2017 2nd International Conference on Computational Modeling, Simulation and Applied Mathematics (CMSAM 2017) ISBN: 978-1-60595-499-8
Dynamical Modelling and Positioning Control Simulation of a Spherical
Robot Driven by Three Omnidirectional Wheels
Yong-hua HUANG
*, Gan-min ZHU, Chang-sheng WANG and Hao HUANG
School of Mechanical and Electrical Engineering, Guilin University of Electronic Technology, Guilin, China, 541004
*Corresponding author
Keywords: Spherical robot, Omnidirectional wheels driving, Dynamical model, Position regulation.
Abstract. In this paper, we concerned on the dynamical modelling and the position control problem for a novel spherical robot which was driven by three omnidirectional wheels. We first introduce the mechanism of our spherical robot. And then considering the noholonomic constraints of the shell contacting with the omnidirectional wheels and the shell contacting with the ground, we developed a nonlinear dynamical model for the system by use of Chaplygin equation. With the model, we suggested that the robot was an under-actuated system which consists of six independent velocities and three driving-torque inputs. By linearized the position variables of the shell, we designed a controller to regulate the position of the system according to the Theorem of Partial Feedback Linearization. Numerical simulations were exploited to show the effectiveness of our controller.
Introduction
Driving mechanism is one of the most critical factors in determining the performance of a spherical robot. In the past four decades, several kinds of mechanism have been used to design a spherical robot. Considering the working principle differences of the driving mechanism, at present, the spherical robot can be sorted into two types, that is, the eccentric moment driving spherical robot and the angular momentum driving spherical robot.
For the former, the working principle was summarized as that the driving mechanism of the spherical robot force the COG (center of gravity) of the system deviating from the vertical sphere center line, in this case, the balance of the system is destroyed, and under the action of gravity moment the sphere shell then run on the ground. In [1], A. Halme et al. proposed a spherical robot with a single wheel on the bottom of the spherical shell. He believed when the wheel rolls along the inner surface of the shell, an eccentric moment would be aroused, so the shell began running at once. In [2], Ranjan Mukhejee et al. presented a spherical robot that was driven by four moving masses. Mukhejee gave the idea when the masses move on their individual leadscrew along the sphere diameter, the COM (center of mass) of the system should be changed, and as a result, the shell would begin to roll. In [3,4], There are similar scheme. In [5], J Alves et al. considered a four wheels vehicle in his spherical robot. Alves suggested that the running vehicle on the bottom of the inner shell could give a moment to drive the shell running. In [6], Zhan et al. exploited an omnidirectional as steering wheel and a longitudinal driving wheel to drive the sphere shell. Zhan addressed that if the exact rotations of the two wheels were perform, the shell should run in all direction. Similar to Zhan, in [7], Wang discussed a spherical robot of two omnidirectional wheels on two orthogonally axis. In [8], Sun et al. proposed a weight-pendulum of two degree of freedom in their spherical robot. Sun argued that, as the pendulum could be driven to swing in all directions, the robot then might run in omnidirection. In [9], Zhao et al. presented a spherical robot with two coaxial eccentric masses. Zhao believed when the masses run with different acceleration and velocity, the robot should consequently move in all direction. The similar mechanism was also proposed in [10].
the running shell and the ground, with the principle of the angular momentum conservation, the shell would rotate reverse to that of the running rotor. Furthermore, if we alternated the speed and direction of the rotating rotor, the omnidirectional motion of the spherical robot then could be gotten. In [11], Toshiaki Otani et al. developed a spherical robot driven by a three axis mechanical gyroscope. The robot’s gyroscope was fixed on a gimbal inside the sphere, and when it rotated with high speed, they believed, there would be a counter moment that can drive the shell to run definitely. In [12], V. Joshi et al. proposed a spherical robot with double rotors which shared the similar principle in [11].
By now, there is a trend that the spherical robot of the former showed more advantage than the spherical robot of the latter, e.g., more steering flexibility, lower speed of the driving mechanism. Especially, the robot developed recently in [9] and [10] that used omnidirectional wheels, have exhibited a great deal of extinguished performance. For this reason, the former is still attracting in spherical robot research. Furthermore, utilizing the omnidirectional wheels to develop a driving mechanism for a spherical robot might be a promising technology in the future.
In this paper, we consider a new type of spherical robot driven by three inner omnidirectional wheels. At first, we introduce the mechanical structure of our spherical robot in detail; and next, we develop a dynamical model for the robot system by using Chaplygin equation; moreover, we design a position regulating controller by the Theorem of Partial feedback Linearization for the system and perform a simulation to testify the effectiveness of our derivation.
