University of Windsor
University of Windsor
Scholarship at UWindsor
Scholarship at UWindsor
Electronic Theses and Dissertations
Theses, Dissertations, and Major Papers
1-1-2006
Iterative decoding with imperfect channel estimation for wireless
Iterative decoding with imperfect channel estimation for wireless
systems.
systems.
Yibo Zhou
University of Windsor
Follow this and additional works at: https://scholar.uwindsor.ca/etd
Recommended Citation
Recommended Citation
Zhou, Yibo, "Iterative decoding with imperfect channel estimation for wireless systems." (2006). Electronic Theses and Dissertations. 7146.
https://scholar.uwindsor.ca/etd/7146
Iterative D ecoding w ith Im perfect Channel
E stim ation for W ireless System s
by
Y i b o Z h o u
A Thesis
Subm itted to the Faculty of G raduate Studies and Research through Electrical Engineering
in P artial Fulfillment of the Requirements for the Degree of M aster of Applied Science at the
University of W indsor
1*1
Library and
Archives Canada
Published Heritage
Branch
395 W ellington Street Ottawa ON K 1A 0N 4 Canada
Bibliotheque et
Archives Canada
Direction du
Patrimoine de I'edition
395, rue W ellington Ottawa ON K 1A 0N 4 Canada
Your file Votre reference ISBN: 978-0-494-42337-0 Our file Notre reference ISBN: 978-0-494-42337-0
NOTICE:
The author has granted a non
exclusive license allowing Library
and Archives Canada to reproduce,
publish, archive, preserve, conserve,
communicate to the public by
telecommunication or on the Internet,
loan, distribute and sell theses
worldwide, for commercial or non
commercial purposes, in microform,
paper, electronic and/or any other
formats.
AVIS:
L'auteur a accorde une licence non exclusive
permettant a la Bibliotheque et Archives
Canada de reproduire, publier, archiver,
sauvegarder, conserver, transmettre au public
par telecommunication ou par Nntemet, preter,
distribuer et vendre des theses partout dans
le monde, a des fins commerciales ou autres,
sur support microforme, papier, electronique
et/ou autres formats.
The author retains copyright
ownership and moral rights in
this thesis. Neither the thesis
nor substantial extracts from it
may be printed or otherwise
reproduced without the author's
permission.
L'auteur conserve la propriete du droit d'auteur
et des droits moraux qui protege cette these.
Ni la these ni des extraits substantiels de
celle-ci ne doivent etre imprimes ou autrement
reproduits sans son autorisation.
In compliance with the Canadian
Privacy Act some supporting
forms may have been removed
from this thesis.
While these forms may be included
Conformement a la loi canadienne
sur la protection de la vie privee,
quelques formulaires secondaires
ont ete enleves de cette these.
© 2006 Y ibo Zhou
All Rights Reserved. No P a rt of this docum ent may b e reproduced, stored or otherw ise
retained in a retreival system or tra n sm itte d in any form, on any m edium by any m eans
A b s tr a c t
In th is thesis, we propose a new iterative algorithm for tu rb o decoding w ith integrated
channel estim ation for Rayleigh flat-fading channels. T h e design of th e proposed algorithm
is based on a new tu rb o decoding m etric for binary phase-shift keying (B PSK ) signaling
on fast fading Rayleigh channels w ith noisy channel estim ates. T h e algorithm consists of a
channel estim ator th a t can reduce th e error variance of th e channel estim ate iteratively by
using th e soft extrinsic inform ation o u tp u t from th e tu rb o decoder. T he extrinsic inform a
tion generated from th e tu rb o decoder has some a priori inform ation of th e tran sm itte d d a ta
sym bols which can be used to refine th e channel estim ate after each iteration of decoding.
T he refined channel estim ate is th e n fed back to th e tu rb o decoder for th e next iteration
of decoding. T he resulting iteration betw een th e channel estim ato r and th e tu rb o decoder
using th e new m etric, w ith interm ediate exchange of soft channel-sym bol inform ation, yields
very impressive results. Sim ulation results verify th a t th e proposed algorithm can o u tp e r
form conventional algorithm s significantly and even its perform ance can approach th a t of a
tu rb o decoding algorithm w ith perfect knowledge of th e channel.
In m ost existing tu rb o decoding algorithm s for fading channels, th e received d a ta sym
bols are m ultiplied by th e complex conjugate of an estim ate of th e channel gain before
tu rb o decoding w ithout any m athem atical justification. However, in th is thesis, we prove
th a t th e result of th is kind of preprocessing (or filtering) o p eration on th e received signal
A B S T R A C T
m inim um -m ean-square-error (MMSE) estim ates of th e tra n sm itte d d a ta symbols.
We also stu d y th e effect of signal-to-noise ratio (SNR) m ism atch on th e bit-error ra te
(B ER ) perform ance of tu rb o decoding algorithm s. According to th e previous results ob
tained by o ther researchers, turbo-decoding w ith th e M ax-Log-M AP decoder is independent
of SN R for Rayleigh fading channels when th e channel is assum ed to be perfectly known to
th e receiver. Using such an assum ption, th e Rayleigh fading channel may th en be viewed
as an additive w hite G aussian noise (AWGN) channel conditioned on th e fading coefficient.
Since in practical com m unication system s, th e channel inform ation is not available at th e
receiver, th e channel m ust be estim ated a t th e receiver. Because of th e low signal to noise
ratios typical of tu rb o coded system s, it is difficult to obtain perfect estim ates of th e fading
coefficients. Thus, we show th a t th e M ax-Log-M AP decoder is sensitive to SNR m ism atch
over fading channels w ith noisy channel estim ates. Also, it is shown th a t th e Max-Log-MAP
decoder is less sensitive to SNR m ism atch th a n th e M AP or Log-M AP decoder.
