International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)222
An Efficient Method of Forest Fire Detection Using Wireless
Sensor Network with Yager’s Modified Dempster’s Rule
A. Balasubramanian
1, Dr. M. Mohamed Sathick
2, Dr. K. Senthamarai Kannan
31Reserch Scholar, 3Professor, MS University, Tirunelveli, India, 2
Principal, Sadakathullah Appa College, Tirunelveli
Abstract — The most common hazard in Forest is Forest Fire. Forest Fires are as old as the Forest themselves. They pose a threat not only the Forest wealth but also to the entire regime seriously disturbing the bio diversity, the ecology and the environment of a region. The present methods of detection of Forest Fire using Satellite are widely considered to be inadequate to foresee the Fires in the Forest. Moreover, the satellite based methods of Forest Fire detection predict the Forest Fire only after the Fire spread uncontrollable and this method is considered to be fruitless to forecast the Forest Fire. Hence, an Intelligent system is introduced which comprises of multiple classifiers to classify the Forest Fire attributes and fusion methods using Yager’s modified Dempster’s rule are considered to be very effective to combine the data to predict the Fire more accurately. The Experimental results show the combination approach yield better accuracy in predicting the Forest Fire.
Keywords — Dempster’s rule, Yager’s Modified Dempster’s rule, Support Vector Machine, Uncertainty, Forest Data Mining.
I. INTRODUCTION
During summer, when there is no rain for months, the Forest become littered with dry senescent leaves and twinges, which could burst into flames ignited by the slightest spark[19]. The Himalayan forests, particularly, Garhwal Himalayas have been burning regularly during the last few summers, with colossal loss of vegetation cover of that region. The youngest mountain ranges of Himalayas are the most vulnerable stretches of the world susceptible to Forest Fire. Forest Fire is caused by Natural causes as well as Manmade causes[20]. High atmospheric temperatures and dryness (low humidity) offer favorable circumstance for a Fire to start. Fire is also caused when a source of Fire like naked flame, or any source of ignition comes into contact with inflammable material. Forest Fire also pose serious health hazards by producing smoke and noxious gases, as the events in Indonesia after the Forest Fire on the islands of Sumatra and Borneo have shown the ill effects of Fire. The burning of vegetation gives off not only carbon dioxide but also a host of other, noxious gases (Green house gases) such as carbon monoxide, methane, hydrocarbons, nitric oxide and nitrous oxide, that lead to global warming and ozone layer depletion.
Consequently, thousands of people suffered from serious respiratory problems due to these toxic gases. Burning Forest and Grasslands also add to already serious threat of global warming. Hence, Forest Fire detection is very important not only to preserve the Forest, but also to protect the environment.
II. WIRELESS SENSOR NETWORK
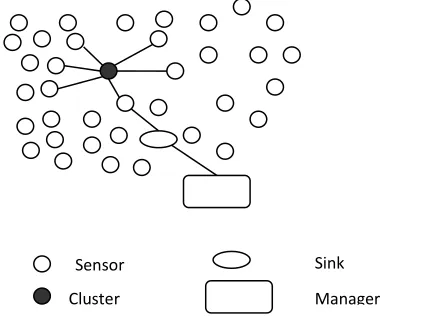
[image:1.612.335.546.377.536.2]With the advent of the Nano-age, electronic components have become appreciably smaller in size and cheaper in cost. This has enabled the development of low-cost, low-power, multifunctional sensor nodes that are small in size and communicate very fastly and effectively.
Figure 1 Architecture of Wireless Sensor Network
These tiny sensor nodes, which consist of sensing, data processing, and communicating components, leverage the idea of sensor networks based on collaborative effort of a large number of nodes [1]. The architecture of a sensor network is shown in the figure 1 above. A sensor network is composed of a large number of sensor nodes, which are densely deployed inside the phenomenon, here it is the Forest. The position of sensor nodes need not be engineered or pre-determined. This allows random deployment in inaccessible areas inside the Forest.
Sensor
Cluster
Sink
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)223
On the other hand, this also means that sensor network protocols and algorithms must possess self-organizing capabilities. Another unique feature of sensor networks is the cooperative effort of sensor nodes.
