AIAA
JounNalVol. 53, No. 4, April 2015
Flowfield-Dependent
Variation
Method
for
Moving-Boundary
Problems
Mohd
Fadhli-University
Tun Hussein OnnMalaysia,
86400 Batu Pahat,Malaysia
Ashraf
A.
Omar+University
of
Tripoli,
Sidy Almasry,Al
Furnaj
Road,Tripoli, Libya
andWaqar
Asrat'
International Islamic
UniversityMalaysia,
50728Kuala
Lumpur,Malaysia
DOI: I 0.25 1411.J053353A
novel numerical scherne using the combinationof
flowfield-dependent variation method and arbitraryLagrangian-Eulerian method is developed. This method is a mixed explicit-implicit nurnerical scherne, and its implicitness is dependent on the physical properties of the flowfield. The scheme is discretized using the finite-volume method to give flexibility in dealing with complicated geometries. The formulation itself yields a sparse matrix, which can be solved by using any iterative algorithrn. Several benchmark problems in two-dimensional inviscid and viscous flow have been selected to validate the method. Good agreement with available experimental and numerical data in
the literature has been obtained, thus showing its promising application in complex fluid-structure interaction problems.
4
b C;;
F
G
I,J
M
n Re
t U
um
f
O
?
d J
F.
6q 9
x
;
N
N
! r
!
'
Sa, Sb
s1, s2
sr, J4
Nomenclature
Jacobian of convection fluxJacobian of diffusion flux
Jacobian of gradient diffusion flux
vector of convection flux
vector of diffusion flux
vertex index Mach number normal vector
Reynolds number
implicitness parameters
convection fl owfi eld-dependent variation parameters diffusion fl owfi eld-dependent variation parameters time
vector of conservative variables mesh velocity
spatial coordinate
control surface
control volume
I.
Introduction
[i
HE study of fluid phenomena is highly dependent on numericalI
simulations because computational approaches are usually more economical. In fluid mechanics, such an approach is compu-tational fluid dynamics, and its development began with the adventof
the computerin
the 1950s. Continuous developmentof
computa-tional power has enabled researchers
to
studyfluid flow
aroundcomplete structures such as helicopters, airplanes, and spacecraft. However, algorithm efficiency of numerical solvers has become an issue as the size and the complexities
of
the problems increased. Moreover, muttidisciplinary problems such as moving-boundary or fluid-structure interaction problems become more relevant as the accuracy of the solution to the real-world application has becomes more demanding than ever before.Recently, the so-called flowfield-dependent variation (FDV) meth-od has been developed [ 1] as an approach to solve complex fluid-flow
problems with a single numerical solver. Based on earlier works
of
Yoon and Chung [2] and Yoon et al. [3], the FDV method was devised by Chung I I ] to deal with a domain that contains all speed flows and various physical properties. The FDV method was formulated using the expansion of conservative variables in a special form of Taylorseries that included parameters that govern the implicitness of the
formulation. Furthermore, these parameters vary locally and made dependent on the physical properties of the flow instead ofpredeter-mined
like
other existing schemes and hence are named as FDVparameters. In particular, these parameters are evaluated based on the local gradients of certain physical parameters such as Mach and Reynolds numbers in a computational domain. As a result, the FDV
method becomes a mixed
explicirimplicit
numerical scheme thatwill
adjust accordingly for every computational point based on theflow properties in that domain
Il-41.
Chung
[1]
applied finite-element methodto
approximate FDV formulation, but later Schunk et al. [5] addressed the FDV method asa strategy toward unification
of
finite-element, finite-volume, and finite-difference methods. Spatial discretization is simply the optionto discretize between adjacent grid points or within an element but does not dictate the physics because all the physical phenomena are taken into account in FDVequations. Recently, Elfaghi et al. [6,7] has successfully combined the finite-difference form
of
FDV methodwith higher-order compact method, which makes the method more
efficient in obtaining high-accuracy solutions. Moreover, the FDV
method has been expanded to high-energy astrophysics application
by
Richardsonet
al.
[8].
They found that theFDV
method is Subscriptsi,
j,
k =
spatial dimension index Superscriptn
=
time levelPresented asPaper2O14-2689 at the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, 16-20 June 2014; received 19 January 2014; revision received 14 June 2014; accepted for publication 28 August 2014; published online
I
December 2014. Copyright @ 2014 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved. Copies of this paper may be made for personal or internal use, on condition that the copier pay the $10.00 per-copy fee to the Copyright Clearance Centet Inc., 222 Rosewood Drive, Danvers, MA 01923; include the code 1533-385X/14 and $10.00 in correspondence with the CCC.*Assistant Lecturet Department of Aeronautical Engineering, P.O. Box
101 ; [email protected].
tProfessor, Department of Aeronautical Engineering, P.O. Box 81507; [email protected]. Senior Member AIAA.
lProfessot Department Mechanical Engineering, P.O. Box l0; waqar@ iium.edu.my.
FADHLI. OMAR. AND ASRAR t027
N
F
c
A
;
d
N
! o
,
numerically stable and comparable with Yee's total variation dimin-ishing (TVD) method [9] in terms of accuracy.
On the other hand, moving-boundary problems or fluid-structure
interaction problems are the cases where the structure interacts with its surrounding fluid through the movement of its boundaries or the shape and location of the original structue changes due to the effect of the fluid flow. Some examples are rotating Propellers, wing flutter, parachute openings, flapping wings, accelerating aircraft or cars, re-ciprocating engines, vibration of suspension bridges, pulsating blood vessels, etc. Some movements of the boundary are relatively small,
but when they undergo large displacements, rotations, or deforma-tions, the effects offluid-structure interaction cannot be ignored. The need to solve such flow problems using dynamic mesh has attracted many researchers to develop various kinds
ofmoving-grid-interpola-tion techniques, and one ofthem is the arbitrary Lagrangian-Eulerian (ALE) method
[0].
The ALE method was originally introduced in afinite-difference formulation
[
1] and has been successfullyimple-mented in finite-volume (Xia and
Lin[12],
Guardone et al. [13] and Habchi et al.[lal)
and finite-element formulations (Feistauer et al. 115,16l and Sun etal.
[l7]).
In
addition, many researchers have enforced the geometric conservation law (GCL) [18,19] due to theinfluence
of
remeshing techniquein
the stability and accuracyof
the ALE method. However, development of numerical schemes for moving-boundary casesstill
remain specificallyon
the physical properties of the goveming flows. For instance, the ALE application developed by Guardone et al. I I 3] and Feistauer et al. I I 6] is based onthe compressible flow model, whereas Xia and
Lin
[12], Sun et al. t171, and Habchiet
al.