Finally, we propose a new SNR m ism atch m odel to exam ine th e sensitivity of tu rb o
decoding algorithm s to SNR m ism atch for system s w ith an SN R estim ator. T his m odel is
m ore practical th a n th e conventional one. U nder th is model, we still can verify th a t th e
A c k n o w le d g e m e n t
I would like to th a n k all who m ade th is work possible: my advisor Dr. B ehnam Shahrrava,
for thousands of suggestions and guidelines to m aintain overall high stan d ard s; my internal
reader Dr. Kemal Tepe and my external reader Dr. Scott Goodwin. I would also like to
th a n k my parents who have always supp o rted me w ith my g ra d u ate study. Lastly, I th a n k
my dearest girl friend Yanjie Mao, who is always by my side and has helped me to prepare
C o n ten ts
A b s tr a c t iv
A c k n o w le d g e m e n t v i
L ist o f F ig u r e s x
1 I n to d u c tio n 1
1.1 T urbo (iterative) decoding algorithm s ... 1
1.2 A new algorithm for tu rb o decoding w ith channel e s t i m a t e s ... 3
1.3 P reprocessing (fading com pensation) for tu rb o d e c o d in g ... 4
1.4 Effect of SN R m ism atch on B E R p e rfo rm a n c e ... 4
1.5 A New SNR m ism atch m o d e l ... 5
1.6 O rganization of th e t h e s i s ... 6
2 C h a n n e l M o d e ls 7 2.1 AWGN channels ... 7
2.2 Fading c h a n n e ls ... 8
2.2.1 T ype of sm all-scale f a d i n g ... 9
2.2.2 Fading channel m odel in th is t h e s i s ... 10
3 T u r b o C o d e s w ith I te r a tiv e D e c o d in g A lg o r ith m s 12 3.1 C hannel c o d i n g ... 12
C O N TE N T S
3.3 T urbo e n c o d e r s ... 13
3.3.1 C oncatenation of RSC codes e n c o d e r s ... 15
3.4 T urbo decoding algorithm s over AWGN c h a n n e l s ... 15
3.4.1 M AP algorithm over AWGN c h a n n e l s ... 16
3.4.2 T he modified M AP algorithm for tu rb o d e c o d in g ... 19
3.4.3 T urbo d e c o d e r ... 21
3.4.4 Log-MAP algorithm over AWGN c h a n n e ls ... 22
3.4.5 M ax-Log-M AP algorithm over AWGN c h a n n e ls ... 23
3.5 T urbo decoding algorithm s over fading c h a n n e ls... 24
4 T u rb o D e c o d in g w ith I n te g r a te d C h a n n e l E s tim a tio n 27 4.1 E stim ation th eo ry ... 28
4.2 A new a l g o r i t h m ... 29
4.2.1 T he first iteration of d e c o d in g ... 29
4.2.2 T he next iterations of d e c o d in g ... 30
5 F a d in g C o m p e n s a tio n 3 4 5.1 Linear M M SE estim ator of th e tra n sm itte d b i t s ... 35
5.2 T h e preprocessing before tu rb o d e c o d in g ... 35
6 E ffe ct o f S N R M is m a tc h on t h e P e r fo r m a n c e o f T u r b o D e c o d in g A lg o r ith m s 3 7 6.1 Effect of an SNR m ism atch (AWGN C h a n n e l s ) ... 38
6.1.1 T h e M ax-Log-M AP a lg o rith m ... 38
6.1.2 T he Log-MAP algorithm ... 40
6.2 Effect of an SNR m ism atch (Fading C hannels) ... 41
6.2.1 T h e M ax-Log-M AP a lg o rith m ... 41
6.2.2 T h e Log-MAP algorithm ... 43
C O N TE N TS
7.2 B E R perform ance of tu rb o decoding algorithm s:
Effect of SN R m i s m a tc h ... 49
8 C o n c lu sio n a n d F u tu r e R e se a r c h D ir e c tio n s 54
8.1 Overview ... 54
8.2 Suggestions for future s t u d i e s ... 56
R e fe r e n c e s 57
List o f F igu res
2.1 AWGN channel m o d e l ... 8
2.2 Fading channel m o d e l ... 10
3.1 RSC codes e n c o d e r ... 14
3.2 T urbo codes e n c o d e r ... 14
3.3 System m odel over AWGN c h a n n e l s ... 15
3.4 T urbo codes d e c o d e r ... 20
3.5 System m odel over fading c h a n n e l s ... 24
4.1 T urbo decoding integrated w ith channel e s tim a tio n ... 29
7.1 Perform ance of C hannel estim ator 2 ... 46
7.2 Perform ance of C hannel estim ator 2 ... 47
7.3 P erform ance of C hannel estim ator 2 ... 47
7.4 B E R perform ance of th e proposed a lg o rith m ... 48
7.5 Effect of SNR m ism atch (fading c h a n n e l s ) ... 49
7.6 Effect of SNR m ism atch (fading c h a n n e l s ) ... 50
7.7 Effect of SNR m ism atch (fading c h a n n e l s ) ... 50
7.8 Effect of SN R m ism atch w ith new m o d e l... 52
7.9 Effect of SNR m ism atch w ith new m o d e l... 52
C h a p ter 1
I n to d u c tio n
1.1
Turbo (iterative) d ecod in g algorithm s
T urbo codes w ith iterative decoding algorithm (M AP algorithm ) were introduced by B errou
and Glavieux in 1993 [3]. A fter introduction of tu rb o codes, a lot of research has been
conducted on th e s tru c tu re of th e tu rb o encoder and tu rb o decoder.
In [6], th e trellis term in atio n of tu rb o encoder and extrinsic inform ation generated by
th e tu rb o decoder have been described thoroughly by R obertson. T h e sam e au th o r in [7]
introduced two kinds of th e m axim um a posteriori (M AP) algorithm s, th e Log-MAP and
M ax-Log-M AP decoding algorithm s. T he perform ance of th e M AP decoding algorithm has
been proved to be rem arkably well over additive w hite G aussian noise (AWGN) channels [3].
Since th e M AP algorithm is very complex, th e Log-MAP and M ax-Log-M AP decoding
algorithm s have been introduced to solve th is problem. T h e Log-M AP algorithm operates
in th e logarithm ic dom ain and reduces th e num ber of additions and m ultiplications in th e
decoding process while its perform ance is th e sam e as th a t of th e M AP decoder. T he Max-
Log-M AP algorithm fu rth er reduces th e com putational com plexity by approxim ating all th e
non-linear functions in th e Log-MAP algorithm w ith th e linear functions. T h e perform ance
1. IN TO D U C TIO N
In [5], Sklar sum m arized th e ideas behind tu rb o decoding. He discussed th e com ponent
codes and th e interleaver in th e tu rb o encoder. He also derived th e channel reliability
factor L c for tu rb o decoding algorithm s over AWGN channels. It was shown th a t th e
channel reliability factor depends on SNR in th is case.
T h e perform ance of tu rb o decoding algorithm s over fading channels has also been studied
since tu rb o decoding algorithm s have been introduced. In [16], B arbulescu assum ed the
fading am plitude and phase are known at th e receiver and th e channel reliability factor
L c for th is case depends on th e SNR and th e fading am plitude. In [18], Hall and W ilson
assum ed only th e phase of th e fading is known at th e receiver and studied th e decoding
process. In [19], th e sam e auth o rs studied th e decoding process w hen th e fading am plitude
is assum ed to be known at th e receiver. In [12], Frenger derived a new tu rb o decoding
m etric over fading channels by considering th e uncertainty of b o th fading am plitude and
phase. Frenger also indicated th a t if th e tra n sm itte d bits experience fading distortion w ith
im perfect channel estim ation, th e channel reliability factor L c depends on b o th SNR and th e
error variance of th e channel estim ate. In [12], using com puter sim ulations, Frenger proved
th a t tu rb o decoding based on his new m etric outperform s th e m etric w ithout considering
th e error variance of th e channel estim ate. He also showed th a t Log-M AP decoder can
achieve b e tte r b it error ra te (BER) perform ance w ith sm aller error variance of channel
estim ate.
T urbo decoding over AWGN channels needs SNR [5], and tu rb o decoding over fading
channels needs b o th SNR and channel fading factor [16], Practically, neither SN R or fading
factor are known at th e receiver. A lot of research th u s has been done on SN R and channel
estim ation schemes for tu rb o decoding. In [28] and [35], SNR and channel(fading) estim ation
schemes for tu rb o decoding have been discussed. All these estim ation schemes can be
classified into th ree categories: pilot-assisted channel estim ation, blind channel estim ation,
and hybrid channel estim ation. T he pilot-assisted and blind channel estim ation m ethods
have been discussed in [36] and [37], respectively. T he hybrid channel estim ation scheme
com bines two schemes. Most of th e proposed m ethods perform channel estim ation w ithout
1. IN TO D U C TIO N
scheme is introduced which uses th e extrinsic inform ation generated from th e tu rb o decoder.
L ater, m ore work was done on th e iterative channel estim ation in [24].
1.2
A new algorithm for turbo d ecod in g w ith channel esti
m ates
In th is thesis, we propose a new tu rb o decoding algorithm for B PSK signaling on Rayleigh
flat-fading channels w ith noisy channel estim ates.
Conventional channel estim ators for tu rb o decoding have no feedback from th e tu rb o
decoder and ignore th e extrinsic inform ation generated from th e tu rb o decoder. W hile, th e
extrinsic inform ation can be fed back to th e channel estim ator to refine its previous estim ate.
