Munich Personal RePEc Archive
The effect of learning on climate policy
under fat-tailed uncertainty
Hwang, In Chang and Reynes, Frederic and Tol, Richard
13 February 2014
Online at
https://mpra.ub.uni-muenchen.de/53681/
1
The Effect of Learning on Climate Policy under Fat-tailed Uncertainty
In Chang Hwanga,*,Frédéric Reynèsa,e,f and Richard S.J. Tolb,a,c d,g
a
Institute for Environmental Studies, Vrije Universiteit, De Boelelaan 1087, 1081 HV,
Amsterdam, The Netherlands
b
Department of Economics, University of Sussex, Jubilee 281, Falmer, Brighton, BN1 9SL,
United Kingdom
c
Department of Spatial Economics, Vrije Universiteit, De Boelelaan 1105, 1081 HV,
Amsterdam, The Netherlands
d
Tinbergen Institute, Gustav Mahlerplein 117, 1082 MS, Amsterdam, The Netherlands
eOFCE Sciences Po’s Economic Research Centre,
rue Saint Guillaume, 75337, Paris,
France
f
TNO - Netherlands Organisation for Applied Scientific Research, Van Mourik
Broekmanweg 6, 2600 AA, Delft, The Netherlands
g
CESifo, Munich, Germany
* Corresponding author. VU University Amsterdam, Institute for Environmental Studies, De
Boelelaan 1087, Amsterdam, The Netherlands, 1081 HV (Tel.: +31 6 1602 5459, Fax: + 31
(0) 20 59 89553, E-mail address: [email protected])
Abstract
We construct an endogenous (Bayesian) learning model with fat-tailed uncertainty on the
equilibrium climate sensitivity and solve the model with stochastic dynamic programming. In
our model a decision maker updates her belief on the climate sensitivity through temperature
observations each time period and takes a course of action (carbon reductions) based on her
belief. We find that the uncertainty is partially resolved over time, although the rate of
2
efforts to reduce carbon emissions relative to the no-learning case. The larger the tail effect,
the larger the counteracting learning effect. Learning at least partly offsets the tail-effect of
deep uncertainty. This is intuitive in that the decision maker fully utilizes the information
revealed to reduce uncertainty, and thus she can make a decision contingent on the updated
information. In addition, with various scenarios, we find that learning enables the economic
agent to have less regrets for her past actions after the true value of the uncertain variable
turns out to be different from the initial best guess. Furthermore the optimal decisions in the
learning case are less sensitive to the true value of the uncertain variable than the decisions in
the uncertainty case. The reason is that learning lets uncertainty converge to the true value of
the state in the sense that the variance approaches 0 as information accumulates.
Key words
Climate policy; deep uncertainty; Bayesian learning; integrated assessment; stochastic
dynamic programming
JEL Classification
Q54; C61; Q58; H23
1 Introduction
“The acquisition of information has value, which it would not have in a world of certainty.”
(Arrow, 1957: 524) Following this notion, economists have investigated the effects of
learning on policy and welfare, including the irreversibility effect, the value of information,
the optimal timing of action, the rate of learning, the direction of learning, and the cost of
learning.1 The answers to these questions, however, are not straightforward especially when
1
Some earlier papers, not exhaustive, for these issues on climate change are the followings: the irreversibility
3
climate policy is concerned. They depend not only on the ways that climate feedbacks,
preferences, and economic impacts are considered, but also on the ways that uncertainty and
learning are introduced.
The general framework for the problem of decision making under uncertainty and learning
about climate change is as follows (Pindyck, 2002). In an economy where the impacts of
climate change are uncertain with a possibility of learning, a decision maker encounters
conflicting risks: a risk that stringent emissions control today turns out to be unnecessary ex
post, and a risk that much stronger efforts are required in the future since climate change is
catastrophic. If there is no irreversibility to be considered, the problem becomes trivial since
the decision maker can revise her actions as and when required. However, both the
investment in emissions abatement and the accumulation of greenhouse gases (GHGs) are, at
least partially, irreversible.