III. DESCRIPTION OF CLASSIFIERS
The main aim of Classifiers is to classify the data in to their respective classes of Fire or no Fire. The better the classification achieved the better the possibility of detecting and forecasting the Forest Fire.. Recently, Support Vector Machine (SVM) has been recognized as a better tool to deal with high-dimensionality problems like in the case of Forest as it involves thousands of acres [15].The main aim of Support vector machines (SVMs) is to find hyper-planes that separate data points in to their respective classes of Fire or no Fire [3]. The better the separation achieved the better the data classification that is ultimately possible. In order to determine the equation of the hyper-plane, the support vector machine searches for those data points that lie closer to data points of another class. These points are called “support vectors”. The number of input vectors defines the dimension of the input space [4]. If there are two linearly separable classes of data, the goal is to find a line that separates the two classes from each other, thereby establishing the input values that define the two classes.
Another popular method of classification is SVMlight, which
is nothing but an implementation of Support Vector Machines (SVMs) in C Language. The main features of the program include: fast Optimization algorithm considering the “Shrinking”, Caching of Kernel evaluations, use of
folding in the linear case. SVMlight solves ranking
problems. In support vector machine, linear separating hyper plane with a maximum-margin in the higher feature space is induced by the kernel function. Some common kernel functions include polynomial, RBF, sigmoid, etc.. After substituting the approximate RBF kernel into the classification formula, it is possible to classify the data in to the classes of Fire or no Fire. Multiple classifiers are used in a system in order to make the system more reliable leading to an advantage of overcoming the weaknesses exhibited by any classifier. The fusion of classified outputs from the classifiers is accomplished by fusion theories.
IV. DEMPSTER -SHAFER THEORY
The Dempster-Shafer theory (DST) of evidence, also known as the theory of belief functions, is a tool for representing and combining measures of evidence.
It is a Fusion theory and is used to fix the uncertainty in the model [15]. Dempster-Shafer theory has been chosen over probability theory, possibility theory and fuzzy theory because of its straightforward application to the problem, and the experimental results shows that it performs well in the area of classifier fusion. One of the most important features of DST is that the model is designed to cope with varying levels of precision regarding the information and there are no further assumptions needed to represent the information. It seems well enough to explain the term “Belief” which is nothing, but a measure of trust or confidence that a particular event will occur. There are three important functions in Dempster-Shafer theory: the Basic Probability Assignment function (bpa or m), the Belief function (Bel), and the Plausibility function (Pl). The basic belief assignment (BBA) is a primitive of evidence theory. The BBA, represented by m(.), defines a mapping of the power set to the interval between 0 and 1, where the BBA of the empty set is 0 and the summation of the BBAs of all the subsets of the power set is 1. The value of the BBA for a given set A (represented as m(A)), expresses the amount of all related and available evidence that supports the claim that a particular element of X (the universal set) belongs to the set A, but no particular subset of A. The value of m (A) is related only to the set A and makes no additional assumptions about any subsets of A. Any further evidence on the subsets of A would be represented by another BBA. The BBA can be shown by the equations:
m (X) [0,1] (1)
For any classification problem, discrete number of classes is defined. The power set contains all possible subsets [9]. In probability theory It is possible only to see the information about support of hypothesis and simultaneously see the information about the negation (compliment). But, in D-S theory, the uncertainty or not knowing is also modeled [15].The measure of total belief committed to A can be obtained by computing the belief function for A which adds the mass of all the proper subsets of A.
Bel (A) = m(B) (2) BA
The belief function represents the lower limit of the probability and plausibility function (Equation 3) provides the upper limit of the probability.
Pl (A) = 1 – Bel (A) = m(B) (3)
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)224
The difference between the two functions (Equation 2 and Equation 3) represents the ignorance [10]. Evidence can be combined by computing the orthogonal sum using
Dempster’s rule of combination where Evidence A and
Evidence B are used for computing a new belief function for a focal element C.
m1,2(C) =
m1(A) m2(B) /
m1(A) m2(B) (4)A B = C A B
=
m1(A) m2(B) / (1 -
m1(A) m2(B)) (5)A B = C A B
In this approach, the classifier output is considered to form the evidence and a decision such as Fire or no Fire forms an event.
