Imperial College London Department of Chemical Engineering
Model-based multi-parametric programming
strategies towards the integration of design,
control and operational optimization
Nikolaos A. Diangelakis
Supervised by Prof. Efstratios N. Pistikopoulos
Submitted in part fulfillment of the requirements for the degree of Doctor of Philosophy in Chemical Engineering of Imperial College London and the Diploma of Imperial College London.
Declaration of Originality
I herewith certify that all material in this dissertation which is not my own work has been properly acknowledged.
Copyright Declaration
The copyright of this thesis rests with the author and is made available under a Creative Commons Attribution Non-Commercial No Derivatives license. Researchers are free to copy, distribute or transmit the thesis on the condition that they attribute it, that they do not use it for commercial purposes and that they do not alter, transform or build upon it. For any reuse or redistribution, researchers must make clear to others the license terms of this work. Nikolaos A. Diangelakis
Abstract
This thesis discusses recent advances towards the grand unification of process design, con-trol and operational optimization via multi-parametric programming techniques. First the PARametric Optimization and Control (PAROC) framework is presented together with a prototype implementation for the development of advanced receding horizon policies via multi-parametric programming and their closed-loop implementation. It is shown how state-of-the-art multi-parametric programming algorithms are utilized for the development of explicit optimization policies for a variety of problems (including control, estimation and scheduling) based on high-fidelity models and model approximation steps.
Two developments are presented towards the integration of design, control and opera-tional optimization within PAROC; (i) the integration of design and control and (ii) the integration of scheduling and control. For (i) we develop receding horizon optimization for-mulations where the design variables are simultaneously considered, resulting in explicit, design–dependent policies which are then included within a Mixed-Integer Dynamic Opti-mization (MIDO) algorithm minimizing operational and investment costs. For (ii), we de-velop scheduling strategies where the process dynamics and corresponding controller designs are simultaneously considered, resulting in explicit control–dependent scheduling schemes. Surrogate/approximate models are proposed to address the time–scale mismatch between the mid–term schedule and the short–term control optimization problem. Finally, the inte-gration of (i) and (ii) is shown within an overall dynamic optimization problem.
The developments are presented via a domestic cogeneration heat and power (CHP) system example and case studies of a tank, a continuously stirred tank reactor and a binary distillation column.
Acknowledgements
I wish to express my deepest gratitude to my academic supervisor Prof. Stratos Pistikopoulos for being an inexhaustible source of motivation and support through my graduate studies. His guidance seemed always perfectly balanced; enough to stir my research to the right direction and at the same time, allowing me to follow my own ideas and help me develop as a researcher. For this I will always be grateful. My special thanks to Prof. Sakis Mantalaris who supported and helped me through the course of this thesis. I would also like to thank Prof. Lazaros Papageorgiou and Prof. Vivek Dua for the fruitful discussions and support that they offered. I extend my thanks to Prof. Benoit Chachuat, my academic mentor, for the help during the initial stages of this PhD.
To my external and internal examiners Prof. David Bogle and Prof. Ruth Misener: I always considered the viva examination to be the most stressful procedure of a candidate’s PhD life. My viva examination, although tough and challenging, was one of the most enjoy-able experiences of this journey. Rarely has a candidate the chance to discuss the contents of their thesis to such breadth and depth and receive meaningful feedback that improve the output of their work. For that memorable experience, I sincerely thank you.
Financial support from the European Commission (OPTICO G.A. No.280813, PIRSES G.A. 294987), the EPSRC (EP/I014640, EP/M027856/1) and Texas A&M Energy Institute is gratefully acknowledged.
Throughout the course of my graduate studies, a number of people have contributed to my academic and personal development. I’m thankful to Christos Panos, Eleni Pefani, Romain Lambert, Matina Zavitsanou, Irene Velliou and Giorgos Kopanos for welcoming me to the group as a master’s student and helping me acquaint myself to advanced process optimization and control. I will never forget “the gang” and the challenges we faced – Ioana Na¸scu, Maria Papathanasiou and Richard Oberdieck. My thanks also go to Muxin Sun and Styliana Avraamidou for the laughs and hard work we shared.
I’m also grateful to Baris Burnak, Justin Katz and Gerald Ogumerem for putting up with me when deadlines were tight! I am most grateful to Fani Boukouvala and Chris Kieslich for standing by my side during rough times. Alex Niziolek, Onur and Melis Onel, Burcu Beykal, Doga Demirhan, Will Tso and Yuhe Tian your company was refreshing in times of drought.
I am most grateful to my family who stood by my side during the brightest of days and the darkest of nights and believed in my dreams. Last but not least, I would like to thank my close friends who were mentally here although physically far away: Thanasi and Katerina, Manoli, Prokopi, Sofia, Haris and Stefi, without you it would have been impossible!
Dedicated to my parents Angelos and Vasiliki,
my grandmothers Maria and Eleni,
Contents
1 Introduction 1
1.1 Introduction and Overview . . . 1
1.2 Towards the integration of design and operational optimization - The problem 2 1.3 Objectives and outline of this thesis . . . 4
2 PAROC: PARametric Optimization and Control 6 2.1 Introduction . . . 6
2.2 The PAROC Framework . . . 8
2.2.1 ‘High Fidelity’ Modeling and Analysis . . . 9
2.2.2 Model Approximation . . . 9
2.2.3 Multi-parametric Programming . . . 10
2.2.4 Multi-parametric Moving Horizon Policies . . . 11
2.2.5 Multi-parametric Moving Horizon Estimation . . . 15
2.2.6 Software Implementation and Closed-loop Validation . . . 18
2.3 Case study – Distillation Column . . . 19
2.3.1 ‘High Fidelity’ Modeling . . . 20
2.3.2 Model Approximation . . . 22
2.3.3 Multi-parametric Programming, Control and Estimation . . . 22
2.3.4 Closed loop validation . . . 24
2.3.5 Conclusion . . . 25
2.4 Concluding remarks . . . 25
3 Modeling and optimization of a residential scale cogeneration unit 27 3.1 Introduction . . . 27
3.1.1 Decentralized energy systems . . . 27
3.1.2 Combined Heat and Power Systems . . . 29
