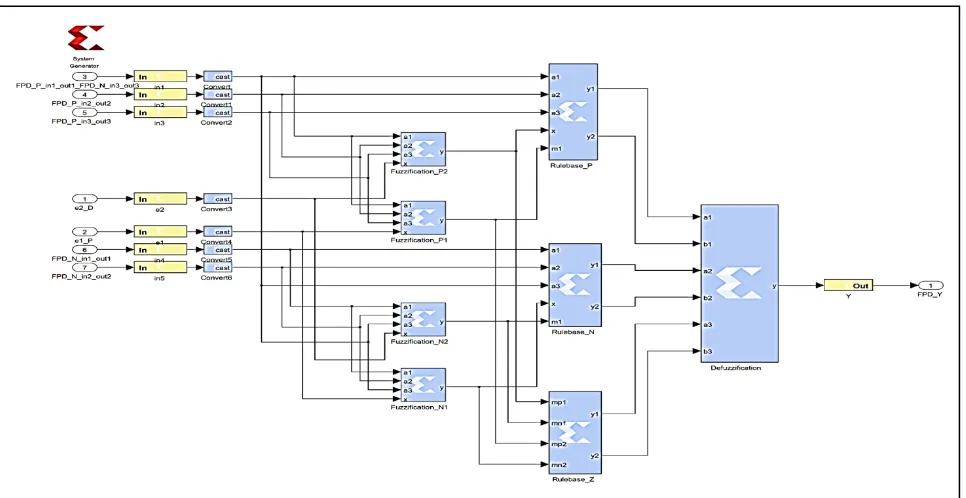
Design and Implementation of Fuzzy PID Controller for Single Link Flexible Joint Robotic System using FPGA
Full text
Figure
Related documents
This paper has focused on gait-based gender classification when data sets present high dimensionality and class imbalance. Six different approaches have been analyzed when
In table 1a and b the most important assumptions are summarized (where a and b relate to the two bases just described). The sources for these assumptions are numerous. The
star thai massage sydney thai massage fairfield sydney dvd massage cursus ecole de massage femme enceinte cheap thai massage doha massage piedmont ave oakland ca reflexologie
To further increase the frequency of delirium assessments, the delirium screening tool was standardised and a critical care progress note was implemented that included a section
Since the primary endpoint was achieved (defining the recommended dose in the trial in combination with capecitabine in patients with breast, colorectal or
Recessive deafness is usually prelingual, severe or profound, and fully penetrant, but some DFNB genes cause progressive hearing loss with delayed onset in childhood [3, 4]2.
The purpose of this commentary is to describe a framework (Modification Identification Framework) and method (Revealed Causal Mapping) for classifying modifications instructors make
Mäki-Arvela P, Holmbom B, Salmi T, Murzin DY (2007) Recent progress in synthesis of fine and specialty chemicals from wood and other biomass by heterogeneous catalytic processes..
