A First Step towards Occlusion Culling in OpenSG PLUS
Dirk StanekerWSI/GRIS, University of T¨ubingen, Germany
Abstract
The fast increasing size of datasets in scientific computing, mecha-nical engineering, or virtual medicine is quickly exceeding the gra-phics capabilities of modern computers. Toolkits for the large mo-del visualization address this problem by combining efficient geo-metric techniques, such as occlusion and visibility culling, mesh reduction, and efficient rendering. OpenSG PLUS is such a toolkit with support for large models.
In this paper, we present three techniques for occlusion culling in OpenSG PLUS. The first technique uses the z-buffer to determi-ne the visibility of a bounding box. The second technique uses the stencil-buffer to get visibility information and the third technique exploits the HP Occlusion Culling Flag. All three techniques are conservative and work on arbitrary scenes without any geometric or topological assumptions.
CR Categories: I.3.3 [Picture/Image Generation]: Viewing Algo-rithms, Occlusion Culling; I.3.4 [Graphics Utilities]: Application Packages, Graphics Packages; I.3.7 [Three-Dimensional Graphics and Realism]: Hidden Line/Surface Removal;
Keywords: Large Model Visualization, Toolkit, Visibility and oc-clusion culling.
1
INTRODUCTION
The datasets for visualization are growing faster than the rendering speed of modern graphics subsystems. Several techniques exist to solve this problem, most of them reduce the number of polygons, others use sampling techniques like ray tracing or point sampling. To reduce the number of polygons level-of-detail [Gar99] or im-postor techniques are used. Another approach is occlusion culling. Hereby hidden parts of a scene are detected and excluded from the rendering process. In this paper, three different occlusion culling techniques for OpenSG PLUS will be presented.
OpenSG [OSG00] is a portable scene graph programming toolkit which has been started in 1999, with the focus on real time rende-ring. With the OpenSG PLUS project, OpenSG will be enhanced with Large Scene Support, High Level Primitives and High Level Shading. The presented occlusion culling techniques are part of the Large Scene Support.
This paper is organized as follows; the next section briefly re-views related toolkits for visualization and other occlusion culling techniques. Section 2 describes, how occlusion culling can be app-lied to OpenSG. In the following Sections 3, 4 and 5 three different approaches are presented for image-space occlusion culling. In Sec-tion 6, we introduce the OSGviewer applicaSec-tion, which was used for tests and implementation of the presented techniques. Finally the results are summarized in Section 8.
1.1 Related Work
Scene graph programming toolkits are widely available, e.g. Open Inventor, IRIS Performer, Cosmo3D, but most of them have no
port for occlusion culling. One of the scene graph programming toolkits having occlusion culling is Jupiter ([HP98, BSS01]). Ju-piter focuses in large model visualization and provides different concepts to manage large amounts of data. For occlusion culling Jupiter uses the HP Occlusion Culling Flag [SOG98, BS99]. Other techniques are not yet available, but could be implemented.
A wide range of algorithms for occlusion culling are available. However, not all algorithms work on every scene without doing extensive preprocessing. One of the well known algorithms is the Hierarchical z-Buffer [GKM93] which uses hierarchical data struc-tures for the depth buffer and the scene. Algorithms using OpenGL acceleration for speedup calculations are also available [BMH99]. In [KS01] the histogram extension is mentioned for doing occlu-sion culling. Another hardware extenocclu-sion is the HP Occluocclu-sion Cul-ling Flag [HP97], only available on the HP VISUALIZE fx graphics subsystem. Similar extensions are available on a small number of other graphics subsystems.
2
Traversal and Sorting
For conservative occlusion culling, we must ensure that no pixel of a given occluded object is visible in the screen-space. Hence we are using an approximation of an axis-aligned bounding box (AABB) for the occlusion culling test. If no pixel of the AABB is visible in the screen-space, the content of the AABB must be hidden. Ho-wever, if an AABB pixel is visible, its content is not necessarily visible, too.