3.2 Domestic CHP model . . . 30
3.2.2 Intake and exhaust manifold . . . 37
3.2.3 Internal combustion engine . . . 38
3.2.4 Engine cooling system . . . 47
3.2.5 External circuit . . . 48
3.3 Simulation results . . . 50
3.4 Design optimization . . . 55
3.5 Concluding remarks . . . 59
4 Decentralized multi-parametric Model Predictive Control for a residential scale cogeneration unit 61 4.1 Introduction . . . 61
4.1.1 Decentralized Model Predictive Control . . . 62
4.2 The residential CHP system . . . 63
4.3 The dual subsystem control approach . . . 67
4.3.1 Decentralized Model Predictive Control in Mode 1 . . . 67
4.3.2 Decentralized multi-parametric Model Predictive Control in Mode 2 . 68 4.4 Multi-parametric Model Predictive Control Development . . . 69
4.4.1 Approximate models . . . 70
4.4.2 Multi-parametric model predictive control . . . 75
4.4.3 Closed-loop validation and results . . . 80
4.5 Concluding remarks . . . 83
5 A simultaneous design and control optimization approach based on PAROC and classical control 84 5.1 Introduction . . . 84
5.2 Design and control of the domestic heat and power system . . . 85
5.2.1 State-space model approximation . . . 87
5.2.2 Simultaneous design and PI control optimization . . . 87
5.2.3 Multi-parametric model predictive control . . . 90
5.3 MIDO formulation - Handling the discrete alternatives . . . 91
5.4 Scheme evaluation . . . 91
5.5 Conclusion . . . 94
6 Design and control optimization: A simultaneous approach by multi-parametric programming 97 6.1 Introduction . . . 97
6.2.1 The PAROC framework and software platform . . . 100
6.3 The tank example . . . 109
6.3.1 ‘High Fidelity’ Dynamic Modeling . . . 109
6.3.2 Model Approximation . . . 110
6.3.3 Design of the Multi-parametric Model Predictive Controller . . . 110
6.3.4 Closed-Loop Validation . . . 111
6.3.5 Dynamic Optimization . . . 111
6.4 The CSTR example . . . 113
6.4.1 ‘High Fidelity’ Dynamic Modeling . . . 113
6.4.2 Model Approximation . . . 114
6.4.3 Design of the Multi-parametric Model Predictive Controller . . . 115
6.4.4 Closed-Loop Validation . . . 115
6.4.5 Dynamic Optimization . . . 117
6.5 The binary distillation column example . . . 119
6.5.1 ‘High Fidelity’ Dynamic Modeling . . . 119
6.5.2 Model Approximation . . . 121
6.5.3 Design of the Multi-parametric Model Predictive Controller . . . 122
6.5.4 Closed-Loop Validation . . . 123
6.5.5 Dynamic Optimization . . . 123
6.6 The domestic cogeneration unit example . . . 125
6.6.1 ‘High Fidelity’ Dynamic Modeling . . . 126
6.6.2 Model Approximation . . . 126
6.6.3 Design of the Multi-parametric Model Predictive Controller . . . 128
6.6.4 Closed-Loop Validation . . . 129
6.6.5 Dynamic Optimization . . . 133
6.7 Computational statistics and requirements . . . 134
6.8 Concluding remarks . . . 134
7 Towards the integration of design, scheduling and control 136 7.1 A multi-parametric programming approach for the simultaneous process schedul-ing and control . . . 136
7.1.1 Introduction . . . 136
7.1.2 Simultaneous scheduling and control via the PAROC framework . . . 138
7.1.3 Combined Heat and Power (CHP) system . . . 144
7.1.4 Results . . . 146
7.2.1 Design dependent power production bounds . . . 149
7.2.2 Closed-loop validation . . . 151
7.3 Concluding remarks . . . 152
8 Conclusions and future work 156 8.1 Conclusions . . . 156
8.2 Limitations . . . 157
8.3 Future directions . . . 160
8.4 Publications resulting from this thesis . . . 162
8.4.1 Journal publications . . . 162
8.4.2 Book Chapters . . . 163
8.4.3 Refereed Conference Publications . . . 163
A Model approximation techniques within the PAROC framework 201 A.1 High Dimensional Model Representation (HDMR) . . . 201
A.2 Group method of data handling . . . 202
A.3 GMDH-HDMR . . . 203
A.4 Surrogate Modeling as a tool for explicit nonlinear model-predictive control . 204 B Model Approximation Algorithms: A user perspective within the PAROC framework 206 B.1 Introduction . . . 206
B.2 Model Approximation: An outline . . . 207
B.2.1 Data colletion . . . 207
B.2.2 Polish and present data . . . 208
B.2.3 Data filtering . . . 209
B.2.4 Choosing the model structure . . . 209
B.2.5 Model fitting . . . 213
B.2.6 Model validation and accepting the model . . . 214
C Development of the input - output water flow rate mp-MPC 215 C.1 Development of the input - output water flow rate mp-MPC . . . 215
D Unbounded and binary parameters in multi-parametric programming 218 D.1 Theoretical Background . . . 219
D.1.1 The combinatorial approach . . . 221
D.2 Unbounded multi-parametric programming . . . 221
D.2.2 The solution of unbounded mp-LP and mp-QP problems . . . 222
D.2.3 Numerical Example . . . 224
D.3 Multi-parametric programming with binary parameters . . . 224
D.3.1 The solution of problem (D.1) . . . 226
D.3.2 Numerical Example . . . 227
D.4 A generalized combinatorial algorithm . . . 228
D.4.1 Numerical examples . . . 230
D.5 Concluding remarks . . . 235
D.6 Supplementary material . . . 235
D.6.1 The parametric solution of LP and QP problems based on their active set . . . 235
D.6.2 Parametric solution for LP problems . . . 236
D.6.3 Parametric solution of QP problems . . . 236
D.6.4 The complete solution to the bilevel problem in D.4.1 . . . 236
E Nomenclature 239 E.1 Nomenclature for the CHP model . . . 239
List of Figures
2.1 A step-by-step outline of the PAROC framework. . . 10 2.2 Software interactions for the implementation of the closed-loop validation
through gO:MATLAB . . . 19 2.3 Software interactions for the implementation of the closed-loop validation
through C++ . . . 19 2.4 Graphical representation of the binary distillation column example . . . 20 2.5 Critical regions for the solution of the mp-MHE problem of the binary
distilla-tion column. ◊1 and ◊2 correspond to estimated statesx1 andx2 respectively. The rest of the parametric vector values have been fixed for plotting purposes. 23 2.6 Critical regions for the solution of the mp-MPC problem of the binary
distilla-tion column. ◊1 and ◊2 correspond to estimated statesx1 andx2 respectively. The rest of the parametric vector values have been fixed for plotting purposes. 23 2.7 Closed loop validation results. Both the mp-MHE and mp-MPC schemes
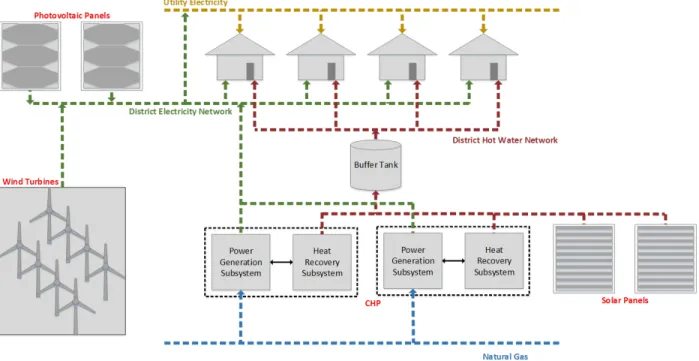
are tested against the ‘high fidelity’ model of the binary distillation column. The desired purity is preserved regardless of the input purity variations, the approximate states are estimated effectively. Note that the lack of y-legend on the approximate state graphs reflects the lack of physical meaning of the approximate states. . . 24 3.1 An example of distributed system power provision for domestic application,
featuring renewable energy resources, cogeneration unit(s) and central power provision resources . . . 29 3.2 An example of centralized system power provision for domestic application,
