2018 2nd International Conference on Modeling, Simulation and Optimization Technologies and Applications (MSOTA 2018) ISBN: 978-1-60595-594-0
Interference State Estimation Based Weight Setting for Multichannel
Joint Detection
Ling LI, Qin CHEN, Jun-jie LI, Chun-yi SONG
*and Zhi-wei XU
Institute of Marine Electronic and Intelligent System, Ocean College, Zhejiang University
Key Laboratory of Ocean Observation-Imaging Testbed of Zhejiang Province
*Corresponding author
Keywords: Multichannel joint detection, Weight setting, Interference state estimation.
Abstract. Faced with the low signal-to-noise ratio (SNR) and the presence of time-varying interference in passive radar target detection, multi-channel joint detection is considered as an effective solution, performance of which largely depends on the accurate weight setting in fusion of multichannel detection results. Our previous work focuses on the weight setting based on exact interference power detection, which is complex in general. We then propose to set a weight based on interference state estimation over each frequency channel in this paper. We model the interference state by time series and conditioned probability, and develop an effective interference state estimation method. Numerical simulation results verify the performance of the proposed strategy.
Introduction
Passive radar has increasingly attracted attentions since it has lots of advantages compared to active radar. However, passive radar also faces more detection challenges owing to very low SNR of target reflected signals and time-varying interference.
Cross correlation is conducted to detect the presence of target echo using the direct-path signals as reference signals. Some work use multistatic passive radar system with linear fusion algorithm for target detection [1], and this system also works well under time-varying interference [2]. However, detection challenges caused by moving targets, have not been paid enough attention in [1] and [2]. The system using multi-channel joint detection alleviate the impact of time-varying interference and moving targets effectively [3].
In multichannel joint detection, interference detection and estimation is critical in weight setting for fusion of detection results [4]-[5]. Weight setting based on interference power detection was proposed in [3]. However, detection of interference power in each duration will cause high complexity. We then propose a simplified weight setting method as sub-optimal solution in this work, which realizes weight setting based on interference state estimation. Time-varying interference is usually produced by other transmitters and could exist in consecutive detection periods. Correspondingly, a probabilistic model is developed to describe the characteristic of consecutive interference, in particular existence of interference over consecutive durations. Once interference was detected in the previous duration, whether the same interference exists or not in the current duration could be estimated with good accuracy based on the model. Weight setting for the current duration could be then set according to the estimation results, so as to decrease complexity by avoiding detection of interference power.
Problem Formulation
Channel Model
.m m m m
x n b s n v n (1) for n=1,2,…,N and m=1,2,…,M, where N is the number of samples in each channel, M is the number of channels. sm is the received signal, bm is the amplitude.vm is thermal noise and is
supposed to be Gaussian white noise with zero mean and variance σwm2 .
The reflected signal of mth channel y[n] is the sum of target echo, direct-path signal and interference can be expressed as follows:
-
.m m m m m m
y n a s n
c s n w n (2) where τ is arrival time delay, cm is the strength of direct-path signal, wm is interference with powerσwm2 . Generally, due to directions of angle of reference signal and reflected signal are different, w m
and vm are supposed to be independent identically distributed (i.i.d.). Binary hypothesis is
established to judge whether the target is existed or not by:
0
1
H H
.
.
m m m m
m m m m m m
y n a s n w n
y n a s n
c s n w n
:
: (3)
where H0 is the condition that target is not existed while H1is the condition that target is existed. Interference Model
The time-variant of interference is embodied in the fluctuation of its power among detection periods, that is, the interference power σwm2 can be expressed as:
2 2 2
, , 0.
wm m i m i
(4) where σ02 denotes the noise power when there is no interference exists, i (i=1,2,…,Np) denotes theith detection periods, and μm,i is called fluctuation factor meets the conditions that:
, ,
,
,
.
1, 1
m i m i
m i
with P
with P
(5)
where µ is a constant, and Pm,i denotes the fluctuation probability in the mth channel and ith detection periods .So we use binary data 1 with probability Pm,i and 0 with probability 1-Pm,i to denote existence and non-existence of interference. Moreover, interference could exist in consecutive detection periods. Accordingly, a conditioned probabilistic model is proposed:
1
1
( 1| 0) . ( 1| 1) .
i i
i i
P X X q
P X X Q
(6) where q depicts appearance probability of interference either lasting only one detection duration or over consecutive periods, Q is called relevant probability here and depicts the probability of a interference lasting over consecutive detection periods .
