R E S E A R C H
Open Access
Dynamic analysis of a prey–predator
model with state-dependent control strategy
and square root response function
Hongxia Liu
1,2*and Huidong Cheng
1*Correspondence:
[email protected] 1College of Mathematics and
Systems Science, Shandong University of Science and Technology, Qingdao, China 2State Key Laboratory of Mining
Disaster Prevention and Control Co-founded by Shandong Province and the Ministry of Science and Technology, Shandong University of Science and Technology, Qingdao, China
Abstract
In this work, a prey-predator model with square root response function under a state-dependent impulse is proposed. Firstly, according to the differential equation geometry theory and the method of successor function, the existence, uniqueness and attractiveness of the order-1 periodic solution are analyzed. Then the stability of the order-1 periodic solution is discussed by the Poincaré criterion for impulsive differential equations. Finally, we show a specific example and carry out numerical simulations to verify the theoretical results.
MSC: 34C25; 34D20; 92B05; 34A37
Keywords: Semi-continuous dynamic systems; Order-1 periodic solution; Successor functions; Attractiveness
1 Introduction
The herd behavior, such as of drifting herbivores observed in the savanna, is a scenario in which the predator can only interact with the prey along the outer corridor of the prey herd when the prey are attached by the predator. To see the effect of the herd behavior, Brazaet al.[1–5] proposed a square root functional response and in [2], Bachchuet al. considered the following prey–predator system:
⎧ ⎨ ⎩
x(t) =rx(t)(1 –xK(t)) –α√x(t)y(t),
y(t) =y(t)(αβ√x(t) –d), (1)
where the prey population density and the predator population density at timetare de-noted byx(t) andy(t), respectively,r> 0 denotes the intrinsic birth rate wheny≡0,K> 0 refers to the carrying capacity for the prey,α> 0 is the predation coefficient, the conversion coefficient is represented by 0 <β< 1 andd> 0 is the death rate of the predator. Unlike the discussion of the literature [1] as regards the existence of Hopf bifurcations, Bachchuet al. investigated the nonexistence of periodic orbits, and the existence and uniqueness of limit cycles. Then they found the impact of herd behavior mechanism of prey population to the model system analytically. And they also analyzed how herd behavior of prey controls the dynamics of the model system near origin in an ecologically meaningful way.
Herd behavior of the prey makes it difficult for their predators to get food. For a long term in this way, the predator will be endangered, the ecological balance will also be de-stroyed. To avoid such a disaster, intervention has to be made, such as pest management and harvesting of fish [6–15]. Such interventions can be mathematically modeled by im-pulsive systems. Based on (1), Sunet al.[16] introduced the state-dependent impulse strat-egy: when the density of the herbivores reaches the given thresholdh> 0, we will release predators and harvest some herbivores, resulting in
⎧ tigated the existence of order-1 periodic solution due to the limitations of the method they used. In this study, we will apply the method of geometric analysis for impulsive systems to investigate the existence and uniqueness of order-1 periodic solutions, which has not been done in [16].
The rest of the paper is organized as follows. Section 2 provides some basic definitions and lemmas as preparation. In Section 3, according to the differential equation geometry theory and the method of successor function, we analyze the existence and attractiveness of the order-1 periodic solution of system (2). In addition, sufficient conditions of the sta-bility of the order-1 periodic solution is obtained by analogy of the Poincaré criterion. In Section 4, we show a specific example and carry out numerical simulations. Finally, we conclude our work.
2 Preliminaries
Some basic definitions and lemmas are provided in this section which are necessary for the following discussion.
