Volume 2, Issue 6, June 2013
ISSN 2319 - 4847
Volume 2, Issue 6, June 2013
Page 259
ABSTRACT
In this paper, Mathematical model & Simulink model of Paper machine headbox parameters have been developed & also designed Multivariable input multivariable output(MIMO) system for the same. The robustness of the headbox in terms of performance & stability has also been analysed through Matlab Simulink toolbox & determined the time characteristics of the system for regulated valve by changing position of regulating mechanism corresponding with incoming stock flow valve and incoming air flow valve to the headbox. Finally, Comparison is made with the classical controller PID.
Keywords: Headbox, robustness, air cushion, MIMO, simulink model
1.
INTRODUCTION
Robust control is used to analyse & design MIMO system with uncertain elements or if the control system meets its performance & stability objectives in the presence of all noises(model uncertainty) then the system is said to be robust. The paper machine headbox is a subsystem of paper making process. This is complex and nonlinear system in nature due to interaction of parameters like stock level, stock flow, total head, jet velocity, wire speed, air flow, & consistency of the stock. But in present investigation, stock flow, air pressure & stock level parameters are considered. The modeling of headbox is not possible in the presence of all parameters & disturbances or noises. The robust control is only choice to model the system in the presence of disturbances. So, system needs advance control strategy.
Paper is generally defined as a formed sheet consisting of fibers that have bonded into a flexible mat used as a substrate for writing or printing. Headbox, sometimes called the flow box is the backbone of paper making process. The paper machine headbox consists of three sections: Inlet manifold, Headbox pond section, and Slice.
2.
PAPER MACHINE HEADBOX
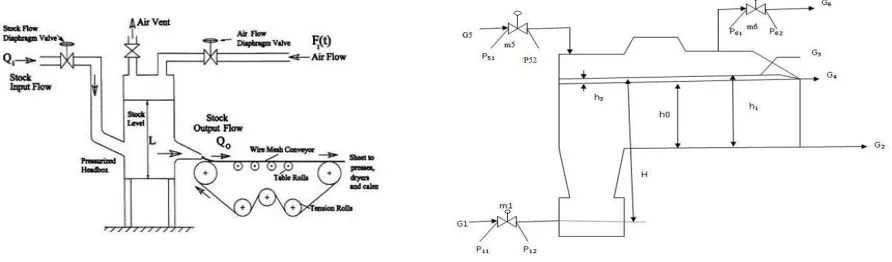
The function of headbox is to take the stock delivered by fan pump and transform the pipe flow into a uniform rectangular flow equal in width to the paper machine wet end section, spread stock at a uniform velocity in the machine direction and match approximately the slurry speed at the jet (spouting velocity) with forming section speed (called wire speed).
There are mainly two types of headbox: open type Headbox (open to atmosphere) and pressurized Headbox (enclosed).The open headbox was generally used earlier older slow speed paper machine (600-800 ft/min) requiring a variation of approximately 14.5 inches in level to change corresponding jet velocity. For higher speeds (at least greater than 1000ft/min, 3000-5000ft/min) a level change hundreds of inches of water was
necessary to produce the required spouting velocity. In such situation it is impossible to control cross-flow currents or ensure that all fibre aggregates are broken up before reaching the slice opening. This made practically
impossible to operate open headbox. To overcome these deficiencies, one has to use enclosed headbox. The later is again classified into two types- Air cushion headbox & Hydraulic headbox, shown in fig. 1.
3.