All three approaches presented in this paper work in image-space and use the z-buffer in some way for the occlusion culling test, thus accurate z-buffer values are needed to get correct culling results. This leads to a front-to-back sorted rendering of the given scene. Without front-to-back sorted rendering, results can vary and most of the hidden parts not found.
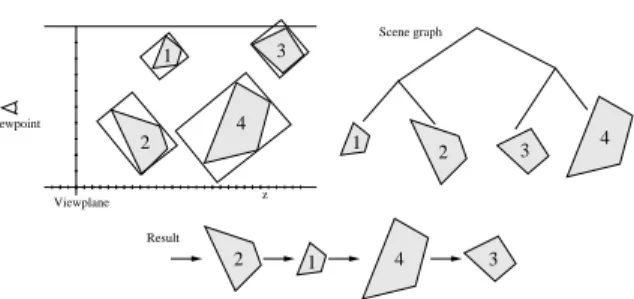
2 1 4 3 2 1 4 3 Result Viewpoint Viewplane z Scene graph 1 2 3 4
Figure 1: Example of a list for occlusion culling.
OpenSG manages axis-aligned bounding boxes for every node in the graph. These nodes can be used as bounding boxes for the applied culling approach. At the moment only the AABB of the geometry nodes are used.
The OpenSG classesRenderAction[RBV01] or DrawAc-tionrenders a scene graph and apply NodeActioncallbacks during traversal. Due to the lack of depth-sorted traversal for front-to-back rendering in OpenSG, an customized implementation of
DrawActionis used. During the traversal of the scene graph eve-ryGeometryNode
is collected by theNodeActionin a depth-sorted list. The depth-value for sorting is determined by the nearest vertex of the bounding box. In theDrawAction::stop() me-thod the depth-sorted list is traversed and one of the occlusion cul-ling approaches is applied to every saved node. If a node’s AABB is visible, the geometry is rendered or culled otherwise.
3
Occlusion Culling with Z-Buffer
The OpenGL z-buffer can be used to get the visibility information of an AABB, because it always holds the correct depth-value for every pixel. To test occlusion, the depth-values of the AABB are computed and tested against the values of a z-buffer maintained in software. AglReadPixels()to read the OpenGL z-buffer is quite expensive, hence this operation is split in fragments. Each fragment has the same size, which is a multiple of the databus width to exploit memory alignment on the graphics card. A fragment is only read, if it is necessary for a pixel test. The test stops after at least one visible pixel.
Every fragment holds two flags, aninvalid and an unused flag. At the beginning of every frame all theunused flags are true and a tested pixel against this fragments leads always to a visible pixel without reading the OpenGL z-buffer. If a pixel is visible, the inva-lid bits of all1fragments are enabled, because the geometry of the bounding box will be rendered and the content of the z-buffer may change. For pixels inside fragments with a trueinvalid bit, we read the z-buffer and disable theinvalid bit.
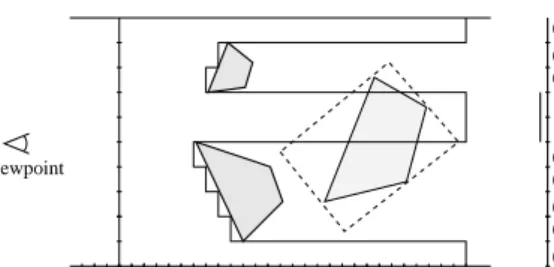
Figure 2: Z-buffer with marked fragments. The dark (blue) frag-ments are used for tests.
In many scenes it is not necessary to render every detail. For this approach a minimum of visible pixels for a bounding box can be set. Only if at least this minimum of pixels is visible, the complete bounding box is set as visible. This leads to a speedup with a miner reduction in rendering quality.
4
Occlusion Culling using the
Stencil-Buffer
As mentioned in [BMH98], the stencil-buffer can be used to compu-te visibility informations. During rascompu-terization writing to the frame-and z-buffer is disabled. For each pixel of the AABB the z-buffer test is applied. If the pixel would be visible, a value is written to
1It would be enough to invalidate only the fragments with visible pixels.
the stencil-buffer (see Figure 3) by usingglStencilOp(). Af-ter rasAf-terizing the AABB, the stencil-buffer is read and sampled in software. Occluded AABB will not contribute to z-buffer, hence will not cause a respective entry in the stencil-buffer.
