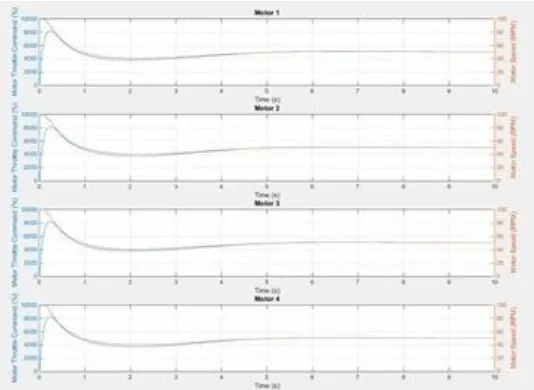
Modeling and simulation of X quadcopter control
Full text
Figure
Related documents
Zaštita voda općenito u Republici Hrvatskoj definirana je Zakonom o vodama (NN 153/2009) na kojega se nastavlja niz pravilnika koji detaljnije opisuju pojedine aspekte zaštite,
And that's a real feeling and experience and this, I think this was a great way to approach, you know, how do you build community, how do you work in South Carolina, how do you
3.14 MEASUREMENT OF THE LEVEL OF HARMONICS (THD) AND OF THE FREQUENCY OF THE FUNDAMENTAL (NETWORK) The device measures the total harmonic distortion with respect to the fundamental
Abstract: 7KH VWXG\ DLPV WR LQYHVWLJDWH KRZ ,QGRQHVLDQ DXWKRUV ZULWH WKHLU (QJOLVK DQG ,QGRQHVLDQ UHVHDUFK DUWLFOH 5$ GLVFXVVLRQ VHFWLRQV 7KHUH ZHUH ,QGRQHVLDQ DXWKRUV ZKR
Furthermore, while symbolic execution systems often avoid reasoning precisely about symbolic memory accesses (e.g., access- ing a symbolic offset in an array), C OMMUTER ’s test
FILTERS AND MAILING LIST BASICS Rev. All rights reserved. DataTree makes no express or implied warranty respecting the information presented and assumes no responsibility for
The design of the robot controller is based on STM32F103VET6 as the main control chip, the car through the ultrasonic ranging to get the distance of the obstacle
