R E S E A R C H
Open Access
A diffusive predator-prey system with prey
refuge and gestation delay
Ruizhi Yang
*, Haoyu Ren and Xue Cheng
*Correspondence:
[email protected] Department of Mathematics, Northeast Forestry University, Harbin, Heilongjiang 150040, China
Abstract
The dynamics of a diffusive predator-prey system with prey refuge and gestation delay is investigated in this paper. For a non-delay system, global stability, Turing instability and Hopf bifurcation are studied. For a delay system, time delay induced instability and Hopf bifurcation are discussed. By the theory of normal form and the center manifold method, the direction and stability of the bifurcating periodic solution are discussed.
MSC: 34K18; 35B32
Keywords: predator-prey; prey refuge; delay; Turing instability; Hopf bifurcation
1 Introduction
Population biology is an important subject in both ecology and mathematical ecology. And predator-prey model is one of the most interesting and popular areas in population biology. Many scholars have done a lot of work in it and derived some important results [–].
Generally, prey-predator models can be written as the following form: ⎧
⎨ ⎩
du
dt =uf(u) –g(u,v)v, dv
dt =cg(u,v)v–θv,
(.)
whereu(t) andv(t) represent prey and predator densities at timet, respectively.f(u) repre-sents the prey growth law in the absence of predators, andg(u,v) is the functional response of predators to prey density (the average feeding rate of a predator). Parameterscandd
represent the conversion rate from prey to predator and the death rate of predator. In predator-prey models, the functional response of predators to prey density is essen-tial, and it can enrich the dynamics of predator-prey systems. In ecology, many factors, such as prey escape ability, predator hunting ability and the structure of the prey habi-tat, can affect functional responses [, ]. Generally, functional responses can be divided into the following types: prey-dependent (such as Holling I-III []) and prey-predator-dependent (such as Beddington-DeAngelis [], Crowley-Martin [], Hassel-Varley []). Recently, more and more researchers have suggested that prey-predator-dependent functional responses are more suitable and can enrich the dynamics of predator-prey sys-tems [–]. Hsu et al. studied the global property of a general predator-prey model with
Hassell-Varley type functional response []. Cantrell and Cosner discussed some dynam-ical properties of predator-prey models with Beddington-DeAngelis functional response []. Tripathi et al. considered the permanence, non-permanence, local asymptotic sta-bility and global asymptotic stasta-bility of equilibria of delayed predator-prey models with Crowley-Martin functional response []. Skalski and Gilliam suggest that Beddington-DeAngelis or Hassell-Varley functional responses are suitable for the case where predator feeding rate becomes independent of predator density at high prey density, and Crowley-Martin model is suitable for the case where predator feeding rate is decreased by higher predator density even when prey density is high [].
In predator-prey models, prey refuge is one of the important factors, and many re-searchers have studied it. In [], Sharma and Samanta studied a Leslie-Gower model with disease and refuge in prey, including the positivity and boundedness of solutions, and the stability of equilibria. In [], Tripathi et al. considered a delayed predator-prey model with Beddington-DeAngelis functional response and prey refuge. They studied local and global asymptotic stability of various equilibria and time delay induced Hopf bifurcation. In [], Chen et al. investigated the effect of prey refuge on a Leslie-Gower predator-prey model. They suggest that prey refuge has no influence on the persistent property of this model, but it can affect the prey and predator densities. Most of works suggest that prey refuge has a stabilizing effect on the prey-predator model [–]. In [], Tripathi et al. studied a predator-prey model with Beddington-DeAngelis type functional response incorporating a prey refuge, that is,
⎧ ⎨ ⎩
du
dt =u( –u–
a(–m)v +b(–m)u+cv), dv
dt =v(
e(–m)u +b(–m)u+cv–θ),
(.)
with the initial conditionsu() =u> ,v() =v> , which are biologically meaningful. mis the prey refuge rate. Tripathi et al. studied local and global stability of various bound-ary equilibria and coexisting equilibria. Using some data, they also discussed the inverse problem of estimation of a model parameter.
