ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
Non Linear Model Predictive Control
Strategies for Hybrid Renewable Energy
Source
Arul Rexlin P1, Kavitha D2
PG Scholar, Dept of EEE, Arignar Anna Institute of Science and Technology, Chennai, India1
Assistant Professor, Dept of EEE, Arignar Anna Institute of Science and Technology, Chennai, India2
ABSTRACT: In today’s world, due to the growing demands of technology and rise in population, there has been a tremendous pressure on the electricity demands. The world needs to find alternative sources of energy. Hence renewable sources are being considered to meet the growing demands of energy. Renewable energy sources hybrid including photovoltaic cells , wind turbines and Battery’s require converters with high voltage gain in order to interface with power transmission and distribution networks. These conversions are conventionally made using bulky, complex, and costly transformers. Multiple modules of single-switch, single-inductor DC-DC converters can serve these high-gain applications while eliminating the transformer. The gain and efficiency of both series and cascade configurations are investigated analytically, and a method is introduced to determine the maximum achievable gain at a given efficiency. Simulations are used to verify the modeling approach and predict the performance at different power levels. This work comprises developing an EMS that dynamically optimizes the operation of stand-alone dc micro grids, consisting of wind, photovoltaic (PV), and battery branches, and coordinately manage all energy flows in order to achieve four control objectives: i) regulating dc bus voltage level of micro grids ii) proportional power sharing between generators as a local droop control realization; iii) charging batteries as close to IU regime as possible; and iv) tracking MPPs of wind and PV branches during their normal operations. Non-linear model predictive control (NMPC) strategies are inherently multivariable and handle constraints and delays. In this project, the above mentioned EMS is developed as a NMPC strategy to extract the optimal control signals, which are duty cycles of three DC-DC converters and pitch angle of a wind turbine. Due to bimodal operation and discontinuous differential states of batteries, microgrids belong to the class of hybrid dynamical systems.
I. INTRODUCTION
Micro grids are new key elements of modern power grids that improve the grids capability of hosting renewable energy and distributed storage systems. In fact, in the near future, distribution networks will consist of several interconnected micro grids that will locally generate, consume, and even store energy. Micro grids may operate as an extension of the main grid, i.e. the grid-connected mode, or as a stand-alone network with no connection to the grid. Stand-alone sustainable micro grids have some distinct applications in avionic, automotive, or marine industries, as well as in remote rural areas. In such stand-alone micro grids, intermittent solar and wind energies coupling with battery storages contributes realistic sources to supply variable load demands. However, comparing to the grid-connected micro grids, three well-known issues regarding voltage regulation, power sharing, and battery management, are more severe in stand-alone micro grids leading to the necessity of more sophisticated control strategies.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
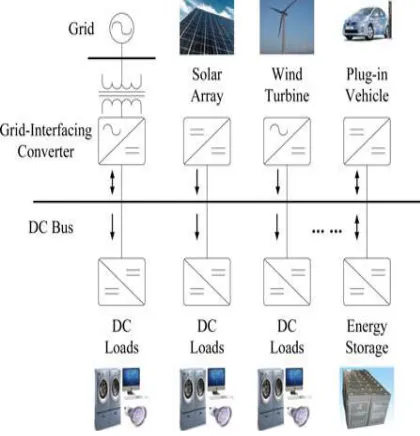
branches which are connected to a dc bus through dc-coupled structures, i.e. via dc-dc converters. The microgrid supplies a variable linear dc load which is connected directly to the grid bus. From Figure 1.1, it can be seen that the presented dc microgrid is controlled by four manipulated variables, i.e. the wind turbine pitch angle and switching duty cycles of three different dc-dc converters. While increasing the wind turbine pitch angle promotes pitching to feather, the operating points of PMSG, PV, and battery bank can be changed by varying dc-dc converters duty cycles.
