 5sh = cos"1 (tana tan t()) ' sh \ o/
II 9 i ^ t 0 :
tan J - £ = 0
• Approximate cone scattering: It = 0 1 £ i Q 1 o V o o / E 0. (E, t.gicos e j *+ E C O S E , - i - -9 - „ - + + o £ OjlE.i.gicos E. £ cos E! +Z/6 ' ' ' ' '9 ° o • Maximum scattering:
During above computations las a function of if}-. i f* i > 0m a x 'l e t C )m a x= ( tia n d *max= *i Then compute <s>.f as a function of a at *max:
t '
• Signal voltages: • Digital data levels: ^V.^ = V' 0 "( vo/ " vminj /„ N -V. ° o D'J° V m a"'V™" \vmax/ ~ v max
,,. „ « 63 ( /V N - V } AVt = V B+A O )t ON _ V \ max/ min/
AV. = V B. 40. maX ma)C min
1
J
• Cone slope and normalized diameter:
If both a and c are given: compute c = D /pi
• Normalized radii of approximated cone areas:
"+ - c I 2;r cos a f C O S Ci( • « j ":- ' - 9| > »o
1 6 Z I172
"- - c 1 2ff cos a r cos Ei " 2^ cos o ) • *i ( E'1 -gl ( *o
• Normalized signal excursion:
Bt ' 2 / b v s " S Llu.sl Els) s d s o L J
1 • SignaHo-rms-noise ratio:
(N) vn ^T^T
If {-jg-} • SNR < 1.0. then print out slope a. normalized cone diameter c, and actual cone diameter D = c p L
M
a
• to (0 3 (-1 O O C U 6 C co co O 4J -C S cu co i^ JJ 4J -4-1 CO CN C M C M-l CO c cfl <N CO *T3 T3 O 01 01 4J C CO CO -i-l 0) O CO U O 4-1 C i-l .C CO O 4-> 4-1 CO M 0) -i-l CO M *O CJ S co 3 4J CO O CO 01 O 0) U-t *-> C <U CJ -H O -i-l C Q.T3 o> C )-i CN CO •O O) 01 U •H cfl CO 4J 4-1 CO fO -H 0 T3 CO CO co 3* 8
01 m 3 C 4J -H O 0. co a) oi -d1 I O •r4 • CN O 13 <4-l d o en co cy 3 fc i-l O) 3 -H 4J CO > U U •H OfJ "4-1 O. I O •H 0) SC T) (U .-I I-l (U 0) H H *W I CN OI5
•H 4J O >> o) r-l -i-l O) > -r-l >4-l 4-1 O O <u -o D4 ^1 co Ol 01 •>-<1.0
.8
.6
Square-wave frequency response.4
.2
.2 .005 large tribar.01
.02
.05
Normalized frequency, sFigure 3.- Predicted square-wave frequency response of the camera for a target located 1.0m away, and normalized tribar contrast measurements.
in ^ OJ O-J un ID OJ CM — OJ CM OJ r-w ID OJ CM ro CM OJ CM CM G) CM OM un in CM OJ is- tf CM CM ro — • OJ OM in oj OJ CM -rt- ^ OJ CM Ki ^-T OM OJ
<rir
OJ OJ «-" IT, OJ OJ ^j r°o OJ OJ OJ ^T OJ OJ OJ — i p, 1 {-, 1 ISJ I SI in t OJ OJ oj ro OJ OJ OJ OJ cn G) •-1 OJ^r
—
CM CM KJ ro OJ CM ro -sT OJ OM ro CM f\\ (-, \ I.SJ I -J m G> CM OM — CM OJ CM — * G) OJ OM G) — ' OM CM LD ^ CM OM : %W:fe- 9
r •
lflllaii»,«i : CM OJ T^-OJ Tf O-j -J OJ TTJ-0-J CM OJ OJ O-J O-J OJ OJ CM TJ CM •sj CM ^ OJ ro OJ un OJ ro OJ G! OJ Ki OJ Ki OJ ro OJ OJ ro CM _ CM OJ OJ , — ( OJ ro f, i l \1 O-J OJ _ OM rf CM ro CM ro OM ro OJ in OJ CM CM U) CMin
CM ^j-OJ ro OJ in O-J — , OM in O-J TJ-O-J KI OJsr
'. ''J rs. OJ KI—
OJ Tf 1. 'J in OJ OJ 0\J ro OM CM CM CM <Nin