In recent years, since predators and their preys distribute inhomogeneously in differ-ent spatial locations at timet, many researchers have studied predator-prey systems with diffusion term. Predator-prey systems with diffusion term may exhibit richer dynami-cal properties, including Turing instability, pattern formation, spatially inhomogeneous periodic solutions etc. [–]. In [], Tang and Song considered a delayed diffusive predator-prey model with herd behavior and analyzed the stability and Hopf bifurcation. In [] the authors considered the spatial, temporal and spatiotemporal patterns of dif-fusive predator-prey models with mutual interference. In [], Jia and Xue discussed the effects of the self- and cross-diffusion on positive steady states for a generalized predator-prey system. In this paper, we will study the effect of diffusion on system (.).
Motivated by above, we propose the following system:
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
∂u(x,t)
∂t =du+u( –u–
a(–m)v
+b(–m)u+cv), x∈,t> , ∂v(x,t)
∂t =dv+sv(
(–m)u(t–τ)
+b(–m)u(t–τ)+cv(t–τ)–d), x∈,t> , ux(x,t) = , vx(x,t) = , x∈∂,t> ,
u(x,t) =u(x,t)≥, v(x,t) =v(x,t)≥, x∈,t∈[–τ, ],
wheres=e,d=θ/e,= (,lπ), (l> ). In system (.), we assume that the regionis closed, with no prey and predator species entering and leaving the region at the boundary. We also assume that the reproduction of predator population after predating the prey will not be instantaneous. There is a time delayτ required for gestation of predator.
The rest of this paper is arranged as follows. We study the stability property of the non-delayed system in the next section and discuss the non-delayed system in Section . Then we give some numerical simulations. At last, we end this paper with a brief conclusion.
2 Stability analysis of the non-delayed system Without delay, system (.) becomes
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩
∂u
∂t =du+u( –u–
a(–m)v
+b(–m)u+cv), x∈(,lπ),t> , ∂v
∂t =dv+sv( (–m)u
+b(–m)u+cv–d), x∈(,lπ),t> , ux(,t) =vx(,t) = , ux(lπ,t) =vx(lπ,t) = , t> , u(x, ) =u(x,t)≥, v(x, ) =v(x,t)≥, x∈[,lπ].
(.)
Obviously, system (.) has a trivial equilibrium (, ) and a predator-free axial equilibrium (, ). IfE∗(u∗,v∗) is a coexisting equilibrium of system (.), then it is easy to obtain that v∗=u∗(–uad∗). Thenu∗∈(, ) and is a root of
h(u) =cu+a( –bd)( –m) –cu–ad= . (.)
Obviously,h() = –ad< andh() =a[( –bd)( –m) –d]. Ifd< ( –bd)( –m), then
h() > implies that system (.) has at least one coexisting equilibrium.
In this paper, we just suppose system (.) has a coexisting equilibrium pointE∗(u∗,v∗).
2.1 Local stability analysis of the model without diffusion Ifd=d= , the Jacobian matrix atE∗(u∗,v∗) is
J=
a a sa sa
,
where
a=bd( –u∗) –u∗, a=d
c( –u∗)/( –m) –a,
a= ( –bd)( –u∗)/a, a= –cd( –u∗)/a( –m).
Obviously,a< . The characteristic equation is
λ–trλ+= . (.)
The characteristic roots areλ,=[tr± √
]. If
then the characteristic roots have negative real parts. Make the following hypothesis:
aa–aa> . (H)
If (H) holds, thenE∗(u∗,v∗) is locally asymptotically stable if and only ifa+sa< .
Meanwhile, ifa> whens near –a/a, Eq. (.) has a pair of complex eigenvalues
α(s)±iω(s), where
α(s) =
(a+sa), ω(s) =
s(aa–aa)
and
α(–a/a) = , α(–a/a) =a/, ω(–a/a) > .
Theorem . When d=d= ,assume(H)holds.
(i) Ifa+sa< ,thenP(u∗,v∗)is locally asymptotically stable; (ii) Ifa> ,Hopf bifurcation occurs atP(u∗,v∗)whens= –a/a.
2.2 Turing instability and Hopf bifurcation
For system (.), the characteristic equation atE∗(u∗,v∗) is
λ–trnλ+n(r) = , n∈N, (.)
where ⎧ ⎨ ⎩
trn=tr–n
l(d+d),
n=–n
l(da+dsa) +ddn l,
(.)
and the eigenvalues are
λ(n),(r) =trn±
tr n– n
, n∈N. (.)
Notice thata+sa< implies thattrn< forn∈N. Suppose (H) holds, then the
eigenvalues of (.) have negative real parts ifn> guaranteed by
da+dsa≤, (.)
or
da+dsa> , and (da+dsa)– dd< . (.)