[14]
are basedon the
incompressibleflow model.
This paper proposes a novel technique based on a combination
of
the ALE and FDV methods as a way to overcome diffrculties when dealing with complex flow interactions due to the moving boundary. Our objective to extend the FDV method for multidisciplinaryappli-cations is motivated by the capability of the FDV method in dealing
with the transition and interaction of complex fluid flows. Although
some researchers have implemented the FDV method as an enor indi-cator for adaptive mesh refinement [20], to the authors' knowledge' to
date this method has not been fully incorporated into a fluid-structure
application that involves dynamic meshes.
Details of the FDV theory and the development of the
ALE-FDV
method for two-dimensional applications are written in Sec.ll.
Theapplicability
of
theALE-FDV
methodfor
moving boundaries intwo-dimensional inviscid and viscous flow problems is demonstrated in Sec. III as well as the discussion about its accuracy and validity. We conclude the paper in Sec. IV. The ALE-FDV method is expected to provide a new technique
in
resolving the interactionof
arbitrarybodies in complex flowfields.
il.
Arbitrary
Lagrangian-Eulerian Form
of
Flowfield-Dependent
Variation Formulation
A.
Flowfield-DependentVariationMethodGoveming equations
of
three-dimensional compressibleNew-tonian fluid in conservative, dimensionless form (without the source term) can be written as
dU dF, N,
d,
+C+;: o
(1)where the definition of vectors U , F , and G are given as
a:
Here,
p
and p are density and pressure (all flow properties andquan-tities are dimensionless), respectively, and rz; is the velociry element
in
Cartesian coordinate.E
andt
are the total energy and intemalenergy per unit mass, respectively.
Re-
is the reference (e.g., free-stream) Reynolds number defined asRe-
:
P*V*L/lt*,
wherep
*,
V*,
andp*
are reference density, reference velocity, andrefer-ence dynamic viscosity, respectively; and
/-
is
the characteristiclength.
Pr
is the Prandtl number, and 7is
1.4 for ideal gases. ForNewtonian fluids, viscous stresses z;; are proportional to the velocity
gradients:
I
dui
du;\
, dur,-,,i:
F\;*
u")+
^-;;6u
(3)where d,; is the Kronecker delta, p is the dynamic viscosity
coeffi-cient, and 2 is approximated as
)
:
-2 /3pbased on Stokes'shypoth-esis. Chung et
al. [1]
developed theFDV
methodby
introduced parameters .rn and s6 into a special form ofTaylor seriesofconser-vative variables U and then applied the governing Eq. (1) into such a series. Consider the expansion
of
Uin
the special form of Taylor series up to the second-order time derivatives as.
Idll'
daun+r\
Auntt
-
Orl
"
+t,
dt
)
*ol(FL:*
r"
"Y*')
+
o(Ar3)
(4)' 2 \a1z '-D dr2 I -'
and second-order time derivatives of U as
&u dl. ...1
oFi
dGi\. dldFt
ac*\l
;l
:
-
orl''i
+'')l-t;
-
4
)
*
""r\-'"
-'"
/i
(5)
where AUn+l is defined as (Jn+t
-
U',
and the Jacobians a;, D;, and c;; are defi ned a s dF i / dIJ, dG i / dU,nd
0G i / @U/ dx)'
respectively. Substinrting Eqs.(l)
and (5) into Eq. (4), and assuming third-orderderivatives to be negligible, yields
. I
dF"'
dci
[dAFl+r
dacl+r_]\
AU'-'-
o,l-;;-
d_,-
'"1
a*,
*
d,
))
*ol(!,,,
'
* b,t(dli-' *
{l'
')
2
\dx"-'
'
-"\ dx;
dx1
|
()
|
d\Fi+t
aaGl+r\
\
+srl(a,+r')l*++ll
(6)' "dxi
'\
dxj
dxj ll
Parameters sn and s6 have a value between 0 and
I
and are calledimplicitness parameters because the equation becomes fully explicit
if
both parameters are 0 or fully implicit if they are 1.If
their values are between 0 and 1, they act as a weight factor between explicit and implicit equations. The principal ideain
the FDV method is thatimplicitneJs parameters are flowfield-dependent (i.e., calculated
auiomatically from physical changes in the flow instead
ofpredeter-mined manually to a single number irrespective of the variation of the
local flowfield). Therefore, within Eq. (6), parameters so and s6 are defined to be flowfield-dependent parameters and split into several convection and diffusion parameters s1-sa [1] as follows:
,"(lr+ac)
+s1AF*s.qAG
\/(7\
rr(ar'+
ac) +
s2AF*
saAGParameters .T1 and s2 are named as first-order and second-order convection FDV parameters, whereas
si
alld J4 are named asfirst-order and second-first-order diffusion FDV parameters, respectively' As shown
in
the following equation, convection and diffusion FDVparameters are defined to be dependent on the gradient of the local Gi
le |
| Pui
II
ur'l
F,=
|
1,u,u1*
na,,
l.
LpEJ
L(pEIp)u,
J:_rl :,
IRe-l
'
Ilu1ri1
*
Up/Prl(dt/dx,\
)
FADHLI. OMAR. AND ASRAR
s2=1/2(7+s'l)
*
=
{''"1"'
Mach number and
local
Reynolds number, respectively, within adjacent computational nodes:/ min(
r-.
1)
r.
>a
I ^
/rn_;M*
sr: {
'l
O
r,.<a
M^in*o.
,,:*:-
'M
t
I
M^;n:O
rd)
ar...a
Re-1nlo.
,r:J^6=^4"
o
Rr^rn
Re-in:
osq:l/Z(r+
s\)
(8)In Eq. (8), the constant o is chosen typically about 0.01, whereas 4 is
chosen appropriately between
0.05
and0.2,
dependingon
the problem being solved [4,7]. For the sake of simplicity, ais set as 0.01 and 4 is chosen as 0.I for all problems investigated in this study. If the problem being solved involves high temperature gradients, such as in high-speed flows, the P6clet number can be used insteadof
the Reynolds number.As a result, changing implicitness parameters
s,
and s6 in Eq. (6)into FDV parameters through Eq. (7) yields
| /;rp,-,\
/aac,
'\
|aan+'
-
-a/L,r,l?/
+':r|.?-/_l
-
IT
/a.1P"-'1
/aac;'
\l
\
*+
I
f,r+(',
+r')(?)