Definition 2.1 ([17]) Consider the general differential equations with state-dependent impulse
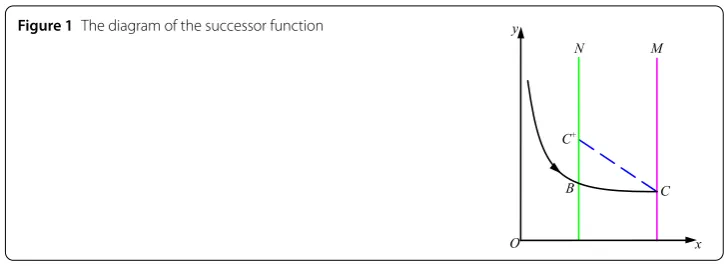
Figure 1The diagram of the successor function
For anyQ∈, the mapQ:R+→defined asQ(t) =(Q,t) is continuous and we callQ(t) the orbit passing through pointQ. The setC+(Q) ={(Q,t)|0≤t< +∞}and
the setC–(Q) ={(Q,t)|–∞<t≤0}is called positive orbit and the negative
semi-orbit of pointQ, respectively. For convenience, ifQ∈–M,g(Q) is called the first point of intersection ofC+(Q) andM. For any pointB∈–N, we define(B) as the first point ofC–(Q) andN.
Remark2.1 Based on system (2), we getM={(x,y)|x=h,y≥0}, N={(x,y)|x= (1 – a)h,y≥0}, for any point (x,y)∈M, whenx=h, we getI: (h,y)∈M→((1 –a)h, (1 +b)y+ c)∈N.
Definition 2.2 ([18]) Assuming that the impulse setMand the phase set N are both
straight lines, as shown in Figure 1. For any pointB∈N, then(B,t) =C∈M,I(C) = C+∈N, we denote the ordinates of pointBandC+ arey
B andyB+, respectively. Then
C+is defined as the successor point ofB, andf(B) =yC+–yBis the successor function of
pointB.
Definition 2.3 ([19]) An orbit (Q0,T) is called order-1 periodic solution with
pe-riod T if there exist a point Q0∈N andT > 0 such thatQ=(Q0,T)∈MandQ+=
I(Q) =Q0.
Lemma 2.1([20]) In system(3),if there exist A∈N,B∈N satisfying the successor function
f(A)f(B) < 0,then there must exist a point S(S∈N)satisfying S between point A and point B such that f(S) = 0,then system(3)has an order-1periodic solution.
Lemma 2.2 ([21, 22], Analogue of the Poincaré criterion) The T -periodic solution
(φ(t),ϕ(t))of the system
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
x(t) =P(x,y),
y(t) =Q(x,y),
⎫ ⎬
⎭ ifη(x,y)= 0,
x(t) =(x,y), y(t) =(x,y),
⎫ ⎬
has orbital asymptotic stability,if the multiplierμ2satisfies the condition|μ2|< 1,where
3 Dynamical analysis of system (2)
In this section, the dynamical properties of the order-1 periodic solution of system (2) are analyzed. Firstly, the qualitative characteristics of system (2) without impulse are dis-cussed. System (2) without impulse is as follows:
⎧
Theorem 3.1 The positive equilibrium E of system(4)is a stable focus if and only if the conditions(H1)and(H2)hold.
Proof The Jacobian matrix at equilibriumEis shown as follows:
J(E) =
the positive equilibriumEis a stable focus. That completes the proof (see Figure 2).
3.1 Existence of order-1 periodic solution of system (2)
On the basis of the ecological significance, system (2) should meet 0 < (1 –a)h<h<K. In this paper, the coordinate of arbitrary pointB∈R+
2is denoted (xB,yB). By Theorem 3.1, we know thex-isolineL1intersectsy-isolineL2at pointE(xE,yE). For differenth, we discuss
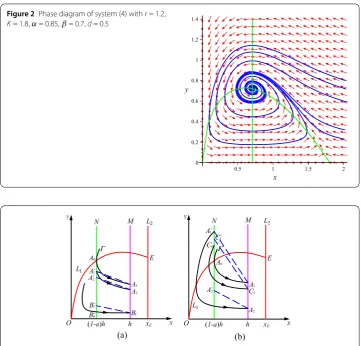
Figure 2Phase diagram of system (4) withr= 1.2, K= 1.8,α= 0.85,β= 0.7,d= 0.5
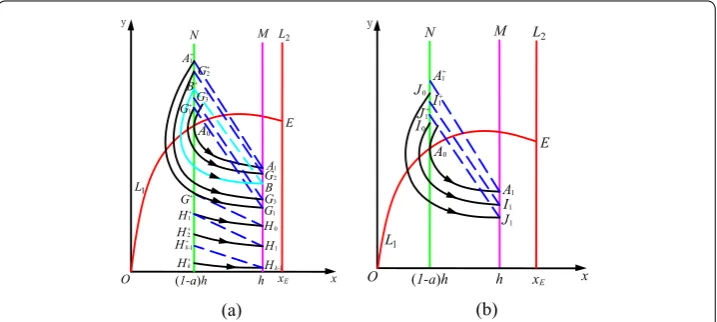
Figure 3The schematic of the existence of the order-1 periodic solution in Case I. (a) Discussion in subcase yA+
1 <yA0. (b) Discussion in subcaseyA+1 >yA0
Case I.0 < (1 –a)h<h≤xE<K.