If
da+dsa> , and (da+dsa)– dd> (.)
hold, and there existsk∈Nsuch thatk< , then the eigenvalues of (.) have a positive
real partλ(k)(s), which implies thatE
Assume (H) holds anda> . When
s=sn:= –
a
a– n
l(d+d)
, n∈N (.)
andn(sn) > , Eq. (.) has purely imaginary values. Obviously,(s) = –aa(aa– aa) > . From (.), we know that there existsn∗≥∈Nsuch thatn(sn) > forn=
, , . . . ,n∗– . Let
λn(s) =αn(s)±iωn(s), n= , , . . . ,n∗–
be the roots of Eq. (.) satisfying
αn(sn) = , ωn(sn) =
n(sn).
Whensis nearsn,
αn(s) = trn(s)
, ωn(s) =
n–αn(s).
From (.), we know that
αn(sn) = a
< . (.)
Theorem . Assume(H)holds.
(i) Ifa+sa< and(.) (or(.))hold,thenE∗(u∗,v∗)is locally asymptotically
stable;
(ii) Ifa+sa< and(.)hold,andk> fork∈N,thenE∗(u∗,v∗)is locally
asymptotically stable;
(iii) Ifa+sa< and(.)hold,andk< fork∈N,thenE∗(u∗,v∗)is Turing
unstable;
(iv) Hopf bifurcation occurs atE∗(u∗,v∗)whens=sn,for≤n≤n∗– .
Similarly, we can obtain that for system (.), (, ) is unstable and (, ) is locally stable under conditiond> ( –bd)( –m).
2.3 Global stability of (1, 0) and (u∗,v∗)
Theorem . When d> ( –bd)( –m), (, )is globally asymptotically stable.
Proof From (.), we can obtain that
∂u
∂t –d
∂u
∂x =u
–u– a( –m)v +b( –m)u+cv
≤u( –u).
Use the comparison principle, then
lim
From (.), we can obtain
For the sake of completeness, we give the following theorem about the global stability ofE(u∗,v∗) by the proof process similar to that in [].
computation, it follows that
= –I(t) +
3 Stability analysis of the delayed system
3.1 Stability analysis and the existence of Hopf bifurcation
For simplification of notations, useu(t),v(t),u(t–τ),v(t–τ) foru(x,t),v(x,t),u(x,t–τ),
The characteristic equation is
Letiω(ω> ) be a solution of Eq. (.), then
–ω+iωAn+Bn+s(Cn–iωa)(cosωτ–isinωτ) = .
Then we obtain ⎧
⎨ ⎩
–ω+B
n+sCncosωτ–asωsinωτ= , Anω–Cnssinωτ–asωcosωτ= .
Then
ω+An– Bn–as
ω+Bn–Cns= . (.)
Denotez=ω, then (.) becomes
z+An– Bn–as
z+Bn–Cns= = , (.)
and the roots are
z±=
–An– Bn–as
±A
n– Bn–as
– B n–Cns
. (.)
Assume (H) and condition (i) or (ii) in Theorem . holds. Then
Bn+sCn=n> ,
An– Bn–as=
d n
l –a
+dn
l –a s,
and
Bn–sCn=dd n
l + n
l(ads–ad) –s(aa–aa).
Denote
S={n|Bn–sCn< ,n∈N}.
ThenSis a finite set sincelimn→∞Bn–sCn→+∞.
Lemma . Assume(H)and condition(i)or(ii)in Theorem.holds.Then Eq. (.)has a pair of purely imaginary roots±iωn(n∈S)atτnj=τn+
jπ
ωn,j∈N,where
τn= ωn
arccosCnω
–B
nCn+aAnω s(C
n+aω)
, and ωn=
√
z+ (given in(.)). (.)
Proof Differentiating two sides of (.) with respect toτ, we have
dλ
dτ –
=λ+An–sae
–λτ
s(Cn–λa)λe–λτ
–τ λ.
Then
Re
dλ
dτ –
τ=τnj =Re
λ+An–sae–λτ s(Cn–λa)λe–λτ
–τ λ
=
ω
ω+A
n– Bn–as
=
ω
A
n– Bn–as
– B n–Cns
> ,
where=Cnsω+asω> . ThereforeReλn(τnj) > .
Denoteτ∗=mini∈S{τi}. According to the above analysis, we have the following theorem.