MODELING OF HEADBOX
Mathematical modeling of pressurised headbox for high speed paper machines is divided into three zones namely
Portion of box filled with stock, Space above stock surface filled with air and overflow system9. The dynamic equation
of all three zones is based on mass and energy balance principle. In present work stock level, over flow& air flow control strategies are used in controlling the headbox operation to achieve optimum performance and maintaining the consistency of paper. The mathematical modeling of all three zones is as follows
Robust control of Non Linear Parameters
of Paper machine Headbox
1
Kumar Rajesh and 2Mandeep Guleria
1&2
Deptt. of Instrumentation & Control Engg. Graphic Era University, 566/6, bell road , Clementtown,
Volume 2, Issue 6, June 2013
Page 260
Figure 1 Air cushion/padded headbox[1] Figure 2 Modeling structure of pressurized headbox
3.1 Portion of headbox filled with stock
The dynamic equation for stock level is derived on the basis of Mass/Energy balance equation. TL.d(ν1)/dt+A.ν1=μ1-B.ρ (1)
Where TL = (V1. ρz )/ G1max ( time constant for flow box for level of stock in the box)
μ1=Δm1/m1max , ρ= Δp/po , ν1= Δh1/h1o,(Index o indicates the fixed value of given quantity)
3.2 Overflow System
TO.d(ν2)/dt+C.ν2=E.ν1-D.ρ (2)
Where TO = (V1.ρz )/ G4o ( time constant for flow box for stock level in the overflow pipe),
v2= Δh2/h2o, relative change in level of stock in overflow channel
3.3 Space above stock surface filled with Air
TAρ. d (ρ)/dt +F.ρ = μ5 + TA1. d( ν1)/dt +TA2.d(ν2)/dt. (3)
where
TAρ=(V3.ρp)/G5max (time constant of flow box for air cushion)
μ1=Δm5/m5max, ρp=density of air
TA1=(V1.ρp)/ G5max
TA2=(V2.ρp)/ G5max
After solving equs 1, 2 & 3,one get
ν1 =M1.μ1 – M2.ρ (4a)
ρ =M3. ν1+M4.μ5 (4b)
where symbol M1,M2,M3,M4 denote as functions of expression determined:
M1 = 1/(TL.S+A)
M2 = B/( TL.S+A)
M3={TA2.S(TO.S+C)+E.TA2.S}/{TAρ. TO.S2 +( TAρ.C+ TA2.D+ TO.F).S+F.C}
M4={TO.S+C}/{TAρ.TO.S2+(TAρ.C+TA2.D+ TO.F).S+F.C}
Finally from the analysis of equation (4a&4b), the value of ν1and ρ are related with process conditions (μ1 & μ5)
ν1 =W1.μ1 – W2. μ5 (5a)
ρ = W3. µ1+W4.μ5 (5b)
Putting µ5=0, equn 5a, & 5b become
ν1 =W1(s).μ1 (6a)
ρ =W3(s). µ1 (6b)
where
W1(s)={(Taρ.TO.S2+(Taρ.C+Ta2.D+ TO.F).S
+F.C)}/(aS3+bS2+C.S+A.F.C)
W3(s)={(TA1.TO.S2+(TA2.E+TA1.C).S)}/
(aS3 +bS2+c.S+A.F.C)
Putting µ1=0 , equn 5a & 5b become
ν1 =W2(s).μ5 (7a)
ρ =W4(s). µ5 (7b)
where
W2(s)={(B.TO.S+B.C)}/(aS3+bS2+C.S+A.F.C)
W4(s)={(TL.TO.S2+(TO.A+TL.C).S+A.C)}/(aS3+bS2+c.S+A.F.C)
Where symbols in the above figure represent:
Volume 2, Issue 6, June 2013
ISSN 2319 - 4847
Volume 2, Issue 6, June 2013
Page 261
G1 = incoming stock to the flow box.
G2= outgoing stock from the stock
G3 = flow in overflow line.
G4 = overflow in channel
G5 =amount of air supplied to flow box
G6 = amount of air out from flow box
m1= incoming stock regulating valve.
m5= incoming air regulating valve.
m6= outgoing air regulating valve.
In order to fix the dynamic properties of flow box one determines the time characteristics of the system for each
regulated valve by changing position of regulating mechanism corresponding with µ1=0 and µ5 =0.