featuring central power provision resources . . . 29 3.3 Conceptual representation of a decentralized residential CHP series of systems
where each house is equipped with a CHP unit and interconnection between the units is allowed . . . 30
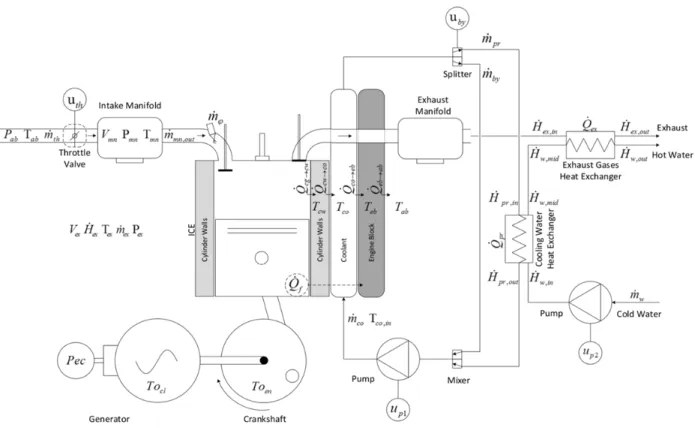
3.4 Conceptual representation of a centralized residential CHP system where a central unit covers the demand for a series of houses . . . 30 3.5 Graphical representation of a CHP system featuring an internal combustion
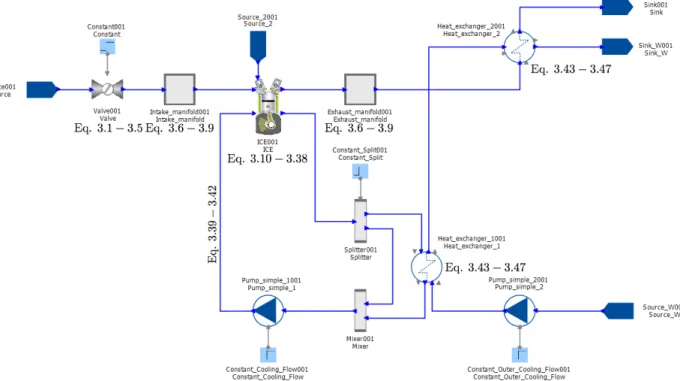
engine as the prime mover and an external heat recovery system . . . 34 3.6 Modeling outline of the CHP system of Figure 3.5. The notes beneath/next to
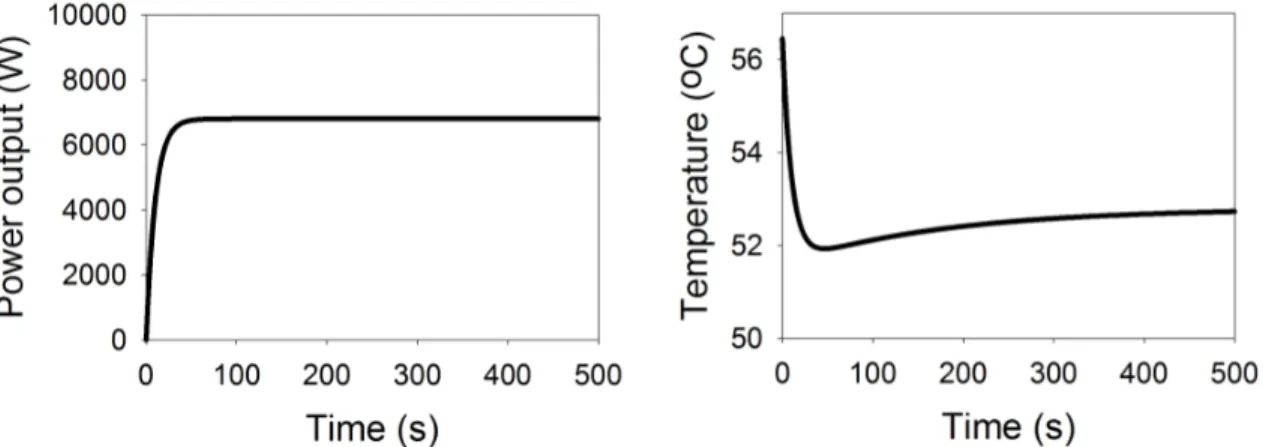
the submodels correspond to the mathematical equations that describe their operation in the following subsections . . . 35 3.7 Step response of the ‘high fidelity’ model, in open-loop, representing the time
between the start-up until steady state for a valve opening of 0.3 and a water flow of 0.01kg/s . . . 50 3.8 Power output for throttle valve position changes over 24 hours. The graph
represents a typical hourly mean power demand satisfaction (See Figure 3.9) for a series of houses . . . 51 3.9 A superposition of the power demand profile (gray rectangles) with the power
generation output (red line) and the valve position (blue line). The left y-axis corresponds to power demand and generation levels and the the right y-axis the valve opening position [0-1] . . . 52 3.10 Internal combustion engine electrical and thermal efficiency . . . 53 3.11 CHP electrical and thermal efficiency . . . 53 3.12 Engine displacement volume effect on system efficiency. The y-axis denotes
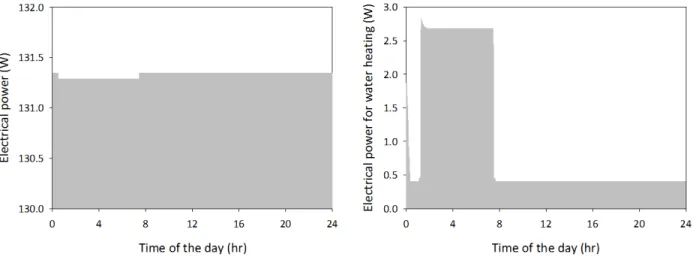
the efficiency percentage and the x-axis denotes the operating level as revolu-tions per minute (RPMs) . . . 54 3.13 Power and torque output of the CHP unit . . . 54 3.14 Electrical power demand profile . . . 56 3.15 Electrical boiler case: Optimal (cost minimization) electrical power
produc-tion profile (left) and electrical power consumpproduc-tion for the water boiler (right) 57 3.16 Natural gas boiler case: Optimal (cost minimization) electrical power
pro-duction profile (left) and electrical power consumption for the water boiler (right) . . . 58 4.1 Alternative control structures overview. Multiple subsystems are controlled
via (a) centralized, (b) decentralized and (c) distributed/coordinated control structures while (d) presents a hierarchical application of controllers [69, 317] 63 4.2 Conceptual interactions of a typical cogeneration unit . . . 64
4.3 The two modes of operation of the residential scale CHP. Mode 1 corresponds to the electricity production driven operation where the electricity output and hot water temperature is of interest. Mode 2 corresponds to the heat recovery driven operation where the water mass flowrate and temperature is of interest. 66 4.4 Decentralized model predictive control structure for the residential CHP
sys-tem corresponding to the two modes of operation presented in Figure 4.3 . . 67 4.5 The decentralized PAROC framework approach. Multiple subsystems undergo
approximation and multi-parametric programming steps while ensuring the modeling of the interactions among them are preserved. Actions within the gray area happen once and offline . . . 70 4.6 Model approximation results for the power generation subsystem . . . 72 4.7 Model approximation results for the heat recovery subsystem . . . 74 4.8 Critical region projection for the power subsystem mp-MPC. The x-axis
cor-responds to the identified state value at the initial time step of the rolling horizon and the y-axis to the real output feedback of the power generation subsystem . . . 78 4.9 Critical region projection for the heat recovery subsystem mp-MPC. The
x-axis corresponds to the optimal control action at the previous time step of the rolling horizon and the y-axis to the real output feedback of the heat recovery subsystem . . . 79 4.10 Closed-loop validation results for set-point tracking in power production driven
operation (Mode 1). (Clockwise from top left: water temperature (output set-point tracking), water flow rate (system input), throttle valve position (system input), power generation (output tracking)) . . . 81 4.11 Closed-loop validation results for set-point tracking in heat recovery driven
operation (Mode 2). (Clockwise from top left: water temperature (output set-point tracking), controlled water flow rate (input and output set-point tracking), throttle valve position (input), power generation (output and coor-dinated set-point tracking)) . . . 82 5.1 10s operation of the CHP system under PI and mp-MPC control. Mode swift
occurs at 5s. . . 95 5.2 Simulation driven operational cost sensitivity analysis for fuel and heat cost
fluctuations. The fuel cost fluctuations do not affect the cost significantly (same shade along the x-axis). On the contrary, the heat cost deviation affects the overall operational cost in an almost linear manner . . . 96
6.1 The PAROC framework for simultaneous design and control. The closed-loop validation follows an MIDO of the ‘high fidelity’ model with embedded mp-MPC. Actions within the gray area happen once and offline . . . 101 6.2 Schematic representation of the simultaneous design (MI)DO with
embed-ded mp-MPC. The (MI)DO algorithm on the ‘high fidelity’ model exchanges information with the mp-MPC . . . 107 6.3 Step and impulse response of the tank approximate model. The negative
values on the y-axis are attributed to the 0m3 initial condition and valve opening that has a negative effected on the liquid volume in the tank . . . . 110 6.4 Closed-loop validation results for liquid volume set-point tracking. Top: liquid
volume (system output) set-point tracking; Middle: corresponding proportion-ality parameter setting (optimal action); Bottom: inlet flow rate sinusoidal fluctuation (system disturbance) . . . 112 6.5 Step and impulse response of the CSTR approximate model. The negative
values on the y-axis are attributed to the zero initial conditions . . . 115 6.6 Closed-loop validation results for minimizing the reactant concentration at
the reactor outlet. Top: reactant concentration (system output) set-point tracking; 2nd: Reactor temperature (constraint); 3nd: Coolant temperature
(optimal action); 4th: inlet flow concentration sinusoidal fluctuation (system
disturbance); Bottom: inlet flow rate sinusoidal fluctuation (system disturbance)116 6.7 Tank usage optimization results for fixed Ca0,nom . . . 118
6.8 Input and output profiles for the model approximation of the binary distilla-tion column example . . . 121 6.9 Step and impulse response of the distillation column approximate model. The
negative values on the y-axis are attributed to the zero initial conditions . . 122 6.10 Closed-loop validation results for maintaining top and bottom product purity.
