2019 International Conference on Computational Modeling, Simulation and Optimization (CMSO 2019) ISBN: 978-1-60595-659-6
Research on Feature Extraction Algorithm of Palm Main Line
Based on Bottom Hat Transformation
Wei ZHOU, Hui LIU
*and Xia LIANG
College of Physics and Electronic Science, Hunan Normal University, Changsha, China *Corresponding author
Keywords: Knuckle pattern, Palm print, Bottom cap transformation, Segmentation.
Abstract. Aiming at the problem that the main line of palm is not easy to extract, and it is easy to be affected by illumination and uneven color of palm, this paper proposes a feature extraction algorithm based on base The bottom transformation. The bottom cap transform can eliminate the influence of uneven illumination and extract the main line of the palm. The collected palm image is first grayscaled and bottomed, and then binarized, the palm area is separated, the palm area is found, the palm boundary is separated by the Sobel edge detector, and the fingertip valley coordinates are determined. The palm area is divided, the knuckles and palm prints are found, and the vertical projection is used to match the palm print and the knuckle pattern. The experimental results show that the method can eliminate the influence of uneven illumination and uneven color of palm, and it has fast speed and strong anti-noise ability. It is suitable for large-scale palm database to achieve coarse screening.
Introduction
Nowadays, society has entered the information age. Many occasions need to effectively identify the true identity of individuals. Traditional personal identity identification can no longer meet the needs of society. Biometric identification technology is an effective way to replace traditional methods. At present, the main biometric technology products in the global market include fingerprint recognition, face recognition, iris recognition, hand shape recognition, voice recognition, and multi-biometric recognition [1-2]. Fingerprint recognition is the earliest, most extensive, and most mature biometric identification technology, but it also has its shortcomings: too dry, too wet, dirty fingers are not easy to identify, and fingerprint image must be pressed moderately [3]. The uniqueness, persistence and recognition accuracy of face recognition, hand recognition and voice recognition are not high [4-5]. Using the sobel operator to find the gradient of the image, the main line features of the knuckle pattern are proposed, which are greatly affected by illumination, and the precision matching by the projection matching algorithm is low[6]. The improved algorithm of palmprint and knuckle recognition based on the bottom cap transformation proposed in this paper combines the knuckle pattern and palmprint recognition technology to extract only the main lines of the knuckle and palm prints, thus increasing the recognition area and increasing the recognition area[7]. With anti-interference ability, the bottom cap transformation can also eliminate the impact of care, and the matching process is fast[8-9]. It is suitable for medium-to-high-level rough matching in a large palm database, and the most similar library is filtered to enter the next layer for fine matching.
Image Preprocessing
Palmprint Image Preprocessing
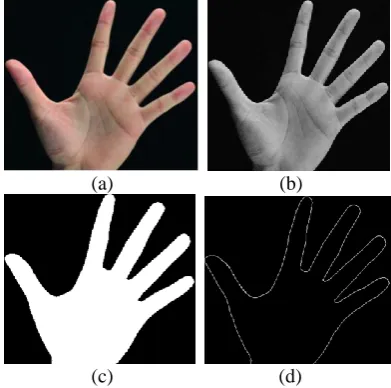
then binarized (Fig. 1(c)), and the boundary extraction uses the Sobel operator to extract the palm edge contour (Fig. 1(d)).
(a) (b)
(c) (d)
Figure 1. (a) Original image, (b) Grayscale image, (c) Binary image, (d) Palm border image.
Bottom Cap Transformation to Extract Knuckles, Palm Prints. Swelling is an operation of "extended" or "thickening" in a binary image. This particular way and degree of coarsening is controlled by a collection of structural elements, which are usually represented by a matrix of 0 and 1. Corrosion "shrinks" or "refines" objects in a binary image, as in expansion, the manner and extent of shrinkage is controlled by structural elements. Open and closed operations are based on the irreversibility of expansion and corrosion. The expressions of open and closed operations in gray morphology are consistent with the expressions of open and closed operations in binary mathematical morphology.
The same structural element is used to corrode the input image first, and then expand, which is an open operation, expressed as.
B B F B
F ( ) (1)
Use the same structural element to expand the input image first, and then etch, which is a closed operation, expressed as.
B B F B
F ( ) (2) The actual common opening operation removes the bright details smaller than the structural elements, keeping the overall gray value of the image and the large bright area unaffected, and using the closed operation to remove the dark details smaller than the structural elements. Keep the overall gray value of the image and large dark areas unaffected.
The bottom cap transformation belongs to the combined morphology operation, assuming F is the input image, B is the structural element used, and G is the output image, that is, subtracting the original image from the image obtained after the morphological closing operation. The closed operation can make only the estimation of the background left in the image; the noise smaller than the structural element can also be cleared, and the target can be extracted by subtracting the original image from the estimation of the background. The morphological bottom cap transformation is defined as follows.
F B F
[image:2.595.199.395.102.296.2]
(a) (b)
Figure 2. (a) Palm open operation image, (b) Bottom cap transform image.