Equation determining v1and ρ are having the form given below:
Case-I: when (µ5 =0), the modeling equation of v1 & ρ
v1=0.207-0.092.e-0.00423t-0.206.e-0.518t +0.095.e-0.62t ... (8a)
ρ =1.748.e-0.00423t -0.002.e-0.518t -1.75.e-0.62t (8b) Case-II: when (µ1 =0), the modeling equation of v1 & ρ
v1 =-0.0737 +0.045.e-0.00423t - 0.0027.e-0.518t+0.031.e-0.062t (9a)
ρ =1.33 -0.807.e-0.00423t +0.004.e-0.518t – 0.528.e-0.062t (9b)
4.
Simulink Model:
The Simulink model for equation (8a & 8b) has been developed, shown in fig. 3 & 4.
2 v1' 1 rho1 v1 u1 rho -.004s +1.074s2
s +1.14s +.325s+.001353 2
W3 .052s +.037s+.000282 s +1.14s +.325s+.001353 2
W1 2 rho ' 1 v1 ' v1 u5 rho .0 33 s +.01 87 s+.000 182
s +.5 84 s +.03 44 9s+.0 001 353 2
W4 -.00 103 s-.000 01 s +.584 s +.0 344 9s+.0 00 1353 2
W2
Figure 3 Simulink model for v1&ρ, whenµ5=0 Figure 4 Simulink model for for v1&ρ, whenµ1=0
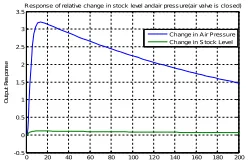
Fig.3 is the Matlab Simulink model of the headbox operation, controlling the relative stock level(v1) and relative air
pressure inside the flow box(ρ), when the regulating air valve ,µ5=0. From the figure 5, it is analyzed that the v1 is
unstable with time and ρ becomes stable with time. Figure.6 revealed that the parameter v1and ρ is unstable with time.
v1 shows negative response with time, since the incoming air valve(µ5) is open and stock incoming valve( µ1) is closed ,
which causes ρ to increases with time.
0 20 40 60 80 100 120 140 160 180 200
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 Time O u tp u t R e s p o n s e
Response of relative change in stock level andair press ure(air valve is closed)
Change in A ir Pressure Change in S tock Level
-0.60 20 40 60 80 100 120 140 160 180 200 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 time o u tp u t re s p o n s e
Simulation results of relative change in air pressure when stock valve is closed
air pressure stock level
Figure 5 Variation of v1& ρ with t, µ5=0 Figure 6 Variation of v1& ρ with t,µ1=0
2 v1 ' 1 rh o' v1 u 5 rh o . 033 s +.0 187 s+ .00 017 922
s +.5 84 s + .03 44 s+. 000 13 53 2 W4 -. 001 03 s-.0 00 1 s +.5 84 s + .03 44 s+. 000 13 53 2
W2
PID(s) P ID Con tro lle r1
P ID(s) P ID Con tro ller
2 v1' 1 rho1 v1 u1 rho -.004s +1.074s2
s +1.14s +.325s+.001353 2 W3 .052s +.037s+.000282 s +1.14s +.325s+.001353 2
W1
PID(s) PID Controller1 PID(s) PID Controller
Figure 7 Simulink model with PID controller Figure 8 Simulink model with PID Controller
Volume 2, Issue 6, June 2013
Page 262
0 20 40 60 80 100 120 140 160 180 200
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Time
C
o
n
tr
o
ll
e
d
O
u
tp
u
t
Closed loop response of Stock Level (stock valve is closed)
0 20 40 60 80 100 120 140 160 180 200 0
0.2 0.4 0.6 0.8 1 1.2 1.4
Time
C
o
n
tr
o
lle
d
O
u
tp
u
t
Closed loop response of Air Pressure(air valve is clos ed)
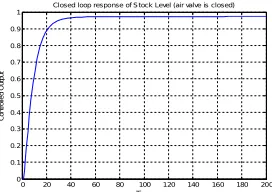
Figure 9 Closed loop response of v1 ,when Figure 10 Closed loop response of ρ,when μ5=0
μ 5=0
5.