In [23], Valenti proposed a tu rb o decoding algorithm w ith integrated pilot-assisted channel
e stim ato r w ithout using th e tu rb o decoding m etric proposed by Frenger in [11]. In [23],
Valenti used th e channel reliability factor L c derived by B arbulescu in [16] and tried to
re-estim ate th e fading factor and th u s derived a new L c. However, the reliability factor
derived by B arbulescu was based on th e assum ption th a t b o th th e am plitude and phase
of fading are perfectly known a t th e receiver. Since in practical com m unication system s,
th e channel inform ation is not available a t th e receiver, th e channel m ust be estim ated at
th e receiver. Because of th e low signal to noise ratios typical of tu rb o coded system s, it is
difficult to obtain perfect estim ates of th e fading coefficients. Hence, for fading channels
w ith noisy channel estim ate, we will use th e channel reliability factor L c derived by Frenger
in [11],
T hen, using a modified version of th e channel reliability factor L c derived by Frenger,
we propose a new iterative algorithm for tu rb o decoding w ith integrated channel estim ation
for Rayleigh flat-fading channels. F urther, we use th e hybrid channel estim ation scheme
in th e proposed algorithm . For th e first iteration, a pilot-assisted channel estim ator is
assum ed to provide us w ith th e initial channel estim ate and its error variance. A fter each
iteratio n of decoding, a blind linear M M SE (m inim um m ean square error) channel estim ator
1. IN TO D U C TIO N
back from th e tu rb o decoder. T he refined channel estim ate is th en sent back to th e Log-
M AP tu rb o decoder for th e next iteratio n of decoding. T his way, in th e blind channel
estim ator, we m ay reduce th e error variance of th e channel estim ate iteratively by using
th e a priori inform ation of th e d a ta bits buried in th e extrinsic inform ation. Finally, th e
resulting iteration between th e channel estim ator and th e tu rb o decoder, w ith interm ediate
exchange of soft channel-sym bol inform ation, can improve th e perform ance of b o th th e
channel estim ator and th e channel decoder.
1.3
P rep rocessin g (fading com p en sation) for tu rb o d ecod in g
In practical system s, in order to undo th e effect of fading, th e received d a ta symbols are
m ultiplied by th e com plex conjugate of an estim ate of th e channel gain before tu rb o de
coding, [44], Since th ere has been no m athem atical justification in th e lite ratu re for this
kind of fading com pensation for system s w ithout perfect knowledge of th e channel, we try
to come up w ith some justification. F irst, we derive a linear M M SE estim ato r to o btain
optim al estim ates of th e tra n sm itte d d a ta symbols w ith noisy channel estim ates. Then, it is
shown th e linear M M SE estim ator can b e viewed as a norm alized version of th e preprocess
ing (fading com pensation) operation used in m ost existing tu rb o decoding algorithm s, [11].
Also, we show th a t th e norm alization has no effect on th e B E R perform ance of th e tu rb o
decoder.
1.4
Effect o f S N R m ism atch on B E R perform ance
One requirem ent of th e Log-M AP tu rb o decoder over fading channels is th e knowledge
of SN R and th e error variance of channel estim ate. Since th e proposed tu rb o decoding
algorithm composed of th e Log-MAP decoder, b o th th e channel SNR and th e channel
fading m ust be estim ated. Adding any estim ator to th is algorithm increases th e com plexity
of th e algorithm . Therefore, any decoding algorithm th a t does not need perfect knowledge
of SN R or fading factor is m ore desirable. T he effect of SNR m ism atch on th e perform ance
1. IN TO D U C TIO N
and Nichols. In [30] and [28], th e effect of SNR m ism atch over th e fully interleaved channels
has been discussed. Valenti and W oerner fu rth er discussed th e effect of SNR m ism atch over
correlated fading channels in [27]. In [9], W orm indicated th a t M ax-Log-M AP tu rb o decoder
is insensitive to SNR m ism atch over AWGN channels and fading channels. However, this
result is valid for th e M ax-Log-M AP tu rb o decoding over AWGN channels. W hereas, for
th e M ax-Log-M AP tu rb o decoding over fading channels, it was assum ed th e fading factors
are known at th e receiver. Using such an assum ption, th e Rayleigh fading channel may
th en be viewed as an AWGN channel conditioned on th e fading coefficient. However, for
fading channels w ith im perfect channel estim ation, th e error variance of channel estim ate
m ust be included in th e channel reliability factor L c, [12].
In th is thesis, we stu d y th e sensitivity of th e Log-MAP and M ax-Log-M AP algorithm s
to SNR m ism atch over fading channels by using th e channel reliability factor L c derived
in [12]. We show th a t b o th th e Log-MAP and M ax-Log-M AP decoder are sensitive to
SNR m ism atch over fading channels when th e channel is not perfectly known. However, we
find th e M ax-Log-M AP decoder is less sensitive to th e SNR m ism atch th a n th e Log-MAP
decoder.
1.5
A N ew S N R m ism atch m odel
At last, we also propose a new SNR m ism atch model. T he new SNR m ism atch model is
m ore practical th a n th e conventional m odel used in th e literatures. T h e conventional model
considers all th e d a ta fram es experience th e sam e SNR m ism atch offset at a given SNR. In
th e new model, we consider th e SNR m ism atch is a random variable and different frames
experience different SNR m ism atch. U nder th e new model, we can still verify th a t b o th
Log-MAP and M ax-Log-M AP decoder are sensitive to SNR m ism atch over fading channels
1. IN T O D U C TIO N
1.6
O rganization of th e th esis
T he organization of th is thesis is as follows. In C h ap ter 2, th e channel models are introduced.
In C h ap ter 3, th e tu rb o encoder and tu rb o decoding algorithm s are described. In C hapter
4, we propose a new Log-MAP tu rb o decoding w ith integrated w ith channel estim ation
over fading channels. In C h ap ter 5, th e preprocessing or fading com pensation is discussed
from th e estim ation th eo ry point of view. In C h ap ter 6 , th e effect of SNR m ism atch on th e
perform ance of tu rb o decoding algorithm s is investigated. In C h ap ter 7, sim ulation results
are presented and also we introduce a new model to stu d y th e effect of SN R m ism atch
on th e B E R perform ance of tu rb o decoding algorithm s. Finally, conclusions and futu re
C h a p ter 2
Channel M o d els
To design th e channel estim ator and analyze th e effect of SN R m ism atch on th e perform ance
of tu rb o decoding algorithm s, we have to u nderstand th e channel th a t th e tra n sm itte d
d a ta b its experiences. In this thesis, we need two kinds of channel models to discuss our
contributions. In th is chapter, we first introduce additive w hite G aussian noise (AWGN)
channel model, and th e n fading channel model.
2.1
A W G N channels
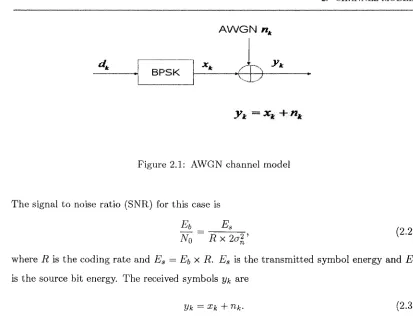
T he additive w hite G aussian noise (AWGN) channel model to g eth er w ith bin ary phase shift
keying (B PSK ) m od u lato r is depicted as in figure 2.1. W here dk G (0,1) are th e tra n sm itte d
d a ta bits, x k G { — \ f E l , \ f E s ) are B PSK sym bols, n k are th e additive w hite G aussian noise
and y k are received symbols. In AWGN channel models, a AWGN noise n k is added to th e
tra n sm itte d symbols xk. Here, n k are comp lex-valued and G aussian d istrib u te d random
variables. T he m ean and variance of n k are
E [n k} = 0,
2. CHANNEL M ODELS
BPSK
A W G N n k
x±—
y t = x * + * *
Figure 2.1: AWGN channel model
T h e signal to noise ratio (SNR) for this case is
Eb E s
(2.2)
N 0 R x 2 a2 ’
where R is th e coding ra te and E s = Eb x R . E s is th e tra n sm itte d sym bol energy and Eb
is th e source bit energy. T he received symbols y k are
y k = x k + n k. (2.3)
For com m unication system s over AWGN channels, at th e receiver, we need to know th e
signal to noise ratio. Normally, th e symbol energy E s is set to 1 and th e coding ra te R is
known. T he noise variance No is th e only value we need to estim ate to get th e SNR.