+
saft@i*
r,,(.=,.,
/.l,
-n,[gt*gql
*rLl
26,
+
b,)(o++Y)'l
*
olarr)
(e)-AtLTii-1-
;tl r
2
L;trsr
T",'\
d,,T7t
))- "
Reananging the equation further by replacing unknown flux terms at time level n
+
1 with their associated Jacobians and assumingthird-order derivatives to be negligible yields the final form of the FDV
method:
A
a2
..
douAIJn+t
_ _i_tttO,d,U)tr+r _
_"_
(AlEi1LUl"
rr_Ar_=
dxi'
dx,dxi
''
dxi(l0)
where
Di=spils3b;
A1
E;1
:
s{;1
-ito, }
b)(s2a1+
sabl)Q
=
Fi+c,-Llra,
+
b)*,Gt
+
Gj)
(11)B.
Arbitrary Lagrangian-Eulerian Form of Flowfield'Dependent Variation MethodThe fluid is described in an Eulerian manner in fluid mechanics because fluid particles are moving with respect to the fixed compu-tational mesh. In solid mechanics, however, the solid is described in a Lagrangian manner because each nodal point of the computational domain follows the movement of associated structures. The arbitrary
Lagrangian-Eulerian
(ALE)
technique combines Lagrangian and Eulerian descriptions ofa continuum (i.e., fluid and solid) in a single numerical scheme. As a result, ALE-type numerical schemes allow acomputational mesh
to
move arbitrarily as
well
as
followingadequately the movement of existing structues in the fluid' whereas the fluid is still seen in the Eulerian manner.
To apply the FDV method to solve moving-boundary problems,
we propose to develop the FDV method
in
anALE
formulation, which we name as theALE-FDV
method. In addition, because weintend
to
make the proposed method applicablein
solving flowproblems involving complicated geometries, we discretize
it
using the finite-volume method. To our knowledge, up to this point' the FDV method has only been formulated in the Eulerian manner. Thefinite-volume
form
of
FDV
method can be obtainedby
volume integration of Eq. (10) over a conftol volume Q [41. Considering amoving control volume at time instant t as Cl(t) and its boundaries as
f(t),
the integral form of FDV formulation isf Altnll
fl
;
I/
-Y-69: -
|
lp,r,ur
'r+j;tE,rAUl'tt +Q'l.ndl
J Lt
J
t
oxi
_)o(0
f(r)(t2)
Moreover, because the control volume is not fixed
in
space for a numerical method involving deforming mesh, the rate of change of a control volume mustbe taken into account. To determine scalarquan-tities (i.e., density, pressure, and velocity components, etc.), inside
the control volume, ALE-type numerical scheme uses Reynolds's transport theorem [10] to connect the rate of change of the control volume
with
the changesof
scalar quantities inside the control volume. Consider the boundaryof
the control volumeO(t)
movewith velocity
u.,
and q is a scalar quantity inside the control volume; Reynolds's transport theorem gives the time rateof
change of the control volume asN
o
;
N
o
3
)
o
*,
o(r)
Ito":
c)(r)
I*da+
r(4lva,,'ndr
(r3)
Replacing rp with fluid density p, momentum
pr;,
and specific total TereynE,Eq. (13) can be rewritten in vector and semidiscrete form
Ll
t
udo'l'-'
:
t^-y!de+
[I],u,n.ndr
r,4)
At
l./
'r,r
- I
;{,,
at
!r,
The FDV method is applied by substituting the first term of the
right-hand side of Eq. (14) with the FDV formulation written in Eq. (12)' which yields
Ati
udo'l'-'
:
-
flo,orr,
'
+3rr,
i*Ir)n-,
At
f,f
o,,r I
J,,L'
d,i
+
(Q
-u'u))'ndr
(15)Equation ( I 5) is linearized by applying the chain rule on the left-hand side term:
o[/,,,,r0n]
n*'
:
6s'*'[,/*,,
on]'.'
The right-hand side ofEq. (15) is linearized by lagging the
D
and E terrns one time step behind, which yields the ALE form of the FDVmethod:
f t
'ln I
f f
dLU"',1
I dol +tt
llD,(LIJtn-t-Eij+\Lllta-t
l.zdr:
LJout
J
J
t'
'oxi
J r(r)r
f f
1nl
-N
J _
l(Q'^-Il"a,,l-ndl-IJ'al
.
L,/oul
I dol
I
(l'll
I-(1)
Equation (17)
is
applicablefor
three-dimensionalflow
problems, and any standard finite-volume technique can be used to discretizethe volume and surface integrals
in
it.
Howeverin
this paper, the application of the ALE-FDV method is focused on two-dimensional moving-boundary problems, and we adopted vertex-centeredfinite-+u'a[/
,',ao]"*'
r(J-r)
..,-,
o
ac&r)
?
N
;
s.
d
s
;
N
r
F
o
I(J+r)
{x)
Fig.
I
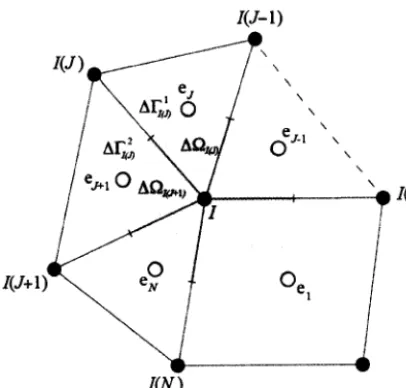
Deffnition of cell I for vertex-centered finite volume.volume method to discretize Eq. (17). Vertex-centered finite volume was chosen because the implementation of the wall-boundary condi-tion can be defined explicitly (e.g., the velocity of the flow on some pointof thewall is same as the wall velocity of thatparticularpointfor moving-boundary problems) without using some additional points, as in the case ofcell-centered finite volume, where usually additional cells called ghost cells are used to apply the wall-boundary condition.
Consider a vertex 1 surrounded by several triangular and quadrilat-eral elements €"/, as shown in Fig. 1. The cell (i.e., control volume)
of
vertex 1 is defined by joining centroid of its surrounding elements' Face Al117,lor
Af7,7;2is
formed eitherby
connecting centroid element e7 or element ey11 with the median of line connecting vertex 1 and its neighbor vertex 1(J). On the other hand, the subvolumeof
cell
/,
AC)n7,, is formed by joining the median of line 1-
I(J
-
l),
centroid elements e7, the medianofline
1-
1(J), and vertex 1.Based on Fig.