In the presence of irreversibility, the decision maker generally favors an option that
preserves flexibility (Arrow and Fisher, 1974; Henry, 1974). As far as climate policy is
concerned, however, since there are two kinds of counteracting irreversibility, the problem
becomes complicated. The relative magnitude of irreversibility determines the direction and
the magnitude of the effect of learning on climate policy: the irreversibility related to the
carbon accumulation strengthens abatement efforts, whereas the irreversibility related to the
capital investment on emissions abatement lowers abatement efforts.
Popp, 1997); the optimal timing of action (Pindyck, 2002; Guillerminet and Tol, 2008); the rate of learning
(Kolstad, 1996b; Kelly and Kolstad, 1999; Leach, 2007; Webster et al., 2008); and the direction of learning
4
Alternatively, we can think of the problem as experimentation with carbon emissions in the
framework of learning by doing (Arrow, 1962).2 The decision maker confronted with
uncertainty and a possibility of learning about climate change can be seen as a Bayesian
statistician who experiments with a level of carbon emissions to gain information about
uncertainty. The more GHG emissions (in turn, the higher warming) are more informative in
the sense that it provides more precise information about uncertain parameters such as the
equilibrium climate sensitivity.3 However, the acquisition of information comes at an
(implicit) cost: higher emissions induce consumption losses (via increased temperature). As a
result, the decision maker should choose an optimal level of emissions by comparing gains
and losses from the acquisition of information.
In the literature, the possibility of learning generally affects the near-term policy towards
higher emissions relative to the case where uncertainty is not reduced (for the summary of the
literature see Ingham et al., 2007). One of the reasons is that irreversibility constraints such as
the non-negativity of carbon emissions rarely bite in climate change models (Ulph and Ulph,
1997).4 In addition, even if they do bind, the effect of the irreversible accumulation of the
2
Learning in the current paper is ‘passive’ in a sense that the decision maker does not directly affect the rate of
learning. Usually in the ‘active’ learning literature (also known as dual control, probing, or optimal experimentation), control variables play a direct role in reducing uncertainty (e.g. Prescott, 1972; Grossman et
al., 1977). See Kendrick (2005) for more on this issue.
3
The equilibrium climate sensitivity is a measure of the responsiveness of the climate system to radiative
forcing. It denotes how much atmospheric temperature changes when carbon dioxide concentration is doubled.
4
Regarding this, Webster (2002) argues that if the non-negativity matters, the effect of the irreversible
5
carbon stocks is smaller than the effect of irreversible capital investment on emissions
abatement (Kolstad, 1996a; 1996b).5
If we think of the results in the framework of learning by doing, these results imply that
more carbon emissions are more informative in the sense that the decision maker can attain
more utility from her experimentation (Blackwell and Neyman, 1951).
Fat-tailed (or deep, structural) uncertainty may lead to different results since the marginal
damage costs of climate change become far larger, if not arbitrarily large, under deep
uncertainty (Weitzman, 2009).6 Consequently, this may change climate policy in favor of
stringent efforts to reduce GHG emissions compared to the no learning case. However,
learning may of course reveal thin-tailed uncertainty about objective function, weakening the
case for emissions control.7 Put differently, learning may reduce the optimal level of
emissions control even when we account for deep uncertainty.
A dynamic model on climate change incorporating deep uncertainty and learning is
developed in this paper.8 Learning in the model is endogenous: the decision maker updates
5
There are some papers that find the case where the irreversibility constraints (i.e. nonnegative emissions) bind
with various methods, including the alternative parameterization of some critical equations (Ulph and Ulph,
1997; Webster, 2002), the introduction of catastrophic events (Keller et al., 2004), and the presence of stringent
climate targets (Webster et al., 2008).
