SIMULATION APPROACH FOR NON
LINEAR BEHAVIOUR IN SPASTICITY
B. Mohan1, K. Naresh2
1
Assistant Professor,
Department of Electrical and Electronics Engineering, K L University, Guntur, Andhra Pradesh, India.
e-mail: [email protected] 2
Assistant Professor,
Department of Electrical and Electronics Engineering, K L University, Guntur, Andhra Pradesh, India.
e-mail: [email protected]
ABSTRACT
We examined ankle clonus in spastic subjects to determine whether this oscillatory behavior has the properties of a limit cycle, and also the effects of changes in motoneuron threshold and increasing loop delay on the stability of the stretch reflex in man. By developing a computer model representative of the ankle stretch reflex pathway, we could simulate a wide range of physiological conditions in order to better understand how each affect reflex behavior and determine the possible mechanisms underlying clonus. We hypothesize that clonus arises when two conditions occur simultaneously. First, the reflex pathway contain long transport delay times, and second, the excitability of the motoneurons is enhanced through reductions in synaptic current threshold.The feasibility of these modulations are verified Matlab/SImulink software and simulation results are presented.
Key words: Limit Cycle, Stability, Physiological, Matlab Simulation.
INTRODUCTION
Autogenetic reflex pathways play a major role in human motor control, since they both monitor and regulate disturbances in muscle length and force using error signals derived from muscle spindles and Golgi tendon organs.
The stability of reflex responses in humans is often compromised following injury to the central nervous system, in that selective joints undergo involuntary oscillatory movements following a brief perturbation. This instability, referred to as clonus, is typically accompanied by other signs of reflex hyper-excitability, such as increased muscle tone and augmented tendon jerks. We used a mathematical model of the ankle stretch reflex pathway to show that normal reflex responses would become unstable if two conditions occur simultaneously. First, the reflex pathway contains significant delays, arising from both prolonged neural transport times and from the low-pass filtering properties of the muscle. And second, the level of reflex excitability is increased because of a reduced motoneuron firing threshold. Thus, for a well-defined and appropriate set of model parameters, the predicted reflex responses were analogous to a limit cycle, in which the ankle movements were both periodic and extremely stable to small perturbations.
Although limit cycles are common in biological systems and may offer some inherent benefits to the system, from the standpoint of reflex behavior, this response pattern can be considered unstable. A stable reflex response would be one that resists an external perturbation and does not in itself generate unwarranted movements. In the case of clonus, these oscillations will clearly make voluntary movements less controllable, and so this behavior is considered unstable. In light of these remaining uncertainties, the goals of this work were to examine whether clonus is in fact a limit cycle and, by studying the effects of external perturbations on clonus kinematics and muscle excitation.This understanding will offer new insight on the mechanisms responsible for clonus, with the hopes of developing more effective therapeutic treatments for its control.
2.MODELOFTHEREFLEXATHWAY
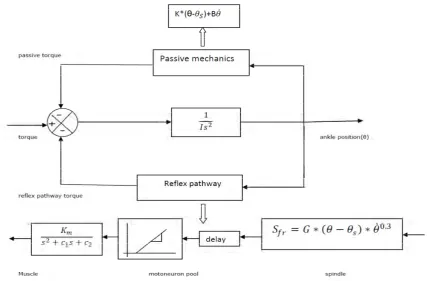
The model, as shown in Fig.1, contains two separate pathways that resist the applied torque perturbation. The first resistance to stretch arises from the passive mechanics at the ankle, which was represented by a visco-elastic element. The visco-elastic element was setup to produce torque when the ankle angle exceeded a slack length, denoted as θs . The other form of resistance is due to an active reflex response, with this pathway containing elements representing the muscle spindles , transport delay, motoneuron pool input–output relationship and the plantarflexor muscles .
The objective of using this model is to better understand how the nonlinearities within the reflex pathway might interact and produce stable oscillatory motion that is robust to small external and internal perturbations.