Figure 1.1 Topology of stand-alone green micro grids
Wind turbines (WTs) convert the kinetic energy of wind to mechanical power .The performance of a WT can be characterized with three different curves, namely, power, torque, and thrust coefficient curves. These curves are normally plotted in terms of tip speed ratio, which is defined as a weighted ratio of the rotational speed to wind speed, for different values of pitch angle. Figure 1.2 illustrates the optimum value of tip speed ratio at which the power coefficient, Cp, is maximized. According to the Lancaster-Betz theory, the upper bound of power coefficient, i.e. Cp max, is 0:593. Modern wind turbines provide the maximum power coefficient of around 0.48. Regarding the rotational speed, a WT operation can be classified into either constant speed or variable speed. The variable speed WT op eration, which requires employing power converters, is more attractive, principally due to its ability to harvest the maximum power at variable wind speeds. In order to generate the maximum power by a WT at variable wind speed, it is necessary to employ a maximum power point tracking (MPPT) control strategy.
A wind turbine can be connected to an electrical generator directly or through a gear-box. The former case, which is called direct-drive, provides some advantages in terms of high reliability and is more popular for small-scale wind turbines. To deliver power in direct-drive topology, which operates at low rotational speed, it requires employing multi-pole generators. In spite of high cost, PMSGs are the most dominant type of direct-drive generators in the market, due to several advantages such as higher efficiency.
In order to convert the three-phase output of a PMSG to dc voltage, it is essential to deploy a three-phase rectifier. A general structure, which consists of a full-bridge diode rectifier connected in series to a dc-dc converter, is common, due to lower cost. Figure 1.3 illustrates the electrical circuit of a full-bridge three-phase rectifier where It is the equivalent dc current of dc side. Due to the inductance Ls available on ac side, there is non-instantaneous current commutation.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
types of dc-dc converters. While a boost-type converter, as given in provides lower voltage than the input voltage. Unlike the boost and buck converters which dictate the instantaneous current flow to be unidirectional, Figure 1.4c shows a bi-directional converter. In such a converter a complementary control signal allows the current to flow in either direction.
A state-space averaging approach to model a dc-dc converter is proposed in. It suggests two states, Il and Vc for the continuous conduction mode (CCM) in which the instantaneous inductor current, Il, is always greater than zero. According to the proposed approach, there is a set of two distinct state-space systems to model two states of switch operation and the overall state-space model of the converter is a weighted average of these two models. The weighting factor is the duration of time that converter remains in each state. While state-space averaging approach is simple to analyze and implement, it does not model the hybrid nature of converters. One-level dc-dc converters given in Figure1.4 work in two different modes of operation with respect to the value of discrete state Sd . Defining the same state vector as above, i.e. XT= [Il Vc]T , dc-dc converters can be modelled as hybrid systems. It presents an affine state space model coupled with a linear output equation for each modes of operation.
PVs are among the popular renewable energy components to harvest solar energy. A PV cell, as the fundamental PV element, is a P-N junction that converts solar irradiance to the electrical energy. Normally, manufacturers provide PV modules, also known as PV panels, which consist of several PV cells connected together in series.
There are different types of batteries applicable to the backup/storage purposes across micro grids. Different battery technologies are comprehensively reviewed and compared in for the renewable energy applications. They suggest that lead acid batteries have some advantages for hybrid renewable energy system (HRES) applications. Lead-acid batteries are widely available in many sizes and are appropriate for small to large applications. Furthermore, the normalized cost of this type of batteries is reasonable and it is mature in concepts, mathematical model and technology. In fact, the performance characteristics of lead-acid batteries are well understood and modelled. Batteries operate in different modes.
II. ENERGY MANAGEMENT STRATEGIES
During the past decade, a number of researchers conducted their activities towards solving different energy management problems. An energy management strategy specifies the control problem of optimally managing energy flows, with respect to one or more constraint(s), to assure continuous supply of load demand in a power system. The constraints can be economical and technical limitations. The resulting controllers can be assumed as outer controllers that continuously extract the optimum set points which are then applied to some inner controllers such as a pitch angle controller of a wind turbine. To the best knowledge of the author, prior power engineering researches cover a wide range of energy management problems in two main directions: i) grid-connected or stand-alone micro grids; and ii) hybrid or pure electrical vehicles (HEV/EV). However, researches from different backgrounds use different terminologies. In the field of HEV/EV the words energy management system (or strategy) (EMS), power control strategy, and power management system are more common. On the other hand, researchers in the field of power grids use the words dispatch strategy, energy management system (or strategy) and power management strategy. The term supervisory control is also common to refer outer level control laws like energy management strategies. In this research the term energy management strategy has been chosen to indicate the employed control law. An energy management problem consists of a number of sub-problems, including battery management, load and energy resources prediction, system and constraints modelling, fast system simulation as well as appropriate control technologies, to name a few. There are a number of prior researches focused on modelling uncertainty of renewable energy resources. These models are mostly based on stochastic analysis leading to probability distribution functions (PDFs) of hourly solar irradiance and wind speed. These models are essential to simulate energy resources and are applicable to design a reliable renewable site. Moreover, predictions of the available energy resources for some time ahead is vital for probable employing of predictive controllers to manage the energy production and consumption Several researchers conducted their research to model different involved components to understand dynamical behaviours of a system.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
components in both micro grids and EVs, principally due to their high cost of replacement which is highly dependent on the charging and discharging methods. Therefore, it is essential to implement a proper battery management strategy as part of any EMS. The researches in have introduced implementations of different battery management strategies as standalone systems. Moreover, the works in have provided battery management strategies as a part of the developed EMSs.
