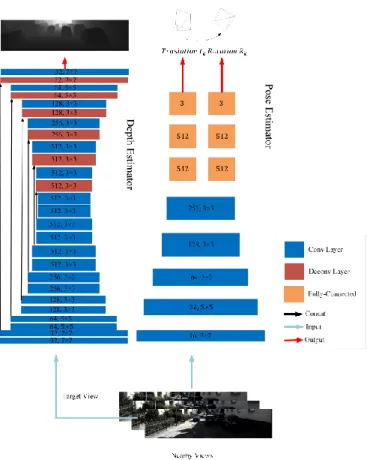
Simultaneous monocular visual odometry and depth reconstruction with scale recovery
Full text
Figure



Related documents
According to the results of regression analysis, the null hypothesis of the study is rejected because all the variables related to working capital negatively affect the
Further, by showing that v τ is a modular unit over Z we give a new proof of the fact that the singular values of v τ are units at all imaginary quadratic arguments and obtain
National Conference on Technical Vocational Education, Training and Skills Development: A Roadmap for Empowerment (Dec. 2008): Ministry of Human Resource Development, Department
This essay asserts that to effectively degrade and ultimately destroy the Islamic State of Iraq and Syria (ISIS), and to topple the Bashar al-Assad’s regime, the international
Standardization of herbal raw drugs include passport data of raw plant drugs, botanical authentification, microscopic & molecular examination, identification of
12 Data Science Master Entrepreneur- ship Data Science Master Engineering entrepreneurship society engineering. Eindhoven University of Technology
Minors who do not have a valid driver’s license which allows them to operate a motorized vehicle in the state in which they reside will not be permitted to operate a motorized
innovation in payment systems, in particular the infrastructure used to operate payment systems, in the interests of service-users 3.. to ensure that payment systems