OJ GJ CM .-. i ISI ro CM un OM „ CM O-J OJ ^j-CM ro CM in CM ro CM •sT OJ •st OJ ^lj OJ in OJ OJ OJ ~H OM in OM in OJ OM OJ •3 CM OJ OJ in OJ OJ OJ LD OJ OJ U""J OM rn CM ro CM ( •st 1 OM Ki 1 O-j I r- 1 I XI OJ CM r- i CM ( — ' O-J ( _ OJ ( in c OJ ( [M fM M D ^1 ro [M n M n M n "M T-, M M M "O -••1 •O 'M D M >O "\|jr
~"J -'•J ~sl D '•-J M "sl•o
'J — i "sl M M •O M M M O M n M -i 1 SI 0 M 0 M -SI — H M M M un OJ |S-OJ (X_ OJ ro 0-1 un CM ID CM ro OJ OJ O-J OJ CM ro O-j ro CM on CM ro ™ OJ CM OJ 1. '--J ^t OJ OJ Kl Oj O-J CM CM ^j CM ro CM in CM 7^ ro OJ ro O-J ro OJ ro OM OJ CM on CM UJ OJ '-D OJ un OJ |S_ OJ ro OJ in CM in OJ h-OJ in CM TJ OM U3 CM in OJ ^3" ro OJ TJ i. '--J O-J OJ CM ™ OJ TT" CM ro CM O-J OJ Osl CM tj-V OM OM O-J CM in OJ ro OJ 'D OJ rt OJ CO OM |S_ O-J f^ OJ cn CM G) ro in OJ un OJ CO O-i 0 ro is_ OJ r-CM rs. CM CO '. M |S_ OJ r--OJ ro OJ ro OJ *•]'' OJ x-']" OJ OJ CM *— 4 CM ,_ O-J OJ OJ ro i-H OJ •3-CM m ^H CM CM ._ CM _ CM CM CMro
O-J IS) •••-J OM ~M -CM OJ OM ••i o.i '• v —.cn LH TI oj in oj is) is. CD ^r ro on 'Xi ID ^ in — • oj to u. ro CM ro ro *t %r t io ro ro ro ro oj IM OM oj CM o-j r . ;•-; r; oj Q in Q ro — CM co ^r ro ro OM co ID un is. T ^r ro oj CD OM ro ro ^ ~3 *i *\r ro ro ro ro ro o-j CM o-j CM OM CM o-i CM OM o-j OM ift ~* in — • on o~'i cn in in *-? K' o~' ^ ^ ^~ ^ ^-j" ro ^-l* JT ro ro ^ \r •sT ro ro ro KJ ro ro ro CM oj CM OM CM o j oj OM oj ro r- *t ^ — r-- in on r- OM co cn ^ oj t *T *r ro ro OM — • ro KI ^ \r ^r ro ro ro ro ro ro CM CM oj CM OJ CM CM CM OM oj — • ^ OM 'sT cn on ^r ro in ro — • cn cn in in \T — • r<- ro CM ^J ro KI -st 'st ro ro ro ro ro ro ro CM oj oj OM OM CM o-, CM o-j oj co rs. — oj cn un CM •sT oj OM co co un is- iri ^ ro ro CM f r- 1 ro ro •sT %T ro r> j r-n ro ro ro OM CM OM CM o-j oj oj o-j OM o-j OM cn cn — < — ' co in ^r cn un J-D un u"i r- un 'sT ^ — • m CM in ^ CM ro 'sT ^T ro ro ro CM CM CM oj oj oj oj oj OM oj — CM OJ oj in b) ^t GJ in CM OM KI in r-- cn un ro ro T — • CM ID T CM co ro •sT ^r •sT ro M ro ro OM CM oj CM oj oj oj oj o.j CM oj CM OM co — « co is- ro ~-i cn is. -q- T in •sT UT in r^ in —• CM oj — « -« M ^T r- i ro r«n ro OM OM TM OM OM OM OM CM OM OM CM CM CM OM OM M un in OM cn ID co m OM •st — « G) r-- G> OM G) on CM oj E — • ro ro i-o ro CM OM OM OM CM OM CM CM ~- OM oj oj — • cv OM OM oj ro OM — • is. un 'J KI un ro — < so ro ^ T oj GD CM <^< ^^ — * rM ro ro ro CM CM CM CM OM oj oj CM CM OM OM CM CM o-j oj o..1 o-j CM