Theorem . Assume(H)and condition(i)or(ii)in Theorem.holds. (i) E∗(u∗,v∗)is locally asymptotically stable forτ∈[,τ∗).
(ii) E∗(u∗,v∗)is unstable forτ >τ∗.
(iii) τ=τnj(n∈S,j∈N)are Hopf bifurcation values of system(.).
3.2 Stability and direction of Hopf bifurcation
We give detailed computation about Hopf bifurcation using the method in [, ]. For fixedj∈Nandn∈S, we denoteτ˜=τnj. Letu¯(x,t) =u(x,τt) –u∗andv¯(x,t) =v(x,τt) –v∗.
For convenience, we drop the bar. Then (.) can be written as ⎧
⎨ ⎩
∂u
∂t =τ[du+ (u+u∗)(( –u–u∗) –
a(–m)(v+v∗) +b(–m)(u+u∗)+c(v+v∗))], ∂v
∂t =τ[dv+s(v+v∗)(
(–m)(u(t–)+u∗)
+b(–m)(u(t–)+u∗)+c(v(t–)+v∗)–d)].
(.)
Let
τ=τ˜+μ, u(t) =u(·,t),
u(t) =v(·,t) and U= (u,u)T.
In the phase spaceC:=C([–, ],X), (.) can be rewritten as
dU(t)
dt =τ˜DU(t) +L˜τ(Ut) +F(Ut,μ), (.)
whereLμ(φ) andF(φ,μ) are given respectively by
Lμ(φ) =μ
aφ() +aφ() saφ(–) +saφ(–)
,
with
f(φ,μ) = (τ˜+μ)F(φ,μ),F(φ,μ)
T
,
F(φ,μ) =
φ() +u∗
–φ() –u∗
– a( –m)(φ() +v∗)
+b( –m)(φ() +u∗) +c(φ() +v∗)
–aφ() –aφ(),
F(φ,μ) =s
φ() +v∗
( –m)(φ(–) +u∗)
+b( –m)(φ(–) +u∗) +c(φ(–) +v∗)–d
–saφ(–) –saφ(–)
forφ= (φ,φ)T∈C.
Consider the linear equation
dU(t)
dt =τ˜DU(t) +Lτ˜(Ut). (.)
From the previous discussion, we know that±iωnare simply purely imaginary
character-istic values of the linear functional differential equation
dz(t)
dt = –τ˜D n
lz(t) +Lτ˜(zt). (.)
From the Riesz representation theorem, there exists a bounded variation function ηn(σ,τ˜)–≤σ≤ such that –τ˜Dnlφ()+Lτ˜(φ) =
–dη
n(σ,τ)φ(σ) forφ∈C([–, ],R).
In fact, we can choose
ηn(σ,τ) = ⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩
τE, σ= ,
, σ∈(–, ),
–τF, σ= –,
(.)
where
E=
a–dn l a
–dn
l
, F=
sa sa
. (.)
LetA(τ˜) denote the infinitesimal generators of a semigroup included by the solutions of Eq. (.) andA∗be the formal adjoint ofA(τ˜) under the bilinear pairing
(ψ,φ) =ψ()φ() –
–
σ
ξ=
ψ(ξ–σ)dηn(σ,τ˜)φ(ξ)dξ
=ψ()φ() +τ˜
–
ψ(ξ+ )Fφ(ξ)dξ (.)
forφ∈C([–, ],R),ψ∈C([–, ],R).±iωnτ˜is a pair of simple purely imaginary
eigen-values of A(τ˜) and A∗. Let P and P∗ be the center subspace, that is, the generalized eigenspace ofA(τ˜) andA∗associated with±iωn, respectively. ThenP∗is the adjoint space
Letp(θ) = (,ξ)Teiωnτ σ˜ (σ∈[–, ]),q(r) = (,η)e–iωnτ˜r(r∈[, ]) be the eigenfunctions
ofA(τ˜) andA∗corresponding toiωnτ˜, –iωnτ˜, respectively. By direct calculations, we chose
ξ=
a
iωn–a+d n l
, η=–e
–iτ ωn
sa
iωn+a–d n
l
.