2.2
Fading channels
For wireless com m unications, th e tra n sm itte d d a ta bits will experience a much more compli
cated channel th a n AWGN channel. Due to th e com plex environm ents between th e wireless
com m unication term inals (buildings, forests and vehicles) and movem ent of th e term inals,
th e tra n sm itte d d a ta bits will be affected by unpredictable errors. N orm ally these errors are
called channel fading. And th e wireless channels are usually m odeled as fading channels.
C hannel fading can be classified into two categories:
• Large-scale fading
2. CHANNEL MODELS
In [40], it has been m entioned “Large-scale fading is caused by reflection, diffraction and
scatting o f the signals when they are obstructed by buildings, forests and vehicles”. This
ty p e of fading usually reflects a long period of channel characteristics.
Small-scale fading, or sim ply fading, on th e o th er hand reflects a short period of channel
characteristics. Small-scale fading is caused by th e m u ltip ath interference waves and th e
movem ent of th e wireless term inals. T he m u ltip ath interference waves are th e different
versions of th e tra n sm itte d d a ta bits arriving a t th e receiver a t different tim es. T he sum of
th e m u ltip ath waves at th e receiver will result in a received signal which can varies widely
in am plitude and phase. T he movement of th e term inals will also introduce channel errors.
In th is thesis, we only use th e small-scale fading channel model. Below, we will only talk
ab o u t th e sm all-scale fading.
2.2.1
T ype o f sm all-scale fading
T he ty p e of sm all-scale fading depends on th e two im p o rtan t factors in th e wireless com m u
nication channels: m u ltip ath delay and D oppler spread. M ultip ath delay is introduced by
m u ltip ath interference waves. Doppler spread is introduced by th e movement of th e wireless
term inals. In this thesis, we only briefly introduce th e fading types, for detail, see th e book
by S tiiber, [40].
• Fading types due to m u ltip ath delay
M u ltip a th delay causes th e tra n sm itte d signal to experience eith er flat or frequency
selective fading.
If th e tran sm itte d d a ta bits period is greater th a n th e m u ltip ath delay, th e tra n sm itte d
d a ta bits will experience a flat fading. On th e o th er hand, if th e d a ta bits period is shorter
th a n th e m ultip ath delay, th e d a ta bits will experience a frequency selective fading.
• Fading types due to Doppler spread
D oppler spread causes th e tra n sm itte d signal to experience eith er slow or fast fading.
If th e signal b an d w id th is much greater th a n th e D oppler spread, th e tra n sm itte d bits
will experience a slow fading. If th e signal band w id th is sm aller th a n or close to th e D oppler
2. CHANNEL MODELS
a k AWGN nk
BPSK
y* = «»■ *»+ »*
Figure 2.2: Fading channel model
Two kinds of fading classification are independent.
2.2.2
Fading channel m odel in th is th esis
T he fading channel model used in th is thesis is a sm all-scale flat fading channel. T he
Rayleigh fading model is th e most common channel model used to describe th e flat fading
channel. T he fading channel model to g eth er w ith th e B PSK m odulator is depicted as
Fig 2.2. C om pared w ith th e AWGN channel model, th e m ultiplicative fading factors a*
are added. T he fading factors are complex-valued and G aussian d istrib u te d random
variables. T he m ean and variance of a*, are
We assum e a*. and n*, are independent and th e th e variance of th e received bits y& are:
A nd th a t is why th is fading channel model is called Rayleigh fading channel model.
For com m unication system s over Rayleigh fading channels, a t th e receiver, we need
b o th signal to noise ra tio and th e fading factors. Fading channels are m ore complex to E[ak] = 0,
E[\ak |2] = 2 a \. (2.4)
(2.5)
T he am plitude \a^\ has a Rayleigh d istrib u tio n w ith p d f
2. CHANNEL MODELS
analysis th a n AWGN channels because we need to estim ate th e fading factors. T here are
m any channel estim ation schemes. T hey can be classified into th ree categories: pilot-
assisted channel estim ation, blind channel estim ation and hybrid channel estim ation. In
C h a p ter 3
Turbo Codes with I te r a tiv e Decoding
A lg o r ith m s
3.1
C hannel coding
T he fading and AWGN noise induced by channels will affect th e tra n sm itte d d a ta bits a
lot. At th e receiver, it is very hard to recover w hat have been originally sent out. Channel
coding is an effective m ethod for deducing th e effects introduced by channels.
T here are m any different types of error control codes, b u t th ey can be classified into
block codes and convolutional codes. In [40], it has been m entioned th a t “B oth block codes
and convolutional codes are used in the mobile radio system s. Som e second generation digital
cellular standards (e.g., GSM, IS-54) use convolutional codes, while others (e.g., P D C ) use
block codes”.
Block codes can detect and correct a lim ited num ber of errors. T h e detecting and
correcting error ability of th e block codes depends on th e code free distance. T raditional
block codes include H am m ing codes, BCH codes, Reed-Solomon codes etc. H ard decision
block decoders are easy to im plem ent.
3. TU RBO CODES W IT H IT E R A T IV E DECODING A LG O R ITH M S
into blocks and th e n encoding, convolutional codes use linear finite shift registers (LFSR)
to encode th e d a ta bits sequence. Convolutional codes outperform block codes. T he most
com m on decoding algorithm for convolutional codes is V iterbi algorithm .
T urbo codes, introduced by B errou and Glavieux in 1993 [3], also known as parallel
concatenated recursive system atic convolutional codes, can outperform m ost codes.
3.2
Turbo codes
T urbo codes w ith iterative decoding algorithm (M AP algorithm ) were introduced by B errou
and Glavieux in 1993 [3]. T he tu rb o encoder in [3] consists of two RSC encoders, a random
interleaver and a m ultiplexer. T h e m ultiplexer concatenates th e o u tp u ts from th e two
RSC encoders and sends th em out serially. W h a t makes tu rb o code different from other
channel codes is its special decoding algorithm s. T he tu rb o decoder in [3] consists two
M AP decoders. Two M AP decoders generate and exchange the extrinsic inform ation. T he
decoding process runs several tim es to obtain a b e tte r B ER perform ance.
3.3
Turbo encoders
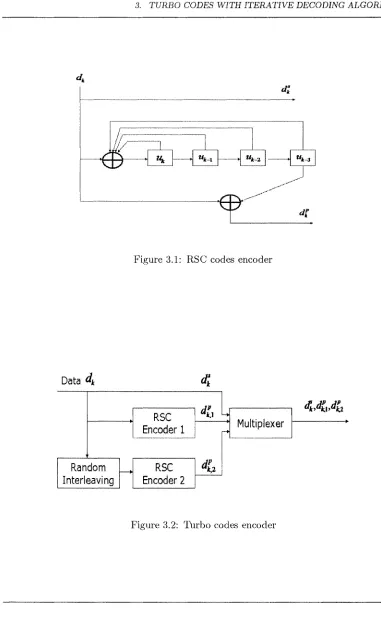
T he tu rb o encoder in [3] consists of two recursive system atic convolutional (RSC) codes
encoders. A sim ple binary code ra te 1/2 RSC codes encoder w ith code m em ory 4 is depicted
in Fig. 3.1, where th e bits in th e m em ory u k is recursively calculated as
3
^ k ~ dk -f ^ (^*1)
i=0
T he corresponding codeword is th e b it pair (d|,d]()
d/; = dfc ,
3
dpk = dk + ^ g u i i k - i , m o d i 52; = 0,1 (3.2) i=0
where g n = (11111) and c/2i = (10001) are th e code generators. T hey can also be expressed
3. TURBO CODES W IT H IT E R A T IV E DECODING A LG O R ITH M S
A
U /
Figure 3.1: RSC codes encoder
Data <4 d *
Multiplexer
RSC Encoder 2
RSC Encoder 1
Random Interleaving
3. T U RBO CODES W IT H IT E R A T IV E DECODING ALG O RITH M S
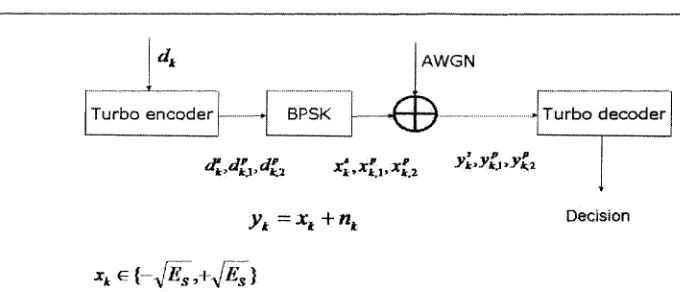
AWGN
BPSK
T urbo e n c o d e r T u rb o d e c o d e r
y t = xt + nk
D ecisionXk ^ V \ }
Figure 3.3: System model over AWGN channels
3.3.1 C oncatenation o f R SC codes encoders
T h e tu rb o encoder in [3] is shown in Fig. 3.2. T he source d a ta bits are sent to th e first RSC
codes encoder. T he interleaved version of d a ta bits will be sent to th e second RSC codes
encoder. T h e codewords are dsk , dpk l and dpk 2, where dsk are source d a ta b its and dFk l ,cPk 2 are
th e p arity bits from th e first and second RSC encoder respectively. T h e code ra te for this
tu rb o encoder is R = 1/3, th e o u tp u t sequence from th e m ultiplexer is {dsk ,cPk v <Pk 2 • • • }.
