2018 3rd International Conference on Information Technology and Industrial Automation (ICITIA 2018)
ISBN: 978-1-60595-607-7
An Intent Recognize Based on Petri Nets
Huayun Liu and Lin Zhang
ABSTRACT
Intent recognition is an important problem to address in order to enhance the capabilities of battlefield surveillance systems. It is concerned with finding a priori defined template that possibly are instantiated in the present flow of battle events. Intent recognition requires that many sub problems are solved. For instance, we need to establish which actions are interesting, how to represent these actions, and inferable events and states that can be used for representing them. In this paper we discuss current research efforts and goals concerning template-based intent recognition. We provide a categorization of approaches for intent recognition together with a formalization of the template-based intent recognition problem. We discuss this formalization in the light of an air-ground striking scenario. Finally, we conclude that intent recognition is an important problem to look into for enhancing the overall situation awareness of decision makers. 1
KEYWORDS
Intent Recognition, Petri Net, Template-Based, Situation Awareness
INTRODUCTION
Intent recognition is an important problem with many domains, and it is concerned with identifying information. The intent recognition problem is closely related to the information fusion domain, which aims at aiding decision makers in achieving enhanced situation awareness. Information fusion is generally described in
terms of the Joint Directors of Laboratories (JDL) model of information fusion [1] [2]. In reference to the JDL model, intent recognition is mostly related to the situation assessment level, where the goal is to infer relational information between numerous detected objects and the environment, in the universe of interest. Lambert [3] argues that one of the main differences when moving from object to situation assessment is that we move from the numerical domain of measurable properties, into the symbolic domain where we operate on sets of facts. In environments such as the military ground arena, decision makers need rich support systems that are able to help them not only with estimating objects and properties, but also with analyzing situations. And hence, surveillance systems need to be enhanced with these capabilities as well.
The rest of this paper is organized as follows. Section two covers background information including previously presented Petri net based approach situation recognition. In section three we talk about Petri net template-based intent recognition, provide definitions of terms; provide a formation of the problem, and discuss the algorithm of the problem. In order to clarify our work, Section four discusses an example scenario that we are interested in intent recognizing. Section six concludes the paper and points out our directions for future work.
PETRI NETS FOR RECOGNITION
A Petri net is according to Murata [4] a directed, weighted, bipartite graph in which nodes come in two flavors: places and transitions. Edges in the graph either connect places to transitions (called input arcs), or transitions to places (called output arcs). The final component of Petri nets, tokens, are used to denote the existence of a process (or similar) at specific places in the net. Petri nets are according to Sowa [5] a generalization of finite state automata (FSA) and can be viewed as a combination of FSA and event charts, where places correspond to states of FSA, and where transitions corresponds to events in a flow charts. Further, Sowa [5] argues that the main strength of Petri nets is their ability of representing parallel and concurrent processes.
REPRESENTATION
In the following, each of the components of the extended Petri net based technique for recognition is presented in more detail, starting with tokens.
Tokens in the approach are used to represent partial matches between a template and the stream of events that we have been observed. This follows the ideas of colored Petri nets, in which tokens are used as carriers of information. Recall, a template T =(X, C) consists of a set of variables X and a set of constraints C. Likewise, a token represents parts of a template TO0=(X,C’), where C’ is a subset of C which consist of all non-temporal constraints. The temporal constraints do not need to be modeled in a token since the structure of a Petri net contains the temporal constraints in a template.
Two different kinds of transitions are used in the approach. The first is the basic Petri net transition, which is activated when a new set of combinable tokens exist in its input places. The second type of transition is a conditional transition, introduced by Ghanem et al.[7], to which constraints can be assigned. For example, the constraint Meeting( x, y) = true can be assigned to a conditional transition, which in turn would be activated when an event of that type and value is processed in the system and if a combinable set of tokens exist in its input places. Every conditional transition maps to exactly one constraint in a template for an interesting situation.
Places represent partial stages of the matching procedure with a specific situation type, and a token at a specific place means that there is a partial match that has reached that far in the matching procedure.
ALGORITHM
TABLE I. UPDATING THE MARKETING OF A PETRI NET PN UPON RECEIVING A NEW EVENT.