0 0 0 0 0 0 Stencil−buffer 1 0 0 1 pixels Visible max z Viewpoint Viewplane z
Figure 3: Occlusion test with the stencil-buffer.
The actual implementation reads the whole region of the covered zone by the AABB. This could be optimized like the fragments in Section 3 or with the interleaving scanning scheme from [BMH98].
5
Occlusion Culling with the
HP Occlusion Culling Flag
The HP Occlusion Culling Flag [HP97] is a small hardware exten-sion, which returns information of the visibility of an object. The AABB is rendered through the pipeline with disabled color- and z-buffer writes. Is the result a visible AABB (at least one pixel of the AABB triggered a z-buffer write) the content of the bounding volume has to be rendered. If more general bounding volumes are available, the HP Occlusion Culling Flag provides a very easy and one of the fastest ways for doing Occlusion Culling [BKS01].
0 100 200 300 400 500 600 700 0 10000 20000 30000 40000 50000 60000 microsec pixel No backface culling With backface culling
Figure 4: Latency for the HP Occlusion Culling flag on a Pentium III, 750 MHz with a VISUALIZE fx10
The performance of the HP Occlusion Culling Flag depends on the fillrate of the z-buffer. Larger bounding volumes need more ti-me for the test, because the whole bounding voluti-me passes always the z-buffer stage of the rendering pipeline. Figure 4 shows the cor-relation between the size of a bounding volume in screen-space and the latency for an occlusion culling request. With enabled back-face culling the test is almost twice as fast as without, because with backface culling only one scan through the z-buffer for the front-face is done. The latency is the same whether the result is visible or hidden.
6
OSGviewer
Figure 5: Mainwindow of OSGviewer
OSGviewer is a small application using OpenSG as rendering back end. For the graphical user interface is implemented with Qt and the QGLviewer ([Mei00, QGL]) for camera control. OSGview-er allows browsing and editing of the OpenSG scene graph. Mul-tiple views to the scene are allowed and QGLviewer enables in-terchanging of camera positions with drag and drop. These feature allows also the recording of camera positions. With the application CameraPathInterpolationfrom the QGLviewer package a camera path can be calculated and then viewed with the OSGviewer for reproducible performance measurements with different configu-rations.
Figure 6: Sceneview of OSGviewer with QGLviewer
7
RESULTS
For all tests we have used the FormulaOne car from the Jupiter project. The model has about 750.000 polygons in 306 geometry nodes. A camera path with 342 frames was created with the tools from the QGLviewer. In every frame the whole model is located within the viewing frustrum, therefore view frustrum culling itself does not remove geometry. In Figure 7 and Table 1, the resulting framerates are shown for the different occlusion culling techniques.
3 3.5 4 4.5 5 5.5 6 6.5 7 0 50 100 150 200 250 300 350 Z-Buffer test Stencil-Buffer HP No culling
Figure 7: Framerates for the camera path.
Min. Max. Avg. Deviation Avg.
fps fps fps fps speedup
No culling 3.58 3.85 3.77 0.03 0.0%
Stencil test 3.46 5.13 4.28 0.23 12.0% Z-Buffer test 3.65 5.15 4.42 0.28 14.8%
HP Flag 4.44 6.67 5.70 0.41 33.8%
Table 1: Comparison between the used culling techniques
The first benchmark (no culling) shows the performance of OpenSG without any changes. In the second benchmark we tested the performance of the stencil-buffer test. In the third test the z-buffer technique was applied and in the last one the HP Occlusi-on Culling flag was used. For all benchmark tests a Dual Pentium III with 750 MHz with a HP VISUALIZE fx10 running Linux was used for rendering. Although OpenSG supports threading, no threa-ding was used for the tests. The resulting framerates show average speedups between 12% and 34%.
0 20 40 60 80 100 0 50 100 150 200 250 300 350 Percent Frame Hidden polygons Hidden nodes
Figure 8: Percentage of occluded nodea and polygons for the came-ra path.