Top (1st and 2nd): top and bottom purity (system output) set-point
track-ing; 3rd and 4th: Reflux flow and reboiler vapor flow rate (optimal actions);
Bottom: inlet flow feed composition sinusoidal fluctuation (system disturbance)124 6.11 Step and impulse response of the cogeneration approximate models. The
6.12 Closed-loop validation results for the cogeneration unit. Heat recovery driven operation between 110s and 300s, power production driven, otherwise. Top Left: water temperature (system output) set-point tracking; Top Right: water flow rate (optimal action between 110s and 300s, system disturbance other-wise); Bottom Left: power output (system output) set-point tracking (co-ordinated set-point between 110s and 300s, user defined output otherwise); Bottom Right: valve position (optimal action) . . . 129 6.13 Closed-loop simulation for the design dependent mp-MPC for different designs 131 6.14 Design dependent mp-MPC - Output and optimal action propagation for
dif-ferent designs . . . 133 7.1 The PAROC based framework for the derivation of scheduling mpMILPs,
based on the ‘high fidelity’ model with control . . . 140 7.2 Conceptual set-point mismatch due to the approximation step . . . 141 7.3 The PAROC based framework for the derivation of surrogate QPs based on
the ‘high fidelity’ model with control . . . 142 7.4 The PAROC based framework for the derivation of control aware schedules
with mismatch treatment . . . 143 7.5 Closed loop application of the simultaneous scheduling and control framework 143 7.6 Critical regions for the control aware schedule with mismatch treatment. The
demand has been fixed for plotting purposes . . . 146 7.7 Closed-loop validation results for the simultaneous scheduling and control of
the cogeneration unit (process level). The mode of operation and set-points are determined by the scheduling problem. Heat recovery driven operation between 100s and 110s, power production driven, otherwise. Top Left: wa-ter temperature (system output) set-point tracking; Top Right: wawa-ter flow rate (optimal action between 100s and 110s, system disturbance otherwise); Bottom Left: power output (system output) set-point tracking (coordinated set-point between 100sand 110s, schedule defined output otherwise); Bottom Right: valve position (optimal action) . . . 148 7.8 Closed-loop validation results for the simultaneous scheduling and control of
the cogeneration unit (surrogate model level). The mode of operation and set-points are determined by the scheduling problem. Heat recovery driven operation between 100s and 110s, power production driven, otherwise. Top: Heat storage schedule and surrogate model; Bottom: Power generation level schedule and surrogate . . . 149
7.9 Linear correlation between the maximum electrical power production output (steady state) and the size of the prime mover on the CHP unit . . . 150 7.10 The PAROC based framework for the derivation of control aware, design
dependent schedules with mismatch treatment . . . 151 7.11 Closed-loop validation results for the simultaneous, design dependent
schedul-ing and control of the cogeneration unit (process level). The mode of opera-tion and set-points are determined by the scheduling problem. Heat recovery driven operation for 20s≠30s, 60s≠70s, 100s≠110s and 120s≠130s, power production driven, otherwise. Top Left: water temperature (system output) set-point tracking; Top Right: water flow rate (optimal action or system dis-turbance otherwise); Bottom Left: power output (system output) set-point tracking (coordinated or schedule defined set-point); Bottom Right: valve position (optimal action) (Engine size: 1500cc) . . . 152 7.12 Closed-loop validation results for the simultaneous, design dependent
schedul-ing and control of the cogeneration unit (surrogate model level). The mode of operation and set-points are determined by the scheduling problem. Heat recovery driven operation for 20s≠30s, 60s≠70s, 100s≠110sand 120s≠130s, power production driven, otherwise. Top: Heat storage schedule and surro-gate model; Bottom: Power generation level schedule and surrosurro-gate. (Engine size: 1500cc) . . . 153 7.13 Closed-loop validation results for the simultaneous, design dependent
schedul-ing and control of the cogeneration unit (process level). The mode of opera-tion and set-points are determined by the scheduling problem. Heat recovery driven operation for 20s≠30s, 40s≠50s, 60s≠70s, 80s≠90s, 100s≠110sand 120s≠130s, power production driven, otherwise. Top Left: water tempera-ture (system output) set-point tracking; Top Right: water flow rate (optimal action or system disturbance otherwise); Bottom Left: power output (sys-tem output) set-point tracking (coordinated or schedule defined set-point); Bottom Right: valve position (optimal action) (Engine size: 2500cc) . . . 154 7.14 Closed-loop validation results for the simultaneous, design dependent
schedul-ing and control of the cogeneration unit (surrogate model level). The mode of operation and set-points are determined by the scheduling problem. Heat recovery driven operation for 20s ≠30s, 40s ≠ 50s, 60s ≠70s, 80s ≠ 90s, 100s≠110s and 120s≠130s, power production driven, otherwise. Top: Heat storage schedule and surrogate model; Bottom: Power generation level sched-ule and surrogate. (Engine size: 2500cc) . . . 155
B.1 An outline of the model approximation procedure typically used within the PAROC framework. The gray boxes correspond to steps of the PAROC frame-work. The dashed lines and boxes correspond to optional actions. Rounded boxed correspond to actions performed by the user. Regular boxes correspond to actions performed by the computer. Part of the figure has been adopted from [206]. . . 208 C.1 Critical region projection for the water flow rate mp-MPC. The x-axis
cor-responds to the identified state value at the initial time step of the rolling horizon and the y-axis to the real output feedback of the water flow rate system217 D.1 A schematic representation of the combinatorial approach for the solution of
problems of type (D.1). . . 221 D.2 The feasible space of problem (D.5) in the (x,◊) domain. . . 222
D.3 A graphical visualization of the unbounded solution, as the bounds of the parameter space are increased from (a) to (b) to (c) . . . 224 D.4 A schematic representation of a situation with one binary and one continuous
variable. On the left we consider the problem where the binary variable is treated as a continuous variable [0,1] and on the right we show the equivalent binary representation. . . 226 D.5 A graphical visualization of the solution featuring binary parameters. In (a)
we show the solution where the parameter is relaxed between 0 and 1 while (b) shows the same solution when ◊2 is treated as a binary variable. . . 227 D.6 Graphical representation of the lower level mp-MILP with binary parameters.
List of Tables
2.1 Interaction of design and control - Indicative list . . . 7
2.2 Integration of scheduling and control - Inidicative list . . . 8
2.3 Model-based control - Indicative list . . . 9
2.4 Model Approximation of multi-parametric model-predictive control - Recent contributions . . . 11
2.5 Multi-parametric programming - Indicative list . . . 12
2.6 Different classes of multi-parametric programming (mp-P) problems. . . 13
2.7 Parameter values for the distillation column model . . . 21
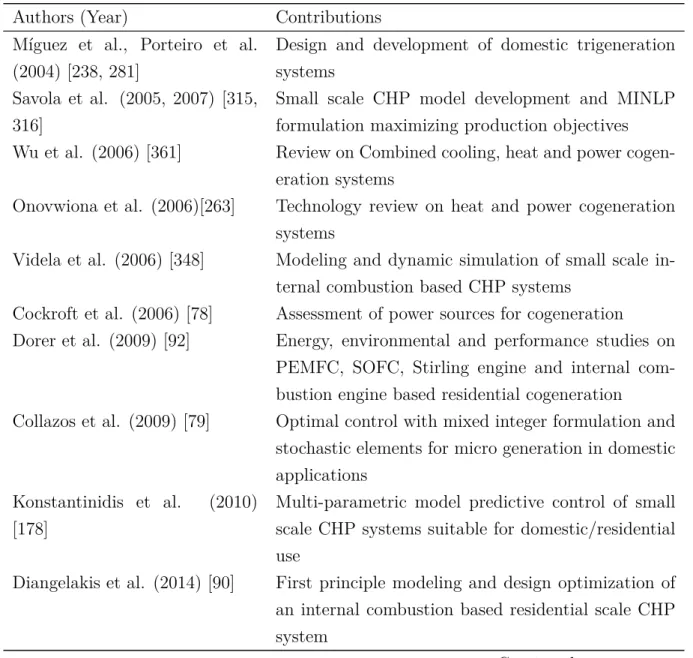
3.1 Prime mover technology for CHP systems. Information acquired from the sources in Table 3.2 . . . 31
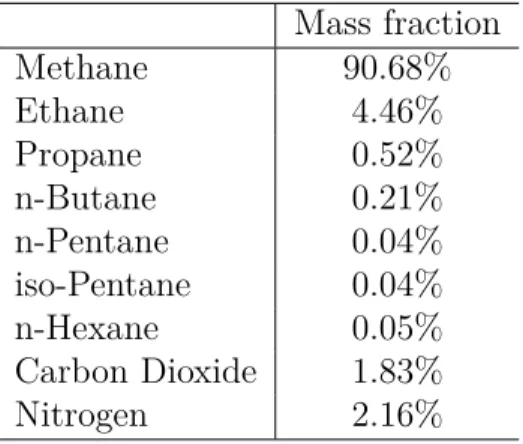
3.2 Small scale cogeneration modeling and power supply review - Indicative list . 32 3.3 Natural gas composition . . . 40
3.4 Operational cost summary. Comparison between the usage or not of a CHP in tandem with an electrical or a thermal boiler . . . 58
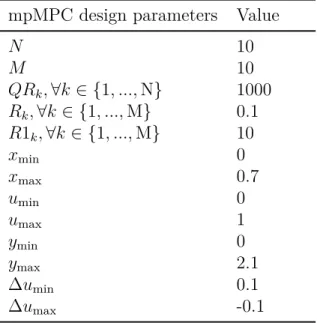
4.1 mpMPC formulation data for the power generation subsystem . . . 77
4.2 mpMPC formulation data for the heat recovery subsystem . . . 79
5.1 PI controller configuration for all subsystems for 1520cc engine displacement volume. . . 92
5.2 Relative energy and cost savings comparison among the three alternatives. The third alternative (bases case) corresponds to covering the energy demand via conventional centralized methods (grid electricity and natural gas boiler) and assumes an investment cost equal to zero . . . 92
5.3 Relative energy and cost savings comparison when alternating operating modes are considered. Scenario 1 corresponds to the case where a power driven pro-duction operation is used in times of expensive electricity rates and a heat recovery driven operation is used otherwis . . . 93
6.1 Design and control in the literature . . . 98
6.2 An indicative list of (MI)DO algorithms in literature . . . 108