Let= (,) and∗= (∗,∗)Twith
(σ) =
p(σ) +p(σ)
=
Re(eiωnτ σ˜ )
Re(ξeiωnτ σ˜ ) ,
(σ) =
p(σ) –p(σ)
i =
Im(eiωnτ σ˜ )
Im(ξeiωnτ σ˜ )
forθ∈[–, ], and
∗(r) = q(r) +q(r)
=
Re(e–iωnτ˜r)
Re(ηe–iωnτ˜r) ,
∗(r) = q(r) –q(r)
i =
Im(e–iωnτ˜r)
Im(ηe–iωnτ˜r)
forr∈[, ]. Then we can compute by (.)
D∗:=∗,
, D∗:=∗,
, D∗:=∗,
, D∗:=∗,
.
Define (∗,) = (j∗,k) =
D∗ D∗ D∗D∗
and construct a new basisforP∗by
= (,)T=
∗,–∗.
Then (,) =I. In addition, definefn:= (βn,βn), where
βn=
cosnlx
, β
n=
cosnlx .
We also define
c·fn=cβn+cβn, forc= (c,c)T∈C.
Thus the center subspace of linear equation (.) is given byPCNC⊕PSC, andPSC
denotes the complement subspace ofPCNCinC,
u,v:=
lπ lπ
uvdx+
lπ lπ
uvdx
LetAτ˜denote the infinitesimal generator of an analytic semigroup induced by the linear
system (.), and Eq. (.) can be rewritten as the following abstract form:
dU(t)
dt =Aτ˜Ut+R(Ut,μ), (.)
where
R(Ut,μ) =
⎧ ⎨ ⎩
, θ∈[–, );
F(Ut,μ), θ= .
(.)
By the decomposition ofC, the solution above can be written as
Ut=
x x
fn+h(x,x,μ), (.)
where
x x
=,Ut,fn
,
and
h(x,x,μ)∈PSC, h(, , ) = , Dh(, , ) = .
In particular, the solution of (.) on the center manifold is given by
Ut=
x(t) x(t)
fn+h(x,x, ). (.)
Letz=x–ix, and notice thatp=+i. Then we have
x x
fn= (,)
z+z i(z–z)
fn=
(pz+pz)fn
and
h(x,x, ) =h
z+z
,
i(z–z)
,
.
Hence, Eq. (.) can be transformed into
Ut=
(pz+pz)fn+h
z+z
,
i(z–z)
,
=
(pz+pz)fn+W(z,z), (.)
where
W(z,z) =h
z+z
,
i(z–z)
,
κ=e–iτ ωnW()(–)(guu+ξguv) +e–iτ ωnW()(–)(guv+ξgvv)
+ e
iτ ωnW()
(–)(guu+ξguv) +
e
iτ ωnW()
(–)(guv+ξgvv),
κ=
e
–iτ ωng
uuu+ (ξ+ ξ)guuv+ξ
(ξ+ξ)guvv+ ξ ξgvvv
.
Denote
() –i() := (γ γ).
Notice that
lπ lπ
cosnx
l dx= , n= , , , . . . ,
and we have
() –i()
F(Ut, ),fn
=z
(γχ+γς)τ˜+zz(γχ+γς)τ˜+
z
(γχ+γς)τ˜
+z
z
τ˜[γκ+γκ] +· · ·. (.)
By (.), (.) and (.), we obtain thatg=g=g= , forn= , , , . . . . Ifn= , we
have
g=γτ χ˜ +γτ ς˜ , g=γτ χ˜ +γτ ς˜ , g=γτ χ˜ +γτ ς˜ .
And forn∈N,g=τ˜(γκ+γκ).
From [], we have
˙
W(z,z) =Wz˙z+Wzz˙ +Wzz˙+Wzz˙+· · ·,
Aτ˜W(z,z) =Aτ˜W z
+Aτ˜Wzz+Aτ˜W
z
+· · ·,
andW(z,z) satisfies
˙
W(z,z) =Aτ˜W+H(z,z),
where
H(z,z) =H z
+Wzz+H
z
+· · · =XF(Ut, ) –
,XF(Ut, ),fn
·fn
. (.)
Hence, we have
That is,
Similarly, from (.), we have
That is,
W(θ) = i
iωnτ˜
p(θ)g–p(θ)g
+E.
Similarly, we have
E=τ˜E∗
χ
ς
cos
nx l
,
where
E∗=
dn
l –a –a
–sa dn l –sa
–
.
Thus, we can obtain the following quantities which determine the property of Hopf bifur-cation:
c() = i
ωnτ˜
gg– |g|–| g|
+
g, μ= –
Re(c())
Re(λ(τnj))
,
T= –
ωnτ˜
Imc()
+μIm
λτnj, β= Re
c()
.
