A MATLAB Simulation Study of Automatic
Generation Control of Three Area Power System
Pardeep Kumar Nipun Aggarwal
M. Tech. Student Assistant Professor
Indus Institute of Engineering & Tech. Kinana, Jind (Haryana)
Indus Institute of Engineering & Tech. Kinana, Jind (Haryana)
Abstract
In this paper, a MATLAB simulation study of automatic generation control of three area interconnected power system done. All the three area have unequal capacity with reheat turbine. An evolutionary computing approach particle swarm particle for determining the optimal values for the proportional integral controller parameters of automatic generation control (AGC) and this optimized gain is used in MATLAB simulation. And simulation result of three area is discussed.
Keywords: Automatic Generation Control (AGC), Particle Swarm Optimization, Integral Controller, MATLAB Simulation, Optimal Control
________________________________________________________________________________________________________
I. INTRODUCTION
The concept of automatic generation control was first developed through a control loop meant only for a control area. Modern power system consists of number of utilities interconnected together and power is exchanged between utilities over tie-lines by which they are connected. In order to achieve interconnected operation of a power system, an electric energy system must be maintained at a desired operating level characterized by nominal frequency, voltage profile and load flow configuration. The main objective of power system operation and control is to maintain continuous supply of power with an acceptable quality, to all the consumers in the system. The system will be in equilibrium, when there is a balance between the power demand and the power generated [1]. As the power in AC form has real and reactive components: the real power balance; as well as the reactive power balance is to be achieved. The control objective was to drive measured control area net interchange to a given scheduled value and to raise and lower contact closures according to actuating signal through governor speed changer motor was the control mechanism. The same raise or lower pulse was simultaneously broadcasted to each unit on control area even though the duration of each pulse could manually be adjusted to recognize individual size and/or ability to regulate [2]. Generation was blindly raised or lowered to force net interchange to the desired value. If unit generation output was telemetered to the dispatch office, it was trended on a strip chart and used for area load calculation but not used for any unit oriented control loop. To complete the design of this early area controller, a frequency dependent bias for the scheduled net interchange was developed that modeled the change in actual area net interchange caused by area governor response and load change due to deviation from nominal frequency [3]. This allowed AGC (supplementary control) to position unit governor speed changers so that when system frequency returned to nominal, the area’s generation and load and hence actual interchange would adjust to the proper level via the governor control; i.e., without need for addition a supplemental control. This area tie-line bias control mechanism has been in constant use ever since with slight modifications for continuous time error correction. Through the years, unit output control loops were added to AGC, and power plant computers that control unit output and digital governors were also added to the overall control scheme but the basic goal of performing area closed loop control has remain unchanged [4]. The AGC schemes have evolved over the past six decades. This is based on tie-line load bias control concept, and there are two variables of interest namely, frequency and tie-line power exchanges. Their variations are weighted together by a linear combination to a single variable called ACE. The continuous advancement in the design and implementation of AGC strategies has enabled power engineers to deal AGC problem more efficiently and effectively.