1 Function UpdatePetriNet(PN,e) 2 for all places p in PN do
for all partial matches pm in p do
if time e( )timestart pm( )sliding window_ then Remove(p,pm)
end if end for end for 3
4 5 6 7 8
9 output
10 for all transitions t in PN do if t is a conditional transition then if condition of t is fulfilled by e then
( )
list
pm CreatePartialMatches e
[ ] ( , list, )
output t DeriveOutput t pm nil end if
end if end for 11
12 13 14 15 16 17
18 for all transitions t in PN do
for all partial matches pm in output[t] do for all output places poutput do Insert(poutput,pm)
end for end for end for 19
20
21 22 23 24
25 end function
ILLUSTRATIVE EXAMPLE
This section illustrates the use of the intent recognition with a small example. The intent of attack is to assault ground radar station, the force are strikers, fighters, and electronic jamming aircraft.
m0
T1:Striker_Takeoff(x1)
T2:Escort_Takeoff(x2)
T3:Jammer_Takeoff(x3)
T4:Meeting(x1,x2) T6:Shoot(x1) T7:RTB(x1,x2,x3)
T5:Jamming(x3) p1
p2
p3
p4
p5 p7
p6
p8
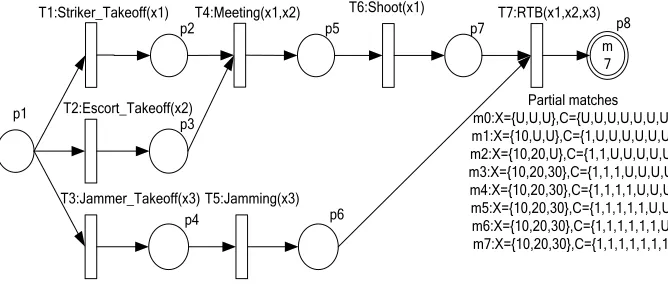
Partial matches m0:X={U,U,U},C={U,U,U,U,U,U,U}
Figure 1. Initial marking of the Petri net.
When the striker is takeoff, the first event to be processed is Striker Takeoff (10) = true. This event matches the relational constraint in the first transitions, which calls for further evaluation. The second transition does however not match the event, as it depicts a Striker _Takeoff constraint. In the first transition, a new token m1 is created, in which x1←10 and c1←1. The next step is to combine the newly created tokens with all tokens in the input place. The input place, p1, however only consists of a single token in which nothing has been bound. Therefore, both tokens are put in the output list of t1. Consequently, the two tokens are removed from further processing. Finally, the one token in the output list of t1 are inserted into p2. This completes the processing needed for updating the Petri net to account for the new information provided by the first event. Similarly, after the second and the third event to be processed, two new tokens m2, m3 are inserted into p3 and p4 .The marking after the first event is illustrated in Fig.2.
Partial matches m0:X={U,U,U},C={U,U,U,U,U,U,U} m1:X={10,U,U},C={1,U,U,U,U,U,U} m2:X={10,20,U},C={1,1,U,U,U,U,U} m3:X={10,20,30},C={1,1,1,U,U,U,U} m1
m2
m3 T1:Striker_Takeoff(x1)
T2:Escort_Takeoff(x2)
T3:Jammer_Takeoff(x3)
T4:Meeting(x1,x2) T6:Shoot(x1) T7:RTB(x1,x2,x3)
T5:Jamming(x3) p1
p2
p3
p4
p5 p7
p6
[image:5.612.140.497.467.602.2]p8
Partial matches m0:X={U,U,U},C={U,U,U,U,U,U,U} m1:X={10,U,U},C={1,U,U,U,U,U,U} m2:X={10,20,U},C={1,1,U,U,U,U,U} m3:X={10,20,30},C={1,1,1,U,U,U,U} m4:X={10,20,30},C={1,1,1,1,U,U,U} m4
m3 T1:Striker_Takeoff(x1)
T2:Escort_Takeoff(x2)
T3:Jammer_Takeoff(x3)
T4:Meeting(x1,x2) T6:Shoot(x1) T7:RTB(x1,x2,x3)
T5:Jamming(x3) p1
p2
p3
p4
p5 p7
p6
[image:6.612.140.492.101.253.2]p8
Figure 3. Marking of the Petri net after having processed Meeting events.
When the striker and the fighter are meeting, the forth event to be processed is Meeting (10, 20) = true. The event matches the constraint of t4 and there are tokes in p2, p3. A new token is therefore created in t4, in which x1←10, x2←20, and c4←1. The newly created token is then combined with the empty token in p1, after which the result is put on the output list of the second transition. This concludes the output derivation required for the second event, and the single newly created token is therefore inserted to p5. The marking of the Petri net after processing the second event, is shown in Fig.3.
When the jammer is starting jamming, the fifth event to be processed by the Petri net is Jamming (30) = true. After processed, the marking of the Petri net is updated by inserting new tokens into their place p6. The marking of the Petri net after the third event has been processed, is illustrated in Fig.4.