(.)
Theorem . For any critical valueτnj,we have the following results.
(i) Whenμ> (resp.<),the Hopf bifurcation is forward(resp.backward).
(ii) Whenβ< (resp.>),the bifurcating periodic solutions on the center manifold are
orbitally asymptotically stable(resp.unstable).
(iii) WhenT> (resp.T< ),the period increases(resp.decreases).
4 Numerical simulations
4.1 The case of
τ
= 0Consider the following system:
⎧ ⎨ ⎩
∂u
∂t = .u+u( –u–
.(–m)v +(–m)u+.v), ∂v
∂t = v+ v(
(–m)u
+(–m)u+.v– .),
(.)
where= .π. To study the effect of prey refuge, vary the parametermin system (.). The stabilities ofE∗(u∗,v∗) for system (.) are shown in Table . It suggests that prey refuge
has a stabilizing effect on system (.) without and with diffusion. But whenm= ., ., there are differences in these two kinds of systems.
Table 1 Stability ofE∗(u∗,v∗) for system (4.1)
m Without diffusion With diffusion
0, 0.05, 0.1 Unstable Unstable
0.15, 0.2 Stable Unstable
Figure 1 Phase portraits of system (4.1) whend1=d2= 0.Left:s= 10, and the initial condition (0.5, 8.2).
Right:s= 15 and the initial condition (0.5, 8.2).
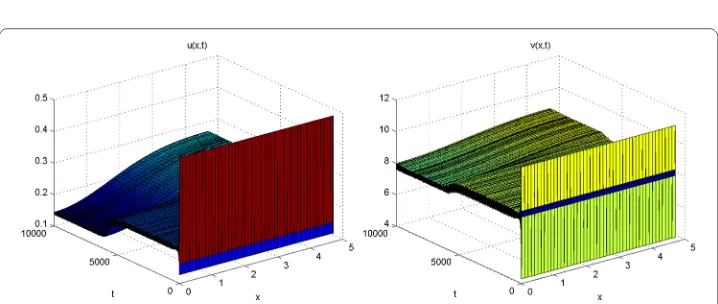
Figure 2 For system (4.1),s= 15 and the initial condition is (0.5, 8.2).Left component:u(x,t) (Turing unstable). Right component:v(x,t) (Turing unstable).
Now, fixm= ., vary the parametersin system (.).E∗(., .) is the unique positive equilibrium, and
a≈. > , aa–aa≈. > ,
then (H) holds. Ifd=d= anda+sa< , thenE∗(u∗,v∗) is locally asymptotically
stable, and the system undergoes Hopf bifurcation atE∗(u∗,v∗) whens= –a/a(shown
in Figure ). For system (.), if we chooses= , then by Theorem .(iii),E∗(u∗,v∗) is
Turing unstable, this is shown in Figure . For system (.), by Theorem .(v), Hopf bi-furcation occurs whens= –a/a, this is shown in Figure .
4.2 The case of
τ
= 0Consider the following system: ⎧
⎨ ⎩
∂u
∂t = .u+u( –u–
.(–.)v +(–.)u+.v), ∂v
∂t = .v+ .v(
(–.)u(t–τ)
+(–.)u(t–τ)+.v(t–τ)– .),
(.)
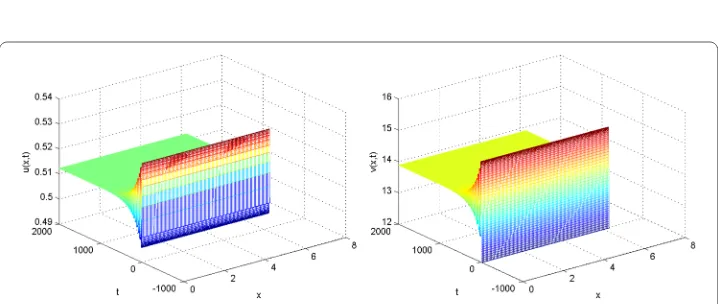
Figure 3 For system (4.1),s= 10 and the initial condition is (0.5, 8.2).Left component:u(x,t) (Stable). Right component:v(x,t) (Stable).
Figure 4 For system (4.2),τ= 0 and the initial condition is (0.5, 12).Left component:u(x,t) (Stable). Right component:v(x,t) (Stable).