6.3 Weight tuning for the mp-MPC of the tank . . . 111
6.4 Weight tuning for the mp-MPC of the CSTR . . . 116
6.5 Characteristic equations for a binary distillation column. Component i is benzene, tray number is k œ{1...N trays} unless stated otherwise. . . 120
6.6 Weight tuning for the mp-MPC of the distillation column . . . 123
6.7 Additional/Modified equations for dynamic optimization. Component i is benzene, tray number is k œ{1...N trays} unless stated otherwise. . . 125
6.8 Weight tuning for the mp-MPC of the CHP unit . . . 128
6.9 Optimal action of the power production subsystem as a function of the pa-rameters and design variable (De= 1500cc) . . . 132
6.10 Optimal action of the power production subsystem as a function of the pa-rameters and design variable (De= 4500cc) . . . 132
6.11 Computational time statistics . . . 134
7.1 Control and scheduling literature review . . . 137
C.1 mpMPC formulation data for the flo rate controller . . . 216
D.1 The solution to problem (D.9). The notation CRn corresponds to the nth critical region or Figure D.3. . . 225
D.2 The solution to problem (D.12). . . 228
D.3 Bilevel MILP-MILP solution strategies - Indicative list . . . 231
D.4 Parametric solution of the lower level mp-MILP with binary parameters. . . 233
D.5 Reduced parametric solution of the lower level mp-MILP with binary param-eters. . . 233
D.6 Solution of the bilevel MILP-MILP at every linear critical region. . . 237
D.7 Solution of the bilevel MILP-MILP at every non-linear critical region. . . 237
E.1 Nomenclature . . . 239
Chapter 1
Introduction
Portions of this chapter have been submitted for publication in:
• Pistikopoulos, E.N.; Diangelakis, N.A. (2015) Towards the integration of process
de-sign, control and scheduling: Are we getting closer? Computers & Chemical Engineer-ing, 91, 85-92
1.1 Introduction and Overview
Designing economically profitable plants and improving their operational performance has been a core research field in Process Systems Engineering. The need to optimise the per-formance of a plant includes (i) long-term decisions, (ii) mid-term decisions and (iii) short-term decisions as well as (iv) their interactions. Therefore, a variety of computational tools has been developed for advanced model development (e.g. ASPEN Plus•R, gPROMS•R), – including global sensitivity analysis, parameter estimation, and mixed-integer dynamic optimization capabilities – as well as algorithms for operational scheduling procedures and advanced control methodologies.
It is generally accepted that the decisions regarding the plant design affect its operation in a most determinative manner, since they are the less likely to change while a possible change usually requires not only a considerable investment but also the permanent cease of operation; an action that affects production profit. Operational scheduling optimizes the plant performance in the mid-term while taking into account uncertainty that originates from raw material shortages, fluctuation in pricing, demand changes, equipment failure and the like. Most commonly, the operational scheduling optimization procedures are based on the assumption that the design of the plant is given and remains fixed for the entire operational horizon and that the regulatory and supervisory control of the system work
flawlessly. The control strategies of a process constitute the short-term decisions in terms of operation. A variety of procedures are implemented with regulatory (P, PI, PID) control and model predictive control to be the most notable. The main burden of the controller is to reject measured and unmeasured disturbances while trying to maintain certain operation set-points imposed by the mid-term operational optimization. Table 2.3 presents a list of the most notable contributions on model predictive control.
The focus of the operational performance optimization has shifted from addressing the design, scheduling and control aspects individually into a combined, integrated approach. The common factor in these approaches is the effect of short-term decision-making into mid-or long-term decisions. Therefmid-ore, numerous wmid-orks have appeared in the literature through-out the past years regarding (i) the interactions of design and control and (ii) the integrated approach to scheduling and control. An indicative list of the different techniques employed to target the design and control problem is presented in Tables 2.1. Superstructures, MIDO formulations and combinations of online optimization techniques with embedded model pre-dictive control are worth noting.
On the other hand, recent contributions (from 2002 onwards) have opened the road to the integration of operational mid-term scheduling and control via a variety of methods. Among them, the MIDO approaches as well as the state-space scheduling problem representation with integrated online or offline model predictive control strategies are the most notable. Table 2.2 indicates the major contributions.
The rest of this Chapter introduces the overall design, scheduling and control optimization problem and sets the objectives of this thesis.
1.2 Towards the integration of design and operational
optimization - The problem
The overall problem of integrating design and operational optimization can be formulated as in Equation 1.1.
min uc,T,ySP,Y,De J = ⁄ · 0 P(x, y, y SP, u c, Y, d, De)dt s.t. d dtx=f(x, uc, Y, d, De)
ymin Æy=g(x, uc, Y, d, De)Æymax
uminc Æuc =h(x, y, ySP, Y, d, De)Æumaxc
ycSP,min ÆySP =m(x, y, uc, Y, d, De)ÆycSP,max
Y œ{0,1}
[xT
min, dTmin]T Æ[xT, dT]T Æ[xTmax, dTmax]T Demin ÆDe ÆDemax xœRn uc œRm y œRo ySP œRo d œRp De œRq (1.1)
Within this formulation, x are the states, uc are the control derived variables, y are the
outputs, d is the uncertainty, ySP are the scheduling derived set-points, Y are the binary
decision variables and De are the design variables. All the aforementioned variables except the design are time dependent. f and g define together the (ordinary or partial) differential algebraic equations ((O/P)DAE) that form the process model. We will refer to such for-mulations as the ‘high fidelity’ model. h is used to denote the dependency of the optimal control action on the (i) state of operation of the system (via x and y), (ii) the operational set-point, (iii) the binary decisions that can denote different control/operational schemes or binary design variables, (iv) the presence of disturbance and (v) the design of the process at hand. Similarly, the optimal set-point dependence on the operational and design character-istics of the process are denoted via m. The solution to this problem, given a disturbance scenario, should be able to provide a process design and a process operational strategy that will guarantee:
1. optimal reference/set-point tracking at the control level (i.e. provision of optimal con-trol actions),
for control and control schemes) and
3. optimal process design (including but not limited to equipment sizing, discrete design decisions, control structure, etc.).
This general formulation typically represents a large scale, non-linear, non-convex, mixed-integer dynamic optimization problem. Furthermore, it requires the solution of several op-timization problems at different levels to guarantee points 1-3, i.e. the design optimization must include optimal control and scheduling decisions each of which might require several optimization subproblems to be solved1.
Even when considering small ‘high fidelity’ models, it is clear that the solution of such problems is not straight forward. While significant progress has been achieved over the years in integrating design with control and control with scheduling, it is fair to say that at the moment there is not a generally accepted methodology and/or ‘protocol’ for the integration of all three aspects. Thereof the objectives of this thesis are presented.
1.3 Objectives and outline of this thesis
In order to tackle the problem presented in Equation 1.1 a multi-step approach is formu-lated and followed. The first objective is the formulation of a framework and prototype software platform that enables the user/researcher to derive a variety of receding horizon policies based on a ‘high fidelity’ model. The characteristics of this framework should include the development of a model of arbitrary complexity upon which the model based receding horizon policies can be verified via a closed-loop validation. Furthermore, it is of great im-portance that the optimal receding horizon policies are explicit in nature so that (i) a map of optimal solutions can be derived in the form of critical regions, (ii) the explicit actions can be incorporated into more complex formulations and (iii) their validity can be guaranteed numerically via substitution.