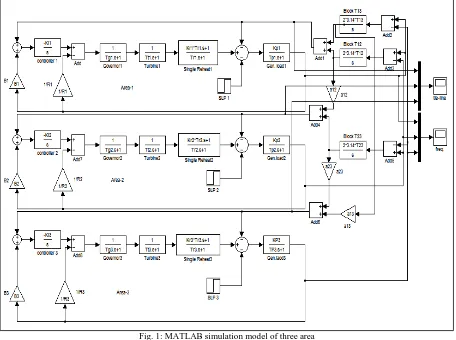
II. SYSTEM INVESTIGATED
Fig. 1: MATLAB simulation model of three area
Mathematical Model Derivation: The state space equations for three-area thermal system are as follows
1 1
x f x2 Pr1 x3 Pt1
4 g1
x P x5 f2 x6 Pr2 x7 Pt2 x9 f3 x1 0 Pr3 x1 1 Pt 3
12 g3
x P x13 Ptie line 12
14 tie line13
x P
x16 Pc1 x17 Pc2 x18 Pc3 w1 Pd1 w2 Pd2 w3 Pd3
1 1 1 1
1 1 2 13 14 1
1 1 1 1 1
1 P S P S P S P S
P S P S P S P S P S
K K K K
x x x x x w
T T T T T
1 1
2 2 3 4
1 1 1 1
1 1
( r ) r
r r t t
K K
x x x x
T T T T
3 3 4
1 1
1 1
t t
x x x
T T
4 1 4 16
1 1 1 1
1 1 1
sg sg sg
x x x x
R T T T
2 2 2 2
5 5 6 12 13 15 2
2 2 2 2 2
1 PS PS PS PS
PS PS PS PS PS
K K K K
x x x a x x w
T T T T T
2 2
6 6 7 8
2 2 2 2
1 1
( r ) r
r r t t
K K
x x x x
T T T T
7 7 8
2 2
1 1
t t
x x x
T T
8 5 8 17
2 2 2 2
1 1 1
sg sg sg
x x x x
R T T T
3 3 3 3
9 9 10 23 15 13 14 3
3 3 3 3 3
1 PS PS PS PS
PS PS PS PS PS
K K K K
x x x a x a x w
T T T T T
3 3
10 10 11 12
3 3 3 3
1 1
( r ) r
r r t t
K K
x x x x
T T T T
11 11 12
3 3
1 1
t t
x x x
T T
12 9 12 18
3 3 3 3
1 1 1
sg sg sg
x x x x
R T T T
1 3 2 1 2 1 2 1 2 5
x T x T x
1 4 2 1 3 1 2 1 3 9 x T x T x
1 5 2 2 3 5 2 2 3 9
x T x T x
1 6 1( 1 1 1 3 1 4)
x K i B x x x
1 7 2 ( 2 5 1 2 1 3 1 5) x K i B x a x x
1 8 3( 5 9 1 3 1 4 2 3 1 5) x K i B x a x a x
Above equation are arranged in vector matrix form called as the ‘State Equation’:
x Ax Bu Fw
Where, A(18X18) is State Matrix B(18X3) is control Matrix F(18X3) is Disturbance Matrix
Equation of Power System Models in Discrete Form for Integral Controller
State space equations for power system models under consideration have been obtain in above section. For optimization the gain of integral control by PSO with MATLAB programming, the power system equations are required in discrete form, which have been obtained as given below. Sampling time is 0.01second and ‘n’ denotes the sample number (iteration number).
III. PARTICLE SWARM OPTIMIZATION
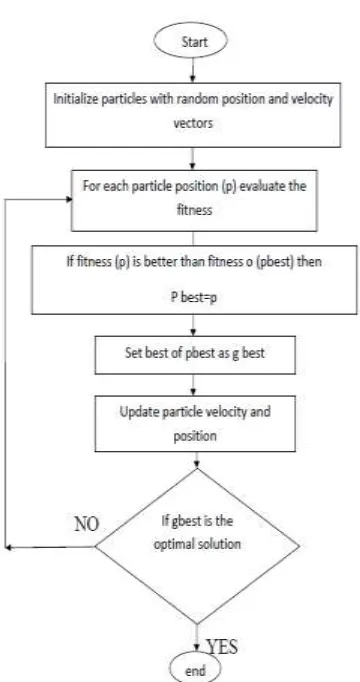
Particle swarm optimization (PSO) is a population based stochastic optimization technique developed by Dr. Kennedy and Dr. Eberhart in 1995, inspired by social behavior of bird flocking or fish schooling. PSO shares many similarities with evolutionary computation techniques such as Genetic Algorithms (GA). The system is initialized with a population of random solutions and searches for optima by updating generations. However, unlike GA, PSO has no evolution operators such as crossover and mutation. In PSO, the potential solutions, called particles, fly through the problem space by following the current optimum particles. The detailed information will be given in following sections. Compared to GA, the advantages of PSO are that PSO is easy to implement and there are few parameters to adjust. PSO has been successfully applied in many areas: function optimization, artificial neural network training, fuzzy system control, and other areas where GA can be applied.