6
This paper retains the following definition of fat tail: “a PDF [probability density function] has a fat tail when its moment generating function is infinite ‐ that is, the tail probability approaches 0 more slowly than
exponentially” (Weitzman, 2009: 2).
7
Notice that the posterior distribution of the climate sensitivity always has fat tails in the learning model of this
paper (see Section 2). However, social welfare may have thin tails as the variance parameter of the climate
sensitivity approaches zero over time.
8
6
her belief about an uncertain parameter, expressed in a probability distribution, by the
acquisition of information. This approach on endogenous learning is not new in the
economics of climate change. For instance, Kelly and Kolstad (1999) introduce uncertainty
about a climate parameter (linearly related to the climate sensitivity) into the DICE model
(Nordhaus, 1994), and then investigate the expected learning time. Leach (2007) follows a
similar model and approach, but introduces an additional uncertainty on climate parameters.
Webster et al. (2008) investigate the effect of learning on the near term policy using the
DICE model with a discrete four-valued climate sensitivity distribution and exogenous
learning. In the second part of their paper, they investigate the time needed to reduce
uncertainty about the climate sensitivity and the rate of heat uptake by using a simplified
climate model. They incorporate fat-tailed uncertainty and Bayesian learning into the model
but their model does not analyze policy.
In the current paper another perspective is added compared to the literature. That is, where
previous papers mostly studied thin-tailed distributions, we here focus on fat-tailed ones.
Kelly and Tan (2013), although not published yet, do a similar analysis as ours.9 They
incorporate fat-tailed uncertainty into a model of climate and the economy and consider the
effect of learning on policy. They find that with learning the decision maker can reject the
maker in our model can and do postulate probability distributions of uncertain variables, ex ante. Although the
distinction between risk and uncertainty is important, we here use the terms interchangeably as the other climate
change literature usually do. The decision making under ambiguity requires a different framework (e.g. Gilboa
and Schmeidler, 1989) and thus it is beyond the scope of the current paper. See Millner et al. (2013) for an
application of ambiguity theory into an integrated assessment model (IAM).
9
The difference between ours and Kelly and Tan (2013) was more transparent at the time when the first draft of
the current paper was made available (Sussex Working Paper No. 53-2012 with the same title). The previous
7
fat-tailed portion of the distribution in a decade or so, and that the optimal carbon tax in the
learning model decreases by about 40-50% compared to the no-learning case.
There are some differences between Kelly and Tan (2013) and our analysis. First, the
model, calibrations, the definition of learning, and solution methods are different. For
instance, Kelly and Tan apply the model of Bartz and Kelly (2008), the damage function of
Weitzman (2009), a well-mixed single-layered climate model, the definition of learning by
Kelly and Kolstad (1999), and spline approximations, whereas we use the original DICE
model (Nordhaus, 2008), the damage function of Nordhaus (2008), multi-layer climate
system, the definition of learning by Webster et al. (2008), and logarithmic approximations.
These differences may induce a different rate of learning and correspondingly find a different
magnitude of the learning effect.10
Second, the main focus is different between the two papers. The current paper explicitly
deals with the benefits of learning in terms of the expected social costs of climate change,
whereas Kelly and Tan focus on the rate of learning and the effect of diminishing fat tails.
The other benefits of learning are also discussed in the current paper.
Third, on the results side, the optimal policy converges to the case of perfect information in
about two decades in Kelly and Tan (2013); our model converges more slowly. The main
reason is that the rate of learning (measured as the reduction of variance) is much faster in
their model than in ours.11 Their rate of learning is also far faster than the earlier literature
10
For instance, the multi-layered climate model may alter the rate of learning compared to the single-layered
model. This is because the other layers such as the deep ocean serve as a heat reservoir.
11
Their results are largely dependent on the (presumably misused) parameterizations for their climate model.