I, ALE-FDV
formulation can be discretized asFADHLI, OMAR, AND ASRAR
b) t = 0.57
Fig.
2
Motion of the deformable mesh.In
Eqs. (18) and (19), interface variables can be approximated byusing the centroid value of adjacent cells. Because interfaces values are defined at the median ofline
/
-
1(,/), as shown in Fig. l, interfacevariables can be easily determined
by
the average between twoconnecting cell centroid values. On the other hand, the gradients of
interface variables can be approximated by either the technique called least-square gradient reconstruction (LSGR) method [21] or by the Green-Gauss method [22] as follows:
(20)
where,
in
two-dimensional space,V is
a
small area where the interface value O resides, and S is the boundary or perimeter of such an area.In
this
study, we adopted the Green-Gauss method to approximate the gradientof
interfaceAU
[third termin
Eq. (18)] becauseit
is
much simpler than the LSGR method that requiresmatrix manipulation. For example, in Fig. 1, the gradient of interface
AU at the median of line 1
-
1(,D (i.e., AU7) is determined by takingV as the combined area of two adjacent elements e7 and e711, and @
is
the
average valueof AU
at
each boundary dS, namely lineI
-
I(J
-
r),I(J
-l)
-1(/),
I(J)
-
r(J
*
1), andI(J +
I)
-
I.
Similarly, the interface gradientof
the velocity aswell
as theintemal energy
in
the viscousflux
G;
are interpolated using the Green-Causs method. On the other hand, the inviscidflux
F;
is approximated as the numericalflux
by the high-order monotonic upstream-centered scheme for conservation laws (MUSCL) scheme for the unstructured grid [23], as shown infu'
(21), instead of takingan average
of
analyticalflux
between two cell centroids, which isonly first-order accurate: I
(F
-
IJu,,) .n
:
:(F(Uil
+
F(U)
-
(Un+
U)a.)'
nL
(21)
aul.'[iaon,,]'*'
*o,f
["i
(oo)'.'
where known terms on the right-hand side are
N TN 1n*l
n,
:
-ar
I
l(Qn-
rl^u.l'
n AFl,,r,-
ui
LII
aor,r,
I
,1 Ll:t J
(1e)
In
Eq. (21),A
is the convection Jacobian matrix evaluated based on Roe's average properties, and 1 is the identity matrix. lnterface gradients of fluxesin
Q
li.e.,d/dxi
(Fi
*
Gi) in
Eq' (11)l can be approximated by averaging the gradients of fluxes in cell 1 and its adjacent cell 1(,/), as shown in Fig. l, where gradients in each cells are determined by the Green-Gauss method using theF;
and G; at thecell interfaces. Besides conservation laws of mass, momentum' and energy, the geometric conservation law (GCL) [18] is required for
ALE+ype
numerical schemes.To
makethe
formulationGCL-compliant, the cell volumes in Eqs. ( I 8) and ( 19) are evaluated by its boundary velocity as follows:
n
^r
+Eir(*or)'*'
"^.],,,,
l,l;
(*.),
:i1,"
,*
-|to(o^,r,,,)
-
r(,^
")rcan-'L)
ofion,]".'
:
^'[Ei(,.,
n)ory,,,f"*"'
(22)
Finally, the resulting equation wriften in compact form is
[image:4.596.52.255.49.243.2]i030
Table
I
Velocities maximum error normL*
(a;)Time
L^
(u,l
L-
(ut)0.5r
1.338-
15
1.948-
lsT
l;7'7E-
15
1.448-
15K t LU',;+ r + r</1 r )
AUIIi
+
... + K r
o
LU',;[,'+
...+Kr,",
A Uit
\
:
R, (23\where K7 and Klgy denote the collective sum of contributions for
the main cell and its surrounding cells, respectively. As far as the unstructured mesh is concemed, combining Eq. (23) for all cells in the computational domain
will
result in a linear system of equationswith large sparse matrix, namely
[Kl:
Lrl[au'+r]:
LRI (24)To solve the linear system of Eq. (24), we used an iterative method: the restart general minimal residual (restart GMRES) algorithm [24]. In addition, restart GMRES is combined with the left-block Gauss-Seidel preconditioner [25 ] to accelerate the convergence of solutions.
Although other preconditioners that converge faster exist, the
Gauss-Seidel preconditioner was chosen because it is relatively simple.
III.
Resultsand
DiscussionsA.
FreestreamPreservationTo verify whether the
ALE-FDV
method satisfied the GCL, we conducted a freestream preservation test on a mesh that deformed likea wave, as depicted in Fig. 2. The mesh is a square domain with a size
of
I
x
I
unit squared, and as shown in Fig. 2a, the mesh has initially 5 12 uniform triangular elements. The motion of the mesh is defined as [261x':*t:xilaxi
(2s)
with I
:
l,
2
for two-dimensional cases. The amplitudeA; is
set as 0.1; the reference lengthL;
and timeI
are set as 1.0 and 20, respectively; constants cI
and c 2 are 4n ; and constant cr is z. The test has been performed using a time intervalAl
:
0.01. Inviscid uniform flow (a 1:
1.0, uz:
0) was set as an initial and boundary condition.The solution was advanced in time until r
:
7, where the mesh is at its maximum distortion, as depicted in Fig. 2c.Results of maximum error norm
L-
of velocities u ; and a2 at time instant r:0.5T
andr:
Z
are reportedin
Tablel.
The present FADHLI. OMAR. AND ASRARAx;(r)
:
^o,(+),'"(,,
fr),"("
fr),'"('?)
Fig.5
mesh. 0.1
-0.1 a
N J
t"
b:
;
N
N
E
r
F
4.2
6
o.s
-0.4
-0.5
-0.6
-0.7
exact
-Sua4
Etna
Ie-05
l0
1000Cornparison of density error between deformed and stationary
le-00
le-01
le-02
I F ar1
le-03
le-04
-1.5
-l 4.5 0 0.5 I
1.5
2x
Fig.3
Comparison between exact solutions and numerical solutions ofpressurecoefficientalong.r2
= 0atJ =
0.1.100
\iN
"'ti
{il
b) Triangular mesh
Fig.4
Density contour at timeI
=
0.1.L@(quad-strD
+
L2(quad-sta0
-l-L6(tri-stat)
-+-L2(tri+taO
--L-Lo(quad-move) g-L2 (quad-move) -€]-Lo(tri-move)
+
\
8:::;;;gi.$
[image:5.596.307.524.315.522.2] [image:5.596.49.267.316.526.2]FADHLI. OMAR. AND ASRAR t 031
(26)
results show that the
ALE-FDV
method has errors around 10-15, which is closed to machine zero for double-precision computation. Therefore, freestream preservation is achieved, and theALE-FDV
method is verified to be GCl-compliant.B.