Fig 1: Model of reflex pathway used to simulate clonus.
2.1. Muscle model
The series elastic element (SE) was treated as a combined representation of muscle and tendon stiffness, and was modeled as a quadratic function. Finally, The passive dynamics was estimated using a visco-elastic element and the passive torque generated by the kinematics of the ankle joint.
Activation Dynamics: Muscle activation dynamics were described by two coupled, first-order differential equations, which describe the torque rise and decay time constants, or equivalently the muscle’s natural frequency and damping ratio. This relation is expressed mathematically as
1 2
( )
( )
( )
dr t
cr t
c x t
dt
(1)3
(
( )
( )
)
da t
c
r t
dt
a t
(2)where x(t) is the neural input, c1, c2 and c3 are empirical constants, r(t) is an intermediate variable, and a(t) is the activation output.
2.2. Spindle Model
Muscle spindles are sensory receptors within the belly of a muscle, which primarily detect changes in the length of this muscle. They convey length information to the central nervous system via sensory neurons. This information can be processed by the brain to determine the position of body parts. The responses of muscle spindles to changes in length also play an important role in regulating the contraction of muscles, by activating motoneurons via the stretch reflex to resist muscle stretch.
Empirical nonlinear models are in common use in large neuromuscular models due to their computational simplicity and broader range. The muscle spindle model used was a modified version of the structure originally based on the work of Houk et al. (1981), where the spindle firing rate is related to the ankle position and velocity as.
0.3*
*
fr s
S
G
(3) Where G is the spindle gain,
is the joint velocity.
2.3. Motoneuron pool
The dynamic input–output properties of the motoneuron pool are still unknown. However, computer simulations of the motoneuron pool derived from steady state conditions have shown good qualitative agreement with experimental data . We used spindle Ia firing as the input to the pool as we assume synaptic current scales linearly with spindle firing rate.
