2017 International Conference on Computer, Electronics and Communication Engineering (CECE 2017) ISBN: 978-1-60595-476-9
Design of Simulation Training System for the Multi-element
Observation System
Chuan-fei QIU, Wei ZHANG,
Quan-zhi ZHOU, Xiao-fang LOU,
Hui-yu NIE and Peng ZHOU
Wuhan Mechanical and Technical College, Wuhan 430075, Hubei Province, China
Keywords: Multi-element, Simulation service, Observation system, Training scene, Interconnection.
Abstract. A simulation training system for the multi-element observation system integrating several observation subsystems is constructed in this paper by applying the distributed simulation with a combination of virtual simulation and semi-physical simulation. The simulation system is designed for providing the basic services of training scene and visual synchronization for the clients of all observation equipment, developing the simulation software at the clients for simulating observation, and utilizing a general transmission platform to comprehensively realize the simulation training functions of interconnection to the information system and observation. The design of such a training system is expatiated in this paper.
Introduction
The multi-element observation system is the important subsystem of an information system and made up of UAV observation system, navigation and positioning observation car, metrological observation car and radar observation car. The system, due to very large size and high complexity, is often maintained and used by divisions and staff different from those of the information system. This arrangement is unfavorable to give full play to their efficacy, nor good for usual system training or technical inspection of the whole system. The best method to solve these problems is developing a simulation training system. On one hand, the level of training may be improved through constructing a general platform for these observation subsystems; one the other hand, the combination of virtual simulation and physical simulation can accomplish indoors the training which originally can only be completed with the cooperation of many staff and equipment and large outdoor ground, thus greatly reducing the organizational difficulty an cost of training[1]. In this paper, we utilize the computer software and hardware as well as network communication technologies to construct the simulation trainers totally identical to the radar observation car, metrological observation car, UAV observation system and navigation and positioning observation car in terms of functions, structures, information flow, operating method, failure mode and communication interfaces. These trainers can interconnect to the information system and constitute a simulation training system for the multi-element observation system.
Design of System Functions
Distributed Simulation
In virtual training scene, all subsystems belong to and carry out various observation activities on a same training scene. The observation equipment can view activities of each other on the scene, such as flight of unmanned aerial vehicle (UAV) and movement of observation cars. Therefore, the distributed simulation function is necessary to the simulation training system for visual synchronization of the whole system[2].
Meanwhile, the simulation training should have the system management function to manage the full system position access, set up the observation equipment type, training scene, point of origin of scene system and scene weather and distribute observed target.
Here the position access management can control access of all observation subsystems and the positions not permitted to access cannot log onto the system. Also, only the designated type of observation equipment can access to the system. The system has 3 typical training scenes to be used according to need. The scene weather setting means the virtual simulation system can set up the main weather conditions such as sunny, rainy, snowy and foggy and also the corresponding air temperature and pressure and wind velocity and direction.
The system origin point of the training scene is the coordinate of the basic reference point in the coordinate system of the virtual scene and every point on the scene has its only coordinate. These are the basic data provided by the training scene for the observation system. Although each point in the training scene has an only coordinate, but they cannot maintain unchanged because the training scene needs to jointly work with 2D map in the information system. The observation system acquires the coordinate of the observed target on the training scene and sends it to the information system, which can plot the observed point on the 2D map in a real-time manner. It is obvious that the coordinate system of 2D map of the information system must correspond to that in 3D geographical environment
of the virtual training scene[3]. However, 2D map in the information system covers whole of China,
and developed virtual training scene does not. This is determined by the development workload and cost. The coordinate origin point setting function on the training scene matches the coordinate system of a smaller training scene to the wider 2D map, so as to achieve joint action of virtual training scene, observation equipment and information system.
The distribution of observed target sends the observed target to observation equipment so that they can directly acquire without observing from the scene. It is a supplementary function for observation equipment’ observing of targets.
Multi-element Observation Simulation Training
The multi-element observation simulation training is a function to simulate operations and observations of all observation equipment.
The simulation training functions for UAV observation system include UAV simulation and flight control, visual aerial view of training scene in flight, positioning of UAV and real-time target observation.
The simulation training functions for navigation and positioning observation car includes simulation and driving, positioning of itself and measurement of observation points.
The simulation training functions for metrological observation car include simulation and driving, antenna rotation, metrological observation and weather data generation.
The simulation training functions for radar observation car include simulation and driving, antenna rotation, observation interface scanning, and target observation and measurement.