Propagating Isentropic VortexThe accuracy ofthe proposed ALE-FDV method for a deformable mesh is verified by the following, propagating isentropic vortex in
two-dimensional inviscid flow. Initially, the flows are perturbed by an isentropic vortex centered at (0,0). The perturbed values ofvelocity,
density, and pressure are given l26,27lby
a) -1.84 deg (Pitching up)
c) 1.47 deg (Pitching up)
u^,f,
"*vlr/r(t
-#))
lt
-
rrr<r-
r)uh".
*n
(t-
#))"'-'
il
N J
F
c
I
;
N
! r
!
U,:
P,:
P,:
l/YPl
where
r
is
the radial distanceof
any pointin
the computational domain from the vortex center at time ,, and U.u* is the maximum velocity at distancer
:
b.The radial distance r is defined as.&
t*
f,
|
\iltr
,e
t
d) 0.02 deg (Pitching down)
FADHLI. OMAR. AND ASRAR
-
Uur)2a
(x,
-
Votl2r=
(27)The exact solutions are then given by
(28)
tindon [28]
r
Venkatakrishnan and Mavriplis [30] O present
--2-l0l
Angle of attaclg deg Fig.
7
Comparison of liftcoefficient-01020304050
Angle ofattack, deg
Fig.8
Comparisonoflift
coelficent c1 and drag coefficient c7.Table
2
Summary of unstructured meshesName
Nodes
Smallest element sizeCoarse
12,9WMedium
18,570Fine
24.1700.00048 0.00036 0.00025
l'r,l:l
y'
l.l:,::::l
tpJ
L0J
L p, I
o
9a
I 0.5
0.25
0
4.25
i.e., the vortex
will
retain its shape while convecting in the domainwith freestream velocity (U6, Vs) through time. The initial condition is given by Uo
:0.5,
y0:
0.0, U-u":
O.SUy, and b:0.2.
The computational domain is set as 4 x 4 unit squared, centered at (0' 0).Two kinds
of
mesh are employedin
this case, namely uniform quadrilateraland uniform
triangular mesh,to
demonstrate the applicabilityof
the proposed method for unstructured mesh. Bothkinds of mesh are deformed in time by the motion defined in Eq. (25). In this case, the amplitude A; is set as 0.2; the reference length L; and dme
f
are set as 4.0 and 0. l, respectively; constants cI
and c2 are2t;
and the constant c, isr.In
addition, similar to [26], a very small time interval is chosen(At
:
5x
l0-5)
to eliminate the effectof
timeintegration
eror
on the accuracY.The accuracy of the proposed method is analyzed at time instant
t
=
0.1 because the mesh has the largest deformation at this timeregardless
of
the typeof
the mesh. Numerical resultsof
presswecoefficient
c,
for both meshes are in good agreement with the exact solution, as shown in Fig. 3. On the otherhand, as shown in Fig.4, thevortex as depicted by the density contour for the triangular mesh Gig. ab) qualitatively preserves its shape better than the vortex in a quadrilateral mesh (Fig. 4a). However, both meshes do not preserve the shape of the vortex exactly as predicted by the exact solution (i'e., a circular shape) due
to
the dissipation efforof
the second-orderMUSCL scheme used
in
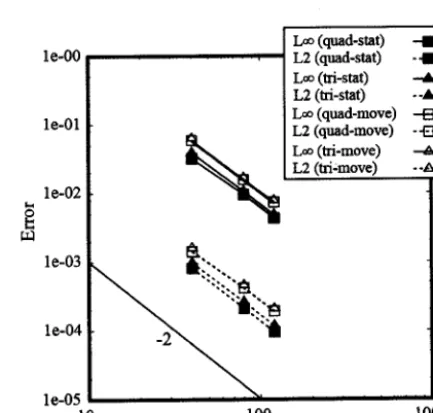
the proposed method. Furthermore' the numerical error ofthe density distribution in terms ofaverage squared error norrn L2 and maximum error normL-
for three different gridresolutions with the number of nodes
N
:
1600, 64OO' and 14,400 are plotted in Fig. 5. As a comparison, the errors for a stationary mesh are plotted in the same figure. Overall, slope ofthe errors for each case is close to-2,
implying that the method is second-order accurate inspace.
In
particular, the enors producedby
the quadrilateral and triangular meshes are the same, but the errors due to the motion of the mesh are slightly higher than the stationary mesh.C.
Oscillating NACA 0012 AirfoilThis case was first investigated experimentally by Landon [28] and since then has been used
by
many researchers as a benchmarkproblem
to
validate numerical solutionsof
moving bodies insideinviscid compressible flows. ln this case a NACA 0012 airfoil which
oscillates harmonically about its quarter chord in a flow with free
stream Mach number
M
:0.75
is
considered'The
oscillating motion is defined by the angle-of-attack function:vorticity 100
to
I
-100 a
d
;
P d
{
I
;
N
= N
€
,
4.5 L -J
Vorllcfty
lfn
t
]
:
=0
t
-lm
{}
b) Schneiders et al. [31, Fig.
9
Comparison of vorticity profile at 44 deg angle of attack.o
Visbal and Shang [33]----
Lomtev etal. [34]---
Schneiders et al. [31]-
present
[image:7.595.36.279.59.553.2]FADHLI. OMAR. AND ASRAR 1033
a(t)
:
6.616*
2.51 sin(urt) (2e)where the angular velocity is given by ur
:
2kU * / c, and the reduced frequency is k:
0.0814. The numerical simulation was conductedby using an unstructured mesh with 6700 cells. To properly capture the shock, the MUSCL scheme for the unstructured mesh combined
with minmod limiters [23] has been used to approximate the inviscid flux. Figure 6 shows the instantaneous pressue contour around the airfoil at several angles
of
attack. The strength of the shock wave decreased, and its location shifted from the lower to the upper surface as the airfoil pitches up, qualitatively similar to the results shown byMurman et al. [29].