Mechanism and Working Principle
The spherical robot in [9] and [10] were designed with one wheel contacting with their shell, which might restrict the driving capability of the system, thus we use three omnidirectional wheels to improve our robot’s performance.
Mechanical Structure
The structure of the system is shown in Figure 1~Figure 2.
Figure 1. Principle prototype of our spherical robot. Figure 2. The schematic diagram of our spherical robot.
Working Principle
The working principle of our robot is as follows:
At the beginning, the three motors drive the omnidirectional wheels to run regulated by a given law. Simultaneously, the running wheels would synthesize a couple to propel the shell to roll via the contacting friction. And in other word, if we control the rotational velocity and direction of the wheels, we could drive the sphere shell in all direction.
After the omnidirectional wheels being driven, because the three wheels are all fixed on the inner platform, there should be a reaction couple acting on the platform by the omnidirectional wheels. With the help of the four free-running ball wheels, the reaction couple would drive the platform to rotate about the geometric center of the shell.
Moreover, if we configure the COG of the platform in different position, the support platform could work either as a rotor of high speed rotating or a pendulum of low speed swinging.
Dynamics
For facilitating our analysis, we assume that our robot had the following characteristics:
Assumption 1: the omnidirectional wheels, the shell and the support platform are all rigid body.
Assumption 2: the joints between the platform and the omnidirectional wheels are frictionless.
Assumption 3: the sphere shell rolls on a horizontal plane without slipping; the omnidirectional wheels run on the inner surface of the shell without slipping.
Additionally, we represent the support platform asB1, the shell as B2, and the omnidirectional
wheels as Bi(i3, 4,5). The coordinates of the robot are set up as follow:
Oe e e1 2 3{0}is the global coordinate system fixed on the ground;
(1) (1) (1) 1 1 2 3
O e e e {1} is the coordinate system of the inner supporting platformB1 and its origin is
the geometric center of the sphere shellB2;
(2) (2) (2) 2 1 2 3
O e e e {2}is the coordinate system of the shellB2 and its origin is the same as{1}
( ) ( ) ( ) 1 2 3
i i i
i
O e e e {i} (i3, 4,5) is the coordinate system of the omnidirectional wheelBi and the origin locates at its geometric center.
Kinetic Model
We represent ei( )j (i1, 2,3, j1, 2,3, ) as the ith base vector of coordinate{ }j , si sin( )qi ,
cos( )
i i
c q (i1, 2, ), and qi(i1, 2,3) as the ith Eular angular rate of B1. Because the sphere
shell rolls on a horizontal plane, the angular velocity ofB1 can be given as:
(1) (1) (1) (1)
1 ( 3 2 2 3 1) 1 ( 2 1 3) 2 ( 2 3 1 3 2) 3
B c q c s q s q q c c q s q
ω e e e . (1) Similarly, the angular velocity of B2 can be given as:
(2) (2) (2) (2)
2 5 1 5 6 2 ( 4 5 6) 3
B q c q q s q
ω e e e , (2) where (i4,5, 6) is the (i3)th angular rate of the sphere shell.
Considering Bi(i3, 4,5) rotate about B1, we can get the angular velocity of Bi(i3, 4,5) as:
( ) (1) ( ) 1 1 ( 4) 3
j j j
Bj B q j
ω R ω e ( j3, 4,5), (3)~(5)
where jRi( ,i j1, 2, ) denotes the rotation transform matric from { }i to { }j , and qi(i7,8,9)
denotes the angular rate of Bi(i3, 4,5), respectively.
(0) 0 (2) (0) 2 ( 2 2) 0
o B
υ R ω R , (6) where R(0) is the position vector of the shell-ground contacting point P in {0}. If we assume
(0) (0) (0)
2 1 2
o x y
υ e e (x,y) denote the longitudinal and the lateral velocity of the geometric center ofB2, respectively) and consider the first two items in (6), we would get:
5 4 4 /
q s x c y lr , q6
c x4 s y4
/ (lr c) 5
, (7)~(8)where l is the distance between the geometer center of B2 and that of Bi (i3, 4,5); ris the radius of the omnidirectional wheel.
Similarly, we investigate the velocities of the contact point between B2 and Bi(i3, 4,5), then get
5
(6 5) (6 4) (6 3) 4 (6 5 ) (4 ) 3
i i i i i j j
j
q g x g y g q g q
(i1, 2,3), (9)~(11)in (9)~(11), gj( j1, 2,3, ,18) is a function relating to qi(i1, 2,3, 4,5).