The time is annual in their full model, but the parameter values they used for temperature evolution is the one
8
including Kelly and Kolstad (1999), Leach (2007), and Webster et al. (2008). In addition,
such fast learning is not consistent with the past experiences in climate science (Allen et al.,
2006). Since there is only one policy lever (i.e. GHG emissions) to increase the rate of
learning in such a passive learning model (see footnote 2), the rate of learning is not generally
faster in a model of fat-tailed uncertainty than in a model of thin-tailed uncertainty (see
Section 6). Note that 1) carbon emissions are less under fat-tailed uncertainty than under
thin-tailed uncertainty, and that 2) more warming leads to more precise information.
This paper proceeds as follows. Section 2 describes the model and computational methods.
The DICE model (Nordhaus, 2008) is revised to represent (deep) uncertainty and endogenous
learning about the equilibrium climate sensitivity through the framework of feedback analysis
(Hansen et al, 1984; Roe and Baker, 2007). The model is solved with the method of dynamic
programming. Section 3 presents the posterior distribution of the climate sensitivity and
compares the rates of learning. Section 4 illustrates the effect of learning on climate policy.
The case where the initial belief on the climate sensitivity is unbiased in the sense that the
true value of the climate sensitivity turns out to be the same as the expected value of the
initial belief of the decision maker is investigated. Then the results are compared with the
other cases where the initial belief turns out to be biased. Section 5 investigates the cost of
no-learning. Section 6 presents a sensitivity analysis with the damage function of Weitzman
(2012). Section 7 concludes.
values of the DICE model, of which time is decadal. See Marten (2011) and Cai et al. (2012a) for calibrations
for the climate parameters of DICE with different time horizon. Figure 6 and Table 1 in Kelly and Tan (2013)
imply that learning in their model is far faster than the one in this paper (see Section 3 of this paper for a
literature review on the rate of learning). Applying the same parameterizations (i.e., =0.22 and =0.05) with
Kelly and Tan (2013) to our model, however, fast learning as in Figure 6 of their paper can be obtained (results
9
2 The Model and Methods
2.1 The Revised DICE Model
Uncertainty and learning are introduced in the DICE model (more precisely, the DICE
2007 optimal policy version). There are several differences in the model of this paper with
the original DICE model. First, the current model incorporates (deep) uncertainty. The key
uncertain parameter in the model is the equilibrium climate sensitivity. Second, the
probability density function (PDF) of the climate sensitivity changes over time through
temperature observations. As a result, the parameters of the climate-sensitivity distribution
become endogenous state variables. Third, stochastic temperature shocks are introduced for
Bayesian updating on the distribution parameters.12 Fourth, time horizon and a solution
method are different. More precisely, the time period in our model is annual and thus some
parameter values are adjusted. A solution method suitable for an (infinite horizon)
endogenous learning model is applied in this paper. There is no upper bound of accumulated
carbon emissions in the current model and backstop technology is not considered in the paper.
Finally, the savings’ rate is fixed at constant in our model for simplicity. These assumptions
do not affect the main results of the current paper qualitatively.13 Learning is costless in the
12 Temperature shocks reflect observational errors, model’s biases to match observations, and the natural
variability (Webster et al., 2008).
13
The savings rate (defined as the gross investment divided by the net production) changes in the range of
0.240 and 0.247 for the first 600 years in the DICE-CJL model (Cai et al., 2012a), which is a modified version
of DICE with an annual time step. Fixing the savings’ rate at a reasonable value does not have much impact on the results of the model. For instance, if the savings’ rate is fixed at 0.245 all variables including the optimal carbon tax deviate only less than 3% from the original results. This holds even if the true value of the climate
10
model, for simplicity. Unless otherwise noted, the parameter values and the initial values for
the state variables (in the year 2005) are the same as in DICE 2007.
The decision maker of the model chooses the rate of emissions control in each time period
so as to maximize social welfare defined as in Equation (1) – the expected discounted sum of
utility of per capita consumption. A unit increase in GHG emissions induces future climate
change and thus it reduces expected utility, due to the loss of future consumption as a
consequence of higher warming. Emissions control comes at a cost and the cost is increasing
and convex in the emissions control rate. Gross output net of damage costs and abatement
costs is allocated into investment and consumption.