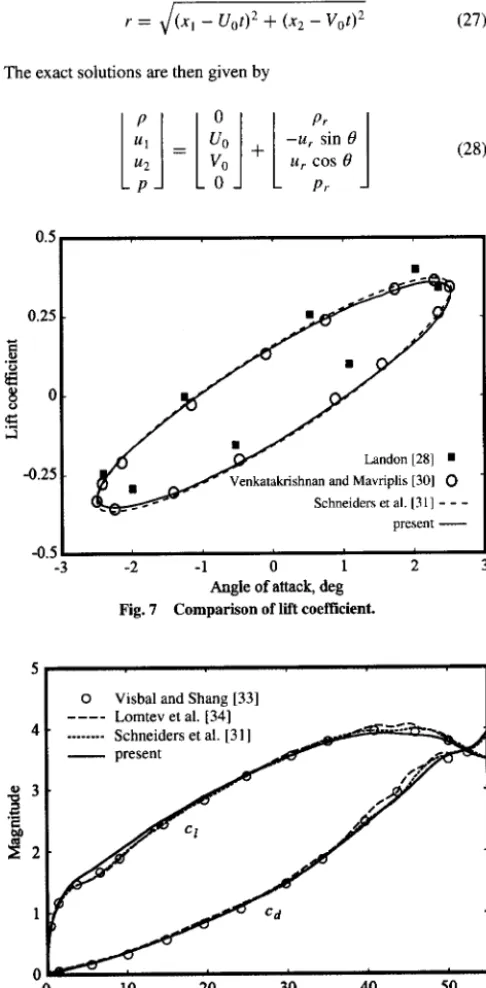
As shown in Fig. 7, the hysteresis of the lift coeffrcient obtained by
the present method is in good agreement with the numerical solutions reportedby Venkatakrishnan and Mavriplis [30] and Schneiders etal.
[31] butlack agreement with the experimental results of Landon [28j. The discrepancy between numerical and experimental data is perhaps due to the viscous effect of the flow in the experiment. Mohaghegh and Jafarian [32] reported that the interaction ofthe boundary layer and the shock wave produced by the airfoil has reduced the strength
of
the shock comparedwith
the inviscid simulation, resulting ina)t=3.5
differences between experimental data
and inviscid
numerical solutions.D.
Rapirlly Pitching NACA 0015 AirfoilIn this section, we consider a laminar viscous flow past a NACA 0015 airfoit that is pitched rapidly from 0 deg angle of attack at a constant pitch rate:
'a7
:
,olt-
*n(-.uf11
about the axis located at the quarter-chord. The final pitch rate is set as rll0
:
0.6, and the time taken by the airfoil to reach 997o of ar6 is givenby f0
:
1.0. The freestream Mach number and Reynolds number areM
:
0.2 and Re:
10,000, respectively. The numerical simulation was conducted using an unstructured mesh with 28,134 grid points.This case was first studied by Visbal and Shang [33] and later was used for validation of numerical solutions by Lomtev et al. [34] and Schneiders et al. [ 3 I l. Figure 8 shows the comparison of drag and
lift
coefficients obtained by the present method with others. The uends
of
(30)N J
o
E
A
=
;
N
F
N
q
t
c) r = 15.0
[image:8.596.128.445.291.728.2]i034 FADHLI. OMAR. AND ASRAR
,t::11-:i
[image:9.596.123.445.48.492.2]\l\.).,':
Fig.11
ar=
3.0 Qeftfigures: present' rightfigures: Sen etal. [35]).:
;
@
G'
c
A
;
N
r
'
b)l=3.0
c)t=5.0
1ift and drag coefficient from the present results match quite well with those available in the literature.
The vorticity profile at 44 deg angle
of
attack obtainedby
the proposed method is shown in Fig. 9a. As a comparison, Fig. 9b also shows the sarnevorticity results obtainedby Schneiders etal. [31 ]. Both figures show a similar pattem of vortex strucnues such as the leading-edge vortex and traiting-edge vortex detached from the airfoil and several shear-layer vortices existing on the upper surface of the airfoil'E.
Rotating CylinderIn
this problem, a laminar viscous flow with Re:
1000 past a circular cylinder that rotates impulsively from rest is considered. Two angular speeds are used:ro:
1.0 anda:3.0.
The unstructured mesh with 18,570 cells was used for both cases. In addition, for thepurpose
of
the grid-independence study,two
other meshes with different numberof
cells were generated from the original mesh. Information on all meshes is summarized in Table 2. [image:9.596.138.438.613.739.2]a) Coarse mesh
FADHLI. OMAR. AND ASRAR
b) Fine mesh Fig.
13
Florvfield atI
=
8.0 for case ar=
1.0.2.5
ot2
'o
o0 6t
E
r.sN
;
;
po
5
9
H
;
N
N
F
!
t
o
0.5
x---'-'--'-"""*"x""-':-l---*.x
applications, motivated
by
an interestto
extendits
capability tocomplex fluid-structure interaction, and the formulation is
discre-tized using vertex-centered finite-volume method. Two cases
of
prescribed boundary motion in inviscid flow and another two cases inviscous flow have been chosen as benchmark problems to validate the
ALE-FDV method. The results obtained are in good agreement with
other numerical/experimental methods, thus confirming its
applica-bility in solving moving-boundary problems.
References
[l
Chung,T.
J., "Transitions and Interactionsof
Inviscid/Viscous, Compressible/Incompressible and Laminar/Turbulent Flows," lnterna-tional Journal for Numerical Methods in Fluids, Vol' 31' No. 1, 1999' pp.223-246.doi: I 0. I 002/(ISSM I 097-0363
[2] Yoon, K. T., and Chung, T. J., "Three-Dimensional Mixed Explicit-Implicit Generalized Galerkin Spectral Element Methods for High-Speed Turbulent Compressible Flowsl' Computer Methods in Applied Mechanics and Engineering, Vol. I 35, No. 3, 1996, pp- 343-361
-doi: I 0. 10 I 6/0045-7825(96)01 066-3
[3] Yoon, K. T., Moon, S. Y, Garcia, S. A', Heard, G. W., and Chung' T. J.' "Flowfi eld-Dependent Mixed Explicit-lmplicit (FDMEI) Methods for High and Low Speed and Compressible and Incompressible Flows"' Computer Methods in Applied Mechanics and Engineering, Vol. 151' No. 1, 1998, pp.75-lM.
doi:1 0.1 0 I 6/50045-7825(97)00 I 1 4-X
[4] Chung, T. J., "Computational Fluid Dynamics ]' Cambridge Univ. Press, New York, 20O2, Chaps. 6, 7.
[5] Schunk, G., Canabal, F., Heard, G., and Chung, T. J.' "Unified CFD Methods Via Flowfield-Dependent Variation Theory," 30th Fluid Dynamics Conference, AIAA Paper 1999-3715, June-July 1999.