A number of prior works presented different control techniques to implement EMSs. Some of these strategies are developed by employing conventional control technique. Optimal control techniques have become popular recently to solve energy management problems, mainly due to handling constraints and the recent advances in relevant numerical solvers.
Through this study, it is shown that the energy management problem of a standalone sustainable micro grid can be formulated as an optimal control problem which can be solved by employing non-linear model predictive control (NMPC) technique. Figure 1.10 summarizes the presented optimal EMS in this study from energy, control theories, and involved mathematical concepts perspectives.
Optimal control problems (OCPs) make explicit use of the system model in order to find an optimal control law subject to system dynamics and a set of equality and inequality constraints. The term optimal here is defined with respect to certain criteria implying the control objectives.
Figure 1.2 An outline of the presented EMS from different perspectives.
These criteria are specified with a cost functional J, consisting of Lagrangian term L, also known as the stage cost that penalizes a distance to the time varying reference trajectory during the prediction period. It is important to note that an OCP is different from a normal static non-linear optimization problem in terms of existent dynamics (ordinary or partial differential equations) among its constraints.
It takes OCPs member of the class of dynamic optimization problems. Briefly, it means that the optimum solution of a problem at each sampling instant should optimize trajectories of the system for the infinite future horizon instead of only that specific moment.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
stabilizes a closed-loop system. In order to make the resulting closed loop system stable, the stage cost requires being modified by adding a penalty terms to it, and adding equality or inequality constraints on feasible states, as given in the below equation.
While the terminal penalty term M indicates the cost of state deviations from the desired final values, the term shows terminal region constraint. Both freely chosen M and are determined suitably in an off-line manner in order to guarantee the stability of the closed-loop system.
They can be such that the new cost functions in gives an upper approximation of the original infinite horizon cost functional. In order to find the upper approximation of the infinite horizon cost functional, it can be split into two segments:
Although it is not possible to find an upper approximation for general non-linear systems, if there is a terminal region around origin within which trajectories of the closed-loop system remain for a time interval of [t + T;1], then it is possible to find an upper bound on the second term. This upper approximation of the second term can then be used as the terminal penalty given by term M. It is important to note that though adding terminal penalty cost is very effective to obtain stability and feasibility of NMPC problems, it is not a necessary condition. There are new advances to stabilize NMPC problems without adding terminal constraints to the original problem .NMPC, also known as non-linear receding horizon control (RHC), repeatedly solves on-line a finite horizon version of an OCP in order to obtain the optimum control signals at each sampling instant . NMPCs are digital control strategies which are based on discrete finite-horizon OCPs. The period of time T is divisded into N equal or non-equal length samples with the duration of h = T.N in which the control variables are assumed to be constant Optimizer, a cost function, as well as a number of constraints.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
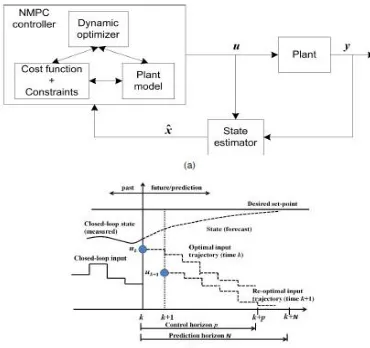