For notation simplicity, let the intersection of the phase setN and thex-isolineL1be
A0((1 –a)h,yA0). For system (2), there must exist an orbittangent to setNand intersect
with setMat a pointA1(h,yA1), namely,g(A0) =A1, then the pointA1 jumps to a point
A+1((1 –a)h,yA+1)∈N under the action of impulse, whereyA+1 = (1 +b)yA1 +c. Then the
successor function of pointA0isf(A0) =yA+1–yA0. Consider the following three subcases
based on the different position of pointA+ 1.
IfyA+1 =yA0, thenf(A0) = 0, thus the orbitA0A1and segmentA1A0constitute an order-1
periodic solution. IfyA+
1 <yA0, thenf(A0) < 0. Letg(A
+
1) =A2∈M, under the action of impulse,A2jumps
toA+
2∈N. Because any two orbits are disjoint, then we getyA2<yA1 andyA+2 <yA+1, thus
f(A+
1) =yA+2–yA+1 < 0. We can choose another pointB+0((1 –a)h,yB+0)∈N, whereyB+0 =δ∈ (0,c) (δ> 0 is small enough). Letg(B+0) =B1∈MandB1jumps toB+1∈Nunder the action
of impulse, thenyB+
1 = (1 –a)yB1+c>δ. Thus we havef(B
+ 0) =yB+
1 –yB+0 > 0. Then there
exists a pointB∈Nsatisfying 0 <yB<yA+1 such thatf(B) = 0 (see Figure 3(a)).
IfyA+1 >yA0, thenf(A0) > 0. Letg(A+1) =A2∈M, under the action of impulse,A2jumps
to a pointA+2∈N. Because any two orbits are disjoint, then we getyA2<yA1andyA+2 <yA+1,
thusf(A+1) =yA+
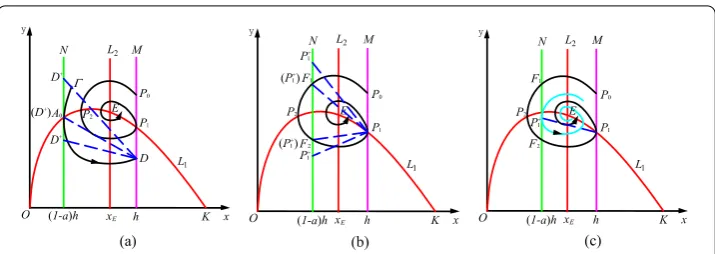
Figure 4The schematic of the existence of the order-1 periodic solution in Case II. (a) Discussion in subcase xP2≥(1 –a)h. (b) Discussion in subcaseyP1+>yF1oryP+1<yF2. (c) Discussion in subcaseyF1<yP+1 <yF2
g(C0) =C1∈Mand under the action of impulse,C1jumps to a pointC1+∈N, thenyC+1 = (1 +b)yC1 +c>δ. Due to any two orbits are disjoint, thenyC1 <yA1 and pointC1is very
close to pointA1, thusyC1+<yA+1 and pointC1+is very close to pointA+1. SinceyA+1 <yA0, we
havef(C0) =yC1+–yC0 > 0. Therefore, there must be a pointB∈A0A
+
1 such thatf(B) = 0
(see Figure 3(b)).
Case II.0 < (1 –a)h<xE<h<K.
Let the impulsive setMintersect isoclineL1at pointP1(h,yP1). The orbit staring from
pointP1 tangents to Mat point P1, and intersects L1 andM at point P2(xP2,yP2) and
P0(h,yP0), respectively.