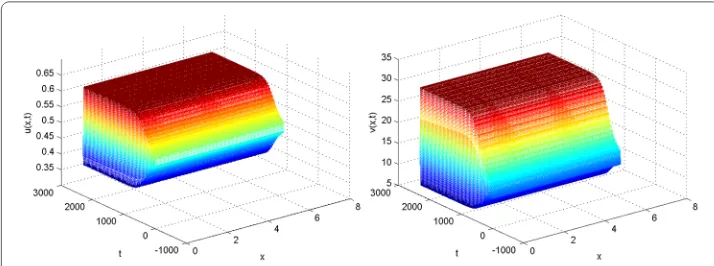
Figure 5 For system (1.3),τ= 8 and the initial condition is (0.5, 12).Left component:u(x,t) (Stable). Right component:v(x,t) (Stable).
By computation, we obtain τ∗ ≈.. By Theorem ., we know that ifτ ∈[,τ∗), thenE∗(u∗,v∗) is locally asymptotically stable, this is shown in Figure . By Theorem ., Hopf bifurcation occurs at theE∗(u∗,v∗) when τ =τ∗. By Theorem ., we haveμ≈
Figure 6 For system (1.3),τ= 9.2 and the initial condition is (0.5, 12).Left component:u(x,t) (Periodic solution). Right component:v(x,t) (Periodic solution).
5 Conclusion
In this paper, a diffusive predator-prey system with prey refuge and gestation delay is in-vestigated. For a non-delay system, the conditions inducing Turing instability and Hopf bifurcation are given. The global stabilities of equilibria (, ) and (u∗,v∗) are also
consid-ered. By numerical simulation, we conclude that prey refuge has a stabilizing effect on the reaction-diffusion system similar to the ODE system. But, when prey refuge is equal to some values, Turing instability may occur. For a delayed system, time induced instability and Hopf bifurcation are investigated. We conclude that time delayτ may affect the sta-bility of the positive equilibrium. When it is smaller than the critical valueτ∗, then prey and predator will coexist and tend to the interior equilibriumE∗(u∗,v∗). When the delay passes through some critical values, the positive equilibrium loses its stability and Hopf bifurcations occur. Then prey and predator will exhibit oscillatory behavior.
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The idea of this research was introduced by RY. All authors contributed to the main results and numerical simulations.
Acknowledgements
The authors wish to express their gratitude to the editors and reviewers for the helpful comments. This research is supported by the National Nature Science Foundation of China (No. 11601070) and Fundamental Research Funds for the Central Universities (No. 2572017BB16).
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Received: 20 February 2017 Accepted: 3 May 2017
References
1. Wang, J, Shi, J, Wei, J: Dynamics and pattern formation in a diffusive predator-prey system with strong Allee effect in prey. J. Differ. Equ.251, 1276-1304 (2011)
2. Lv, Y, Pei, Y, Yuan, R: Hopf bifurcation and global stability of a diffusive Gause-type predator-prey models. Comput. Math. Appl.72(10), 2620-2635 (2016)
3. Jia, J, Wei, X: On the stability and Hopf bifurcation of a predator-prey model. Adv. Differ. Equ.2016(1), 86 (2016) 4. Yuan, R, Jiang, W, Wang, Y: Saddle-node-Hopf bifurcation in a modified Leslie-Gower predator-prey model with
time-delay and prey harvesting. J. Math. Anal. Appl.422(2), 1072-1090 (2015)
5. Dai, Y, Jia, Y, Zhao, H, et al.: Global Hopf bifurcation for three-species ratio-dependent predator-prey system with two delays. Adv. Differ. Equ.2016(1), 1 (2016)
6. Niu, B, Hopf, JW: Bifurcation induced by neutral delay in a predator-prey system. Int. J. Bifurc. Chaos23(11), 1350174 (2013)
8. Bairagi, N, Roy, PK, Chattopadhyay, J: Role of infection on the stability of a predator-prey system with several response functions-a comparative study. J. Theor. Biol.248(1), 10-25 (2007)
9. Holling, CS: Chattopadhyay, J: The functional response of predators to prey density and its role in mimicry and population dynamics. Mem. Entomol. Soc. Can.97(45), 1-60 (1965)
10. Beddington, JR: Mutual interference between parasites or predators and its effect on searching efficiency. J. Anim. Ecol.44(1), 331-340 (1975)
11. Crowley, PH, Martin, EK: Functional responses and interference within and between year classes of a dragonfly population. J. North Am. Benthol. Soc.8(3), 211-221 (1989)