It also relies on, as part of the relevant OCP, a model of the plant to predict its behaviour. The current values of the plant internal states, ^x, need to be measured or estimated at k and applied to NMPC as their initial values. At any sampling instant k, controller calculates the optimum input trajectory u_(:) for a finite prediction horizon T = N _h where h is the sampling length. The optimum input trajectory is calculated such that a cost function, e.g. the required time for the closed-loop states to reach desired set-points or the maximum level of overshoots, is minimized. Due to both model and real plant mismatch, as well as measurement disturbances, the predicted and real system behaviours are different and therefore it needs to employ a feed-back mechanism. Controller uses current plant measurements as initial values at k, constructs an OCP and solves it to obtain the optimum open-loop manipulated control signals u(:). The first p, where usually equals to 1, obtained control signals are then applied to the plant such that the next measurement becomes available at (k+p)h . Using new measurements at (k +p)h, controller repeats the procedure with the prediction and control horizons moving forward in order to find a new control law for the next step. It can be seen that manipulated closed loop control signals are discretized as piecewise constant values during the sampling length h. Unlike conventional causal controllers which use previously computed control laws, NMPC is an acausal technique that computes current control law based on the next N-step ahead predictions of the plant behaviour. Comparing with conventional methods, NMPC, as a non-linear control strategy, presents several advantages. Due to the existent constraints like actuators limitations, safety limits, and pressure or velocity paths to name but a few, steady-state operation of the plant is normally very close to boundaries of the set of feasible steady-states which is not easy to maintain with conventional control methods; however, NMPC is an inherently non-linear and multivariable strategy that handles constraints and delays.
III. HYBRID ENERGY MODEL
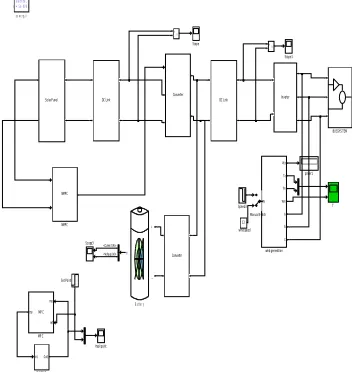
The standalone dc micro grid in Fig 3.1is a small-scale micro grid for remote applications. The wind turbine operates at variable speeds and is connected to the electrical generator directly,i.e., the direct-drive coupling. The variable speed operation is more flexible for the power management and MPPT applications. Furthermore, direct-drive coupling is more efficient and reliable and is more popular for small-scale wind turbines. In spite of high cost, permanent magnet synchronous generators (PMSGs) are the most dominant type of direct-drive generators in the market, chiefly due to higher efficiency. It can be seen that battery bank is connected to the dc bus through a dc-coupled structure, i.e., via a dc-dc converter, which is more flexible in terms of implementing different charging and discharging regimes despite more power losses.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
Performance of the wind turbines is measured as the power coefficient curve with respect to the tip speed ratio and pitch angle. Equation shows the power coefficient curve of three-blade wind turbines
Energy management strategies of microgrids must estimate the dc bus voltage level deviation from its set point in about every 5–10 s . It means that except the angular velocity of the generator all other fast voltage and current dynamics can be ignored. It is also assumed that there is no mechanical and electrical losses through the power train and therefore the electromagnetic power given by is equal to the output electrical power of the wind branch.
OCPs are open-loop strategies and are wrapped by a feedback loop to construct NMPC strategies. NMPC strategies, which are also called as the receding horizon control, continuously solve an OCP over a finite-horizon using the measurements obtained at as the initial values. Then the first optimal value is applied as the next control signal. Comparing with the conventional methods, NMPCs are inherently nonlinear and multivariable strategies that handle constraints and delays.
There are three different techniques to discretize and solve OCPs of 1) dynamic programming method based on the Bellman's optimality principle; 2) indirect method based on the Pontryagin minimum principle; and 3) direct methods that convert OCPs into nonlinear optimization problems (NLPs) which are then solved by NLP solvers. In this project, a direct method, named collocation discretization , is developed in CasADi environment.