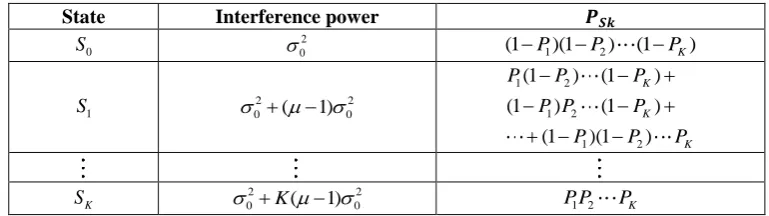
We assume K interferences in each channel at most, they are independent to each other and all satisfy (6). We further assume that all interferences have the same power. We use Sk to denote the
channel state when k interferences exist in the channel and PSk to denote the probability of a channel
being in the state Sk, Pk to denote the probability of the k th interference existing in a channel. The
Table 1. Interference Power Distribution.
State Interference power 𝑷𝑺𝒌
0
S 2
0
(1P1)(1P2) (1PK)
1
S 2 2
0 ( 1) 0
1 2
1 2
1 2
(1 ) (1 )
(1 ) (1 )
(1 )(1 )
K
K
K
P P P
P P P
P P P
K
S 2 2
0 K( 1) 0
P P1 2 PK
Detection Algorithm
Weight Setting
The detection statistic of multi-channel cross-correlation detection is given by:
1 1
[ ] [ ] [ ].
M N
mc m m
m n
T w m y n x n
(7)where w[m] is the weight for the m th channel, according to relevant studies in [3], weight is thought to be only dependent on interference power, a larger weight is setting for the channel which has low interference power while a smaller weight is setting for one which has high interference power, so the weight for the m th channel is setting as
2 , 2 1 1 . 1 wm power m M m wm w
(8)where σwm2 is calculated by:
2 ( ) ( )
ˆ .
T
m m m m
wm
y y y y
N
(9)where ym denotes the received data of reflected signal and y̅m denotes the mean of ym. The noise
power of reference signal σvm2 is ignored in our work.
Owing to the time-variance of channel state, interference power should be calculated in every period constantly to keep high performance .We propose a sub-optimal weight setting based on predicted probability of channel state. For the i th period and the m th period the weight is :
, , 2 2 2
, , 0 , 0 0
1 1
.
[ ] ( )
k
pro m i K
m i S m i k
w
E P k
(10)where E[·] denotes the expectation of interference power, Pm,i,Sk denotes the discrete distribution of
channel state. PSk is determined by Pkin Table 1.
In our work, the estimated Pk in the i th (i=2,…,Np) period is given as follows:
Step 1: Determine the interference state Xi-1 in the (i-1)th periods as prior information Step 2: Calculate the estimated probability by:
1
1
, 1
( 1) .
, 0 i k i i Q X P X q X
(11)
Step 3: Calculate the estimated probability in later L (L<<Np) periods by:
l
it means that Pk in the (i+l)thperiod can be given by states in the previous periods under interval l,
specially, when L = 0, the Step 3 is missed. Step 1~ Step 3 are implemented alternately in consecutive L periods.
Then we use average detection probability PD over total Np periods to make performance
analysis:
, 1
1
.
p
N
D D i
i p
P P
N
(13)where 𝑃𝐷,𝑖 is the detection probability in the i th period [7].
Simulation
For received data, Set bm=1,cm=0,am=1 for all values of m. We set false alarm probability PFA =0.1,
sample number N = 800, and set Monte Carlo simulation runs to 500.
We set number of periods T=500, assume K=2, it means that there are two interference sources generated by model (6) in each channel, and set µm = 5, then we get the value of interference power
of each channel state σ02, 5σ02, 9σ02.
When summarizing simulation results, we use 𝑤𝑝𝑜𝑤𝑒𝑟 to represent the weight setting based on
interference power detection, i.e. the conventional method, and use 𝑤𝑝𝑟𝑜 to represent the proposed one in Figures 1-4.