Interconnection with Information System
point observation, all of which belong to observation data messages and the commonly used text messages for observation equipment.
Design of System Structure
System Architecture
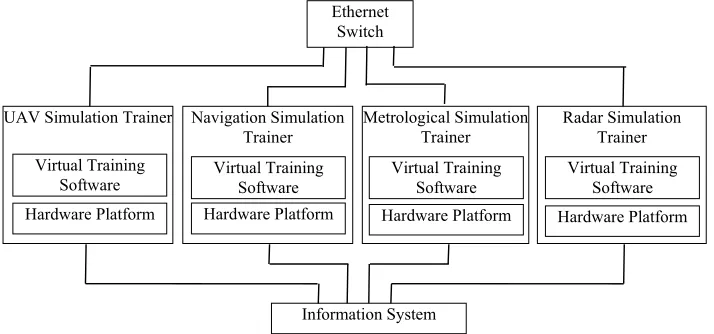
[image:3.612.130.487.210.377.2]To achieve the above functions, the architecture of the simulation training system of the multi-element observation system is shown in Figure 1. Here, various virtual training software synchronize and interact on training scenes based on Ethernet and the simulation trainers interconnect with the information system through hardware platform.
Figure 1. Architecture of distributed simulation system.
Hardware Platform
The hardware platform is the basic core of the simulation trainer. On one hand, it provides a basic operating platform for the virtual training software; on the other hand, it offers communication links for data and voice transmission. Therefore, the hardware platform comprises the communication transmission equipment besides a simulation computer, forms a general transmission platform, and is suitable for four types of simulation trainers. Its structural composition is shown in Figure 2. The general transmission platform is basically identical with the actual system, so as to ensure access of the simulation training system to the information system and achieve interconnection. The simulation computer runs the virtual training, simulates observation equipment and sends acquired observation data through the universal interface device of observation equipment or directly through the communication interface controller.
Figure 2. Structure of hardware platform. Ethernet
Switch
UAV Simulation Trainer Navigation Simulation Trainer
Metrological Simulation Trainer
Radar Simulation Trainer
Information System Virtual Training
Software Hardware Platform
Virtual Training Software Hardware Platform
Virtual Training Software Hardware Platform
Virtual Training Software Hardware Platform
Transceiver Communication Interface
Controller Universal Interface Device of
Observation Equipment Simulation Computer
To Information System Data-Voice Synchronous Transmission Terminal
General Transmission Platform
[image:3.612.160.457.566.695.2]Moreover, in addition to the two transmission methods of the general hardware platform, the simulation trainer of navigation and positioning observation car has a third transmission method, that is to say, the simulation computer transmits directly from the data-voice synchronous transmission terminal to the information system. This simulation trainer also has one more device than other three types of simulation trainers, namely the control display, which is used for displaying the located coordinate of the navigation and positioning observation car on simulation training scenes, measuring the coordinates of observation points, initial coordinate orientation, other parameter settings and control operations. The control display is developed with 80C51F020 chip and interconnects with the simulation computer by way of serial communication. It simultaneously integrates 11-digit 7-segment display and 1-digit 16-segment display for the display output. The latter mainly displays letters such as X, Y and H.
Virtual Training Software
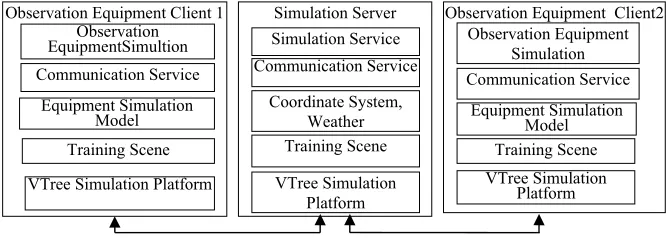
[image:4.612.141.474.320.439.2]In order to realize the functions described above, the virtual training software of simulation trainers must be distributed. In other words, there must be a group of servers for system simulation services and the virtual training software of the remaining simulation trainers are the clients to run the simulation of observation equipment and functions. The architecture is shown in Figure 3 below. The distributed simulation of the virtual simulation software in the simulation training system can be achieved by integrating the service simulation at the server and the observation equipment clients.
Figure 3. Architecture of virtual training software.
Here, the simulation server runs simulation service software. The whole system can run only one and it is the core of the distributed simulation function. The simulation service software can accomplish the core functions, such as system management, setting of visual scenes, visual synchronization of clients, coordinate system and weather simulation and presentation.