IfxP2≥(1 –a)h, the orbitpassing throughA0tangents to the phase setNat pointA0,
letg(A0) =D∈M, under the action of impulse, pointDjumps to pointD+∈N. According
to the discussion of Case I, the order-1 periodic solution of system (2) in this subcase is existent (see Figure 4(a)).
IfxP2< (1 –a)h, the orbit passing throughP1intersects setNat pointsF1((1 –a)h,yF1)
andF2((1 –a)h,yF2). AssumeP1jumps toP
+
1((1 –a)h,yP+1)∈Nunder the action of impulse, there are three subcases to be discussed.
IfyP+1 =yF1oryP1+=yF2, then the segmentP1F1and the orbitF1F2P1or the segmentP1F2
and the orbitF2P1constitute an order-1 periodic solution of system (2).
IfyP+1 >yF1 oryP1+<yF2, according to the analysis of Case I, system (2) exists an order-1
periodic solution (see Figure 4(b)).
IfyF1<yP+1 <yF2, due to any two orbits are disjoint, then the orbit passing through point
P+1 tangents to the phase setNat pointP1+, and does not intersect with the impulsive set M, thus the order-1 periodic solution is nonexistent (see Figure 4(c)). The reader can find the detailed proof in reference [23].
We obtain the following theorem by the above discussions.
Theorem 3.2 Suppose the conditions(H1)and(H2)hold.
(I) If0 < (1 –a)h<h≤xE<K,then the order-1periodic solution is existent in system (2).
(II) If0 < (1 –a)h<xE<h<K,there are the following three subcases:
(i) IfxP2≥(1 –a)h,the order-1periodic solution is existent in system(2).
(ii) IfxP2< (1 –a)h,yP+1 ≥yF1 oryP+1 ≤yF2,the order-1periodic solution is existent in system(2).
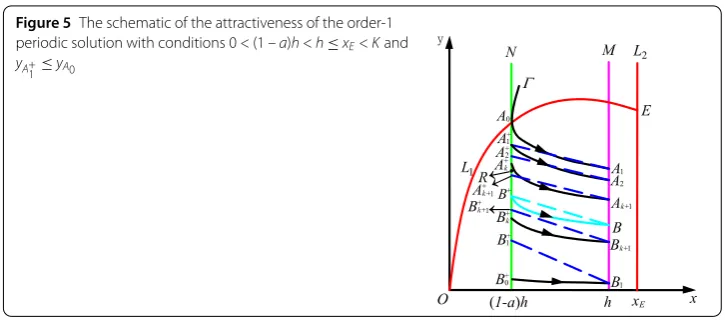
Figure 5The schematic of the attractiveness of the order-1 periodic solution with conditions 0 < (1 –a)h<h≤xE<Kand yA+
1 ≤yA0
3.2 Attractiveness of order-1 periodic solution of system (2)
Based on the conditions of Theorem 3.2, let the initial valuex0<h, the attractiveness of
order-1 periodic solution of system (2) is discussed in this subsection. We mainly discuss Case I, similarly, we can get similar conclusions about Cases II.
Theorem 3.3 If the conditions of 0 < (1 –a)h<h≤xE<K and yA+
1 ≤yA0 hold, and
system(2)exists a unique order-1periodic solution,then the periodic solution in region
1={(x,y)|(x,y)∈R2+,x0<h}is attractive.
Proof Suppose segmentBB+and orbitB+Bconstitute the unique order-1 periodic solution
(see Figure 5).
Firstly, we choose a pointB+
0((1 –a)h,δ)∈N which satisfies δ<candyB+0 <yB+. Let
g(B+
0) =B1∈M, under the action of impulse,B1jumps toB+1∈N, thenyB1<yB, thus we haveyB+1 <yB+. SinceyB+
1 = (1 +b)yB1+c>δ,f(B
+
0) =yB+1–yB+0 > 0. Letg(B+1) =B2∈M, then
B2jumps toB+2∈N. SinceyB0+<yB+1 <yB+, we haveyB
1<yB2<yB, thenyB1+<yB+2 <yB+and
f(B+1) =yB+2 –yB+1 > 0. Repeating the process, then we obtain a sequence{B+i}i=0,1,2,...∈N
such thatyB+0 <yB+1 <· · ·<yB+i <· · ·<yB+ andf(B
+
i) =yB+i+1–yB+i > 0. Thus,{yB+i}i=0,1,2,...is monotonically increasing. Hence,limi→+∞yB+i exists. Next we prove limi→+∞yB+i =yB+.