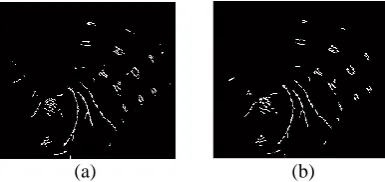
Palm Image Denoising. Gray-scale stretching is performed on the image transformed by the bottom cap (Fig. 2(b)), and then adaptive binarization processing is performed to obtain Fig. 3(a). In order to reduce noise interference, the bwareaopen algorithm is used to subtract a small connected domain from the image of Fig. 3(a), Fig. 3(b) is obtained.
(a) (b)
Figure 3. (a) Adaptive binarization processing image, (b) Denoising image.
Feature Extraction
In order to accurately match the characteristics of the palm texture, we must first separate the effective area and the palm print area of the finger from the entire palm. In this paper, the knuckles of the index finger, middle finger, ring finger, little finger, the distance between the knuckles and the palm print are extracted. Regional characteristics, thumb posture changes greatly, so this article is not considered as a feature.
Finger Image Segmentation
Determination of the Key Points of the Valley and Fingertips. A relatively robust finger-point and fingertip key point extraction technique is to solve the ray distance to the wrist reference point. The wrist reference point is defined as the first gray level found in the last line of the image matrix from left to right in Fig. 1(d). The position where the value is not zero is the reference point (Fig. 4(a)). Then track the distance between the point on the palm contour and the reference point of the wrist in a clockwise direction, and get 5 peak points and 4 valley points. 5 peaks correspond to the five-finger fingertip key points, and 4 valley values correspond to the valley. The key point, as shown in Figure 4(c), is the position of the palm image of the corresponding point is Fig. 4(b).
(a) (b) (c)
Figure 4. (a) Reference point position image, (b) Fingertip and finger valley location map, (c) Tracking contour and reference point line segment distance.
[image:3.595.192.406.69.173.2] [image:3.595.200.393.258.349.2] [image:3.595.151.444.633.720.2]point h and the point g in the clockwise direction of the palm contour in Fig. 4(b), after a point in the clockwise direction The point closest to the point b is the end point of the right edge of the little finger. Divide the Finger and Determine the Distance between the Knuckles. The least squares method is used to fit the contour of each finger edge, as shown in Fig. 5 (a),and the angle bisector of the fitted two finger edge lines is taken as the central axis of the corresponding finger,as shown in Fig. 5 (b).
(a) (b)
Figure 5. (a) Finger edge fit image, (b) Finger spindle image.
Taking the fingertip point as the origin of the Cartesian coordinate system, the main axis of each finger is taken as the abscissa, and the origin of the coordinate origin is taken as the vertical axis of the finger main axis as the vertical axis of the rectangular coordinate. The coordinate transformation of the corresponding finger is as follows:
2 / 0 cos sin sin cos 1 1 k k o k o k k k k h y y x x y x (4) Where k is the angle between the horizontal axis of the entire image and the main axis of the finger, ( k)
o k o y
x , is the coordinate of the fingertip in the image, and hk is the width of the finger, where
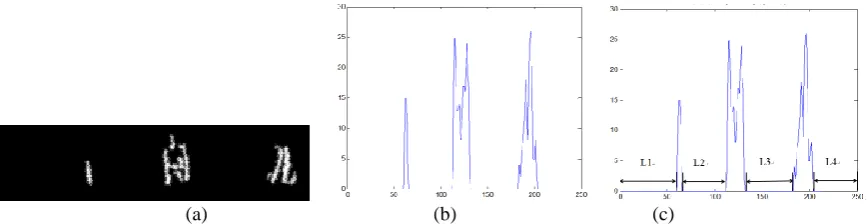
k=0, 1, 2, and 3 represent the ring finger, middle finger, index finger, and little finger, respectively. Find the farthest distance from the point on the edge line of each finger to the main axis of the finger, take the double distance from the point to the main axis as the height, and extend the length of the finger by 120% in the direction of the finger root. The algorithm uses the binarized image. Four rectangular areas are divided in the middle, and the middle finger segmentation diagram is as shown in Fig. 6(a). The image of each finger binarized is vertically projected, and the vertical projection of the middle finger is shown in Fig. 6(b). Find the longest four regions with zero values in the curve, the lengths of which are labeled L1, L2, L3, L4.
(a) (b) (c)
Figure 6. (a) Refers to the segmentation diagram, (b) Refers to the vertical projection grayscale, (c) Longest four regions with zero values in the image.
Division of the Palm Area
[image:4.595.196.399.150.236.2] [image:4.595.82.516.520.632.2]Coordinate transformation: taking f point as the coordinate origin, line L as the horizontal coordinate axis, and the coordinate transformation of the palm is realized by the following formula:
0 0 cos sin sin cos y y x x y x
(5)
Where is the angle between the X line and the horizontal axis, and (xo,yo) is the coordinate of the r point.