[6] Elfaghi, A. M., Asrar, W., and Omar, A' A., "Comparison of High-Order Accurate Schemes for Solving the Nonlinear Viscous Burgers Equa-tionl' Australian Journal of Basic and Applied Sciences,Yol.3, No' 3'
2009, pp. 253G2543.
[7] Elfaghi, A. M., Asrar, W., and Omar, A. A., "Higher Order
Compact-Flowfield Dependent Variation (HOC-FDV) Solution
of
One-Dimensional Problems," Engineeing Applications of Computational Fluid Mechanics, Vol. 4, No. 3, 2010, pp.43U40.
doi: I 0.1080/19942060.2010.1 10 15330
[8] Richardson, G. A., Cassibry, J. T', Chung, T. J.' and Wu' S. T., "Finite Element Form of FDV for Widely Varying Flowfields," Journal of Computational Pftysics, Vol.229, No' 1,2010' pp. 145-16'7. doi: 1 0. 10 1 6/j jcp.2009.09.O23
[9] Yee, H. C., 'A Class of High-Resolution Explicit and Implicit Shock-Capturing Methods," NASA TM-101088, 1989.
[10] Donea, J., Huerta, A., Ponthot, J. P., and Rodriguez-Fenan'
A'''Arbi-trary Lagrangian-Eulerian Methods," Encyclopedia of Computational Mechanics, edi@d by Stein, E., Borst, R. D', and Hughes, T. J. R., Vol. I 'John Wiley & Sons, New York,2004, pp' 1-25, Chap. 14.
tl 1l Hirt, C. W., Amsden, A. A., and Cook, J. L., 'An Arbitrary Lagrangian-Eulerian Computing Method for All Flow Speeds," "/oumal of Compu' tational Physics, Vol. 14, No. 3, 1974, pp- 22'7-253.
doi:10.101 6/0021-999 1(74)9005 I -5
ll2l
Xia, G., and Lin, C. L.,'An Unstructured Finite Volume Approach for Structural Dynamics in Response to Fluid Motionsl' Computers and Structures, Vol. 86, No.7,2008, pp. 684-701'doi: I 0. 1016ij.compstruc.2007.07.008 2.0
2.3 3.0 3.5 4.0 4.5
5.0Element size
(x
104)Fig.
14
Average lift and drag coellicient of each mesh for case ar=
1.0'Comparisons of the flowfield obtained using the medium-sized
cells with the results
of
Sen et al.[35]
are shownin
Fig.
10 fora
:
1.0 and Fig. 71 forro:
3.0. Overall, both results agree quali-tatively. However, one can see some minor differences, such as att
:
8.0in
Fig. 10, where the utmost right vortex is weaker' and att
:
1.5 in Fig. 11, where the locationof
a vortex near the cylinder surface is unmatched and the formation ofa secondary vortex does notexist when compared
to
the resultsof
Senet al.
1351. Neverthe-less, similar flowfield sffuctures can be observed by comparing the curent results (t:3.5, co:
1.0 andt
:
5.0,a:3.0)
and the experimental results of Badr et al. [36], as shown in Fig. 12.Next, we compare the results of the case of ar
:
1.0 with the results obtained using the coarse mesh and the fine mesh.As
shown inFig.
13, the coarse mesh and fine mesh gave a similar pattemof
flowfield,with
the resultsof
the medium-sized mesh shown in Fig. 10b, indicating that all meshes gave consistent results. Figure 14 shows plot ofthe averagedlift
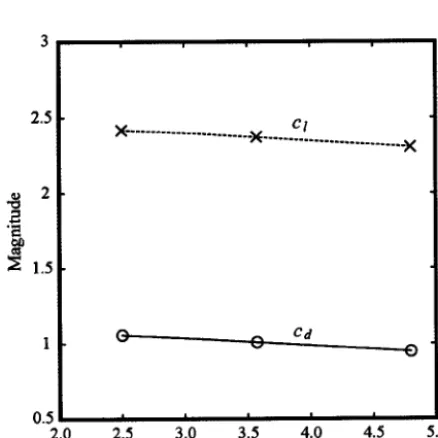
coefficient c1 and the drag coefficient c2 vorSUS the smallest element size ofeach mesh. The average c/ andc/
were determined based on the time period of r:
5.5 tot
:
15.0. The plot shows that good linear grid convergence with small differ-ences of c1 and c7 from all meshes is obtained. Therefore, we can conclude that the effect of the mesh on the results is small, and the solutions obtained by the medium mesh shown in Figs. l0 and ll
are grid-independent.IV.
Conclusions
The
capabilityof
the ALE-FDV
methodin
solving
[image:10.596.127.443.49.198.2] [image:10.596.47.266.215.434.2]I 036
[13] Guardone, A., Isola, D., and Quaranta, G., 'Arbitrary Lagrangian Eulerian Formulation for Two-Dimensional Flows Using Dynamic Meshes with Edge Swapping," Journal of Computational Physics, Vol. 230, No. 20,201 I, pp.7706-7722.
doi: 1 0. 10 16/j jcp.20l 1.06.026
ll4l
Habchi, C., Russeil, S., Bougeard, D., Harion, J. L., kmenand, T,Ghanem, A., Valle, D. D., and Peerhossaini, H., "Partitioned Solver for Strongly Coupled Fluid-Structure Interaction," Computers & Fluicls, Vol. 71, Jan. 2013, pp. 306-319.
doi: 10. I 016/j.compfluid.20l 2. 1 1.004
[5]
Feistauer, M., Hasnedlov6-Prokopovii, J., Horddek, J., Kosik, A., and Kudera, V., "DGFEM for Dynamical Systems Describing Interaction of Compressible Fluid and Structures," Joumal of Computational arul Applied Mathematics, Vol. 254,Dec. 2013, pp. 17-30.doi: I 0. 1 016/j.cam.20i 3.03.028
[16] Feistauer, M., Kudera, V., and Prokopov6, J., "Discontinuous Galerkin Solution of Compressible Flow in Time-Dependent Domainsi' Mathe-matics and Computers in Simulation, Vol. 80, No. 8, 2010, pp. 1612-1623.
doi: 1 0. 10 16/j.matcom.2009.01.020
I
l7]
Sun, X., Zhang, J. 2., and Ren, X. L., "Characteristic-Based Split (CBS)Finite Element Method for Incompressible Viscous Flow with Moving Boundaries," Engineering Applications
of
Computational Fluid Mechanics, Vol. 6, No. 3,2012,pp.461474.[i8]
Thomas, P. D., and Lombard, C. K., "Geometric Conservation Law and Its Application to Flow Computations on Moving Gridsi' AIAA Joumal, Vol. 17, No. 10, 1979, pp. 1030-1037.doi:l0.2514/3.61273
t19l Guillard, H., and Farhat, C., "On the Significance of the Geometric Conservation Law for Flow Computations on Moving Meshes"' Com-puter Methods in Applied Mechanics and Engineering, Vol. 1 90' No. I I ' 2000, pp. r46't-1482.
doi:1 0. I 016/50045-7825(00)001 73-0
t20l Heard, G. W., "Flowfield-Dependent Variation (FDV) Method for Compressible, Incompressible, Viscous, and Inviscid Flow Interactions with FDV Adaptive Mesh Refinements and Parallel Processing," Ph.D. Dissertation, Univ. of Alabama, Huntsville, AL,2OO7 .