12. Hassell, MP, Varley, GC: New inductive population model for insect parasites and its bearing on biological control. Nature223(5211), 1133-1137 (1969)
13. Arditi, R, Akcakaya, HR: Variation in plankton densities among lakes: a case for ratio-dependent predation models. Am. Nat.138(5), 1287-1296 (1991)
14. Zhang, Y, Chen, S, Gao, S: Analysis of a nonautonomous stochastic predator-prey model with Crowley-Martin functional response. Adv. Differ. Equ.2016(1), 264 (2016)
15. Tripathi, JP, Abbas, S, Thakur, M: A density dependent delayed predator-prey model with Beddington-DeAngelis type function response incorporating a prey refuge. Commun. Nonlinear Sci. Numer. Simul.22(1-3), 427-450 (2014) 16. Hsu, SB, Hwang, TW, Kuang, Y: Global dynamics of a predator-prey model with Hassell-Varley type functional
response. Discrete Contin. Dyn. Syst., Ser. B4(4), 857-871 (2008)
17. Cantrell, RS, Cosner, C: On the dynamics of predator-prey models with the Beddington-DeAngelis functional response. J. Math. Anal. Appl.257(1), 206-222 (2001)
18. Tripathi, JP, Tyagi, S, Abbas, S: Global analysis of a delayed density dependent predator-prey model with Crowley-Martin functional response. Commun. Nonlinear Sci. Numer. Simul.30(1-3), 45-69 (2016)
19. Skalski, GT, Gilliam, JF: Functional responses with predator interference: viable alternatives to the Holling type II model. Ecology82(11), 3083-3092 (2001)
20. Sharma, S, Samanta, GP: A Leslie-Gower predator-prey model with disease in prey incorporating a prey refuge. Chaos Solitons Fractals70(1), 69-84 (2015)
21. Tripathi, JP, Abbas, S, Thakur, M: A density dependent delayed predator-prey model with Beddington-DeAngelis type function response incorporating a prey refuge. Commun. Nonlinear Sci. Numer. Simul.22(1-3), 427-450 (2015) 22. Chen, F, Chen, L, Xie, X: On a Leslie-Gower predator-prey model incorporating a prey refuge. Nonlinear Anal., Real
World Appl.10(5), 2905-2908 (2009)
23. Collings, JB: Bifurcation and stability analysis of a temperature-dependent mite predator-prey interaction model incorporating a prey refuge. Bull. Math. Biol.57(1), 63-76 (1995)
24. Ma, Z, Li, W, Zhao, Y, et al.: Effects of prey refuges on a predator-prey model with a class of functional responses: the role of refuges. Math. Biosci.218(2), 73-79 (2009)
25. Mukherjee, D: The effect of refuge and immigration in a predator-prey system in the presence of a competitor for the prey. Nonlinear Anal., Real World Appl.31, 277-287 (2016)
26. Tripathi, JP, Abbas, S, Thakur, M: Dynamical analysis of a prey-predator model with Beddington-DeAngelis type function response incorporating a prey refuge. Nonlinear Dyn.80, 177-196 (2015)
27. Lahrouz, A, Settati, A, Mandal, PS: Dynamics of a switching diffusion modified Leslie-Gower predator-prey system with Beddington-DeAngelis functional response. Nonlinear Dyn.85(2), 853-870 (2016)
28. Tang, X, Song, Y, Zhang, T: Turing-Hopf bifurcation analysis of a predator-prey model with herd behavior and cross-diffusion. Nonlinear Dyn.86(1), 73-89 (2016)
29. Jia, Y, Xue, P: Effects of the self- and cross-diffusion on positive steady states for a generalized predator-prey system. Nonlinear Anal., Real World Appl.32, 229-241 (2016)
30. Tang, X, Song, Y: Stability, Hopf bifurcations and spatial patterns in a delayed diffusive predator-prey model with herd behavior. Appl. Math. Comput.254, 375-391 (2015)
31. Shi, H, Ruan, S: Spatial, temporal and spatiotemporal patterns of diffusive predator-prey models with mutual interference. IMA J. Appl. Math.80(5), 1534-1568 (2015)
32. Wu, J: Theory and Applications of Partial Functional Differential Equations. Springer, Berlin (1996)