AssumeB+
∗=limi→+∞B+i, then we proveB+∗=B+. Otherwise,B+∗=B+. Letg(B+∗) =B¯∈M, thenB¯ jumps toB¯+∈N by impulsive effect. Theny¯
B<yB,yB¯+<yB+. Becausef(B+∗)≥0,
B+∗=B+, and the periodic solutionB+BB+is unique,f(B+
∗) =yB¯+–yB+
∗> 0, thusyB+∗<yB¯+<
yB+. Letg(B¯+) =B¯¯ ∈M, thenB¯¯ jumps toB¯¯
+
by impulsive effect. It is easy to know,yB¯ < yB¯¯ <yBandyB¯+<y¯¯
B+<yB+, thenf(B¯
+) =y
¯¯
B+–yB¯+> 0, this is contradictory to the fact that B+∗=limi→+∞B+i, therefore,B+∗=B+andlimi→+∞yB+i =yB+.
On the other hand, according to the analysis of Case I, we knowyB+<yA+
2 <yA+1 <yA0,
yB<yA2 <yA1 andf(A
+ 1) =yA+
2 –yA+1 < 0. Let g(A
+
2) =A3∈M, under the action of
im-pulse, A3 jumps toA+3 ∈N, thenyB+ <yA+
3 <yA+2,f(A
+
2) =yA+3 –yA+2 < 0. Repeat the
pro-cess, we obtain a sequence{A+
k}k=1,2,...∈NsatisfyingyA+1 >yA2+>· · ·>yA+k >· · ·>yS+ and f(A+
k) =yA+k+1–yA+k < 0. Thus,{yA+k}k=1,2,...is monotonically decreasing. Hence,limk→+∞yA+k is existent. Similarly, we can provelimk→+∞yA+k =yB+.
Due to the orbit with arbitrary point of1will intersect withN, next we just prove
ar-bitrary orbit that passes throughNeventually is attracted to the periodic solutionB+BB+.
Choose an arbitrary pointR∈N belowA0 such thatyR∈[yA+
in segment Ak+2Ak+1, then jumps to a point ofN in segmentA+k+2A+k+1, the orbit
con-tinues to move betweenA+
k+1Ak+2andA+k+2Ak+3. Repeat the process indefinitely, because
limk→+∞yA+k =yB+, the intersection sequence of orbit which passes throughRand the
phase setNwill be attracted to pointB+eventually. Similarly, ify
R∈[yB+
i,yB+i+1)i=0,1,2,..., we
also can obtain the intersection sequence of orbit which passes throughRand the phase setNwill be attracted to pointB+eventually. Therefore, the orbit starting from arbitrary
point belowA0eventually is attracted to the periodic solutionB+BB+.
The orbit with arbitrary point aboveA0of the phase setNwill intersect withNat some
point belowA0 as time goes on, similar to the above discussion, the orbit with arbitrary
point aboveA0will be eventually attracted to the periodic solutionB+BB+.
Based on the above analysis, the orbit with arbitrary point ofNwill eventually attracted to periodic solutionB+BB+. Thus, in the region
1, the periodic solutionB+BB+is
attrac-tive. This completes the proof.
See Figure 6(a); let the orbit passing through point A+
1 intersect N at point G+ and
g(G+) =G
1∈M, thenG1jumps to pointG+1∈Nunder the action of the impulse.
Theorem 3.4 If the conditions of0 < (1 –a)h<h≤xE<K and yA0 <yG+1 <yA+1 hold,then system(2)exists a unique order-1periodic solution in region1which is attractive.
Proof We still suppose thatB+BB+is the order-1 periodic solution of system (2). Firstly,
we analyze the uniqueness ofB+BB+.