The second major objective of the thesis is the development of a ‘high fidelity’ model of a process of high engineering relevance in order to showcase the application of the afore-mentioned framework and prototype software platform. The development of a residential scale cogeneration of heat and power system (CHP) is chosen as the ideal candidate since it touches upon the issue of decentralized power generation and usage, an aspect that has lately received great attention within the realm of efficient power production. Furthermore, the ability of the CHP system to produce two usable forms of power, namely usable heat and electrical power, is sufficient to provide an insight on all aspects of Equation 1.1.
The CHP system should therefore become the basis for the development of advanced optimization and model based control and scheduling studies, based on the newly developed framework and prototype software platform. The interactions of the two need to be discussed and an efficient procedure to capture and utilize those interactions to be derived.
The introduction of the design dependency in addition to the explicit solution of the optimal scheduling and optimal control problems can then provide a receding horizon based, explicit representation of functionsh andm of Equation 1.1 thus providing a decomposition approach to the overall design and operational optimization problem.
The rest of the thesis is organized as follows. The PAROC framework and prototype soft-ware system is presented in Chapter 2 and applied on a simple example of binary distillation. Chapter 3 focuses on the modeling and design optimization of a residential cogeneration unit. As a first approach, the control of this system is determined prior to the design optimiza-tion. The operational characteristics and the derivation of an advanced control scheme for the CHP is the subject of Chapter 4. A simultaneous approach to design and classical con-trol optimization of the CHP is presented in Chapter 5, followed by the application of an advanced control scheme. Chapter 6 presents a multi-parametric approach to decompose the simultaneous design and control problem and showcases this approach on a tank, a CSTR, a binary distillation column and the CHP examples. The final Chapter of the thesis is divided into two parts. The first part investigates the interactions between a scheduling formulation for the CHP system and its control scheme. The second part of the final Chapter attempts to combine the findings of Chapter 6 and the first half of Chapter 7 in order to formulate design dependent advanced control and scheduling actions for the CHP example.
Chapter 2
PAROC: PARametric Optimization
and Control
A framework and software platform towards unified model based advanced opti-mization
Portions of this chapter have been submitted for publication in:
• Pistikopoulos, E.N.; Diangelakis, N.A.; Oberdieck, R.; Papathanasiou, M.M.; Nascu, I;
Sun, M. PAROC - An integrated framework and software platform for the optimisation and advanced model-based control of process systems. (2015) Chemical Engineering Science, 136, 115-138
2.1 Introduction
The integration of detailed modeling, design and operational optimization, controller de-sign and scheduling planning policies have been core process systems engineering challenges. While high-fidelity modeling and dynamic simulation have been becoming standard engi-neering tools, with software systems such as ASPEN Plus•R [13] and gPROMS•R [282] becoming standard platforms, the same is not true for the integration of design, control and scheduling. It is interesting to note that despite major advances in the areas of design and control, scheduling and control and model-based advanced control, there is currently (i) no generally accepted methodology and/or ‘protocol’ for such an integration and (ii) not any commercially available software [or even in a prototype form] system to fully support such an activity. It is clear from Tables 2.1 and 2.2 that a plethora of attempts has been made to integrate design and/or operational optimization with advanced control schemes (indica-tive contributions for which are presented in Table 2.3). Different control approaches and
optimization methods and tools have contributed greatly towards this direction. Despite this fact, there has not been a coordinated approach to systematically tackle the design and control optimization problem, the operational and control optimization problem or the unification of design, operational and control optimization problem.
Table 2.1: Interaction of design and control - Indicative list
Authors Contributions
Lee et al. [194] Introduction to design and control
Narraway et al. [247] Steady state and dynamic economics Luyben and Floudas [208] Superstructure of design alt. into MINLP Mohideen et al. [241] Economically optimal design and control van Schijndel and Pistikopoulos [345] Review on process design and operability Sakizlis et al. [307] Review on design and control
Flores-Tlacuahuac and Biegler [118] MIDO transformed to MINLP W¨urth et al. [362] Dynamic optimization and NMPC
Yuan et al. [366] Review on design and control
Diangelakis et al. [89] Sequential design optimization and mp-MPC. Application on a residential cogeneration sys-tems.
Liu et al. [205] Optimal design and operation of distributed sys-tems with focus on the trade offs between model-ing acuracy and computational complexity and efficiency.
Sakizlis et al. [305] Simultaneous mp-MPC and online design opti-mization. Case studies on binary distilation col-umn and evaporator.
In this chapter, a comprehensive framework that enables the representation and solution of demanding model-based operational optimization and control problems is presented, fol-lowing an integrated procedure featuring ‘high fidelity’ modeling, approximation techniques and optimization-based strategies, including multi-parametric programming. The key as-pect of the framework is to become a common basis towards (i) the integration of design and control optimization, (ii) the integration of operational and control optimization and (ii) the grand unification of design, operational and control optimization in a consistent manner. A key advantage of the proposed framework is its ability to adapt to different classes of prob-lems, in an effortless manner through a prototype software platform PAROC (PARametric Optimisation and Control). The latter offers, among others, the great advantage of interop-erability between advanced modeling software packages (PSE’s gPROMS•R ModelBuilder), MATLAB•R-based tools for model approximation and multi-parametric model-based con-troller and state estimator design tools.
Table 2.2: Integration of scheduling and control - Inidicative list
Authors Contributions
Shobrys and White [323] Interactions of planning scheduling and control and their impact to decision making in process industry operations
Mahadevan et al. [225] Robust control for the targeting of transition times in scheduling of polymerization operation Chatzidoukas et al. [64] Impact of control structure on process operabil-ity, product quality optimization and time opti-mal grade transition
Chatzidoukas et al. [63] Integration of production scheduling and opti-mal grade transition profiles with a MIDO ap-proach
Nystrom et al. [254] Production optimization through determination of transition trajectories, operating points and manufacturing sequence
Flores-Tlacuahuac and Grossmann
[120, 121] Simulataneous cyclic scheduling and control viareformulating an MIDO problem into an MINLP Harjunkoski et al. [153] Discussion on the problems arising from the in-tegration of production scheduling and control and its implementation
Biegler and Zavala [44] Real-time optimization and control for decision making via the formulation and efficient solution of NLP
Subramanian et al. [336] Distributed MPC and Cooperative MPC to in-tegrate scheduling objectives with process oper-ation constraints
Subramanian et al. [335] MI scheduling problem formulation based on state space models
Zhuge and Ierapetritou [371] Continuous-time event-point formulation scheduling incorporating explicit constraints derived from mp-MPC to target complexity Kopanos and Pistikopoulos [183] Reactive scheduling of a state space
representa-tion based system using multi-parametric pro-gramming
Baldea and Harjunkoski [19] A comprehensive systematic review of the inte-gration of scheduling and control
You and Grossmann [365] Supply chain optimization under uncertainty via multi-period MINLP
2.2 The PAROC Framework
Table 2.3: Model-based control - Indicative list
Authors On-line/off
-line Remarks
Campo and Morari [57] on-line min worst case Œnorm
Lee and Yu [196] on-line min worst case quadratic cost, use of dy-namic programming for closed-loop Schwarm and Nikolaou
[319], Badgwell [15] on-line min nominal objective s.t. robustnessquadratic/linear constraints. Large num-ber of combinations.
Kassmann et al. [171] on-line Apply robustness constraints to steady state target calculation.
Scokaert and Mayne [266] on-line min worst case quadratic, invariant set for stability.
Lee and Cooley [195] on-line min worst case quadratic cost s.t. quadratic constraints for stability.
Mayne and Schroeder [229] off-line min settling time, use invariant set Bemporad et al. [35] off-line min worst case -Πnorm. use of
dy-namic programming, solve consecutively mp-LPs
Editor: Christofides and
El-Farra [68] on-line Recent advances in economic model pre-dictive control and economic non-linear model predictive control
2.2.1 ‘High Fidelity’ Modeling and Analysis
The first step of the PAROC framework is ‘high fidelity’ modeling and analysis. In partic-ular, the scope is to (i) develop a ‘high fidelity’ model of the process [173, 189], (ii) analyze the original problem e.g. using global sensitivity analysis [176, 179, 311] and (iii) perform parameter estimation and dynamic optimization of the developed model. Within our frame-work, the modeling software PSE’s gPROMS•R ModelBuider [282] is used, as it provides the aforementioned tools either directly or allows their implementation via gO:MATLAB, a connection tool between MATLAB•R and gPROMS•R.