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
Fig. 1.5 Simplified view of the dc micro grid and the developed NMPC controller
IV. SIMULATION RESULT
Once the battery terminal voltage reaches the gassing voltage, the charging current should be gradually reduced in order to maintain the voltage below the gassing level and fully charge the battery without the risk of permanent damage. For this purpose the cost function of the developed NMPC strategy is switched.
wi nd speed
Ws W p
Te
Tm
Wm
A
B
C
wind generati on
track point Sol ar P anel
Discrete , Ts = 5e-006 s.
po wergu i
power1 DC Link
v + -v
+
-T Converter
DC Link Inverter Converter
Speed3
Set Poi nt Scope3
Scope1 Scope
NMPC NMPC
Manual S witch
MP C mv
mo ref MP C
In1Out1
DC GRID
12
+
_ m
Battery
BUSSYS TEM
<Current (A)>
<Voltage (V)>
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
2 current1 1 current 2 -1 + V +
-Vol tage S ensor
v + -Voltage Me asur em ent
f(x)=0
Sol ver Confi gurati on
S cope2 S cope1
P roduct
+
-PV Pannel5
+
-P V -P annel 4
+
-P V -P annel 3
+
-PV Pannel2
+
-P V -P annel 1
+
-P V -Pannel
PS
S PS-Si mul ink Converter
E lectri cal Ref erence
i
+ -Cur re nt Me asur em ent
I + -Current S ensor s -+ Controlled Curr ent Source R
Figure 1.7 PV Array Energy Model
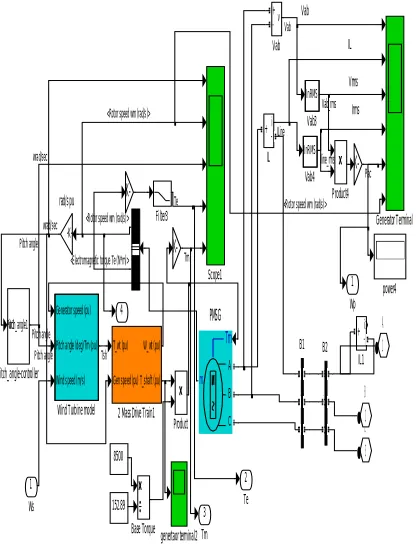
Vab IL Vrms Irms 4 Wm 3 Tm 2 Te 1 Wp 3 C 2 B 1 A -K-rad/s pu power4 genertaor terminal2
Generator speed (pu)
Pitch angle (deg)
Wind speed (m/s) Tm (pu)
Wind Turbine model
InRMS Vab4 InRMS Vab3 v + -Vab Scope1 Product4 Product wr1 Pitch_angle1
Pitch_angle-controller m A
B C Tm PMSG i + -IL1 i + -IL Generator Terminal Filter3 152.89 8500 Base Torque A B C a b c B2 A B C a b c B1 T_wt (pu)
Gen speed (pu) W_wt (pu)
T_shaft (pu)
2 Mass Drive Train1
-K-1 Ws
<Rotor speed wm (rad/s)> <Rotor speed wm (rad/s)>
<Rotor speed wm (rad/s)> wrad/sec wrad/sec Vab ILine Tm Vab_rms Iline_rms Pac Te Pitch angle Pitch angle Pitch angle
<Electromagnetic torque Te (N*m)>
Tsh
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
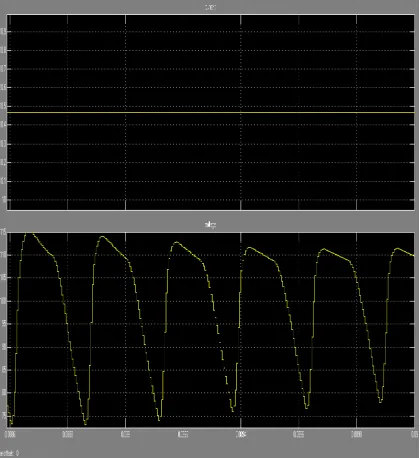
Figure 1.9 input voltage and output voltage of DCtoDC converter
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
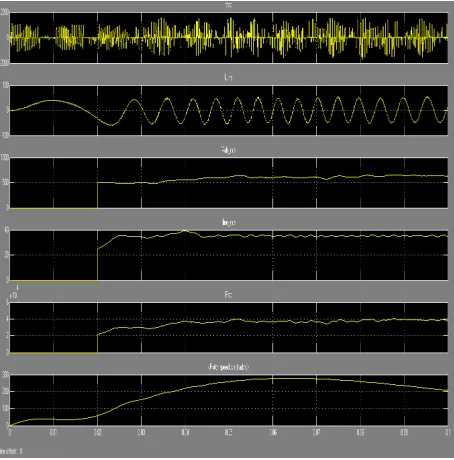
Figure 1.11 Inverter phase voltage
Figure 1.12 Wind output characteristic
V. CONCLUSION
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710
I
nternational
J
ournal of
I
nnovative
R
esearch in
S
cience,
E
ngineering and
T
echnology
(An ISO 3297: 2007 Certified Organization)
Vol. 5, Issue 3, March 2016
strategies are non-linear multivariable optimal control problems. This report work involved formulating such the optimal control problems and developing non-linear model predictive control strategies to optimally manage energy flows across stand-alone dc micro grids.