Partial matches m0:X={U,U,U},C={U,U,U,U,U,U,U} m1:X={10,U,U},C={1,U,U,U,U,U,U} m2:X={10,20,U},C={1,1,U,U,U,U,U} m3:X={10,20,30},C={1,1,1,U,U,U,U} m4:X={10,20,30},C={1,1,1,1,U,U,U} m5:X={10,20,30},C={1,1,1,1,1,U,U} m4 m5 T1:Striker_Takeoff(x1) T2:Escort_Takeoff(x2) T3:Jammer_Takeoff(x3)
T4:Meeting(x1,x2) T6:Shoot(x1) T7:RTB(x1,x2,x3)
[image:7.612.141.474.99.225.2]T5:Jamming(x3) p1 p2 p3 p4 p5 p7 p6 p8
Figure 4. Marking of the Petri after having processed jamming events.
Partial matches m0:X={U,U,U},C={U,U,U,U,U,U,U} m1:X={10,U,U},C={1,U,U,U,U,U,U} m2:X={10,20,U},C={1,1,U,U,U,U,U} m3:X={10,20,30},C={1,1,1,U,U,U,U} m4:X={10,20,30},C={1,1,1,1,U,U,U} m5:X={10,20,30},C={1,1,1,1,1,U,U} m6:X={10,20,30},C={1,1,1,1,1,1,U} m6 m5 T1:Striker_Takeoff(x1) T2:Escort_Takeoff(x2) T3:Jammer_Takeoff(x3)
T4:Meeting(x1,x2) T6:Shoot(x1) T7:RTB(x1,x2,x3)
[image:7.612.141.480.291.405.2]T5:Jamming(x3) p1 p2 p3 p4 p5 p7 p6 p8
Figure 5. Marking of the Petri after having processed shooting events.
Partial matches m0:X={U,U,U},C={U,U,U,U,U,U,U} m1:X={10,U,U},C={1,U,U,U,U,U,U} m2:X={10,20,U},C={1,1,U,U,U,U,U} m3:X={10,20,30},C={1,1,1,U,U,U,U} m4:X={10,20,30},C={1,1,1,1,U,U,U} m5:X={10,20,30},C={1,1,1,1,1,U,U} m6:X={10,20,30},C={1,1,1,1,1,1,U} m7:X={10,20,30},C={1,1,1,1,1,1,1} m 7 T1:Striker_Takeoff(x1) T2:Escort_Takeoff(x2) T3:Jammer_Takeoff(x3)
T4:Meeting(x1,x2) T6:Shoot(x1) T7:RTB(x1,x2,x3)
T5:Jamming(x3) p1 p2 p3 p4 p5 p7 p6 p8
[image:7.612.138.472.464.606.2]As can be observed, there is now a token in the match place, which indicates that we have recognized the target pattern. The marking of the Petri net after having processed the seven events is illustrated in Fig.6.
CONCLUSIONS
Intent recognition is problem of importance to look for enhancing the situation awareness of decision makers [8]. In this paper we have introduced a formalization of the template-based intent recognition problem. We believe that such formalization is needed in order to clearly understand what it is we are trying to achieve. Such formalization can also serve as a basis for discussing the intent recognition problem.
REFERENCES
1. A. Steinberg, C. Bowman, and F. White, “Revision to the JDL Data Fusion Model”, in Sensor Fusion: Architectures, Algorithms, and Applications, Proceedings of the SPIE, Vol. 3719, Orlando, FL, USA, 1999.
2. J. Linas, C. Bowman, G. Rogova, A. Steinberg, E. Waltz, and F. White, “Revisiting the JDL Data Fusion Model 2, in Processing’s of the 7th International Conference on Information Fusion, Stockholm, Sweden, 2004.
3. D. Lambert, “An Exegesis of Data Fusion”, in Reznik, L and Kreinovich, V. (Eds.), Soft Computing in Computing and Information Acquisition, Springer Heidelberg, 2003.
4. T. Murata, “Petri Nets: Properties, Analysis and Applications”, in Proceedings of the IEEE. 77(4), pp. 541-580, 1989.
5. J. Sowa, “Knowledge Representation: Logical Philosophical, and Computational Foundations”, Brooks/Cole Thomson Learning, Pacific Grove, 2000.
6. C. Castel, L. Chaudron, and C. Tessier, “What is going on? A High Level Interpretation of Sequences of Images”, in Proceedings of the 4th European Conference on Computer Vision, Workshop on Conceptual Descriptions fromImages, Cambridge, UK, 1996.
7. N. Ghanem, D. DeMenthon, D. Doermann, and L. Davis, “Representation and Recognition of Events in Surveillance Video Using Petri Nets”, in Proceedings of the Conference on Computer Vision and Pattern Recognition Workshop (CVPRW’ 04), pp. 112-120, 2004.