2016 Joint International Conference on Artificial Intelligence and Computer Engineering (AICE 2016) and International Conference on Network and Communication Security (NCS 2016)
ISBN: 978-1-60595-362-5
Joint Control of the Upper Limb Exoskeleton Based on Fuzzy-PD
Ke-Zhong CHEN
1,a,*, Qiu-Zhi SONG
1,b, Xiao-Guang WANG
1,c, Xin WANG
1,d1Beijing Institute of Technology, Beijing, China
a[email protected],b[email protected],c[email protected],
*Corresponding author
Keywords: Upper Limb Exoskeleton, Joint Control, Hydraulic System, Fuzzy-PD Controller, Simulation.
Abstract. In order to achieve a good servo control effect of the upper limb exoskeleton, Fuzzy-PD controller is applied to the control system. Through the analysis of the hydraulic system, the mathematical model of electro-hydraulic servo valve and hydraulic cylinder are been established. Then the principle of fuzzy PD controller is been introduced. The linguistic variables, the membership functions and the fuzzy control rules are also been determined. Finally the MATLAB is used to simulate the upper limb exoskeleton. The result of the simulation shows that Fuzzy-PD controller has a better effect compared to the PID controller.
Introduction
With the development of technology, especially after the 21st century, exoskeleton has a very good application in the field of military and civilian. Generally speaking, exoskeleton is a kind of wearable man-machine integration equipment which can assist the movement of people in accordance with the requirement[1]. Exoskeleton robot is divided into the upper limb exoskeleton, the lower limb exoskeleton and the whole body exoskeleton. The servo control technology of the upper limb exoskeleton is always a hot issue all over the world. The purpose of this study is that people can easily lift heavy objects under the premise of a good human-machine cooperative movement. The upper limb exoskeleton can reduce the body's power consumption, and enhance the human motor function[2].
In order to achieve a good servo control of the upper limb exoskeleton, a common method is PID control. In terms of the upper limb exoskeleton, there is a high requirement in steady state time and the steady-state error is not very important. So the part of integral is removed and the PD controller is applied in this system, through which the steady state time is reduced. But there will be two distinct problems if only the PD controller is applied in the system: On the one hand, although the PD controller is simple and easy to be realize in reality, but the parameters of PD controller are constant in the whole process, so it can’t adapt to the changes in the state of upper limb exoskeleton. On the other hand, in order to get an ideal effect of servo control, a precise mathematical model of the whole system must be established. The mechanical structure and the hydraulic system have a certain complexity and the upper limb exoskeleton is always motive in the whole process, so this is a nonlinear and time-varying system. In this situation, it is difficult to establish a precise mathematical model. Considering the two issues, Fuzzy-PD controller is designed, which is composed of fuzzy control and PD control. Fuzzy control is an intelligent control algorithm and it can make up for shortcomings of PD control. MATLAB is used to simulate. In order to highlight the advantages of fuzzy PID controller, PD controller is also be designed.
Establishment of the Upper Limb Exoskeleton Model
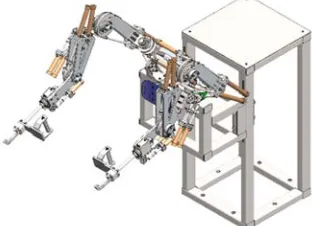
A six-axis force sensor collects generalized force and torque as input to Fuzzy-PD controller. Through a Jacobian matrix, generalized torque is transformed to a joint torque. Fuzzy-PD controller will control the output torque to reach the expected joint torque. Hydraulic pressure sensor will feedback corresponding pressure, the whole system is a closed-loop feedback system. The control of the upper limb exoskeleton is based on the control of its joint. In order to realize the joint control, the mathematical model of electro-hydraulic servo valve and hydraulic cylinder should be established.
[image:2.612.227.383.164.277.2]
Figure 1. Mechanical structure of the upper limb exoskeleton.