CM (S3 IS, Un OM O ^ OM CS3 — ' (Ti CTl — • OJ El — • D H . — ' — ' — • ro ro CM CM OM CM CM CM CM o-j — • — CM CM CM OM CM 01 OM r-j CM cn ^t ^^ un r-- '^ KI GI co di co r- r-- co Q CM LO '1 '-• G:> G) co co un UT is. un co on un in un in ID on KI r-- 0 ro CM — < G) ^T in oj CM ^t Lii ^J u~) in ro oj ro in cn co GJ *^ " " ^ CD oj l.£l l£l f-_ CQ — * — i ^ Tj y-i f.j ,-,j p.j Q-, (^ _^ jTT, ^3 L:;. fl.j pj p.j oj oj ui LD cn co oj — CD ro oj ro LD co Q o ro if in ro ^ r-- cn ^f ^ UT N. LO co r-- co GJ EJ 'T r-- r-- cn on o; f"1;; 'st oj G) cn in •sT ro "st un r-- un cn OM in r-- r- r-- co — ro o-i ro 10 CTi ^^ ^ ro CM ro "sT ^ un cn cn cn ro r-- cn CD OM r^ u~' ro cn ~-" — ' — i —i — ' OM O-J O-i O-J IM '-' on co ^ ro — • ro ro ^ q- in ID co un ID on o GJ K — in OM — ' — — ' ~ — — OM OJ O,' O-J OJ OM cn ro uj CM CM CM o-j o-j CM CM ^-T on CM 1 T-J" r- co K s — — • — i — i r-i — i — i — i r-j c ; ,M CM CM GJ \r u~i ro OM — ' oj OM OM ro in m —i \r cn T — er cr. o-; GJ
OJ — • — —i —i — i O.J O-J «- -1 OJ OJ
ID oj 'xT ro OM oj OM OM — • — • \r CD — T un on — < ~:: in in a — i — < — i -< —. — • —i O-J O 0-1 CM OJ
*-> r- on ro OM ro CM OM CM CM un ro r- un T co — ' r' oj — — •
G) KI — • ^t oj ro ro oj CM oj un CD ui u ~> i - cn — ' - • o-.. — o'i OM o-j — • — i — ' — < — t —i CM r ; o; o-j — • — • r- ro m ro ro ro CM CM ro cn CM •tf r- — • o-i OM • ; to — • o OM — i — i — i — . — . OM OM OM C1 ! O-j CM CM Q o in co ro CM o-.j CM CM ro r- — • in un cn ro cn --• CM LH rj OM OM — — i — ' —i — ' CM — i r ; o-j CM CM OM CO ^f CO CM OM CM CM — ' iO CTl OJ T-- IS- 0"i G) CTl r : \T CM G) ,-..] _ _ ^_, _ ^, rt r,J _ Pi PJ PJ P.J OM — • r- o-j ^r CM OM CM CM •sT o in r- cn cn — • G> i'i CM — — OM OM — ' — ' — i —i — — ' •-" OM OM Oi OM OM OM co co co in in OM OM OM ro LIT CM on cn — — • CM co -' CM r-i oj OM OM — ' — ' — i — ' — i O-J OM CM CM Oi CM OJ OM OM ro —• co co fo o-j OM ro un un on CD GJ o ro CM ~ T co cn i.M f'-l CM —i — i — i CM OM OM OM CM 01 O'-j 0--; — • — • co CM co co ID r-i ro " cn •st on co cn cri CD e> e< — < ra o O-J —i CM CM — • — i — i (-,j —. « CM OM l-l CM Oj OM ro oj cn cTi cn OM ID KJ r- ro — • co r- cn — CM — — < ro in in CM CM — • — • —i — i —i CM CM — ' — • OM CV CV 0, CM CM O-J CM ro CM so co u m r- OD <", rn n o o ro — ' co -• — • cn — OM CM OM O-j — —i -^ ^ — . CM CM OJ OJ OM O-i CJ OM — • CJ — ro n oj —i on ^r ro in cn on cn G> — > — CM OM <,-•• -—• oj --1 G) G) — ' — i r- r-- un in r- Q — • oj ro ro OM — T •-.- in CM G? —i CM 'sT CO CM OM CO CO CO GI O D OM TO O-J CM 0-.' CM — — ' OM OJ OM 0-1 O-j OJ —• CM CM O, O-J OM CM OM OJ CM OJ CJ f J Oj CM *-• ri G) cn F, cn o r-j co r- - - o ro rn o-j ;;: \r 7: oj C i C i OM *— ^-i ^-^ r..i P.J T— i --^ pj p^j ^%J pj f-j rj i" ; '-^ i i CM — — oj IM U: ••-• oj T m r-. — — i r-i ^r o; o-i - •' :-; --i
ro CM •^j OJ ^* OJ IT-I in OJ _ OJ OJ CM OJ OJ ro OJ OJ OJ OJ OJ OJ OJ CO O-J ro OJ — • — 1 •• J LTi OM ro cn "-• ro CM ro O-J o O-J OM OM O-J OJ OJ ^H CM CM O-J CO OJ ro OJ ro OJ KI OJ ^ OM