V. RELATED WORK
It is a well known fact that the satellite based monitoring is a popular method to detect Forest Fire [7]. But, the very long scan period and low resolution of satellites restrict the use and effectiveness of the satellite based Forest Fire detection. Moreover, the difficulty of using Satellites based method is that it cannot forecast Forest Fire before the Fire is spread uncontrollable and sometimes the poor weather conditions (e.g. clouds) will seriously decrease the accuracy of satellite-based Forest Fire detection. After that Neural network based single classifier using Wireless Sensor Network is used to classify the data of Fire or no Fire [8]. Here, the Processing of data is through a single classifier. Instead of relying on a single classifier, it is proposed an intelligent and robust system for Forest Fire detection which has multiple classifiers.
VI. PROBLEM STATEMENT AND PROPOSED WORK
The management of continuous and large data is an issue of main interest in Forest Fire detection. The sensors multiplicity in Forest Fire detection makes the decision-making process more complex. Thus, it is very difficult to find the “credible” information in such information mass. The main problem is to make a decision when two or more experts give contradictory information Hence, it is necessary for implementing a true fusion engine for localization informations; with a principle of conditioning and for this case, the Yager’s modified Dempster’s rule seems to be very effective[13]. Recent advances in yager’s theory have shown that this theory was able to handle the contradiction between propositions in a quite flexible way.
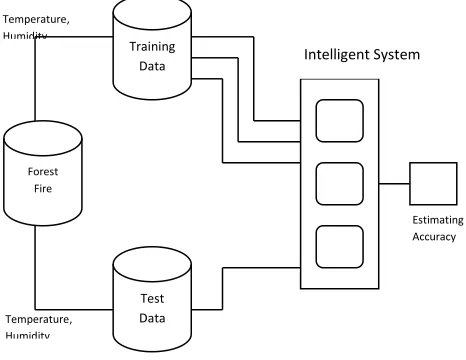
Moreover, when evidences are highly conflicting, fusion result will be improper and tiny changes of basic probability assignment function in this rule can bring sharp changes of fusion result. Moreover, If there are disaccords between one piece of evidence and several other evidences, irrational result will be induced. So, Dempster’s rule of combination of evidence is not effectual. So, it is necessary to implement the Yager’s modified Dempster’s rule. The Architecture of proposed work using yager’s modified Dempster’s Rule is given below. The proposed intelligent and robust system for Forest Fire detection consists of three different classifiers for classifying the large Forest data. Processing of data such as Temperature and Humidity are via classifiers.
[image:3.612.334.567.310.490.2]
Figure 2 Architecture of Intelligent System
The Forest Fire attributes such as Temperature, Humidity measured periodically by the sensor nodes are sent to the intelligent system. The intelligent system which comprises of three different classifiers such as SVM, SVMLight and SVMRBF denoted as 1, 2 and 3 in the Architecture shown above, process the data. Each of the above said classifiers provide beliefs for each class such as No Fire (Sustentation) and Fire (Cataclysm). These pieces of evidence are then combined to reach a final decision using yager’s belief combination formula. The experiments are accomplished on Forest data such as Temperature and Humidity. The approach proposed above has two primary advantages. One advantage is that Robustness across multiple datasets with multiple classifiers Suppose if it is a single classifier and the classifier misclassifies, in the important event like Forest Fire, the cost is too high.
Temperature, Humidity
Estimating Accuracy
3
Intelligent System
Temperature, Humidity
Training Data
sets
Forest Fire Attribute
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)225
Hence, instead of relying on a single classifier, multiple classifiers are introduced. While doing so, the combination of classifiers overcomes the weaknesses exhibited by anyone classifier to a particular data set and helps to detect the Forest Fire more accurately by minimizing the problem of training and testing under conditions of large, insufficient and noisy data and the second one, management of uncertainty in the presence of unequal error costs. In this Forest Fire context, it is a good practice to consider Temperature and Humidity because very high temperature and low humidity are the key factors for Forest Fire.