Mathematical Model of Electro-hydraulic Servo Valve
Electro-hydraulic servo valve is a kind of high-performance control component which can transform the tiny electrical signals into hydraulic signal. Because of its accurate control precision and fast response, it is widely used. The QDY-II electro-hydraulic servo valve has been used in this paper, whose transfer function is given as follows:
. (1)
K . (2)
The frequency response curve of the QDY-II electro-hydraulic servo valve is shown in Fig. 2.
When the amplitude is -3dB, the frequency is 150Hz. is the natural frequency; is the
output flow; is the input current; is the gain of servo valve; is the damping ratio;
is the rated load flow; is the rated load current.
[image:2.612.206.407.543.682.2]Mathematical Model of Hydraulic Cylinder
Hydraulic Cylinder is the power unit of an electro-hydraulic servo system. The transfer function of hydraulic cylinder is given as follows:
(3)
A D d (4)
ω (5)
d d 2δ (6)
is the effective working area; is the natural frequency; is the damping ratio; is
the volume elastic; is the equivalent volume; is the weight of object.
Design of Fuzzy-PD Controller Structure of Fuzzy-PD Controller
[image:3.612.90.179.128.266.2]A two-dimensional fuzzy controller is used in this paper, whose system structure is more complex than a one-dimensional fuzzy controller and is simpler than a three-dimensional fuzzy controller. So the control accuracy of a two-dimensional fuzzy controller is higher than a one-dimensional fuzzy controller, at the same time it will take less time to calculate compared to a three-dimensional fuzzy controller[3]. Feedback control of two-dimensional Fuzzy-PD is shown in Fig. 3.
The error e and its rate ec of difference between torque and nominal torque are used as input
variable of Fuzzy-PD controller, output variable is the value of and .
PD
controller Exoskeleton Fuzzy
control
d/dt
Kp Kd
e
ec
R + y
‐
Figure 3. Block Diagram of Fuzzy-PD controller.
Determination of Fuzzy Linguistic Variables and Membership Function
The torque error e will change between -3N/m and 3N/m.
The fuzzy sets of e, ec, and are defined as {NB, NM, NS, ZO, PS, PM, PB}.
Universes of them are defined as [-3, -2, -1, 0, 1, 2, 3]. If fuzzy linguistic variables are not in the universe. The quantization factor can be used to solve this problem.
[image:3.612.159.457.477.573.2]Figure 4. Membership Function.
Determination of Fuzzy Control Rules
The fuzzy control rules can be expressed by conditional statement of “if…then…”, which represent decision result derived from many change premises. The rules of choosing the control variable are given as follows:
When the upper limb exoskeleton starts to move, the value of e is big. In order to speed up the
response, a big value of should be adopted. At the same time, a medium value of should
be adopted to avoid the saturation of integral.
When the upper limb exoskeleton is in metaphase of the movement, the error e and its rate ec
reduce gradually. In order to get a smaller overshoot, a small value of should be adopted.
Meanwhile, a medium value of should be adopted for a rapid response of system.
When the upper limb exoskeleton move smoothly, there is a small value of error e. In order to get
a good stability, a big value of should be adopted. Considering the oscillation and the anti-
interference, when the value of ec is small, a big should be adopted; when the value of ec is big,
a small should be adopted[5].
Based on those rules, the fuzzy control rules are defined as Table 1 and Table 2.
Table 1. Fuzzy control rules of .
Error e The rate of e(ec)
NB NM NS ZO PS PM PB
NB PB PB PM PM PS ZO ZO
NM PB PB PM PS PS ZO NS
NS PM PM PM PS ZO NS NS
ZO PM PM PS ZO NS NM NM
PS PS PS ZO NS NS NM NM
PM PS ZO NS NM NM NM NB
[image:4.612.84.515.425.571.2]PB ZO ZO NM NM NM NB NB
Table 2. Fuzzy control rules of K .