Due to the velocity of the geometric center of B2 satisfy υC(0)2 υo(0)2 , under the principle of the
relative motion we will get the velocity of Bi( ,i j1, 2, ,5) as:
(1) 1 (0) (1) (1)
1 0 2 1 1
C o B C
υ R υ ω l , υCk(1) 1R υ0 o(0)2 ωB(1)1
lok(1)1R li Ci( )k
(k 3, 4,5), (12)~(15)where lCi( )i (i1,3, 4,5) denotes the position vector in { }i from the center of B2 to that of Bi;
(1)
oi
l (i3, 4,5) is the position vector in {1} from the geometric center of B2 to that of
i
B(i3, 4,5).
According to ( )j Bi
ω ( ,i j1, 2, ,5) in (1)~(5) and ( )k Ci
υ (i1, 2, ,5;k0,1) in (12)~(15), we can calculate the system’s kinetic energy as:
5
( ) ( ) ( ) ( ) 1
(( Bij )T Bi( Bij ) ( Cik )T Bi( Cik )) / 2
i
T M
ω J ω υ υ , (16)where JBi(Mi)(i1, 2, ,5) is the inertial matric(mass matrix) of Bi(i1, 2, ,5), respectively.
By substituting (7)~(11) into T , we will get another form of the kinetic energy T .
Dynamic Model
The external force acting on our spherical robot consist of the driving torque of Bi(i3, 4,5) and
the gravity. We consider the COM of Bi(i1,3, 4,5), which can be represented as:
(1) (1) (1) 1 (3) (1) 1 (4) (1) 1 (5) 1 1 3( 3 3 3) 4( 4 4 4) 5( 5 5 5) /
C m C m o C m o C m o C mt
l l l R l l R l l R l , (17)
where mt m1m3m4m5. If we defined h 1R li C(1)[3] ( ( )[3] is the 3rd item of the vector),
we will find h is the function of qi(i2,3). And if we take the first time derivative of h, we will get:
1 2 2 3
h f q f q , (18)
in (18), fi(i1, 2) denotes the explicit function of qi (i2,3) and mj( j1,3, 4,5). With (18),
we define τg
0 g2 g3
T, in which gk m g ft k1 (k 2,3).Moreover, according to (9)~(11), we define a transform matric:
3 6
ij
g
R . Consequently, the
g
Q Q R τ , (19)
where Q
0 0 0 7 8 9
T, i(i7,8,9) is the driving torque of Bj( j3, 4,5). Considering the following form of Chaplygin equation, ,
1 1
B B
Q
d T T T
dt q q q q q q
, (20) where T is the kinetic energy and T is the kinetic energy by substituting noholonomic constraints intoT ; B , is the th coefficient of the th noholonomic constrain; q andq are the generalized coordinates of the system; and are the numbers of the independent
generalized coordinates and the noholonomic constrains; Q is the th generalized force of the system.
We can get the system’s dynamics:
( ) ( , ) ( )
D q q C q q q G q Q, (21)
in (21), D q( )6 6 , C q q( , )6 6 , and G q( )6 1 denote the inertia, centripetal-Coriolis,
and gravity terms; q and q are two kinds of generalized coordinates, which are represented as
follow:
4 7 8 9
T
x y q q q q
q and
1 2 3 4 5
T
q q q q q
q .
Equation (21) indicates our robot is an under-actuated system with six independent velocities, and the longitudinal displacement and lateral displacement (x,y) of the geometric center ofB1, the
yaw angle (q4) of B1 are under-actuated; there are three driving inputs in qi(i7,8,9), so we
could regulate control-force i(i7,8,9) to control the trajectory (x,y,q4) of the sphere shell.