VII. YAGER’S MODIFIED DEMPSTER’S RULE
The most prominent of the alternative combination rules is a class of unbiased operators developed by Ron Yager. Yager points out that an important feature of combination rules is the ability to update an already combined structure when new information becomes available. This is frequently referred to as updating and the algebraic property that facilitates this is associativity. Dempster’s rule is an example of an associative combination operation and the order of the information does not impact the resulting fused structure. Yager points out that in many cases a non-associative operator is necessary for combination. A familiar example of this is the arithmetic average [2]. The arithmetic average is not itself associative, i.e., one cannot update the information by averaging an average of a given body of data and a new data point to yield a meaningful result. However, the arithmetic average can be updated by adding the new data point to the sum of the pre-existing data points and dividing by the total number of data points. This is the concept of a quasi-associative operator that Yager introduced in. Quasi associativity means that the operator can be broken down into associative sub operations. Through the notion of quasi-associative operator, Yager develops a general framework to look at combination rules where associative operators are a proper subset. To address the issue of conflict, Yager starts with an important distinction between the basic probability mass assignment (m) and what he refers to as the ground probability mass assignment (designated by q). The major differences between the basic probability assignment and the ground probability assignment are in the normalization factor and the mass attributed to the universal set. The combined ground probability assignment is defined in equation 6.
q (A) = m1 (B) m2(C) B C = A (6)
Where, A is the intersection of subsets B and C (both in the power set P (X)), and q (A) denotes the ground probability assignment associated with A. Note that there is no normalization factor. This rule is known as Yager’s combination rule or sometimes Yager’s Modified Dempster’s Rule. Though the Yager rule of combination is not associative, the combined structure q (A) can be used to include any number of pieces of evidence. Through the quasi associativity that Yager describes, the combined structure q (A) can be updated based on new evidence [14]. This is performed by combining the ground probability assignment associated with the new evidence and the ground probability assignment of the already existing combination through the above formulas and then converting the ground probability assignments to basic probability assignments described below. As previously mentioned, one obvious distinction between combination with the basic and the ground probability assignment functions is the absence of the normalization factor (1-K). In Yager’s formulation, he circumvents normalization by allowing the ground probability mass assignment of the null set to be greater than 0, i.e.
q () ≥ 0 (7)
q () is calculated in exactly in the same manner as Dempster’s K (conflict). Then Yager adds the value of the conflict represented by q() to the ground probability
assignment of the universal set, q(X), to yield the
conversion of the ground probabilities to the basic probability assignment of the universal set mY (X):
m Y (X) = q() + q(X) (8)
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)226
Upon inspection of the two combination formulas it is clear that Yager’s rule of combination yields the same result as Dempster’s rule when conflict is equal to zero, (K= 0 or q() = 0). The basic algebraic properties that this rule satisfies are commutativity and quasi associativity, but not idempotence or continuity. The ground probability assignment functions (q) for the null set, , and an arbitrary set A, are converted to the basic probability assignment function associated with this Yager’s rule (mY) by:
m Y () = 0 (9) m Y (A) = q (A) (10)
The basic probability assignments associated with
Yager’s rule (mY) are not the same as with Dempster’s rule
(m). Yager provides the relation between the ground assignments and Dempster’s rule.
m () = 0 (11)
m (X) =q(X) / 1- q () (12)
m (A) = q (A) / 1- q () (13) for A ≠ , X
To summarize, these are the important attributes of Yager’s rule of combination:
1. The introduction of the general notion of quasi-associative operators and the expansion of the theoretical basis for the combination and updating of evidence where the associative operators are a proper subset of the quasi associative operators [17].The introduction of the ground probability assignment functions (q) and their relation to the basic probability assignments (mY) associated with Yager’s rule and the basic probability assignments (m) associated with Dempster’s rule.
2. The rule does not filter or change the evidence through normalization and The allocation of conflict to the universal set (X) instead of to the null set ().Thus mass associated with conflict is interpreted as the degree of ignorance where as the Dempster’s rule forgets all the mass that was lost to inconsistency between the bodies of evidence. This essentially ignores the conflict that may be present.
VIII. COMPARITIVE ANALYSIS AND RESULTS
Test results were carried out on Forest data containing temperature and humidity collected by sensor nodes. The data sets which were used in this analysis are the static data collected from the Forest Department [18].
The comparative analysis of Forest data in the form of confusion matrix for four classifiers namely, Support
Vector Machine denoted by SVM, SVMLight, SVMRBF and a
combination is shown in the Table No.1 below. The combination accuracy is high compared to individual classifier. This type of combination may override the difficulties of false diagnosing and is found to be accurate. According to the results taken the accuracy calculation of four test cases are as follows.