SIMULINK MODEL WITH PID CONTROLLER
Tuning method is used to adjust the classical PID controller parameters in the simulation model of fig.3 & fig.4 & get optimized response. Fig.9 reveals that the performance of the system in terms of settling time and rise time is reduced significantly, which improves the response of the process.
Fig.10 reveals that the performance of the system in terms of process rise time is reduced but shows maximum overshoot.
0 20 40 60 80 100 120 140 160 180 200
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Time
C
o
n
tr
o
lle
d
O
u
tp
u
t
Closed loop response of Air Pressure (stock valve is closed)
0 20 40 60 80 100 120 140 160 180 200
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Time
C
o
n
tr
o
lle
d
O
u
tp
u
t
Closed loop response of Stock Level (air valve is closed)
Figure 11 Tuned response of the v1,when Figure 12 Closed loop response of the ρ,when μ1=0
μ1=0.
The performance of the tuned system shows rise time of the order of 149s, settling time of the order of 529s, and maximum overshoot of the order of 7.63 percent.
Fig.11 shows that maximim overshoot decreases for the tuned response but the settling time and rise time increases comprehensively due to the addition of external disturbances and noise.
6.
LIMITATIONS OF PID CONTROL
PID controllers are work satisfactorily to many control problems, but they can perform poorly in some applications, and do not in general provide optimal control. The fundamental difficulty with PID control is that it is a feedback system, with constant parameters, and no direct knowledge of the process,and thus overall performance is reactive. PID control is the best controller with no model of the process; better performance can be obtained by incorporating a model of the process. Hence, robust control is used for the headbox model parameters.
7.
ROBUST CONTROL FOR HEADBOX PARAMETERS
Robustness is of high importance in control system design because real work environments are more prone to external disturbances and noise. More, there are always differences between calculated mathematical models used for design and actual system. The following robust control program is developed for controlling stock level, air pressure and overflow parameters of headbox of paper making industry.
# Program for robust control of v1and ρ(headbox parameters) #
s=zpk('s');
u1=ureal('u1',1,'percent',20); u5=ureal('u5',1,'percent',20);
w1=(0.0528*s^2+0.037*s+0.00028)/(s^3+1.14*s^2+0.325*s+0.00135);
w2= (-0.00103*s-0.0001)/(s^3+0.584*s^2+ 0.03449*s+0.000135);
w3=(-0.004*s^2+1.074*s)/(s^3+1.14*s^2+0.325*s+0.00135);
w4=(0.033*s^2+0.0187*s+0.000179)/(s^3+1.14*s^2+0.325*s+0.00135);
Volume 2, Issue 6, June 2013
ISSN 2319 - 4847
Volume 2, Issue 6, June 2013
Page 263
T=[v1;rho];
C=100*ss((s+1)/(.001*s+1))^3; L=T*C;
F=feedback(L,1); Fnom = zpk(F.nominal);
maxrealpole = max(real(pole(Fnom)))
[StabilityMargin,Udestab,REPORT]=robuststab(F) [PeakGain,Uwc] = wcgain(F);
Fwc = usubs(F,Uwc); subplot(2,1,1); Frand = usample(F,4);
bodemag(Frand,'b',Fwc,'r',{10 1000}); subplot(2,1,2);
step(Frand,'b',Fwc,'r',0.1)
8.
STABILITY MARGIN ANALYSIS (ROBUSTNESS)
To check the feedback loop (F) remain stable for all possible values of u1,u5 in the specified uncertainty range(20%) ,
we use the robuststab function . The robuststab function computes the stability margins and the smallest destabilizing parameter variations in the variable Udestab (relative to the nominal values):Basic syntax
[Stability Margin, Udestab, REPORT] = robuststab (F);
The report is obtained from the above program by running the program in Matlab application.The Upper Bound for Stability Margin comes out to be 5.3772 and Lower Bound 3.9189.Here both upper bound and lower bound comes out to be greater than one , hence the system is stable. The destabilizing frequency at which instability occurs comes out to be 0.0001851, which more rarely causes the instability. The value of u1 and u2 comes out to be -0.0017 and -0.0754
respectively at the destabilizing frequency.
