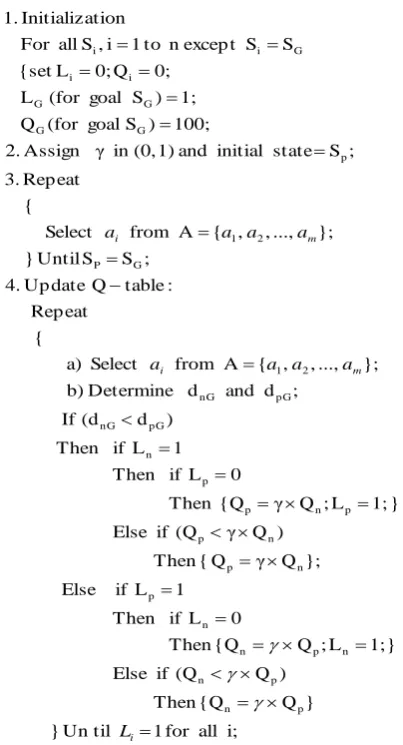
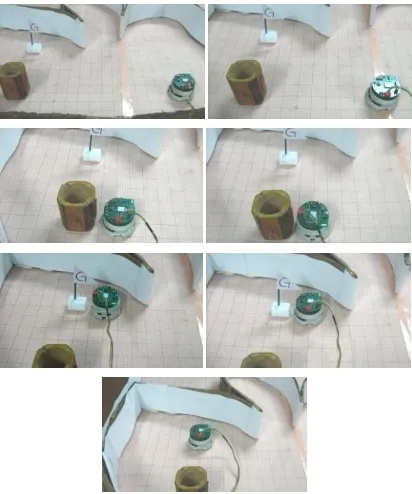
An Improved Q learning Algorithm for Path Planning of a Mobile Robot
Full text
Figure

Related documents
Although the wage rate is higher and the proportional tax rate τ y on income and the social security tax rate τ ss on labor income are lower than in the benchmark due to the
Recovery is a very personal process and a recovery ethos may be seen as a metaphor for the values, beliefs and culture conducive to supporting people in this process. The change in
• Best practices and lean manufacturing and their application to Navy shipbuilding and the defense aircraft industry could gen- erate savings.. • The 2005 Base Realignment and
In this work we have considered the NSPP for those networks which are multigraphs, and we have proposed a method to extract the neutrosophic shortest path in a directed
Rosemead High School; Uyen ‘Bonny’ Tang, San Gabriel Academy High School; Julissa Del Rio, San Gabriel High School; Nadine Mora, San Gabriel Mission High School; Leona Chen,
Performance of bridges at the demand, damage, and loss levels can be evaluated using the Pa- cific Earthquake Engineering Research (PEER) Center’s probabilistic
The main contribution of this study is to decrease income inequality in risk sharing network such as informal insurance through an analytical method, this study
Reflecting the slowdown in advertising investment and particular difficulties in the financial markets during the year, the 2001 results are less than those for 2000 (net profit