REFERENCES
[1] J. M. Guerrero, M. Chandorkar, T. Lee, and P. C. Loh, “Advanced ControlArchitectures for Intelligent Microgrids–Part I: Decentralized and Hierarchical Control,” Industrial Electronics, IEEE Transactions on, vol. 60, no. 4, pp. 1254–1262, 2013.
[2] P. Nema, R. K. Nema, and S. Rangnekar, “A current and future state of art development of hybrid energy system using wind and PV-solar: A review,”Renewable and Sustainable Energy Reviews, vol. 13, no. 8, pp. 2096 – 2103,2009.
[3] R. S. Balog, W. W. Weaver, and P. T. Krein, “The Load as an Energy Asset ina Distributed DC SmartGrid Architecture,” Smart Grid, IEEE Transactions on,vol. 3, no. 1, pp. 253–260, 2012.
[4] D. Chen, and L. Xu, “Autonomous DC Voltage Control of a DC Microgrid With Multiple Slack Terminals,” Power Systems, IEEE Transactions on, vol. 27,no. 4, pp. 1897–1905, 2012.
[5] S. Anand, B. G. Fernandes, and M. Guerrero, “Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low-Voltage DC Microgrids,” Power Electronics, IEEE Transactions on, vol. 28, no. 4,pp. 1900–1913, 2013.
[6] J. M. Guerrero, P. C. Loh, T. L. Lee, and M. Chandorkar, “Advanced Control Architectures for Intelligent Microgrids–Part II: Power Quality, Energy Storage,and AC/DC Microgrids,” Industrial Electronics, IEEE Transactions on, vol. 60,no. 4, pp. 1263–1270, 2013.146
[7] N. Eghtedarpour, and E. Farjah, “Control strategy for distributed integrationof photovoltaic and energy storage systems in DC micro-grids,” Renewable Energy, vol. 45,no. 0, pp. 96 – 110, 2012.
[8] X. Yu, and H. Qu, “Wind power in China–Opportunity goes with challenge,”Renewable and Sustainable Energy Reviews, vol. 14, no. 8, pp. 2232 – 2237,2010.
[9] T. Burton, N. Jenkins, D. Sharpe, and E. Bossanyi, Wind Energy Handbook.West Sussex, UK: John Wiley & Sons, 2 ed., 2011.
[10] A. Meharrar, M. Tioursi, M. Hatti, and A. B. Stambouli, “A variable speed wind generator maximum power tracking based on adaptative neuro-fuzzy inference system,” Expert Systems with Applications, vol. 38, no. 6, pp. 7659 –7664, 2011.
[11] C. T. Pan, and Y. L. Juan, “A Novel Sensorless MPPT Controller for a High-Efficiency Microscale Wind Power Generation System,” Energy Conversion,IEEE Transactions on, vol. 25, pp. 207 –216, march 2010.
[12] H. Li, and Z. Chen, “Overview of different wind generator systems and their comparisons,” Renewable Power Generation, vol. 2, no. 2, pp. 123–138, 2008.
[13] N. Mohan, T. M. Undeland, and W. P. Robbins, Power electronics: converters, applications, and design. New York: John Wiley & Sons, 2 ed., 1995.
[14] J. H. Su, J. J. Chen, and D. S. Wu, “Learning Feedback Controller Design of Switching Converters Via MATLABSIMULINK,” IEEE Transactions on Education,vol. 45, pp. 307–315, 2002.