For higher code rate, we can add a switch to p u n ctu re th e codeword. For example, for
R = 1/2, th e o u tp u t sequence from th e m ultiplexer is {dsk, cPk 1; dsk+1, dpk+l 2 • • • }.
However, this is no t th e only construction of th e tu rb o encoder. In [4], th e tu rb o encoder
can consist of N RSC encoders, th e coding ra te for th a t system will be 1 / N . Also in [14]
and [15], it has been indicated th a t th e com ponent codes of tu rb o encoder can b e any block
codes and convolutional codes, not only RSC codes. Different design of tu rb o codes encoder
will result in different codes perform ance and decoding complexity.
3.4
Turbo d ecod in g algorithm s over A W G N channels
T h e tu rb o codes system over AWGN channels is depicted in Fig. 3.3. M axim um a poste
riori probability (M AP) decoding algorithm s is th e optim al algorithm for tu rb o decoding.
Max-3. TU RBO CODES W IT H IT E R A T IV E DECODING ALG O R ITH M S
Log-MAP decoding algorithm s have been introduced to make th e im plem entation practical.
Below, we discuss th e detail of these decoding algorithm s over AWGN channels and fading
channels.
3.4.1
M A P algorithm over A W G N channels
T he optim al sequence decoding algorithm for convolutional codes is V iterbi algorithm .
V iterbi algorithm is a very sim ple decoding algorithm and its decoding process depends
on th e stan d ard of m axim izing a posteriori probability of a sequence received bits. M AP
algorithm , on th e o ther hand, tries to decode th e received d a ta bits depending on m axim iz
ing a posteriori probability of each received bit. V iterbi algorithm is a sequence decoding
algorithm and M AP algorithm is a bit-by-bit decoding algorithm . T h e M AP algorithm is
discussed thoroughly in [1] and [3], bellow we tr y to explain th e fundam entals.
In th e M AP decoder, we need to calculate th e a posteriori probability (A P P ) of each
received bit. For binary phase shift keying (B PSK ), th e tra n sm itte d bits can only be 0 or 1,
so we need to calculate two A P P P r { d k = i / observat ions}, i = 0,1. T he decoder decision
depends on:
dk = 1 i f Pr { dk = 1 /observations} > Pr {dk = 0 /observations},
dk = 0 i f Pr { dk = 1 /observations} < Pr {dk = 0/observations}. (3.3)
T h e observations are th e received bits. We assum e th e frame size is N and th e observations
are th e received bits from 1 to N, noted as R ^ , Rk = {VkiVk}- "Phe APP* can be expressed
as
Pr { dk = i / R \ } * = 0,1 (3.4)
T he A P P can be derived from th e joint probability:
P r { d k = i / R i } = ^ T P r { d k = i , S k = m / R ? } , m
-
EE
P r { d k = i , S k — m , S k - i = m ' / R x } . (3.5) m m,'where S k is th e encoder trellis sta te at tim e k and Sk~i is th e encoder trellis s ta te a t tim e
3. TU RBO CODES W IT H IT E R A T IV E DECODING A LG O R ITH M S
as
P r { d k = i / R % } = — 1
EE
P r { d k = i, S k = m, Sk _ 1 = to ', P f } . (3.6)*- 1 -* m rri
F urther, if th e trellis s ta te S k is known, th e trellis s ta te and received bits after tim e k are
not affected by observation R \ and b it dk. Using th e Bayes’ rule, th e A P P can be expressed
as
P r { d k = i / R i } = ~ j ^ Y l l E P r U k = h s k = 'rri,Sk_ l = m /, R k1~ l , R k, R $ r+1}
f 1 ■* m m l
= P r { R N \ ^ ^ P r { R L i / S k = m }
t 1 J
rn m!
x P r { d k = i, S k = m , S k^ i = to ', P^- 1 , R k }
1 E E P r { 4 A = ™} P r { P f }
x P r { d k = i , S k = m, R k/ S k„i = m ' } P r { S k_i = to ', P * - 1 } (3.7)
m m '
J ryk—l i
In [1], th ree probability functions have been defined to help th e calculation of th e APP:
a k {m) = P r { S k = m , R \ } ,
(3k (m) = P r { R ^ +1/ S k = m},
7i ( R k, m ' , m ) = P r { d k = i, S k = to, R k/ S k^ i = m '}. (3.8)
where a k ( m), 0 k(m), and 7;(P&, m ', to) are called forward probability, backw ard probability,
and tran sitio n probability, respectively. By taking (3.8) into (3.7), we obtain
P r { d k = i / R = 'Yi(Rk , m ' , m ) a k_i(m')(3k (m) (3.9) 1 ' m m '
3. TU RBO CODES W IT H IT E R A T IV E DECODING A LG O R ITH M S
follows:
a k {m) = P r { S k = m , R 1} l
-
EE
P r { d k = i, S k_i = m ', S k = to, R \ }m ' i= 0
1
= ' Y L ' Y l P r { dk = S k = m , R k, R \ ~ 1}
m ! i= 0
1
= X X P r i d k = i , s k = rn, R k/ S k^ i = m ' } P r { S k^ i = t o ', P j - 1 } m'
1
= EE
T i ( R k , m ' , m ) a k_ i ( m ' ) (3.10)m l 2 = 0
Pk(m) = = to}
i
- E E
m' 2=0 1
-
EE
P r { d fc+1 = i, S k+1 = to ', Pfc+i, R k+2/ S k = to}m ' 2 = 0
1
= X X
P r i dk + 1 =^ + 1 = TO'> -Rfe+l/^ = ™}-P»'{^f+2/S'fc+l =
™!}m ! i= 0
1
=
EE
' ji(Rk+ i , m , m , )pk+i ( m l) (3.11)m l 2 = 0
T h e tran sitio n probability can be fu rth e r separated into th ree term s:
7i ( R k , m ' , m ) = P r { R k/ d k = i, S k = to, S k- i = m ' } P r { d k = i, S k = m / S k- i = to'}
= P r { R k/ d k = i , S k = to, S k^ i = m ' } P r { d k = i / S k = to, S k_i = to'}
x P rlP fe = m / S k - i = to'}. (3.12)
3. TU RBO CODES W IT H IT E R A T IV E DECODING ALG O R ITH M S
d a ta bits y sk are independent of th e trellis states:
P r { R k/ d k = i , S k = m , S k„ x = m ' } = P r { y k/ d k = i, S k = m , S k- \ = m ' }
y~Pr{i/k/ d k = i , S k = m , S k_ x = m ' }
= P r { y k/ dk = i}
x P r { y pk/ d k = i , S k = to, S k^ x = to'} (3.13)
P r { y k/ dk = i}
i (yj-xi) ‘2 ■ e 2<dl rr Or,
1 (Vfc x)c)
P r { y pk/ d k = i , S k = m , S k- X = to'} = - = e 2<n> (3.14) V 2 r r a n
T he second term of (3.12), P r { d k = i / S k = m , S k^ x — to '} , is 0 or 1 depending on th e
trellis. T he th ird te rm of (3.12), P r { S k = m / S k^ x = to'}, is 1/2 depending on trellis.