Occlusion culling generally depends on the scene and its depth complexity. Figure 8 show the percentage of hidden nodes and po-lygons in every frame. The limited depth complexity of the test da-taset (about 60% of the polygons are detected as hidden) leads only to a limited culling performance. In scenes with a higher depth
com-plexity, a better performance can be expected, as preliminary tests indicate.
The benchmarks show, that the HP Occlusion Culling Flag is the fastest solution in this test. The stencil- and z-buffer-tests show similar results, whereby the stencil-test will perform better in fra-mes with lower depth-complexity (less setup- and rasterization-time in software), while the z-buffer-test is faster in frames with more depth-complexity, because the z-buffer in software needs less updates (for hidden nodes is no update necessary).
8
CONCLUSIONS and FUTURE WORK
In this paper, we tested three occlusion culling techniques for OpenSG to speedup the performance of large model rendering.
The scene graph hierarchy was derived from the hierarchical part list of the MCAD model. In cooperation with the University of Braunschweig algorithms for special hierarchies will be developed. One of the major problems for the implemention of occlusion culling is the lack of enhanced traversal techniques in OpenSG. This will be available in the next public release of OpenSG. In conjunction with the enhanced traversal subsystem and the speci-al hierarchies a clean API for culling will be defined like [Fue01].
Furthermore only the Pentium III PC with a VISUALIZE fx was used for the tests. Other architectures and graphics subsystems are in the focus of further development.
We showed only image-based techniques which do not exploit features of special scenes or applications. Another point of deve-lopment in the near future will be the implementation of portal and virtual occluder nodes. The virtual occluder nodes with shadow fru-stras mentioned in [HMC+97] The portal nodes will work like the portals for dynamic scenes. These new nodes can help to speedup special applications and scenes, e.g. architectural walkthroughs.
To get further speedups, frame-to-frame coherence could be ex-ploited, better bounding volumes as mentioned in [BKS01] could be used and in conjunction with special hierarchies and enhanced traversal schemes hierarchical approaches could be applied to cull complete subgraphs.
ACKNOWLEDGEMENTS
This work is supported by the OpenSG PLUS project of the bmb+f in Germany. The MCAD dataset are available from the Kelvin pro-ject [Jup].
We would like to thank Dirk Reiners, Gerrit Voss and Johannes Behr for their help in OpenSG programming. Manfred Weiler for his SGI support and SGbrowser code. Dirk Bartz and Alexander Ehlert from the University of T¨ubingen for proof reading.
References
[BKS01] D. Bartz, J. Klosowski, D. Staneker, Tighter Bounding Primitives for Better Occlusion Performance, Siggraph Visu-al Proc., 2001
[BMH98] D. Bartz, M. Meißner, T. H¨uttner, Extending Graphics Hardware for Occlusion Queries in OpenGL, In Proc. of Eurographics/SIGGRAPH Workshop on Graphics Hardware, pages 97-104, Lisboa, Portugal, August 1998
[BMH99] D. Bartz, M. Meißner, T. H¨uttner, OpenGL-assisted Oc-clusion Culling of Large Polygonal Models, Computers and Graphics - Special Issue on Visibility - Technics and Applica-tions, 23(5): 667-679, 1999
[BS99] D. Bartz, M. Skalej, VIVENDI - A Virtual Ventricle En-doscopy System for Virtual Medicine, EG/TVCG Symposiu-mon Visualization, 155-166, 1999