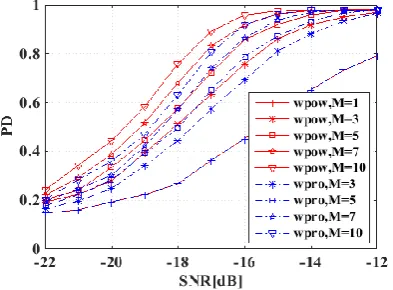
Performance of multichannel joint detection under different number of channels with 𝑤𝑝𝑜𝑤𝑒𝑟
and 𝑤𝑝𝑟𝑜 are compared when setting Q = 0.95, q = 0.1. As shown in Figure 1, performance improves with increased number of channels.
The average existence probability of interference could be calculated from the series as 𝑔 =∑𝐼𝑖=1𝑋𝑖
𝐼 , From definition in (6), we know g is determined by Q and q. Without losing generality,
we set q = 0.1 and vary Q to 0.6, 0.7, 0.8, 0.9, to investigate effects of g on performance. As shown in Figure 2, when existence probability of interference gets larger, the performance gets lower with both 𝑤𝑝𝑜𝑤𝑒𝑟 and 𝑤𝑝𝑟o.
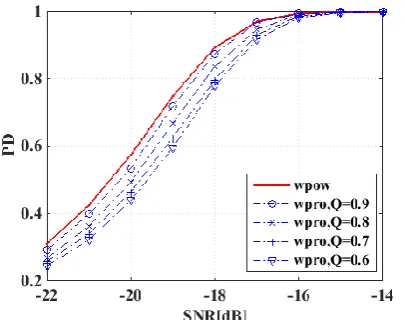
We then set g=0.3 and vary Q to different values to investigate the effects of Q on performance. As shown in Figure 3, when increasing Q the performance of 𝑤𝑝𝑟𝑜 gets closer to that of 𝑤𝑝𝑜𝑤𝑒𝑟. This suggests that a higher relevance probability Q will contribute toward to more accurate estimation results.
[image:4.595.93.290.602.747.2]The above results are achieved under L= 0 of (12). That is, interference state in only one period is estimated. In Figure 4, we set L to 1, 3 and 5, respectively, to investigate the impact of L to the detection performance. The results show that increase of L will lead to worse detection performance, and performance under L=5 has around 2dB gap to that under L=0.
Figure 3. PD vs SNR under the same existence probability Figure 4. PD vs SNR, M =10, Q = 0.9, q = 0.1 under of interference (g fixed), M =10, g = 0.3, L = 0. different L.
Conclusion
In this paper, interference state estimation based weight setting is proposed for multi-channel joint detection. The proposed method aims to reduce the complexity while obtaining sub-optimal performance, as compared to the weight setting based on detection results of interference power. In the proposed method, interference state is considered as binary random series, conditioned probability model is established to describe the characteristic of an interference lasting over consecutive durations. The distribution of interference could then be described using the binary random series and conditional probability model. Simulation results have verified that when assuming interference last over consecutive detection durations with high probability, which usually is the truth in reality, the simplified method could achieve slightly degraded performance as compared to the optimal method.
Acknowledgment
This work is supported by NSFC projects 61731019 and 61674128, by Zhejiang Provincial NSFC project LY16F010005, and by the Fundamental Research Funds for the Central Universities 2017XZZX001-02A.
References
[1] Zhao. H. Y, Liu. J, Zhang. Z. J, Linear fusion for target detection in passive multistatic radar. Signal Processing, vol. 130, pp. 175-182, Jan. 2016.
[2] G. Xianjun, H. You and S. Jie, Cross-correlation detection and time difference estimation in non-cooperative bistatic radar systems, IEEE 10th International Conference on Signal Processing Proceedings, Beijing, pp. 2261-2265, 2010.
[3] Chen Q, Li J, Zhu J, et al. A multi-channel based passive detection strategy for high-speed moving target in the airspace under varying interference[C]. Asia-Pacific Conference on Communications. 2017:1-5.
[4] O. Durmaz Incel and P. Jansen, Characterization of multi-channel interference, 2008 6th International Symposium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks and Workshops, Berlin, pp. 429-435, 2008.
[6] Cao T T V. A CFAR algorithm for radar detection under severe interference[C]. Intelligent Sensors, Sensor Networks and Information Processing Conference, 2004. Proceedings of the. IEEE, 2005:167-172.