3.4.2 T he m odified M A P algorithm for turbo decoding
In [3], in order to use th e M AP algorithm in tu rb o decoding, B errou modified th e original
M AP algorithm . Since B PSK signal only have two possible values, for simplicity, instead
of calculating each a posteriori probability, we calculate th e log-likelihood ra tio (LLR) of
th e a posteriori probabilities. T he LLR can be expressed as
P r { d k = I/ ob s er va ti o n s }
m ) = log > U 4 = 0 M » en m t W T (3-15)
At th e decoder, after iteratively decoding, we can make a decision dk by com paring A(dk)
to a threshold equal to zero
dk = 1 i f A(<4) > 0,
dk = 0 i f A ( d k) < 0. (3.16)
T h e LLR A(dk) can be expressed as th e function of th ree probabilities:
A W = log E " ^
3. TURBO CODES W IT H IT E R A T IV E DECODING ALG O R ITH M S
MAP
DEC1
MAP
DEC2
DEMUX
Inter
leaving
D
einter-leaving
D
einter-leaving
Inter
leaving
D eco d er decision
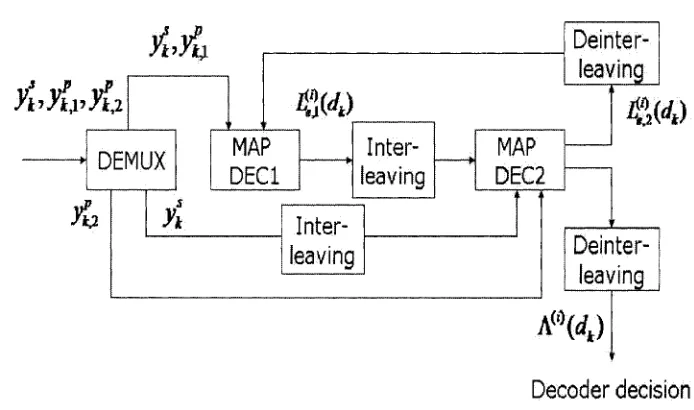
Figure 3.4: T urbo codes decoder
As indicated in [6], th e LLR A (dk) can be fu rth er separated into th re e term s
Em Em' 7 i ( l / k , m \ m ) a k _ 1( j v / y h ( m )
A (dk) = log+ log D M E i z A + log
P r l v l / d ,
= 0} + 8P r { i k
, 0} ’L e{dk) + L c ■ y \ + L a{dk). (3.18)
w here L e{dk) is th e extrinsic inform ation generated from th e decoder, L c ■ y sk represents th e
reliability value of th e channel, L c is called th e channel reliability factor and L a{dk) is th e
a priori inform ation of th e tra n sm itte d bits. From equation (3.14), th e channel reliability
factor L c for discrete memoryless G aussian channels [5] is
4 \XE7 L r =
N 0 (3.19)
T he extrinsic inform ation L e(dk) is independent of th e channel reliability value L c ■ y k and
3. TU RBO CODES W IT H IT E R A T IV E DECODING ALG O R ITH M S
3.4.3
Turbo decoder
T h e tu rb o decoder in [3] is depicted in Fig. 3.4. In th e decoder, a de-m ultiplexer first
accepts th e serial received bits and parallel sends th em out. T h e received d a ta bits y k
and p arity bits y k 2 are sent to th e first M AP decoder. T he received p arity bits ypk 2 and
interleaved version of th e received d a ta bits y k are sent to th e second M AP decoder.
In th e first M AP decoder, for th e first iteration of decoding, th e a priori probability
L a,i{dk) is set to 0. T he extrinsic inform ation is derived as:
l £ } ( d k) = A {^ \ d k ) — L c - y k — L a,i(dk). (3.20)
T he subscript 1 in L ^ \ ( d k) and A^ \ d k) represents th e first decoder and th e superscript
(* = 1) represents th e first iteration of decoding. T he subscript 1 in L ap{dk) represents
th e a priori probability of th e first tu rb o decoder. T he channel reliability factor L c is
independent of th e num ber of iterations and decoder. T his extrinsic inform ation L ^ \ ( d k),
after interleaved, is sent to th e second M AP decoder. T he second M AP decoder will tak e th e
extrinsic inform ation L ^ \ [ d k) as th e a priori inform ation of th e tra n sm itte d d a ta bits. In
th e second M AP decoder, after decoding, a new extrinsic inform ation is L ^\ {d k) generated:
L ^ ( d k) = h ^ \ d k) - L c - y sk - L a a {dk),
= k f i d ^ - L ^ - y i - L ^ d k ) (3.21)
T he L ^ \ { d k), after de-interleaved, is fed back to th e first M AP decoder.
For th e next iterations, th e first M AP decoder will take th e de-interleaved version of
Tg*2 l \ d k) as the a priori inform ation of th e tra n sm itte d d a ta bits; th e second M AP decoder
will take th e interleaved version of l\ d k) as th e a priori inform ation of th e tra n sm itte d
d a ta bits. T he general formula for generating extrinsic inform ation w hen th e num ber of
iterations i > 1 are:
L {:\ ( d k) = h . f { d k) - L c - y { - L ^ l\ d k),
L % ( d k) = A ^ ( d J - L c - y i - L ^ i d k ) . (3.22)
3. TU RBO CODES W IT H IT E R A T IV E DECODING ALG O R IT H M S
3.4.4
Log-M A P algorithm over A W G N channels
Log-MAP decoder does not change th e way to o b tain th e extrinsic inform ation. Log-
M AP decoder changes th e way to calculate th re e probability functions a k ( m ) , /3k ( m)
and j i ( R k , m ' , m ) . Instead of calculating th ree probabilities directly, Log-MAP decoder
calculates th em in th e logarithm ic dom ain.
7 il(yk>yk)’m , ’ m } - los(7i ( R k , m ' , m ) ) ,
a k( m) A log(a!jfe(m)),
/? k(m) = log(Pk (m)). (3.23)
Jacobian logarithm is used in [7] to derive th e Log-MAP algorithm . T h e Jacobian logarithm
for two param eters is expressed as
ln(e'Sl + e&2) = m a x {5i ,5 2) = m a x ( 5i , 8 2) + ln (l + e_ l'52_'5ll). (3-24)
T he Jacobian logarithm for more th a n two param eters can be derived recursively from
(3.24):
ln(ec?1 + • • • + eSn) = m a x ( S i, • • • , Sn )
= ln(A + eSn) w i th A = eSl -) -f e15" -1 = e&
= max(5, Sn ) + ln (l + e~ ^n_<^) (3.25)
T h e S can derived from 5' = l n ^ 1 + • • • + eSn~2) and so on.
T h e way to derive th e probabilities in logarithm ic dom ain is out of range of th is thesis.
For detail, please see in [7]. Here, we use th e sam e notatio n as in [7] and sim ply present th e
way to calculate th e th ree probabilities:
7 i[{ySk , y Pk ) , m ' , m ] = ^ L a{dk) x sk(i) + ^ L cy skx sk{i) + ^ L cy pkx pk{i)
a k(m) = m a x { 7 i M , ^ ) , m ', m ] + 5 ^ ( 171')}
(m' ,i)
Pk(m ) = m ax{7i[(2/A +i>^+i)>m >m /l (m'.t) +Pk+i{™')}
3. TU RBO CODES W IT H IT E R A T IV E DECODING ALG O R IT H M S
We see 7i{(ysk, y ^ ) , m ' , m \ depends on th e channel reliability factor L c, th e a priori in
form ation L a(dk) and received bits. a k ( m) and /3k (m) can be calculated recursively by
7i [(ysk , y pk) , m ' , m \ w ith non-linear m ax functions. These results are very im p o rtan t for th e
discussion of th e contributions later.