[BSS01] D. Bartz, D. Staneker, W. Straßer, Jupiter: A Toolkit for Interaction and Large Model Visualization, Proc. of Sympo-sium on Parallel and Large Data Visualization and Graphics, 2001
[CCDS2000] D. Cohen-Or, Y. Chrysanthou, F. Durand, and C. Sil-va, Visibility: Problems, Techniques, and Application, In ACM SIGGRAPH Course 4, 2000
[Cla76] J. Clark, Hierarchical Geometric Models for Visible Sur-face Algorithms, Communications of the ACM, Vol. 19, No. 10, 1976
[Dur99] F. Durand, 3D Visibility: Analytical study and Applicati-ons, PhD thesis, Universite Joseph Fourier, Grenoble, France, 1999
[Fue01] Christoph F¨unfzig, Design of a flexible visibility libra-ry (draft), Computer Graphics, Digital Libralibra-ry Lab, Braun-schweig Technical University, 2001
[Gar99] M. Garland, Multiresolution Modeling: Survey and Fu-ture Opportunities, In Eurographics STAR report 2, 1999 [GCS91] Z. Gigus, J. Canny, R. Seidel, Efficiently Computing and
Representing Aspect Graphs of Polyhedral Objects, IEEE Transactions on Pattern Analysis and Machine Intelligence, 13(6), S. 542-551, 1991
[GKM93] N. Greene, M. Kass, G. Miller, Hierarchical z-buffer visibility, Proc. of ACM Siggraph, S. 231-238, 1993 [HP97] Hewlett-Packard Company, GL HP Occlusion Test,
Specification Document, erh¨altlich unter http://www.opengl.org/
[HP98] Hewlett-Packard Company, Jupiter 1.0 Specification, Draft F, 24.01.1998
[HP00] Hewlett-Packard Company, HP IA32 VISUALIZE fx5 and fx10 graphics accelerators , White Paper, HP 2000 [HMC+97] T. Hudson, D. Manocha, J. Cohen, M. Lin, K. Hoff, H.
Zhang,Accelerated Occlusion Culling using Shadow Frustra, Proc. of ACM Symposium on Computational Geometry, 1997 [Jup] The Kelvin Project,
http://www.gris.uni-tuebingen.de/ kel-vin/
[KS01] J. Klosowski, C. Silva, Efficient Conservative Visibility Culling Using The Prioritized-Layered Projection Algorithm, IEEE Transactions on Visualization and Computer Graphics, 2001 (to appear)
[MBH+99] M. Meißner, D. Bartz, T. H¨uttner, G. M¨uller, J. Einig-hammer, Generation of Subdivision Hierarchies for Efficient Occlusion Culling of Large Polygonal Models, Technical Report ISSN 0946-3852, Universit¨at T¨ubingen, WSI-99-13, 1999
[Mei00] M. Meißner, Occlusion Culling and Hardware Volu-me Rendering, Dissertation der Fakult¨at f¨ur Informatik der Eberhard-Karls-Universit¨at T¨ubingen, 2000
[OSG00] OpenSG Forum, OpenSG - Open Source Scenegraph, http://www.opensg.org, 2000
[QGL] QGLviewer, http://www.qglviewer.de/ [RBV01] Dirk Reiners, Johannes Behe, Gerrit Voss, OpenSG
Starter Guide Version 1.0, OpenSG 1.0 Source Release, 2001 [Sev99] K. Severson, VISUALIZE fx Graphics Accelerator
Hard-ware, Technical Report, Hewlett-Packard Company, http://www.hp.com/workstations/support/ documentation/whitepapers.html, 1999
[SGI99] SGI, Silicon Graphics Visual Workstation OpenGL Pro-gramming, Technical Report, SGI, 1999
[SOG98] N. D. Scott, D. M. Olsen, E. W. Gannett, An Overview of the VISUALIZE fx Graphics Accelerator Hardware, The Hewlett-Packard Journal, May 1998
[TS91] S. Teller, C.H. Sequin, Processing for Interactive Walkthroughs, Proc. of ACM Siggraph, S. 61-69, 1991 [GL] OpenGL, Manual Pages, http://www.opengl.org [GL99] OpenGL, Reference Manual, 3rd Edition, Longman
Hig-her Education, 1999
[WND99] M. Woo, J. Neider, T. Davis, Open GL Programming Manual, 3rd Edition, Addison Wesley Longman Publishing, 1999
[ZMHH97] H. Zhang, D. Mannocha, T. Hudson, K. Hoff, Visibili-ty Culling using Hierarchical Occlusion Maps, Proc. of ACM Siggraph, S. 77-88, 1997