Positioning Controller
Our control objective is to regulate the position of the COM of the sphere shell to a constant desired
setpoint:
4
0
T T
d d
x y q x y . Accordingly, we should define an error signal as:
1 2 3 4 5 6
4 4
T T
d d d d
e e e e e e xx xx yy yy q q
, (22) We investigate the first three items of the dynamical model (Seeing Eq.(21)):
1( ) 1( ) 1( , )
u u a a
D q q D q q F q q 0
, (23)
where qu
x y q4
T, qa
q7 q8 q9
T, and F q q1( , )3 1 is the first three items of
C q q q( , ) G q( )
, Du1( ),q Da1( )q 3 3 are a sub-matric ofD q( ). Then we will get
1
1( ) 1( , ) 1( )
a a u u
q D q F q q D q q . (24)
Substituting (24) into the last three items of the dynamical model, we will get:
1
12( ) 2( ) 1( ) 1( ) 2( ) 1( ) 1( , ) 2( , )
u a a u u a a a
D q D q D q D q q D q D q F q q F q q τ , (25)
whereF q q2( , )3 1 is the last three items of
C q q q( , ) G q( )
, andDu2( ),q Da2( )q 3 3 are the corresponding sub-matric ofD q( ). If we define qu v, we will get the input torque as:
1
12( ) 2( ) 1( ) 1( ) 2( ) 1( ) 1( , ) 2( , )
a u a a u a a
where the virtual control law are defined as:v k ep 1k ed 1, 1
1 3 5
T
e e e
e , 1
2 4 6
T
e e e
e ,
3 3
,
p d
k k , and kp diag k
p1 kp2 kp3
, kd diag k
d1 kd2 kd3
, kpi, kdi(i1, 2,3) arepositive constant control gains. With (26), we will obtain the following theorem:
Theorem: The controller (26) ensures the system:
4 4
0 ( ) ( ) ( ) ( ) ( ) ( )
T
t x t x t y t y t q t q t
limit
xd 0 yd 0 0 0
T, where
T
d d
x y is the desired position of the COM of the sphere shell. Proof:In orderto prove the Theorem, firstly, we define
1 u ud u
e q q q v, (27)
where qud
x y q4
T 0 0 0
T. According to (27), we will obtain:1 d 1 p 1
e k e k e 0, (28)
In (28), if we set suitable kd,kp, we will get: 1 1 1
0 ( ) , 0 ( ) , 0 ( )
t t t t t t
limit e 0 limit e 0 limit e 0. That is
0 ( ) , 0 ( ) 0
T
u u d d
t t t t x y
limit q 0 limit q . (29)
After substituting (29) into (23), we can obtain the zero dynamics of the robot system:
1( ) 1( , )
a a
D q q F q q 0. (30)
Considering (30) around balanced point (q10,q2 arcsin( 3 / 3), q3 arcsin( 2 / 2)), we will obtain: F q q1( , )0 , F q q2( , )0 ; g4g60, g5 (in which is a constant),
10 12
g g , g110, g16g18 g17/ 2. As a result, we can utilize (30) to show that qa 0, and
utilize (26) to show τa 0. Eventually, we can get that qa γ(where γ3 1 is a constant vector).
With (7)~(11), it is clear that q1c,q2q3q5q60 (where c is a constant). So we can get
1 2 3 4 5 6
0
( ) ( ) ( ) ( ) ( ) ( ) T 0 0 0 0 0 T
t
q t q t q t q t q t q t c
limit . (31)
Summarily, with (29) and (31), we can conclude that is the end of our proof.
Control Simulation
We preset the desired objective as:
xd yd
T
1 e0.01t 0
T( )m , q4d 0(rad). Considering the controller (26), we tuned the virtual control gains until there a better performance was achieved:1 0.022
p
k ,kp2 0.015, kp30.010, kd10.025, kd20.020, kd30.010.
The structural parameters of our system were set as: r0.06( )m ; l0.25( )m ;L10.20( )m (the
distance between the shell’s center and the COG of the platform); L20.25( )m (the distance
between omnidirectional wheel’s center and COG); m117.57(kg)
( m22.87(kg) , m30.45(kg) );
1
2
0.780 0.780 0.780 ( · )
B k
J diag gm , 2
2
0.130 0.130 0.130 ( · )
B k
J diag gm , JB3 diag
20 100 200 300 400 500 600 700 800 0 0.5 1 t/s x/ m x xd
0 100 200 300 400 500 600 700 800 -1
0 1x 10
-13 t/s y/ m y yd
0 100 200 300 400 500 600 700 800 0 0.5 1 t/s x/ m x x d
0 100 200 300 400 500 600 700 800 -1
0 1x 10
-13 t/s y/ m y y d
[image:7.595.80.513.72.163.2]a) The position coordinate ofx-axis b) The position coordinate ofy-axis
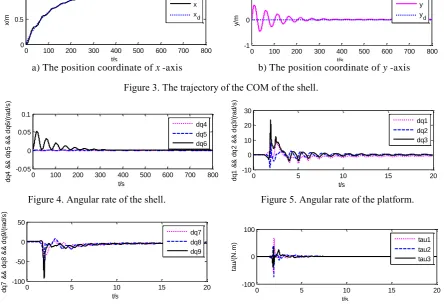
Figure 3. The trajectory of the COM of the shell.