T h e way to derive LLR A(dk ) [7] is:
A ( d k) = Tnax -f a n ( m ' )
(771,771' )
+0*(™ )} - m S r { 7 0[(ysk , y pk) , m ' , m ]
(771,771' )
+ a k^ l ( m /) + P k(m) } (3.27)
T he calculation of LLR also needs th e non-linear functions max.
3.4.5
M ax-L og-M A P algorithm over A W G N channels
T h e Log-MAP algorithm reduces com putational complexity, bu t it still has m any nonlinear
functions max. T he M ax-Log-M AP algorithm solves th is problem by using approxim ations.
T he M ax-Log-M AP decoder is deduced from th e Log-MAP decoder by su b stitu tin g th e non
linear functions m ax w ith th e linear functions ma x . T he LLR A ( d k) and probabilities can
be expressed as
A(dk) = m ax {7 1[ ( ^ , ^ ) , m / ,m] + a k_ i ( m ' )
(771,771' )
+P k ( m) } - m ax {7 0 [(y*,*/£),to ',m ]
(771,771' )
+ a k^ i ( m ' ) +(3k{m)}, (3.28)
a k (m) = m ax{7 i [ ( ^ , ^ ) , m /,m ] + a k_1(m')}, (Til' ,l)
Pk(m) = p a x { 7 i[(y * +1,yfc+1) , m , m ' } + P k+1{m')}.
(Til' ,l)
(3.29)
3. TU RBO CODES W ITH ITERATIVE DECODING A LG O R ITH M S
Decoder decision Preprocessor I Encoder
; & BPSK
Turbo Decoder Channel Estimator 1
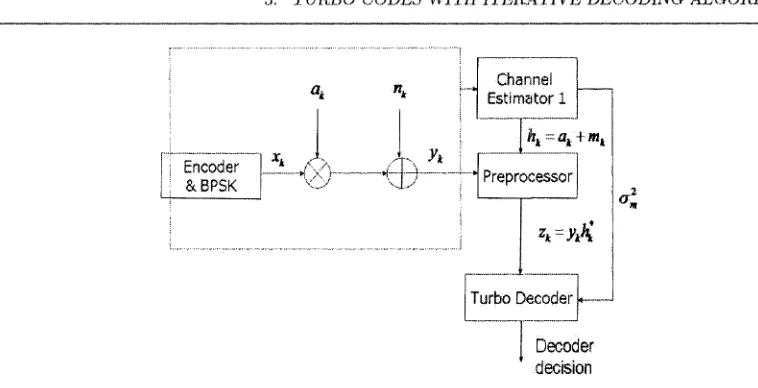
F igure 3.5: System model over fading channels
3.5
Turbo d ecod in g algorithm s over fading channels
T h e tu rb o decoding algorithm s over fading channels are sim ilar w ith those over AWGN
channels. In [12], it has been indicated th a t “when S N R is known, the decoding algorithms
that are used f or A W G N channels remain unchanged and only the channel reliability factor
L c needs to be redefined”. By including th e tu rb o decoder, fading channel m odel and tu rb o
decoder, th e system model over fading channels is depicted in Fig. 3.5.
In th is thesis, we assum e th a t an initial channel estim ation is available from a
pilot-assisted channel estim ator (channel estim ato r 1). T he initial channel estim ate hk is m odeled
as in [12]
h k = ak + m k , (3.30)
where ak is the actual channel fading factor, m* is th e channel estim ation error. T he m* is
a complex-valued G aussian d istrib u te d random variable w ith m ean and variance
E[rnk] = 0,
3. TU RBO CODES W IT H IT E R A T IV E DECODING A LG O R ITH M S
We assum e ak and m k are independent, th e m ean and variance of channel estim ate h k are
E[ hk\ = 0,
E[\hk\2] = 2 a l = 2 ( a l + a l ) . (3.32)
By com paring th e system m odel over fading channels w ith th a t over AWGN channels,
besides th e fading factor a k and pilot-assisted channel estim ator, a new preprocessor is also
added. T his processor will be discussed in detail in chapter 5. In th e preprocessor, w ith th e
received bits yk and initial channel estim ate h k available, we calculate th e decision variables
Zk ~ Uk^k ~ z k^r j z k,ii (3.33)
w here j is th e im aginary unit and z k r and z k % are th e real and im aginary p a rt of z k. In [12],
th e cross correlation coefficient of y k and h k is defined as:
E[ Vkh*k ]
x k
= \y\e~jsk. (3.34)
F urther, Frenger in [12] derived th e probability of decision variable conditioned on th e
tra n sm itte d bits as follows:
P r { z k/ d k } = - — ---- — exp 2irazha ^ ( l - \ y \ ^
^■[zkRk]
* • 1 d ^ 1 ’ ( 3 ' 3 5 )
° v°>»(i - H 2).
w here K q { x ) is th e zeroth-order Hankel function of x, and 5R[ar] is th e real com ponent of x.
Over AWGN channels, when we derive th e channel reliability factor L c, we use th e
probability of received d a ta bits on th e tra n sm itte d bits:
1
P r { y i / d k} = — - (3.36) v27rcrn
and th e channel reliability factor L c is derived as:
j P r i V k / d k = 1} = L s g P r { y sJ d k = 0} cVk’
3. TU RBO CODES W IT H IT E R A T IV E DECODING A LG O R ITH M S
Over fading channels, based on th e analysis of conditional probability of decision variable
Zk, the channel reliability factor for tu rb o decoding algorithm s over fading channels can be
redefined as follows:
As seen, by assum ing th a t th e variance of fading factor a % is known, th e channel reliability
factor L c over fading channels depends on b o th SNR and th e error variance of channel
estim ate a
T h e way of th e Log-MAP and M ax-Log-M AP decoding algorithm s over fading channels
will stay th e sam e as over AWGN channels. T here are only two m odifications. T h e original
received bits yk is replaced by th e decision variables Zk and th e channel reliability factor L c
is redefined as in (3.39).
P r j z k / d k = 1}
(3.38)
where
C h a p ter 4
Turbo Decoding w ith In tegrated Channel
E s t im a t io n
Log-M AP tu rb o decoding algorithm over fading channels needs th e inform ation of SNR and
th e error variance of channel estim ate to obtain th e channel reliability factor L c. It has
been proved in [12] th a t sm aller error variance results in b e tte r B E R perform ance. M any
estim ation schemes have been introduced to reduce the erro r variance of channel estim ate
and th u s improve th e B E R perform ance. Most of th e schemes are processed before th e
s ta rt of th e tu rb o decoding. However, th e extrinsic inform ation generated and exchanged
betw een th e tu rb o decoders has some a priori inform ation of th e tra n sm itte d d a ta bits.
T his inform ation can help us to refine th e channel estim ate and reduce th e cr^ after each
iteration of decoding.
In th is chapter, we propose a new algorithm of tu rb o decoding integrated w ith channel
estim ation over fading channels. We use th e Log-MAP tu rb o decoder in our new algo
rithm . A nd th e hybrid channel estim ation scheme is used to refine th e channel estim ation.
We first review th e estim ation theory in th e m ean-square-error sense. T hen th e working
4. TU RBO DECODING W IT H IN T E G R A T E D CH ANN EL E STIM A T IO N
4.1
E stim ation th eory
Using th e theory of estim ation, we can derive an estim ator to estim ate an unknown p ara
m eter from our observations. Usually, in th e estim ation process, we tr y to minimize a cost
function. In th e m ean-square-error sense, th e cost function is
C[x, x\ = E[(x — x ) 2\, (4.1)
w here x is th e unknow n signal and x is th e estim ate. Given a collection of observations y,
th e m inim um -m ean-square-error (MMSE) estim ato r of x given y is given by, [42],
x = E \ x \ y } = ( x f x\y{x\y), (4.2) J s x
w here S x is th e dom ain of x. T he m ean value of th e estim ate and th e resulting m inim um
cost is given by
E[x\ = x,
E [ { x - x ) 2} = E [ x2] - E [ x 2}. (4.3)
However, it is not always easy to obtain a closed form expression for th e M M SE estim ator.
