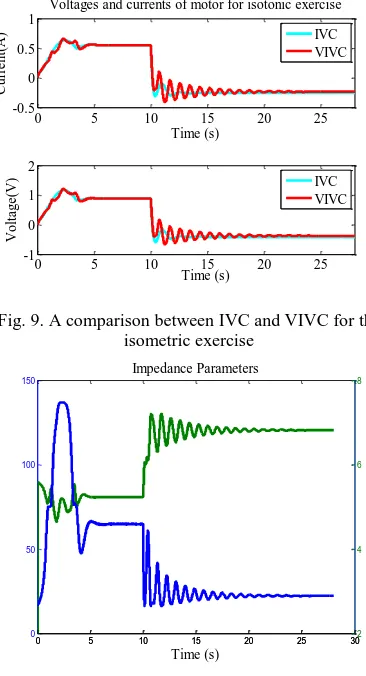
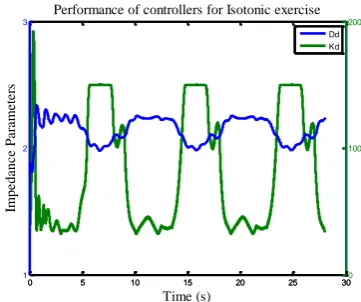
Variable Impedance Control for Rehabilitation Robot using Interval Type-2 Fuzzy Logic
Full text
Figure
Related documents
The generic algorithm (for either model) takes a set of policy parameters θ and a sample size M as input, and returns an estimate of the posterior moments of the gradient of
Persistence of implementation gap impeding equity The results are relatively disturbing, as they show that very little has changed since the early 2000s. Health workers have
The first step in testing the central hypothesis that cases involving white female victims are more likely to result in a death sentence was to conduct a logistic regression
Furthermore, as Haupt & Ismer (2011, p.7) pointed out, this approach has the inconvenience of the heterogeneous treatment of allowances because those which
Untario N, Dewi TC, Widodo MA, Rahaju P (2017) Effect of Tetrodotoxin from Crude Puffer Fish (Tetraodon fluviatilis) Liver Extract on Intracellular Calcium Level and Apoptosis
White teachers, I challenge you to consider how you are implicated in a country and an industry—education—that continues to serve some populations vastly better than others, and
Gen- ome wide association studies have shown independent single-nucleotide polymorphisms (SNPs) correlate with an increased risk of DLBCL [7, 8]. We report a woman with no
Spectrum investors receive asset allocation, discretionary investment management and trade execution services with respect to the assets invested in the accounts (“the