PSO as an optimization tool, provides a population-based search procedure in which individuals called particles change their position (states) with time. In a PSO system, particles fly around in a multi-dimensional search space. During flight, each particle adjusts its position according to its own experience and the experience of neighbouring particles, making use of the best position encountered by it and neighbours. The swarm direction of a particle is defined by the set of particles neighbouring the particle and its history experience. Instead of using evolutionary operation to manipulate the individuals, like in other evolutionary computational algorithms, each individual in PSO flies in the search space with a velocity which is dynamically adjusted according to its own flying experience and its companions flying experience. Let p and v denote a particle’s co-ordinate (position) and its corresponding flight speed(velocity) in a search space respectively. Therefore, each 𝑖𝑡ℎ particle is treated as a volume less particle, represented as 𝑝𝑖=(𝑝𝑖1,𝑝𝑖2,…, 𝑝𝑖𝑑) in the 𝑑-dimensional space. The best previous position of the 𝑖𝑡ℎ particle is recorded and represented as 𝑝𝑏𝑒𝑠𝑡𝑖=(𝑝𝑏𝑒𝑠𝑡𝑖1, 𝑝𝑏𝑒𝑠𝑡𝑖2,…….. 𝑝𝑏𝑒𝑠𝑡𝑖𝑑). The index of the best particle among all the particles is treated as global best particle, is represented as 𝑔𝑏𝑒𝑠𝑡𝑑. The velocity for the 𝑖𝑡ℎ particle is represented as 𝑣𝑖 = (𝑣𝑖1, 𝑣𝑖2, ……..., 𝑣𝑖𝑑).
The modified velocity and position of each particle can be calculated using the current velocity and the distance from pbesti to
gbestd. Flow chart of PSO.
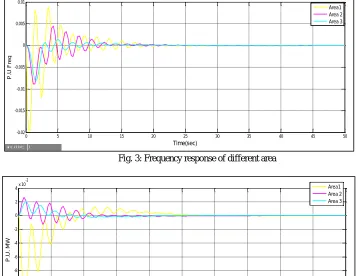
IV. RESULT
In this case, three-area control system is unequal and consists of thermal system with reheat turbine. MATLAB is used to obtain dynamic response for ∆f1, ∆f2, ∆f3, ∆Ptie_line1-2, ∆Ptie_line1-3, and ∆Ptie_line2_3 for 1% step load perturbation (SLP) in either area. The MATLAB simulation model of a conventional three-area system is shown in Fig. 1. By the use of PSO we have find the optimized value of integral controller Ki1= 0.414, Ki2=0.195, Ki3= 0.849 respectively.
Fig. 3: Frequency response of different area
Fig. 4: Tie-Line response of different area.
0 5 10 15 20 25 30 35 40 45 50
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01
Time(sec)
P
.U
F
re
q
Area1 Area 2 Area 3
0 5 10 15 20 25 30 35 40 45 50
-14 -12 -10 -8 -6 -4 -2 0 2 4x 10
-3
Time(sec)
P
.U
.
M
W
V. CONCLUSION
In this paper, AGC of three-area unequal thermal-thermal power system is presented. PSO technique is used to optimize the controller gains. The optimization of gain is used in MATLAB simulation model. In the three-area power system the frequency and tie-line power deviation responses are obtained for 1% SLP. It is found that frequency and tie line power deviation responses settle with zero steady state error and satisfy the AGC requirements.