Since motoneuron gain and synaptic current threshold cannot be measured directly in man, values were first selected so that the model simulated stable reflex responses that would be expected in normals. The synaptic current threshold was then varied, while holding all other parameters constant, in order to predict its influence on the stretch reflex response. Motoneuron threshold was the amount of input at which the motoneuron relationship began to rise while the motoneuron pool gain was a measure of the rate of rise (or slope).
Fig 2: Motoneuron pool input –output relationship which transforms spindle firing rate into muscle activation level.It is illustrated how motoneuron pool may shift from a normal state into a hyperexcitable state,by varying threshold.
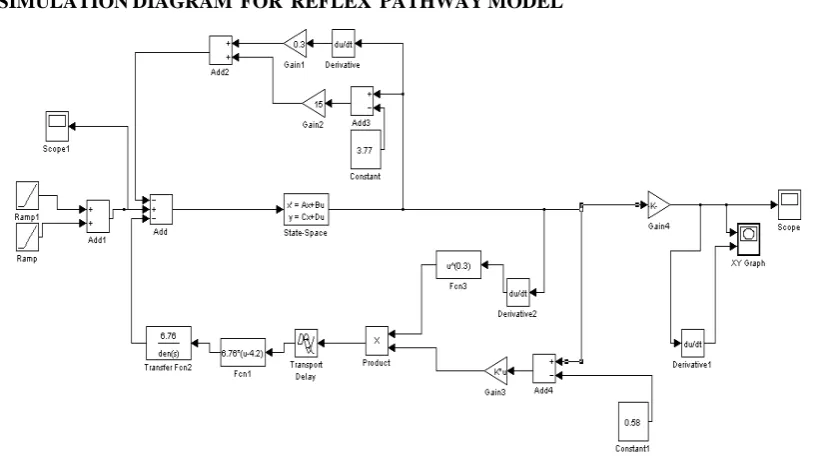
3.SIMULATIONDIAGRAM FOR REFLEX PATHWAYMODEL
4.RESULTS
4.1.General Characteristics of Clonus
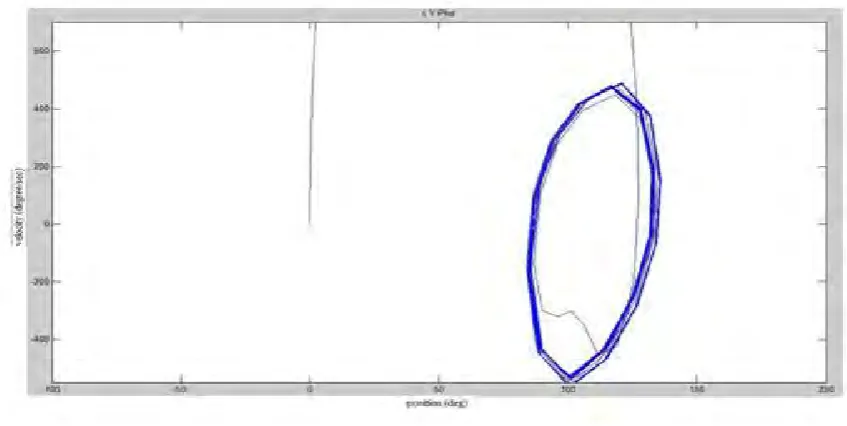
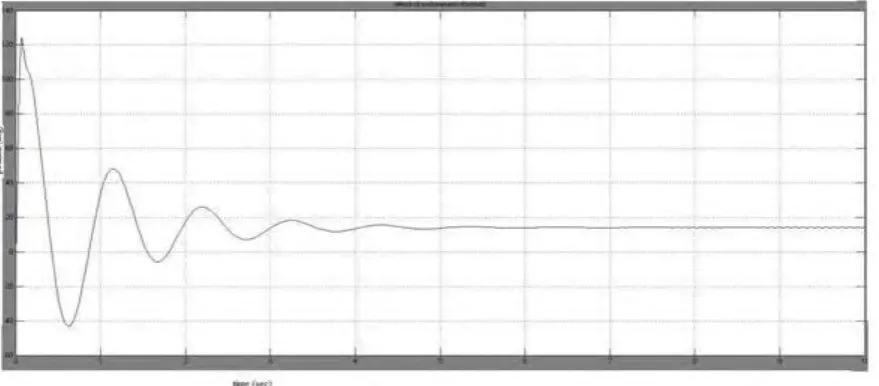
When a dorsiflexion torque was applied to the ankle, the model exhibited sustained clonus, with clonus oscillations continuing for several minutes . Fig. 4 illustrates a typical response to an applied load, where the ankle undergoes an initial transient phase as the foot moves into dorsiflexion, which is then followed by stable periodic motion. Constructing a phase plot of clonus allows us to see this periodic motion as a closed orbit with very little variability once reaching steady state Fig. 5. The orbit has an egg shape, which is the result of the ankle stiffness being much higher when in dorsiflexion than in plantarflexion. With the muscle in a quiescent state, the applied load causes the foot to dorsiflex , reaching maximum lengthening speeds on the order of 480 °ൗݏ. The active muscle force arising from the reflex combines with forces due to the passive properties at the ankle to overcome the applied load and cause the foot to plantar flexion back to a position similar to its starting state. This sequence of events gives rise to periodic motion and will continue in some cases as long as a biasing load is maintained.
Fig 4: Clonus characteristics. (a) Ankle position in response to an applied 5 Nm torque. Steady-state behavior is reached within 2 s followed by periodic motion
Fig 5: Phase plot of the periodic motion shown in Fig 4.
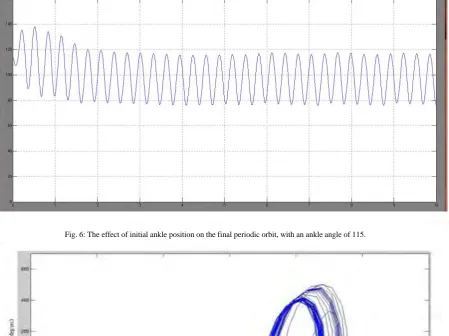
4.2.Changes In The Initial States
Fig. 6: The effect of initial ankle position on the final periodic orbit, with an ankle angle of 115.