in
C j „ OM cn — O-J CM OJ O-j C J -}• CM OM OM OJ OM OM CM ro OM rj OM OJ OJ _ OJ in OM q-CM rt OM OM OJ G3 OM O'J •VT 1 ' J O-J OJ OJ ro OJ ro OJ G) OM r-_ CM ^_ CM O CM Tj OM ^1 O-j ro OM G) OM — , OM OM OM ^j OM T} OM in CMro
OM rt CM _ OMcn
Z
CM •3" OJ 31-I M f-J Cfl 4-1 tfl 14-1 0 4-1 3 0 •^ •H M p, ' D Ou Un
n) <u M2
0 •H O, (U C 0 CJ cd •H (X 1 ^(U u 3 60 j fe2000
1000
S/N
500
200
100
= 50 <
9= 90
CI
I
I
10 20 30
Cone slope, deg
40
Figure 5.- Comparison of predicted signal-to-noise ratio with measured
results independently obtained by three evaluators. The
camera Survey mode was used with an in-focus distance
equal ot the approximately 1.4m distance of the 3cm diameter
cones.
I
0) 60 60 C •H I •H a o •H 4J fl fi •r-l Q) VJ 60 •i-tA-imuth angle,9 90C Cone parameter Pred. N+ N-S/N 130 203 1695 Meas . 181 194 1901 45° N+ N-S/N 186 147 1382 238 157 1565 180C N+ N-S/N 65 269 1456 95 276 1842
Figure 7.- Predicted and measured signal-to-noise ratios for a cone with a 3cm diameter base and a 25° slope. Also given are the
number of pixels contained in the brighter (N+) and darker (N_)
1000 500 S / N 200 100 0= 90° 1000 500 S/N 200 0= 135° 100 I 0= 180° . 10 - 20 30 Cone slope, deg
10 20 30 40 Cone slope, deg
Figure 8.- Predicted and measured signal-to-noise ratios for cones with • a 3cm diameter base and various slopes. The camera Survey
mode was used with an in-focus distance equal to the approximately 1.4m distance of the cones. The illumination and viewing angles were to => 70° and «o = 60°, respectively.
CO t-t cfl o •1-1 S •r-l CO a cfl o 4J CO O CO _< <4-i O
e
00 CO •H O O ffi I 3 to •1-1I IS a CO u •r-i C O S-j W O 0) O 0) C8 C cfl 4-1 O 6 cfl S-i bO O O r-l PQ 60 •r-l
Discrete video levels 16 10 12 14 16 ; 18 Offset number 20 22 24 28 30 32 Offset Number 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Offset Voltage .000 .156 .312 .469 .625 .718 .937 1.094 1.250 1.406 1.562 1.718 1.875 2.031 2.187 2.343 Offset Number 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 Offset Voltage 2.499 2.655 2.811 2.967 3.124 3.280 3.436 3.592 3.748 3.904 4.061 4.217 4.373 4.529 4.686 4.842 Gain Number 0 i 2 k 5 Voltage Gain 32.01 16,04 7.99 4.01 2.00 1.00
I I I I I I I I I I I I I A/\V .3 .2 .3 .4 .5 .7 .8 X, urn .9 1.0 1.1
Figure 12.- Responsivity of silicon photodiode,
I I
.2
-Blue Green Red
.3 .4 .5 .6 .7 X, um
4 v, KHz
Figure 14.- Frequency response of photosensor preamplifier,
i.o .8 .6 o- 4 m • * .2 J I | I i I I I .3 .4 .5 .6 .7 .8 .9 1.0 Normalized cut-off frequency
30 25 20 X', 15 mW/cm -|im 10 I i | I I I i I j [_ .3 .4 .5
Figure 16.- Typical spectral irradiance of NBS lamp at a distance of 50 cm when operated at 7.9 A.
l.Or-.8 o