The report reveals that the system can tolerate near about 4 times as much variability in u1 and u5 before going beyond
the stability margin. The frequency at which system becomes unstable is 0.000185 rad/s.
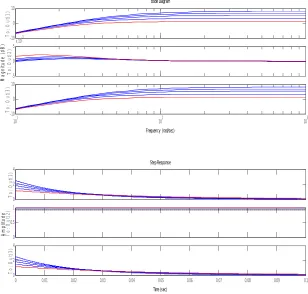
8.1 Worst-Case Performance Analysis:
The Bode plot and Step response have been obtained for v1(relative change in stock level inside flow box, ρ(relative
change in air pressure) and L (Process ).
-10 0 10
T
o
:
O
u
t(
1
)
-5 0 5x 10
-3
T
o
:
O
u
t(
2
)
101 102 103
-10 0 10
T
o
:
O
u
t(
3
)
Bode Diagram
Frequency (rad/sec)
M
a
g
n
it
u
d
e
(
d
B
)
0 2 4
T
o
:
O
u
t(
1
)
0 0.5 1
T
o
:
O
u
t(
2
)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
0 2 4
T
o
:
O
u
t(
3
)
Step Response
Time (sec)
A
m
p
lit
u
d
e
Volume 2, Issue 6, June 2013
Page 264
The figure 13 above shows the worst case performance analysis of head box parameters v1(relative change in stock
inside flow box) and ρ (relative change in air flow). The four random samples are generate for the feedback loop (F).The blue lines indicate performance of four random variables and red lines shows the worst case performance of the process. From graph it is analyse that uncertain model of Headbox under worst case conditions remain within the stability margin.
CONCLUSIONS
The uncertain headbox model which is modelled and simulated by equation 8 & equation 9 (Chapter 5) has been robustly controlled upto four times the modelled uncertainty. The max real pole for the process transfer function has the value of -0.000171, which lies on the left half of s plane, ensure the stability of the process.The robust control is best suited for multivariable non linear system as it removes the complexity and additional cost of sensor employs in classical P, PI, PD and PID controller.
Hence , the uncertainty in the manipulating variables i.e. µ1andµ2 are controlled for stock level and relative change in
air pressure inside the flow box.Also, the system is perform significantly good under worst conditions such as unpredictable noise and disturbances.
REFERENCES
[1] Kumar Rajesh1& A.K.Ray, “Artificial Neural Network Modelling And Control Of Retention Process In The Wet
End”. International Journal of Information Technology and Knowledge Management, July-December 2010, Volume 2, No. 2, pp. 259-264
[2] A. I Nissinen, H. N Koivo and T. J Huhtelin, “Headbox control using multivariable PI controller
implemented in distributed automation system”, in Control Systems '96, Preprints, Canada: Canadian Pulp and Paper Association, 1996, pp. 95-98
[3] G.Glan Devadhas, “Robust Temperature Controller Design For A Chemical Process”. International Journal of
Engineering Science and Technology, 2010, Vol. 2(10), pp. 5831-5837
[4] John B.Rudd, Manager, Advanced Application Technology Group, Alabama 36691
[5] Desmond Yan and Mehrdad Saif, “Neural Network Based Controllers for Non-Linear systems”. Simon Fraser
University, Burnaby, B.C., Canada.V5A IS6.
[6] W Kikiwitch, “Paper Making Process”, Handbook.
[7] Ed Graf, “Headbox Maintenance And Operational Problems That Affect Performance”. A. P. M., LLC.910
Gunnlaugsson Drive, Washington Island.
[8] Wietz Wolfganz, Dehiasis Francesco, Chowdhery Ranajoy, “Smart Paper Machine Upgradation”. IPPTA .J.Vol24,
No.1,Jan-March,2012.
[9] Kikiewich Z., and Panday, R.S.D., Theory and design of paper machine, vol.-I,Tara book agency varanasi,1983.
AUTHOR
Dr. Rajesh Kumar received Ph.D degree in Instrumentation & Control Engg. from I.I.T.Roorkee in