Fig. 7: Phase plot of shown in Fig 6.
4.3.Effects of Changes in Motoneuron Current Threshold
Fig. 8. illustrates a simulation of a typical reflex response to a quick stretch of the soleus muscle in a subject with no neurological impairment. After the application of the load to the bottom of the foot, the ankle begins to dorsiflex. Spindle discharge caused by this initial muscle stretch results in a soleus contraction and ankle plantarflexion, beginning approximately 50ms later. Following the initial reflex response, the applied load again induces muscle lengthening, causing a second spindle discharge. However, since the motoneuron threshold is high, the amount of current generated during the second spindle burst results in only a weak, second reflex contraction. To simulate motoneuronal hyperexcitability in spasticity, the motoneuron input–output relationship was shifted to the left, thereby reducing the spindle firing rate needed to reach motoneuron threshold . While holding all other parameters constant , motoneuron current threshold was reduced progressively, resulting in damped oscillations [Fig. 9]. Further threshold reductions resulted in sustained oscillations similar to those observed in pathological subjects.
Fig 8: Reflex response predictions with varying motoneuron current threshold. Reflex response following a ramp torque stretch under normal conditions of a high current threshold.
Fig 9: Reflex response predictions with varying motoneuron current threshold. Damped oscillatory behavior results when the current threshold is lowered from normal levels.
4.4.Effects of Changes in Transport Delay
Fig 10: Influence of neural transport delay on the stretch reflex response, when a low current threshold was combined with a delay of 50 ms, sustained oscillations resulted.
Fig 11: Influence of neural transport delay on the stretch reflex response when reducing the delay to 20 ms forced the oscillations to damp out.
5.CONCLUSION
The results from this study demonstrate that the involuntary rhythmic oscillatory movements commonly observed in spastic subjects from a self reexcitation in a stretch reflex pathway when two conditions occur simultaneously. “The reflex pathway contains significant delays stemming from prolonged pathway conduction time”. “The excitability of the motoneurons is enhanced”. From an engineering point of view, the oscillatory behaviour observed in clonus is similar to closed loop oscillations seen in a negative feedback controller that contains high feedback gains coupled with significant delays. Taking this standpoint, a general characterization of the ankle reflex stability can be made.
6.REFERENCES
[1] Joseph M. Hidler and Brian D. Schmit, “Evidence for Force-Feedback Inhibition in Chronic Stroke” ,IEEE Transactions on Neural Systems And Rehabilition Engineering, vol. 12, no. 2, June 2004.
[2] Joseph M. Hidler and W. Zev Rymer, “A simulation studt of Reflex Instability in Spasticity: Origins of Clonus”, IEEE tansaction on rehabilitation engineering, vol.7, no.3, sept.1999.
[3] The SISO Monosynaptic Reflex Threshold and Gain: Relationship to Motoneuron Pool Parameters;H. Mullany and M. J. O’Malley
,Department of Electronic and Electrical Engineering, National University of Ireland, Dublin 4, Ireland.
[4] J. C. Houk, W. Z. Rymer, and P. E. Crago, “Dependence of dynamic response of spindle receptors on muscle length and velocity,” J. Neurophysiol., vol. 46, pp. 143–166, 1981.
[5] A. V. Hill, “The heat of shortening and the dynamic constants of muscle,” Proc. Roy. Soc., vol. B126, pp. 136–195, 1938.
[6] J.A.Tenreiro Machado, J.L.Martins de Carvalho, and Alexanra M.S.F.Galhano, “ Analysis of robot dynamics and compensation using classical and computed torque techniques ″, IEEE Transactions on education , vol.36, no.4, Nov.1993.