Select two pointsI0,J0∈A0A+1 such thatyJ0 >yI0 >yA0, the orbits starting from points
J0 andI0, respectively, intersectMatJ1,I1, then jump toJ1+,I1+∈Nunder the action of
impulse, respectively (see Figure 6(b)). Because any two orbits are disjoint, thenyI1>yJ1,
yI1+>yJ1+,f(J0) =yJ1+–yJ0,f(I0) =yI1+–yI0, we getf(J0) –f(I0) = (yJ1+–yI1+) + (yI0–yJ0) < 0, thus,
in the segmentA0A+1, the successor functionf is monotonically decreasing, therefore, for
system (2) there exists a unique pointS+∈A
0A+1 such thatf(B+) = 0.
Next, in the region1, the attractiveness of the periodic solutionB+BB+is proved. See
Figure 6(a), Letg(G+1) =G2∈M, thenG2jumps to pointG+2∈N. In view of any two orbits
Figure 6The schematic of the attractiveness of the order-1 periodic solution with conditions 0 < (1 –a)h<h≤xE<KandyA0<yG+
are disjoint andyA0<yG+1 <yA+1, thenyG1<yG2<yA1,yG+1 <yG+2<yA+1. Letg(G
+
2) =G3∈M,
thenG3jumps to pointG+3∈N, we haveyG1 <yG3 <yG2,yG1+<yG+3 <yG+2. Repeating the steps, we obtain two sequences{Gk}k=1,2,...∈Mand{G+k}k=1,2,...∈NsatisfyingyG+1 <· · ·< yG+2k–1 <yG+2k+1<· · ·<yG+2k <yG+2k–2 <yG+2, thenf(G
+
2k–1) =yG+2k –yG+2k–1> 0, andf(G+2k) = yG+2k+1–yG+2k< 0. By the proof of Theorem 3.3, we getlimk→+∞yG+2k–1=limk→+∞yG+2k=yB+.
The orbit with arbitrary point in segmentA+1G+will intersectNas time goes on,
un-der the action of impulses, it passes through a point in segmentG+
2k–1G+2k+1orG+2kG+2k–2,
hereG+0=A+1. Similar to the discussion of Theorem 3.3, the orbit with arbitrary point in segmentA+
1G+will be eventually attracted to the periodic solutionB+BB+.
Assume a pointH0∈Mjumps to pointG+∈Nunder the action of impulse. Let(H0) =
H1+. Assume a pointH1∈Mjumps to pointH1+∈N under the action of impulse. Let
(H1) =H2+. Repeat the process until the phase set Nexists a HK+0 (K0∈Z+) such that
yH+K
0 <c. Then there are two sequences{Hk}k=1,2,...K0–1 ∈Mand{H
+
k}k=1,2,...K0 ∈N such
that(Hk–1) =Hk+,yH+k <yH+k–1, hereH0+=G+. For arbitrary point ofNbelowG+, it must
in segmentHk+Hk++1, wherek= 1, 2, . . . ,K0andyH+k+1= 0. Underk+ 1 times the impulsive action, the orbit with arbitrary point that belowG+ will passes through some point of
segmentA+
1G+and will be attracted to the periodic solutionB+BB+eventually. Thus, the
order-1 periodic solution with the initial point that belowG+is nonexistent. The orbit with arbitrary point aboveA+
1 ofNwill intersect withNat some point below
G+as time goes on, then the orbit will be attracted to the periodic solutionB+BB+. Thus,
the order-1 periodic solution with the initial point that aboveA+1 is nonexistent.
Based on the above analysis, system (2) exists a unique order-1 periodic solution which
is attractive. That completes the proof.
Like by the discussions of Theorem 3.3 and Theorem 3.4, we find the following.
Theorem 3.5 If0 < (1–a)h<xE<h<K,xP2≥(1–a)h and yD+≤yA0,and system(2)exists
a unique order-1periodic solution,then the periodic solution in region2 is attractive,
where2=R+–Q1 and Q1 is an open region enclosed by orbitP0P2P1(see Figure4(a)).
Meanwhile if yD+>yA
0,then for system(2)there exists a unique order-1periodic solution
in region2which is attractive.