Virtual training software running on the simulation trainers of other observation equipment are clients of the virtual service software that can not only realize the multi-element observation simulation training functions, but also transmit the observation data or results from training scenes through the general transmission platform and interconnect with the information system.
The VTree simulation platform is used as the development environment and operating platform for the server and clients of virtual training software. It can achieve control and management of virtual training scenes, model the observation equipment by 3D modeling tools, integrate them to the system and complete the simulation of coordinate system and weather by functions in VTree SDK.
System Information Flow
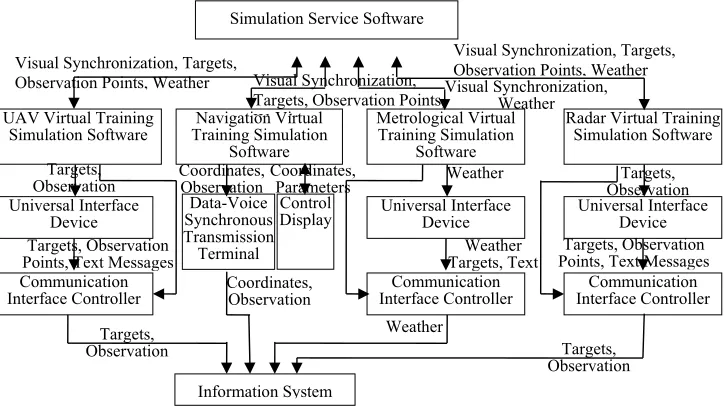
The hardware and software systems of the simulation training system for the multi-element observation system adhere to certain principles of information transmission to accomplish the simulation training functions, viz. the system information flow as shown in Figure 4.
Information in the system can be divided into three categories. The first category is information transmitted from the simulation service software to the clients, including information used for the visual synchronization and business information sent to all observation equipment, such as targets,
Simulation Server
VTree Simulation Platform Training Scene Coordinate System,
Weather Communication Service
Simulation Service Observation Equipment Client 1
VTree Simulation Platform Training Scene Equipment Simulation
Model Communication Service
Observation EquipmentSimultion
Observation Equipment Client2
VTree Simulation Platform Training Scene Equipment Simulation
Model Communication Service Observation Equipment
virtual training software to the general transmission platform, which is the business information of all observation equipment, inclusive of targets, observation points and weather information. The third category is information transmitted from the virtual training system to the information system, which, on the basis of the second category of information, adds text messages from the universal interface device.
Figure 4. System information flow chart
Conclusions
Through the design of foregoing functions, architecture, hardware system, software system and information flow, we construct a simulation training system for the multi-element observation system integrated with UAV observation system, navigation and positioning observation car, metrological observation car and radar observation car. The distributed simulation is utilized with the combination of virtual simulation and semi-physical simulation. Basic simulation services such as training scene and visual synchronization are provided to clients at observation equipment, which simulate the observation equipment work. By constructing a general transmission platform, we comprehensively achieve the simulation training functions, such as simulating interconnection of simulation training system and information system and observation work. Application of the simulation training system demonstrates success of the design in that it accomplishes the expected target and results.
References
[1] Andreas Tolk, Engineering Principles of Combat Modeling and Distributed Simulation, National Defense Industry Press, Beijing, 2016, pp. 26-28.
[2] Information on http://www.ck365.cn/wap/index.php?itemid=54398&mid=23
[3] Wang Ming, Vega Prime – The Developing Technology of Scene Simulation, National Defense Industry Press, Beijing, 2014, pp. 79-81.
UAV Virtual Training
Simulation Software Training Simulation Navigation Virtual Software
Metrological Virtual Training Simulation
Software
Radar Virtual Training Simulation Software
Universal Interface Device
Communication Interface Controller
Data-Voice Synchronous Transmission Terminal
Universal Interface Device
Communication Interface Controller
Universal Interface Device
Communication Interface Controller
Information System Visual Synchronization, Targets,
Observation Points, Weather
Visual Synchronization, Targets, Observation Points, Weather Visual Synchronization,
Targets, Observation Points,
W h
Visual Synchronization, Weather
Targets,
Observation Targets,
Observation Coordinates,
Observation
Weather Targets,
Observation Coordinates, Observation Weather Observation Targets,
Targets, Observation Points, Text Messages Weather
Targets, Text Control
Display Coordinates,
Parameters
Targets, Observation Points, Text Messages