REFERENCES
[1] Nathan Cohn, ―Power flow control-basic concepts for interconnected systems,‖ Electric Light and Power, Vol. 28, No. 8, pp. 82-94, 1950. [2] N. Cohn, ―Some aspects of tie-line bias control on interconnected power systems,‖ AIEE Trans., Vol. 75, pp. 1415-1436, Feb. 1957. [3] N. Cohn, Control of Generation and Power Flow on Interconnected Systems, New York: Wiley, 1961.
[4] Nathan Cohn, ―Methods of controlling generation on interconnected power systems‖, Electrical Engineering, pp. 202-209, March 1961. [5] N. Cohn, ―Considerations in the regulation of interconnected area,‖ IEEE Trans., Power Systems, PAS-86, pp. 1527-1538, Dec. 1967.
[6] N. Cohn, ―Techniques for improving the control of bulk power transfers on interconnected systems,‖ IEEE Trans., Power Apparatus and Systems, PAS (90), pp. 2409-2419, Nov./Dec. 1971.
[7] Nathan Cohn, ―Recollections of the evolution of real time control applications to power systems‖, Automatica, Vol. 20, No. 2, pp. 145- 162, 1984. [8] C. Concordia & L. K. Kirchmayer, ―Tie line power and frequency control of electric power systems,‖ AIEE Trans., 72, Pt.- III, pp. 562-572, June 1953. [9] C. Concordia & L. K. Kirchmayer, ―Tie line power and frequency control of electric power systems‖, AIEE Trans., 73, Pt.-II, pp. 133- 146, April 1954. [10] C. Concordia, L.K. Kirchmayer & E.A. Szymanski, ―Effect of speed governor dead-band on tie-line power and frequency control performance,‖ AIEE
Trans., Power Apparatus and Systems, 76, pp. 429-435, Aug. 1957.
[11] G. Quazza, ―Non-interacting controls of interconnected electric power systems,‖ IEEE Trans., Power Apparatus and Systems, PAS (85), pp. 727-741, July 1966.
[12] C. W. Ross, ―A comprehensive direct digital load frequency controller,‖ Proc. IEEE, PICA Conference, Pittsburg, pp. 231-238, 1967.
[13] C. W. Ross & T. A. Green, ―Dynamic performance evaluation of a computer controlled electric power system,‖ IEEE Trans., Power Apparatus and Systems, 91, pp. 1156-1165, 1972.
[14] J. Carpentier, To Be or Not to Be Modern, that is the question for automatic generation control (point of view of a utility engineer),‖ International Journal of Elect. Power and Energy Systems, Vol. 7(2), pp. 81-91, April 1985.
[15] N. Jaleeli, L. S. Vanslyck, D. N. Ewart, L. H. Fink & A. G. Hoffmann, ―Understanding automatic generation control,‖ IEEE Trans., Power Apparatus and Systems, PAS-7 (3), pp. 1106-1122, August 1992.
[16] J. E. Van Ness, ―Root loci of load frequency control systems,‖ IEEE Trans., Power Apparatus and Systems, PAS (82), pp. 712-726, 1963.
[17] W. R. Barcelo, ―Effect of power plant response on optimum load frequency control system design,‖ IEEE Trans., Power Apparatus and Systems, PAS(92), pp. 254-258, 1973.
[18] T. E. Bechert & N. Chen, ―Area automatic generation control by multi-pass dynamic programming,‖ IEEE Trans., Power Apparatus and Systems, PAS-96, No. 5, pp. 1460-1468, Sept./ Oct. 1977
[19] O. I. Elgerd & C. Fosha, ―Optimum megawatt frequency control of multi-area electric energy systems,‖ PAS-89 (4), pp. 556-563, April 1970. [20] J. Nanda & B. L. Kaul, ―Automatic generation control of an interconnected power system‖, Proc. IEE, 125(5), pp. 385-390, May 1978.
[21] J. L. Willems, ―Sensitivity analysis of the optimum performance of conventional load frequency control,‖ IEEE Trans., Power Apparatus and Systems, PAS (93), No. 5, pp. 1287-1291, Sept/Oct 1974.