Theorem 3.6 If (ii)of IIin Theorem3.2is true, and yP1+≤yF2 and system(2)exists a
unique order-1periodic solution,then the periodic solution in region3is attractive,where
3=R+–Q2and Q2is an open region enclosed by orbitP0F1F2P1(see Figure4(b)).And if
yP+1 >yF2,then for system(2)also there exists a unique order-1periodic solution in region 3which is attractive.
3.3 Stability of order-1 periodic solution of system (2)
Theorem 3.7 Denote(φ(t),ϕ(t))as a T -periodic solution in system(2),andφ0=φ(0),
ϕ0=ϕ(0).Under the conditions of Theorem3.2,if
[r(1 –a)h(1 –(1–Ka)h) –α √
(1 –a)hϕ0](ϕ0–c)
[rh(1 –Kh) –α√h·ϕ0–c
1+b](1 –a)ϕ0
< 1,
Proof It is easy to see thatφ1=φ(T) =h,ϕ1=ϕ(T);φ+1=φ(T+),ϕ1+=ϕ(T+), then
Therefore,|μ2|< 1, and by Lemma 2.2, system (2) has a stable order-1 periodic solution.
4 Simulations and conclusion
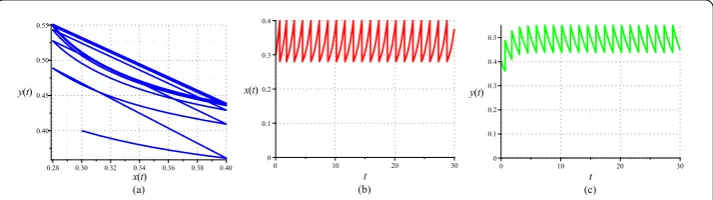
Figure 7Numerical simulations in Case I. (a) Phase portrait ofx(t) andy(t) onh= 0.4. (b) Time series ofx(t). (c) Time series ofy(t)
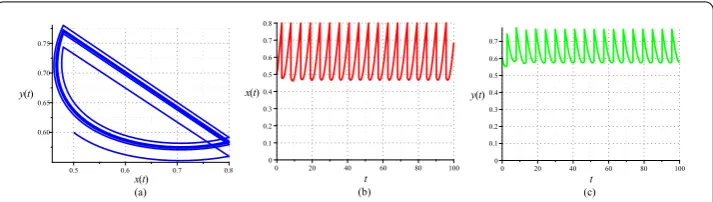
Figure 8Numerical simulations in Case I. (a) Phase portrait ofx(t) andy(t) onh= 0.65. (b) Time series ofx(t). (c) Time series ofy(t)
have
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
x(t) = 1.2x(t)(1 –x1.8(t)) – 0.85√x(t)y(t), y(t) =y(t)(0.595√x(t) – 0.5),
⎫ ⎬ ⎭ x=h,
x(t) = –ax(t),
y(t) =by(t) +c,
⎫ ⎬ ⎭ x=h.
(6)
Leth= 0.4,a= 0.3,b= –0.2 andc= 0.2 satisfy the condition 0 < (1 –a)h<h<xE<K, and the initial value is (0.3, 0.4) satisfyingx0<h. Figure 7 indicates that for system (6)
there exists an order-1 periodic solution which is stable, and arbitrary orbit of system (6) is attracted to the periodic solution.
Leth= 0.65,a= 0.2,b= 0.1 andc= 0.09 satisfy the condition 0 < (1 –a)h<h<xE<K and the initial value be (0.5, 0.5). Figure 8 illustrates that for system (6) there exists a stable order-1 periodic solution, and an arbitrary orbit of system (6) is attracted to the periodic solution.
so-Figure 9Numerical simulations in Case II. (a) Phase portrait ofx(t) andy(t) onh= 0.8. (b) Time series ofx(t). (c) Time series ofy(t)
lution. Furthermore, we prove order-1 periodic solution is stable under certain condi-tions. Numerical simulations with an example are carried out which illustrate that the state-dependent impulse control strategy is effective. Compared with the literature [16], our research is more comprehensive, which is an improvement and complement for the results of the above literature.
Acknowledgements
The paper was supported by supported by the National Natural Science Foundation of China (No. 11371230).