T his difficulty limits m any engineers to th e linear estim ators. T he linear M M SE estim ator
and its m inim um cost function or error variance can be expressed as
x = x + K 0(y - y ) ,
m in(£'[(x - x )2]) = R x - R xyR ~ [R yx, (4.4)
where Ko is any solutions to th e equation KqRv = R xy, and
R x = E[(x - x ) ( x - x)*},
R xy = E[{x - x ) ( y - y ) * ] ,
R yx = E [ { y - y ) { x - x ) * ) ,
4. TU RBO DECODING W IT H IN T E G R A T E D CH ANN EL E STIM A TIO N
Fading channel
DEMUX
Delay
Channel
Estimator 2
Preprocessor
Channel
Estimator 1
Turbo Decoder
z « = * / r
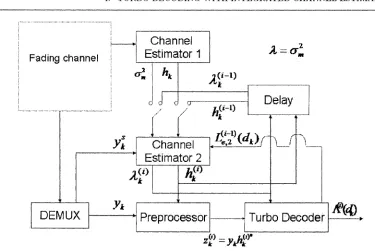
Figure 4.1: T urbo decoding integrated w ith channel estim ation
4.2
A new algorithm
In th is thesis, we propose a new tu rb o decoding algorithm w ith integrated channel esti
m ation over Rayleigh fading channels as depicted in Fig. 4.1. T he tu rb o decoder used in
th is algorithm is a Log-MAP decoder. C om paring w ith th e original Log-M AP decoder over
fading channels, we have added th e following blocks: a blind channel estim ator (channel
estim ator 2), a de-m ultiplexer, and a delay module.
4.2.1 T he first iteration of decoding
For th e first iteration, we assum e th e re is a pilot-assisted channel estim ato r (channel esti
m ator 1) which provides us w ith th e initial channel estim ate hk and th e ir error variance
<7^. T his initial channel estim ate hk go th ro u g h th e channel estim ato r 2 which is a blind
linear M M SE channel estim ator w ithout any processing. A fter th a t, th ey are sent to b o th
4. TU RBO DECODING W IT H IN T E G R A TE D CH ANN EL E ST IM A T IO N
estim ato r 2 and is sent to b o th th e tu rb o decoder and th e delay m odule. T he delay m odule
reserves hk and cr^ for th e next iteration of channel estim ation. In th e tu rb o decoder, after
th e first iteration of decoding, we have th e first version of th e extrinsic inform ation L ^ \ ( d k )
of th e tra n sm itte d d a ta bits. T h e de-interleaved version of th e extrinsic inform ation L^X\(dk)
from th e second Log-MAP decoder, instead of being fed back to th e first Log-MAP decoder,
is sent to th e channel estim ator 2.
4.2.2
T he n ext iterations o f decoding
For th e next iterations, a de-m ultiplexer takes out th e received d a ta bits y sk and sends th em
to th e channel estim ato r 2, th e proposed estim ator. D epending on th e reserved channel
(i — 1)
estim ate h k and its error variance, th e received d a ta bits y k and extrinsic inform ation
Lg*2 X\ d k ) , we refine th e channel estim ate for d a ta bits h!~k and its erro r variance in th e
linear M M SE estim ator (channel estim ato r 2). For simplicity, we use th e following notation:
A 4 a 2m . (4.6)
T h e refined error variance for iteration i and bit dk is T he refined channel estim ate h^k
and th e ir error variance A ^ are again saved in th e delay m odule for th e next iteration of
channel estim ation. T hey are also sent to th e tu rb o decoder for th is iteratio n of decoding.
A fter decoding, we have an u p d ated version of th e extrinsic inform ation L^\ {dk). This
inform ation will be fed back to th e channel estim ator 2, th e proposed estim ator, for th e
next iteratio n of channel estim ation. T he whole process will ru n iteratively. In following,
we go into detail to explain th e process of exchanging inform ation betw een th e channel
estim ato r 2 and tu rb o decoding.
T he channel estim ator 2, depending on th e received d a ta bits y k , th e reserved channel
estim ate for d a ta bits together w ith its error variance A^-1 ^ and th e de-interleaved
extrinsic inform ation L^ 2 l\ d k ) , derives th e new channel estim ate of ak and its error
variance
h ^ = K0 y \
4. TU RBO DECODING W IT H IN T E G R A TE D CH ANN EL E STIM A T IO N
Here we assign a* as m atrix 1 and 4 - » as m atrix 2, th e n Kq can be expressed as
(4.8) Vk
K0 = R u R ^ 1,
where subscripts 1 and 2 are for m atrix 1 and 2, respectively. T h e error variance is
E [ \ mk |2] = 2 \ f = R i - R n R'2l R2i.
T he correlation functions are
Rx = E[aka*k] — 2a \
(4.9)
R1 2
i?21
R2
E I ak
E
-2 <(*%)* [2°'a 2 a l ( x skr
E -■A-1) Vi 1 7 i
' 1 2( al + \ % - ])) 2 a l ( x skr
y k J 2a l x k 2(a l \ x k\2 + <7n) _ (4.10)
T h e new channel estim ate and its variance can th en b e expressed as
A )
l + A k 1 +
+
2A( i - l )
1,(0
N n ~x k Vk
0\ (l—1)
1 -L ,r s*
1 + TVo k
(4.11)
(4.12) 1 -I- x(*^0/2_Bg i l l
L + A k (77o' + ^ ) >
In (4.11) and (4.12), we see x k is in th e equation. However, th ey are th e unknown tra n s
m itted d a ta bits. W h a t we have is th e extrinsic inform ation L ^2l\ d k) for th e d a ta bits
from th e last iteration of tu rb o decoding. We assign P r ( d k = 1) = P r ( x sk = + 1) = p,
P r ( d k = 0) = P r { x| = —1) = 1 — p, th e extrinsic inform ation from th e last
iteratio n of decoding will be used as th e a priori inform ation
4. TU RBO DECODING W IT H IN T E G R A T E D CH ANN EL E STIM A T IO N
so we have
exP [L e.2 1](dk)]
1 + e x p [ L ^ {dk )}
T h e p d f of th e tra n sm itte d d a ta bits x sk can be expressed as
f x (x) = p S ( x sk - 1) + ( 1 ~ p ) S ( x sk + 1).
T he m ean value of th e tra n sm itte d d a ta bits x sk can be derived as
f L {e2l\ d k)
E [ xsk] = / x f x {x) dx = 2p — 1 = t a n h( — ---).
(4.14)
(4.15)
(4.16)
We try to approxim ate th e new channel estim ate and its error variance by taking th e
expected value to (4.11) and (4.12) on x sk as follows:
h(i) E xs [hk i' ' (Oi k J
1 4. \
1 + Ak { N o
{ < - »,
+
N0
■ta n h (-
)yt
and
/
x f = E x l [ \(? } = 2 e ,k (Oi L' k
2\(i-i) r ( i - D
1
-1 + ^ - t a n h C ^ V ^ )
(4.17)
(4.18)
V
1 + h ( i T o + I H jNow, we save b o th inform ation in th e delay m odule for th e next iteratio n of channel esti
m ation. At th e sam e tim e, th e refined th e channel estim ate h^k (only th e channel estim ate
for d a ta bits have been refined) are sent to th e preprocessor to derive th e new decision
variables z(■i) .
,(0
°k ~yk{h^k )*. (4.19)
T h e refined error variance A ^ are sent to th e tu rb o decoder to u p d a te th e channel reliability
factor:
4 ° ( 4 ) 4 sfWs
No -a „ A ? ( ~ a 2a + 1 ) + a \ ( 2 E s
(4.20) k \ N o
For th e sake of com parison, we also show th e channel reliability factor L c derived by Frenger,
[1 1]:
4i/ E l
No C o L (\ N +0 1 ) + of