0 100 200 300 400 500 600 700 800 -0.05 0 0.05 0.1 t/s d q 4 & & d q 5 & & d q 6 /( ra d /s ) dq4 dq5 dq6
0 5 10 15 20
-10 0 10 20 30 t/s d q 1 & & d q 2 & & d q 3 /( ra d /s ) dq1 dq2 dq3
Figure 4. Angular rate of the shell. Figure 5. Angular rate of the platform.
0 5 10 15 20
-100 -50 0 50 t/s d q 7 & & d q 8 & & d q 9 /( ra d /s ) dq7 dq8 dq9
0 5 10 15 20
-100 0 100 t/s ta u /( N .m ) tau1 tau2 tau3
Figure 6. Angular rate of the omnidirectional wheels. Figure 7. Input torques of the omnidirectional wheels.
Based on the results illustrated in Figs. 3~5, it is clear that the control laws describing in (26) exhibit certain performance to approach the desired objective.
The sphere shell stands by at the desired setpoint but the platform rotates around the vertical axis eventually. One reason for this result is that the variables of the shell (x and y) are feedback to the controller but the variables of the three driving omnidirectional wheels (qi(i7,8,9)) are not to it.
Accordingly, the three omnidirectional wheels’ rotation converging to an equal speed value. Moreover, the maximum driving torque of the three driving omnidirectional wheels is less than 80N.m, and the input angular velocity of which is less than 100rad/s.
Conclusions
The first work of this paper is that we proposed a new type of spherical robot which is driven by three omnidirectional wheels. The second work of this paper is that we developed a dynamical model by using Chaplygin equation and investigated the positioning problem by using partial linearization controller for the system. Our modelling results show that the spherical robot is an under-actuated system of six independent velocities and three control-torque inputs. With numerical simulation, we validated that the feasibility of our model and the reliability of our controller.
Our next work should focus on performing the control experiments on the principle prototype so as to further testify the characteristics of the robot system.
Acknowledgements
[image:7.595.76.521.90.396.2]References
[1] Halme A, Schonberg T, Wang Y. Motion control of a spherical mobile robot[C]. In Proceedings of the 4th International Workshop on Advanced Motion Control. 1996: 259-264.
[2] Mukherjee R, Minor M A. A simple motion planner for a spherical mobile robot[C]. Proceedings of the 1999 IEEE International Conference on Advanced Intelligent Mechatronics. 1999: 896-901.
[3] Amir H J A, Mojabi P. Introducing Glory: A novel strategy for an omnidirectional spherical rolling robot[J]. Journal of Dynamic Systems Measurement & Control, 2004, 126(3): 678-683.
[4] Li Tuan-Jie, Su Li, Zhang Yan. Design and Analysis of a Spherical Omnidirectional Rolling Robot Driven by Linear Motors[J]. Machine Design and Research, 2006, 22(4): 46-48.
[5] Alves J, Dias J. Design and control of a spherical mobile robot[J]. Proceedings of the Institution of Mechanical Engineers Part I Journal of Systems & Control Engineering, 2003, 217(6): 457-467.
[6] Zhan Q, Cai Y, Yan C. Design, analysis and experiments of an omin-directional spherical robot [C]. IEEE International Conference on Robotics and Autmation. 2011: 4921-4926.
[7] Wang Kejun. Mechanism Analysis and Research of Spherical Robot Driven by Omnidirectional Wheel [D]. Beijing Jiaotong University, 2017.
[8] Sun Hanxu, Wang Liangqing, Jia Qingxuan, Liu Daliang. Dynamic Model of the BYQ-3 Spherical Robot [J]. Journal of Mechanical Engineering, 2009, 45 (10): 8-14.
[9] Zhao Bo,Li Man-Tian,Sun Li-nin. Turning in place motion control of two pendulums driven spherical robot[J]. Journal of Harbin Institute of Technology, 2011, 43(11): 49-53.
[10]Yoon J C, Ahn S S, Lee Y J. Spherical robot with new type of two-pendulum driving mechanics [C]. IEEE International Conference on Intelligent Engineering Systems. 2011: 275-279.
[11]Otani T, Urakubo T, Maekawa S, et al. Positional and attitude control of a spherical rolling robot equipped with a gyro[C]. IEEE International Workshop on Advance Motion Control. 2006: 416-421.