2.2.2 Model Approximation
Although it is possible to use a ‘high fidelity’ model for optimal design decisions, its plexity may usually render its direct use for the development of model-based strategies com-putationally expensive. Consequently, it may be necessary to simplify the representation of the model while compromising its accuracy. In PAROC this is addressed by the following two approaches:
Figure 2.1: A step-by-step outline of the PAROC framework.
System Identification: A series of simulations of the ‘high fidelity’ model for different initial states is used to construct a meaningful linear state-space model of the process using statistical methods. One of the most widely applied tools within this area is the System Identification Toolbox from MATLAB•R.
Model-Reduction Techniques: While system identification relies on the user in terms of interpretation of the data and processing of the results, model-reduction techniques somewhat “automate” the reduction process based on formal techniques (see Table 2.4 for recent contributions).
2.2.3 Multi-parametric Programming
After the model approximation step a state-space model is obtained which is used for the development of receding horizon policies. The calculation of such policies, e.g. in the form
Table 2.4: Model Approximation of multi-parametric model-predictive control - Recent con-tributions
Reference Key contribution
Narciso and Pistikopoulos
[246] Combination of linear model reduction and linear multi-parametric model-predictive control (mp-MPC) Rivottiet al. [296] A model order reduction via empirical gramians [149] iscombined with a mp-MPC algorithm Lambertet al. [193] Using Monte-Carlo integrations,resentations are created N step ahead affine
rep-of control laws or scheduling policies, traditionally requires the online solution rep-of an opti-mization problem, which might be computationally infeasible [276]. Therefore, the PAROC framework employs multi-parametric programming, where the optimization problem is solved offline as a function of a set of parameters. In addition, depending on the cost function and the characteristic of the system considered, the complexity of the optimization problem changes considerably. A review on key development in multi-parametric programming is given in Table 2.5, while Table 2.6 lists the resulting multi-parametric programming prob-lems for the most common cost functions (1/Œ-norm, 2 norm) and system characteristics (continuous and hybrid systems). Thus, PAROC relies on efficient algorithms and software tools for the solution of these different classes of multi-parametric programming problems.
2.2.4 Multi-parametric Moving Horizon Policies
While multi-parametric programming has been applied in a variety of areas, a key application lies in the offline calculation of moving horizon policies such as control laws and scheduling policies. The underlying idea is to consider the states of the system as parameters, and thus solve the optimization problem over a range of admissible states.
Remark 1. In addition, measured disturbances, if present, are also considered as parameters as well as state-space and model mismatch and the output set-point.
Table 2.5: Multi-parametric programming - Indicative list
mp-P Authors Theoretical development
mp-LP Gal and Nedoma [133]; Gal
[132] Linear objective and constraints: extension ofsimplex algorithm - basis exchange. Bemporad et al. [32]; Dua
et al. [98] Solve Linear Program (LP) and use sensitivityanalysis to derive expressions. Use inactive in-equalities and Lagrangian multipliers to define regions. Degenerate solutions are avoided. mp-NLP Dua et al. [97]; Dua et al.
[99] Non-convex optimization. Generate convexoverestimator and underestimator. Linearisa-tion of convex funcLinearisa-tions. mp-NLP on the func-tions. Employ a spatial branch-and-bound to obtain solution.
Dua et al. [98] Quadratic objective and linear constraints (mp-QP). Uses sensitivity analysis from Fi-acco and Kyparisis [111] to obtain the exact expressions under convexity assumptions. Zafiriou [367]) Quadratic programs. Obtain solutions for
dif-ferent sets of active constraints. Fiaccoi and Ishizuka [112];
Fiacco and Kyparisis [110] Convex problem. Sensitivity analysis aroundoptimal point. Linearization to obtain expres-sions.
Benson [38] Non-convex problem. Convex over- and un-derestimators.
In general, the following optimization problem is considered VNú(x0) = min UœU J(U, X) = min UœU ÎxNÎ p P + Nq≠1 k=0 ÎxkÎ p S+ÎukÎpR s.t. xk+1 =Axk+Buk+Cdk yk=Dxk+Euk+e h(uk, xk, yk)Æ0 xk+N œXT, (2.1)
where u, x and y are the moving horizon policies, states and outputs of the considered system,U = [u0, ..., uN≠1],ηÎp is thep-norm andP,Sand Rare the corresponding weights.
In addition, x0 are the initial states and the setXT is the terminal set that, if well-defined,
ensures stability [289].
Table 2.6: Different classes of multi-parametric programming (mp-P) problems. Cost function
System class mp-P Problem formulation Key references
1/Œ-norm Cont. system mp-LP z(◊) = min x (H◊+c) T x s.t. AxÆb+F◊ xœRn [33, 48, 133, 175] 2-norm Cont. system mp-QP z(◊) = min x (Qx+H◊+c) T x s.t. AxÆb+F◊ xœRn [34, 98, 107, 228, 332, 342] 1/Œ-norm Hybrid sys-tem mp-MILP z(◊) = min x (H◊+c) T Ê s.t. Ax+EyÆb+F◊ xœRn, yœ{0,1}p, Ê =ËxT yTÈT [1, 96, 201, 257, 294, 359] 2-norm Hybrid sys-tem mp-MIQP z(◊) = min x (QÊ+H◊+c) T Ê s.t. Ax+EyÆb+F◊ xœRn, yœ{0,1}p, Ê =ËxT yTÈT [7, 14, 98, 152, 257]
*: Note that ◊ œ ={◊ œRq|◊min
l Æ◊l Æ◊maxl , l = 1, ..., q} for all cases.
Z-transformation [34], i.e.
z =u+H≠1FTx, (2.2)
where H is the Hessian and F is the bilinear term between u and x.
While problem (2.1) describes the general case of moving horizon policies, the remaining part of the section will focus predominately on multi-parametric model-predictive control (mp-MPC). This is due to the extensive number of contributions and advances that have been made in this field.
Current state
Nominal mp-MPC: For the case of nominal mp-MPC problems, numerous publications have appeared (see [34, 275, 276] and references therein). Although from a theoretical aspect little advances have been made, nominal mp-MPC has been applied in a variety of fields such as electric drives [227], type 1 diabetes [94] and miniature helicopters [107].
control of systems that are described by both linear as well as logical dynamics [31, 154]. While different algorithms are available to solve hybrid mp-MPC problems [14, 48, 98, 257], their applicability is still limited due to the high computational burden associated with the solution of multi-parametric mixed-integer programming (mp-MIP) problems.
Robust mp-MPC: Robustness describes the immunity of a system against perturbations [36]. In mp-MPC, efforts have been made to develop a multi-parametric model-based controller that guarantees performance while satisfying the constraints, termed robust mp-MPC. While early approaches focused on (i) additive disturbances [6, 259, 286, 306], (ii) model uncertainties [35, 279], (iii) Min-max robust mp-MPC [6, 35, 81, 172] and (iv) linear input/output models [82, 259], recent advances point towards a more general approach for robust mp-MPC [188, 279]. The key idea is thereby (i) a dynamic programming reformulation of the original problem, (ii) the formulation of the robust counter-part and (iii) the solution of the resulting mp-P problem.
Recent developments
Integration of scheduling and control: Similarly to MPC, multi-parametric program-ming approaches for scheduling have been presented in the past [202, 203, 299, 300]. However, the recently developed representation of scheduling problems in a state-space model [335] has allowed for the applicability of the concepts of mp-MPC in schedul-ing [183]. This has led to the idea of integration of schedulschedul-ing and control within a multi-parametric framework [371]. In addition, this has also enabled the optimization of design aspects of the systems [89].
Development of mp-MPC for periodic systems: Applying MPC to periodic systems is a major challenge due to the presence of numerical computation and robustness issues [174]. In the realm of mp-MPC, recent studies on pressure-swing adsorption [173, 174] have shown the applicability of mp-MPC to such systems, however a comprehensive theory for general periodic systems also involving strong nonlinearities is still lacking.
Use of mp-MPC in biomedical applications: While mp-MPC has found applications within biomedical sciences [94], the general complexity of biological and biomedical systems make a model-based optimization approach rather challenging. Applications of PAROC to such systems include type-1 diabetes [368], leukemia [131] and anesthesia [60].