[2ll
Versteeg, H. K., and Malalasekera, W., An Introduction to Computa' tional Ftuid Dynamics: The Finite Volume Method, Pearson Education, Harlow, England, U.K., 2007, pp. 321-323.[22] Diskin, 8., Thomas, J. L., Nielsen, E. J., Nishikawa, H., and White' J. A.'
"Comparison of Node-Centered and Cell-Centered Unstructured Finite-Volume Discretizations: Viscous Fhtxes," AIAA Journal, Vol' 48, No. 7' 2010, pp. 132G1338.
doi:'tO.251411.4494O
[23] Darwish, M. S., and Moukalled, F., *TVD Schemes for Unstructured Gids)' Intemational Journal of Heat and MassTranslea Vol. 46' No. 4' 2003, pp. 599-6 1 1 .
doi:1 0. 10 1 6/5001 7-93 l0(02)00330-7
[24] Saad, Y., and Schultz,
M.
H., "CMRES:A
Generalized Minimal Residual Algorithm for Solving Nonsymmetric Linear Systems," SIAM Joumal on Scientific and Statistical Computing, Vol. 7, No' 3' 1986' pp. 856-869.doi:10.1 I 3710907058
[25] Persson, P O., and Peraire, J., "Newton-GMRES Preconditioning for Discontinuous Galerkin Discretizations of the Navier-Stokes Equa-tions," SIAM Journal on Scientific Computing, Vol. 30, No' 6' 2008' pp.2709-2733.
doi: 10. I I 371070692108
t26l Yu, M. L., Wang, Z. J., and Hu, H., 'A High-Order Spectral Difference Method
for
Unstructured DynamicGidsl'
Computers&
Fluids, Vol. 48, No. l, 201 I, pp. 84-91.doi: I 0. 1016/j.compfluid.20l 1.03.015
t27l Hu, R Q., Li, X. D., and Lin, D. K.,'Absorbing Boundary Conditions for Nonlinear Euler and Navier-Stokes Equations Based on the Perfectly Matched Layer Techniquel' Joumal
of
Computational Physics, Yol.227 , No. 9, 2008, pp. 43984424.doi: 10. 10 l6ljjcp.2008.01.010
[28] Landon, R. H., "Compendium of Unsteady Aerodynamic Measure-ments," AGARD Rept. 702, Neuilly sur Seine, France, 1982.
[29] Murman, S.
M.,
Aftosmis,M.
J., and Berger,M.
J., "lmplicitApproaches for Moving Boundmies in a 3-D Cartesian Method," 41st Aerospace Sciences Meeting and Exhibil, AIAA Paper 2003-1119' Jan. 2003.
[30] Venkatakrishnan,
V,
and Mavriplis, D. J., "lmplicit Method for the Computation of Unsteady Flows on Unstructured Gidsi' Joumal of Computational Physics, Vol. I 27, No. 2, 1996, pp. 380-397. doi: 10. I 006/jcph .'t996.0182[31] Schneiders, L., Hartmann, D., Meinke, M., and Schriider,
W,
'An Accurate Moving Boundary Formulation in Cut-Cell Methods," Joar-nal of ComputatioJoar-nal Physics, Vol. 235, Feb. 2013' pp. 78G809. doi:10. l0 16/jjcp.20 12.09.038[32] Mohaghegh, M. R., and Jafarian, M. M., "Unsteady Transonic Aerody-namic Analysis for Oscillatory Airfoils Using Time Spectral Method"' Intemational Joumal of Mechanical and Materials Engineering,Yol.
l,
No. 4. 2010. pp. 264-27 l.l33l Visbal, M. R., and Shang, J. S., "Investigation of the Flow Structure Around a Rapidly Pitching Airfoil," AIAA Joumal,Yol. 27' No. 8' 1989' pp.104ut-1051.
doi:10.2514/3-1O219
[34] Lomtev, I., Kirby, R. M., and Karniadakis, G. E.'
'A
Discontinuous Galerkin ALE Method for Compressible Viscous Flows in Moving Domains," Journal of Computational Physics,Yol. 155' No'l'
1999' pp. 128-159.doi: 10. 1 006/jcph. I 999.633 I
[35] Sen, S., Kalita, J. C., and Gupta, M. M.,
'A
Robust Implicit Compact Scheme for Two-Dimensional Unsteady Flows with a Biharmonic Stream Function Formulation," Computers&
Fluids' Vol. 84' Sept' 2013, pp. 141-163.doi: 10. l0 I 6/j.compfluid.20l 3.05.016
t36l Badr, H. M., Coutanceau, M., Dennis, S. C. R., and Menard, C''
"Unsteady Flow Pasta Rotating Circular Cylinder at Reynolds Numbers 103 and 10a," Joumal of Fluid Mechanics,Yol.220' No' 1' 1990'
pp.459484.
doi : 1 0. 1 0 I 7/500221 120900033 42
Z.J.Wang
Associate EditorFADHLI. OMAR. AND ASRAR
'r
d
;
;
ii
;
;
N
N
! r
![Fig. 10 ar = 1.0 (left figures: present' right figures: Sen et al. [35]).](https://thumb-us.123doks.com/thumbv2/123dok_us/8766170.896544/8.596.128.445.291.728/fig-ar-left-figures-present-right-figures-sen.webp)
![Fig.11 ar = 3.0 Qeftfigures: present' rightfigures: Sen etal. [35]).](https://thumb-us.123doks.com/thumbv2/123dok_us/8766170.896544/9.596.123.445.48.492/fig-ar-qeftfigures-present-rightfigures-sen-etal.webp)