TABLEI
COMPARISONOFACCURACY
Test Nos.
SVM %
SVML
%
SVMRBF
%
Dempster %
Yager %
1 70 71 70 74 76
2 65 68 64 70 72
3 69 67 66 71 76
4 69 70 71 74 76
IX. CONCLUSION
A novel method is designed for classifying Forest Fire data by combining multiple classifiers and fusion of evidences using the Yager’s Modified Dempster’s Rule. The combination approach shall definitely yield better classification accuracy. The combination approach is reliable. The future work includes that this combination approach may be compared with other rules such as Inagaki’s unified combination rule for better accuracy. Also, other classifiers are considered for handling large data sets and for better performance.
REFERENCES
[1] Akyildiz.I.F, Sankarasubramaniam.Y, and Cayirci. E, “Wireless sensor networks: a survey,” Computer Networks, vol. 38, no. 4, pp. 393- 422, March, 2002.
[2] Guan Xin, Yi Xiao “ An Improved Dempster – Shafer algorithm for resolving the conflicting Evidences” International Journal of Information Technology Vol. 11 No. 12, 2005
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)227
[4] Jair Cervantes, Xiaoou Li, Wen Yu “Multi-Class SVM for Large Data Sets Considering Models of Classes Distribution” In proceeding of: Proceedings of The 2008 International Conference on Data Mining, DMIN 2008, July 14-17, 2008, Las Vegas, USA, 2 Volumes, 01/2008
[5] Ji.M.Q, Marefat. M and Lever. p.j, “An Evidential approach for recognizing shape features’ Proceeding of IEEE AIA 1995 [6] Joachims, T., (1997). “Text categorization with support vector
machines, Proceedings of the 1997 European Conference on Machine Learning” (ECML), vol. 1, pp. 3057-3069, 2004.
[7] Li.Z, Nadon.S, Cihlar. J, “Satellite detection of Canadian boreal forest fires: development and Zpplication of the algorithm,” International Journal of Remote Sensing, vol. 21, no. 16, pp. 3057-3069, 2000.
[8] Liyang Yu, Neng Wang, Xiaoqiao Meng “Real time Forest Fire detection using wireless sensor network” ©2005 IEEE
[9] Liu Rujie , Yuan Baozong “ D.S based Multi channel Information Fusion Method using classifiers Uncertainty measurement “ Proceedings of ICSP2000 pp 1297 – 1300.
[10] Lotfi A.Zadeh “Syllogistic Reasoning as a basis for Combination of Evidence in Expert systems” IJCAI 1985 417-419
[11] Li pan Hong Zheng S.Nahavandi “ The application of rough set and kohonen network to feature selection for object extraction”2003 International Conference on machine Learning and Cybermetrics.Nov2003.
[12] Mohamed Sathik.M, Balasubramanian.A, Syed Mohamed.M, “Fusion of Large data Sets in Forest Fire detection”, International Journal of Advanced Engineering Technology Journal of Engineering Research and Studies , 2011.
[13] Mohamed Sathik.M, Balasubramanian.A, Syed Mohamed.M, “Detection of Forest Fire in Wireless Sensor Network using Evidence Combination” International Journal of Current Research Vol. 2, Issue, 1, pp. 073-077, January, 2011.
[14] Mohamed Sathik.M, Syed Mohamed.M, Balasubramanian.A “Fire detection Using Support Vector Machine in Wireless Sensor Network and Rescue Using Pervasive Devices”, International Journal of Advanced Networking and Applications. Volume:02, Issue:02, Pages:636-639 (2010).
[15] Shafer.G “A Mathematical Theory of Evidence” Princeton University Press 1976.
[16] Zaiane..O.R, Antonie.M.L, Coman.A “Mammography Classification By An Association Rule based classifier “Proceeding of AMIA Annual Fall Symposium 1997.
[17] Ronald R. Yager “On the Representation of Non monotonic Relations in the Theory of Evidence”
[18] http://modis.gsfc.nasa.gov/, MODIS Web.
[19] http://www.nifc.gov / fireinfo / 2004 / index.html, “Wild Land Fire Season 2004 Statistics and Summaries,” National Interagency Coordination Center.