Error e The rate of e(ec)
NB NM NS ZO PS PM PB
NB PS NS NB NB NB NM PS
NM PS NS NB NM NM NS ZO
NS ZO NS NM NM NS NS ZO
ZO ZO NS NS NS NS NS ZO
PS ZO ZO ZO ZO ZO ZO ZO
PM PB NS PS PS PS PS PB
PB PB PM PM PM PS PS PB
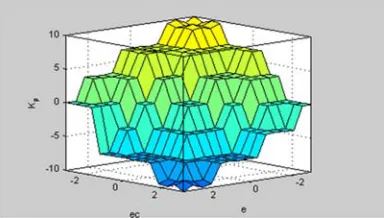
Method of “Mamdani” is used for fuzzy logic control, and “max-min” is used for fuzzy reasoning, bisector of area is used for defuzzification method. Output surface of Fuzzy-PD controller is shown in Fig. 5.
[image:4.612.211.405.621.730.2]Simulation Analysis
Fuzzy-PD control simulation and PD control simulation is shown in Fig. 6.
[image:5.612.104.515.99.285.2]Figure 6. Simulation Model of the system.
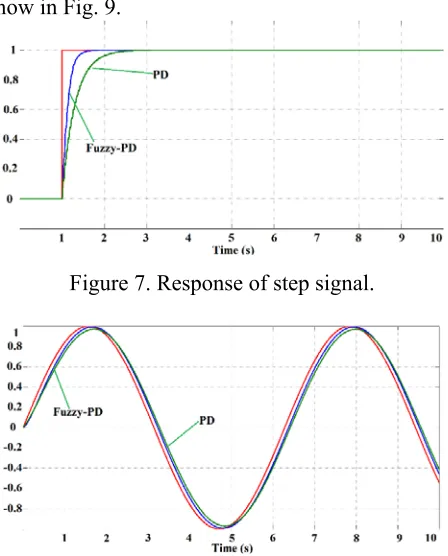
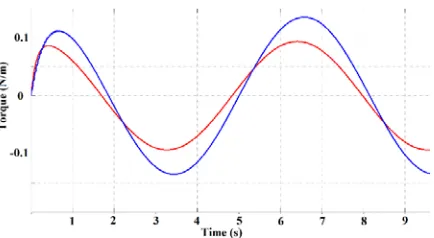
Response of step signal and sinusoidal signal are shown in Fig. 7 and Fig. 8. Torque of man-machine system is show in Fig. 9.
[image:5.612.195.419.342.620.2]Figure 7. Response of step signal.
Figure 9. Torque of man-machine system.
Fig. 7 and Fig. 8 show that steady state time of Fuzzy-PD control decreases about 30%, the reaction speed increases obviously. PD control has a small oscillation while Fuzzy-PD control has a good effect. Fig. 9 shows that torque of man-machine system of Fuzzy-PD control decreases 25%, which can reduce the burden on the body.
Conclusion
Because it is difficult to establish a precise mathematical model of the upper limb exoskeleton and it is a time-varying system, Fuzzy-PD controller is been designed to get a good servo control effect. Mathematical model of electro-hydraulic servo valve and hydraulic cylinder are been established and MATLAB is been used to simulation. The result shows that Fuzzy-PD controller has a self-tuning function which can change parameters real-time. Compared with PD controller, the steady state time of Fuzzy-PD controller decreases obviously, so it has a better control effect.
References
[1] Robert B. Robotic exoskeletons: a review of recent progress, Industrial Robot: An International Journal, 2015, 42(1): 5-10.
[2] Song, Q.Z., Development of Multi-joint Exoskeleton-assisted Robot and Its Key Technology Analysis: an Overview, Acta Armamentarii, 1000-1093(2016) 01-0172-14.
[3] Zeng, G.Q., Fuzzy Control Theory and Engineering Applications, Wu Han, 2006.
[4] Li, H.M., Vehicle Control Strategies Analysis Based on PID and Fuzzy Logic Control, Procedia Engineering, 137 (2016) 234 – 243.