Future outlook
Development of mp-MPC based on mp-DO and NCO-tracking: Multiparametric dy-namic optimization and NCO-tracking are the most promising approaches that can reduce the computational burden of on-line optimization and real-time control. Multi-parametric DO obtains the control action as an explicit time dependent function of measurable parameters [310], while in NCO-tracking, optimality is achieved by track-ing the Necessary Conditions of Optimality [47, 129, 169, 337]. The latter converts an optimal control problem into a feedback tracking problem. This research direction aims to incorporate the multi-parametric approach into the NCO-tracking method. Its main objectives are the development of general theory and tailored algorithms to treat NCO-tracking as a multi-parametric optimization problem in order to generate critical regions corresponding to different solution structures. The aforementioned structures are used as tracking policies for online feedback control.
Robust hybrid mp-MPC: While several publications have tackled the problem of robust hybrid MPC (see [56, 235] and references therein), the topic of robust hybrid mp-MPC has so far received limited attention, as only robust multi-parametric proactive scheduling has been discussed [360]. The main reasons for this are (i) the conceptual difficulty in approaching robust hybrid control, (ii) the increased computational burden when solving the control problem in a multi-parametric fashion and (iii) the occurrence of parameter dependence in the constraint matrix, a widely undescribed topic within multi-parametric programming.
2.2.5 Multi-parametric Moving Horizon Estimation
Moving horizon estimation is an estimation method based on optimization that considers a limited amount of past data. One of the main advantages of moving horizon estimation is the possibility to incorporate system knowledge as constraints in the estimation. In MHE the system states and disturbances are derived by solving the following optimization problem [230, 289, 339]: min ˆ xT≠N/T,WˆT ---xˆT≠N/T ≠xT≠N/T ---2 PT≠≠1N/T≠1≠ ---YTT≠≠N1 ≠OxˆT≠N/T ≠cbUTT≠≠N2 ---2P ≠1 + Tq≠1 k=T≠N||wˆk||Q ≠1 k +||ˆvk||R≠ 1 k s.t. xˆk+1 =Aˆxk+Buk+Gwˆk yk=Cxˆk+ ˆvk ˆ xk œX,wˆk œ ,vˆkœV. (2.3)
where T is the current time, Qk º 0, Rk º 0, PT≠N/T≠1 º 0 are the covariances of wk,
vk, xT≠N assumed to be symmetric, N is the horizon length of the MHE, YTT≠≠N1 is a vector
containing the pastN+1 measurements andUTT≠≠N1 is a vector containing the pastN inputs. x,v andwdenote the variables of the system and ˆx, ˆv, and ˆwdenote the estimated variables of the system and ˆxT /T≠N and ˆWT =WTT≠≠N1 denote the decision variable of the optimization
problem, the estimated state variable and the noise, respectively. In mp-MHE, the matrices Qk,Rk and PT≠N/T≠1 are constant. In particular PT≠N/T≠1 =Pss which corresponds to the
steady-state Kalman covariance matrix.
To obtain an mp-MHE formulation, the problem in eq. (2.3) is reformulated as a multi-parametric programming problem:
min ˆ xT≠N/T,WˆTT≠≠N/T1 1 2 Ë ˆ xT≠N/TT,WˆTT≠≠N/T1 È H S UxˆT≠N/T ˆ WT≠1 T≠N/T T V+◊.f. S UxˆT≠N/T ˆ WT≠1 T≠N/T T V s.t. K. S UxˆT≠N/T ˆ WTT≠≠N/T1 T VÆk. (2.4)
The parameters of the multi-parametric programming problem (2.4) are the past and current measurements and inputs and the initial guess for the estimated states.
Current state
Unconstrained MHE: There are a few necessary steps that lead to incorporating the con-strained MHE into robust MPC. The estimation error at the beginning of the horizon and at the current time have to be derived and the bounding set of the estimation error has to be obtained. The unconstrained moving horizon estimator is equivalent to the Kalman filter [114, 230], the estimation error and the bounding sets they generate should be equivalent so the Kalman filter can be used for comparison.
Constrained MHE: In order to formulate and solve the constrained moving horizon esti-mator with multi-parametric programming, the optimization problem is reformulated into the standard multi-parametric quadratic form. Previous work has been performed on reformulating the MHE with the filtered arrival cost [83] and with the smoothed update of the arrival cost [349].
Recent developments
MHE with smoothed arrival cost: The formulation of the MHE with the smoothed ar-rival cost is still an open issue in literature. The optimization problem is reformulated
into the standard multi-parametric quadratic form. The smoothed update of the ar-rival cost involves less parameters in the multi-parametric formulation of the MHE and hence it requires less computational effort to solve the mp-MHE than the equivalent estimation problem that utilizes the filtered arrival cost [350].
Simultaneous mp-MHE and mp-MPC: The implementation of explicit/multi-parametric MPC, and in general, MPC, is based on the assumption that the state values are read-ily available from the system measurements and also that the measurable output is free of noise influence. However, in reality, the measured output may be noisy and the system measurements do not offer this information directly - instead the state infor-mation needs to be inferred from the available output measurements by using a state estimator which obtains an estimate ˆxof the real state x. The framework uses the con-strained MHE that gives improved estimation results compared to the unconcon-strained estimators. The estimation error remains inside the calculated error set and hence the MPC guarantees to satisfy the constraints [191, 351].
Simultaneous mp-MHE and mp-MPC for biomedical applications: Biomedical sys-tems are complex syssys-tems with a high degree of nonlinearity. Estimation techniques play an important role in such processes since some of the parameters and the states of the systems cannot always be measured directly from the system outputs. In most of the biomedical applications, the optimal policies rely on patient-dependent data which might be unavailable or computationally impossible to retrieve in a reasonable time frame. This makes simultaneous mp-MHE and mp-MPC an important ongo-ing research area that can deal with some critical issues especially on topics such as: intravenous and volatile anaesthesia, type-1 diabetes and leukemia.
Future outlook
Simultaneous mp-MHE and mp-MPC for periodic systems: Simultaneous mp-MHE and mp-MPC is an area that has been receiving more attention in the past years. The research work in this field has been acknowledged in several publications (give refer-ence). One area that represents an important research is the design of simultaneous control and estimation schemes for periodic systems. The periodic nature as well as the presence of multiple control objectives makes the control of such processes a challenging task.
mp-MHE for hybrid systems: The control of hybrid systems1 represents a demanding
challenge on its own. So far the multi-parametric moving horizon estimation has not been addressed in the context of hybrid systems. Current research will be focusing on multi-parametric MIQP algorithm and a step-by-step procedure for the derivation of offline multi-parametric hybrid controllers [98, 248, 276] and an integrated soft-ware (PAROC) for the general design, operational optimization and control of process systems.
2.2.6 Software Implementation and Closed-loop Validation
Multi-parametric Programming Software
In conjunction with the aforementioned theoretical developments, PAROC provides software solutions to key aspects of the framework (see http://parametric.tamu.edu/PAROC/). In particular, it offers tools for the formulation and solution of multi-parametric programming problems. Based on POP [258], it contains state-of-the-art algorithms which allow for an efficient solution of mp-LP, mp-QP, mp-MILP and mp-MIQP problems. Furthermore, its interconnection with gPROMS•R ModelBuilder (see below) makes the use of the PAROC framework straightforward and allows for an intuitive approach for design, operation and control problems.
The Multi-parametric Programming Problem Library
While libraries for classical optimization problem exist [124], for the case of multi-parametric optimization only single problems have been reported. Therefore, a multi-parametric prob-lem library for the four major classes of multi-parametric programming has been developed, namely mp-LP, mp-QP, mp-MILP, mp-MIQP problems. The prototype library, which is available within POP (see http://parametric.tamu.edu/POP/), contains small as well as real-world applications and is integrated into the PAROC framework.
Integration of PAROC in gPROMS•R ModelBuilder
The developed multi-parametric moving horizon policies and estimators are validated in a closed-loop fashion against the original ‘high fidelity’ model. However, within the PAROC framework, the ‘high fidelity’ modeling and analysis is performed in gPROMS ModelBuilder•R while the model reduction as well as the formulation and solution of the multi-parametric programming problem is carried out in MATLAB•R. Thus currently, the closed-loop valida-tion of the developed controller is done in MATLAB•R using the gPROMS ModelBuilder•R
![Figure 4.1: Alternative control structures overview. Multiple subsystems are controlled via (a) centralized, (b) decentralized and (c) distributed/coordinated control structures while (d) presents a hierarchical application of controllers [69, 317]](https://thumb-us.123doks.com/thumbv2/123dok_us/10959470.2984270/83.918.112.817.104.616/alternative-centralized-decentralized-distributed-coordinated-hierarchical-application-controllers.webp)