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Received: 23 October 2017 Accepted: 27 January 2018 References
1. Braza, P.A.: Predator–prey dynamics with square root functional responses. Nonlinear Anal., Real World Appl.13(4), 1837–1843 (2012)
2. Sk, B., Alam, S.: A dynamics of a prey–predator model with defence mechanism for prey. Int. J. Adv. Appl. Math. Mech.
4(3), 55–59 (2017)
3. Matia, S.N., Alam, S.: Prey–predator dynamics under herd behavior of prey. Univers. J. Appl. Math.1(4), 251–257 (2013) 4. Gimmelli, G., Kooi, B.W., Venturino, E.: Ecoepidemic models with prey group defense and feeding saturation. Ecol.
Complex.22, 50–58 (2015)
5. Banerjee, M., Kooi, B.W., Venturino, E.: An ecoepidemic model with prey herd behavior and predator feeding saturation response on both healthy and diseased prey. Math. Model. Nat. Phenom.12(2), 133–161 (2017) 6. Cheng, H., Wang, F., Zhang, T.: Multi-state dependent impulsive control for Holling I predator–prey model. Discrete
Dyn. Nat. Soc.2012(12), 30–44 (2012)
7. Sun, K., Zhang, T., Tian, Y.: Dynamics analysis and control optimization of a pest management predator–prey model with an integrated control strategy. Appl. Math. Comput.292, 253–271 (2017)
8. Zhang, S., Meng, X., Feng, T., Zhang, T.: Dynamics analysis and numerical simulations of a stochastic non-autonomous predator–prey system with impulsive effects. Nonlinear Anal. Hybrid Syst.26, 19–37 (2017)
9. Cheng, H., Wang, F., Zhang, T.: Multi-state dependent impulsive control for pest management. J. Appl. Math.2012, Article ID 381503 (2012)
10. Meng, X., Zhang, L.: Evolutionary dynamics in a Lotka–Volterra competition model with impulsive periodic disturbance. Math. Methods Appl. Sci.39(2), 177–188 (2016)
11. Zhang, T., Ma, W., Meng, X.: Global dynamics of a delayed chemostat model with harvest by impulsive flocculant input. Adv. Differ. Equ.2017(1), 115 (2017)
12. Liu, Q., Huang, L., Chen, L.: A pest management model with state feedback control. Adv. Differ. Equ.2016(1), 292 (2016)
13. Tian, Y., Zhang, T., Sun, K.: Dynamics analysis of a pest management prey–predator model by means of interval state monitoring and control. Nonlinear Anal. Hybrid Syst.23, 122–141 (2017)
14. Liu, L., Meng, X.: Optimal harvesting control and dynamics of two-species stochastic model with delays. Adv. Differ. Equ.2017(1), 18 (2017)
16. Sun, S., Guo, C., Qin, C.: Dynamic behaviors of a modified predator–prey model with state-dependent impulsive effects. Adv. Differ. Equ.2016(1), 50 (2016)
17. Chen, L.: Pest control and geometric theory of semi-continuous dynamical system. J. Beihua Univ. Nat. Sci.12(1), 1–9 (2011)
18. Zhang, T., Ma, W., Meng, X., Zhang, T.: Periodic solution of a prey–predator model with nonlinear state feedback control. Appl. Math. Comput.266, 95–107 (2015)
19. Liu, B., Tian, Y., Kang, B.: Dynamics on a Holling II predator–prey model with state-dependent impulsive control. Int. J. Biomath.5(3), 675 (2012)
20. Zhang, T., Meng, X., Liu, R., Zhang, T.: Periodic solution of a pest management Gompertz model with impulsive state feedback control. Nonlinear Dyn.78(2), 921–938 (2014)
21. Zhao, W., Liu, Y., Zhang, T., Meng, X.: Geometric analysis of an integrated pest management model including two state impulses. Abstr. Appl. Anal.2014(1), 91506 (2014)
22. Zhang, T., Zhang, J., Meng, X., Zhang, T.: Geometric analysis of a pest management model with Holling’s type III functional response and nonlinear state feedback control. Nonlinear Dyn.84(3), 1529–1539 (2016)