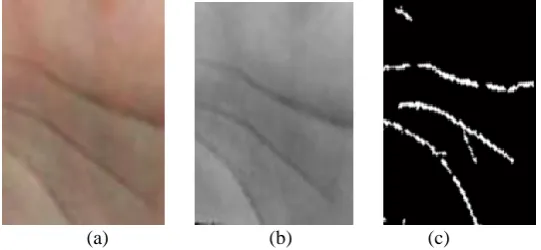
The original image (Fig. 7(a)), the grayscale image (Fig. 7(b)), and the binarized image (Fig. 7(c)) are divided.
(a) (b) (c)
Figure 7. (a) The original image, (b) The grayscale image, (c) The binarized image.
Feature Matching
Primary matching is first performed, matching based on the four maximum area length ratios at which the finger projection image value is zero. Directly calculate the maximum area length ratio between a single finger with zero value and zero value between the finger and the finger. If it matches, the program ends, and if there is no match, the lower level is matched.
The second-level matching, vertical projection matching of the phalanx and palmprint, the method is fast in calculation, the matching precision is relatively high, and the vertical projection feature vector in the vertical direction is extracted, and the matching degree is measured by the similarity between the feature vectors, similar The degree calculation is realized by the cosine function between the two vectors. The calculation formula of the two vector cosine functions is as follows:
1 0 2 1 0 2 1 0 ) ( ) , ( n i i n i i n i i i y x y x y x y x y xss
(6) Where n is the length of the vector, and n=1200 (vertical projection direction).
Experimental Results
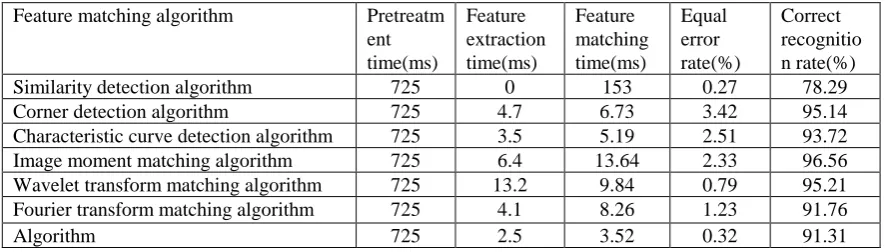
[image:5.595.163.434.206.331.2]Table 1. Comparison of parameters of different algorithms.
Feature matching algorithm Pretreatm
ent time(ms)
Feature extraction time(ms)
Feature matching time(ms)
Equal error rate(%)
Correct recognitio n rate(%)
Similarity detection algorithm 725 0 153 0.27 78.29
Corner detection algorithm 725 4.7 6.73 3.42 95.14
Characteristic curve detection algorithm 725 3.5 5.19 2.51 93.72
Image moment matching algorithm 725 6.4 13.64 2.33 96.56
Wavelet transform matching algorithm 725 13.2 9.84 0.79 95.21
Fourier transform matching algorithm 725 4.1 8.26 1.23 91.76
Algorithm 725 2.5 3.52 0.32 91.31
Conclusions and Prospects
In this paper, the feature extraction algorithm of palm main line based on bottom hat transformation is proposed. No fixed marks are required for palm acquisition, the requirements for the camera device are low, and the acquisition speed is fast. The bottom cap transformation basically eliminates the influence of uneven color of the palm, greatly reduces the noise interference, and image segmentation matching improves the speed and accuracy of image matching. The experimental results show that the proposed method has a high recognition rate and the matching process is fast and efficient. In the future, a complete, efficient and accurate identification system based on palm images will be formed by combining the characteristics of phalanx, palm print and fingerprint.
Acknowledgement
This work is supported by the National Natural Science Foundation of China (Grant No. 61827812, 61774129), Hunan Science and Technology Department Huxiang High-level Talent Gathering Project (Grant No. 2019RS1037) and Changsha Science and Technology Plan Key Projects (Grant No. kq1801035).
References
[1] Unar J, Seng W, Abbasi A, et al. A review of biometric technology along with trends and prospects[J]. Pattern Recognition, 2014, 47(8):2673-2688.
[2] Zhang Lin, Zhang Lei, Zhang David, et al. Online Finger-Knuckle-print Verification for Personal Authen-Tication [J]. Patern Recognition, 2010, 43(7):2560-2571.
[3] Toktam Zoughi, Mohammad Mehdi Homayounpour, Mahmood Deypir. Adaptive windows multiple deep residual networks for speech recognition[J]. Expert Systems with Applications, Volume 139, January 2020, 112840.
[4] B. Poorna. Genetic algorithm for fingerprint matching[J]. WSEAS Transactions on Information Science and Applications, 2006, 3(6): 1173-1178.
[5] Yang W, Sun C, Ricanek K. Sequential Row–column 2DPCA for Face Recognition[J]. Neural Computing and Applications, 2012, 21(7): 1729-1735.
[6] Saedi S, Charkari N M. Palmprint authentication based on discrete orthonormal S-Transform[J]. Applied Soft Computing, 2014, 21: 341-351.
[8] Liu M H, Yap P T. Invariantre presentation of orientation fields for fingerprint indexing[J]. Pattern Recognition, 2012, 45(7): 2532-2542.