∑
∑ ⁄
(1)
subject to
[
] (2)
(3)
where is the expectation operator given information at point in time t, is the
instantaneous utility function of per capita consumption, is consumption, is labor force
(exogenous), is the total factor productivity (exogenous), (= ) is the abatement
costs function, (=1/( )) is the damage function, (= ) is the
production function, is the emissions control rate, (= ) is gross investment, (=0.245)
11
consumption, is the discount factor, (=0.015) is the pure rate of time
preference, (=0.3) is the elasticity of output with respect to capital, (=0.1) is the
depreciation rate of the capital stock, and (=0), (=0.0028388), (=2), (=0.0561), and
(=2.887) are parameters.
The carbon-cycle model is composed of three layers for GHG: the atmosphere, the upper
ocean, and the lower ocean. The rate of GHG mixing between layers is captured by ,
where iand j denote each layer.
(4)
(5)
(6)
where , , are the carbon stocks in the atmosphere, the upper ocean, the lower
ocean, respectively, is the emission-output ratio (exogenous), is GHG emissions
from non-energy sectors (exogenous), and (=0.9810712), (=0.0189288), (=0.0097213),
(=0.005), (=0.0003119), and (=0.9996881) are climate parameters adjusted for annual time
step following Cai et al. (2012a).
In a general integrated assessment model (IAM) the temperature response is usually
modeled as having one or two boxes, and those can be derived from the energy balance
model of Baker and Roe (2009). The mixed layer exchanges heat with the atmosphere and the
12
simplification (the mixed layer and the deep ocean) and a discrete time horizon, the energy
balance model becomes the temperature response model of DICE (Marten, 2011):
{
} (7)
{ } (8)
where is radiative forcing from non-CO2 gases (exogenous), (=596.4GtC) is the
pre-industrial carbon stock in the atmosphere, is the equilibrium climate sensitivity, (=0.022),
(=0.3), (=0.005), and (=3.8) are climate parameters adjusted for annual time step following
Cai et al. (2012a), and , where =1.2°C/2xCO2 is the reference climate sensitivity
(absent of climate feedbacks: black-body planet).
2.2 Bayesian Learning
The climate sensitivity has a highly skewed distribution to the upper end (see Figure 1) in the
model with parameters ̅ and √ as follows.
(
√ )
{ [
( ̅ ) ]
}
(9)
The above equation is derived in the framework of feedback analysis (Roe and Baker,
2007) using the fact that the climate sensitivity is related to the total feedback factors as in
13
⁄ (10)
where is the total feedback factors which measures aggregate impacts of physical factors
such as water vapor and cloud on radiative forcing in a way to magnifying the response of the
climate system (Hansen et al., 1984). is assumed to be normally distributed with mean ̅
and variance and the initial value for ̅ and are 0.65 and 0.132, respectively,
following Roe and Baker (2007).
Substituting Equation (10) into Equation (7) and adding stochastic temperature shocks lead:
(11)
where is stochastic temperature shocks and , , ,
, and are adjusted parameters.
The temperature shocks are assumed to have a normal distribution with mean 0 and a
constant variance (=0.12) following Tol and de Vos (1998). Although the shocks are
independent, Equation (11) implies a first-order autoregressive model (see Kelly and Kolstad,
1999). In this representation, the decision maker expects that air temperature in the next
period is determined by the following equation: .
However, the actual realization of the temperature is determined not just by the above
equation, but also by the true value of the total feedback factors (which is not known to the
decision maker ex ante with certainty: parametric uncertainty) and by the random realization
14
stochasticity). Put differently, there are deviations between the decision maker’s expectation
and her observations, which lead to the modification of the prior belief.
The decision maker in the model obtains the posterior distribution of the total feedback
factors by the Bayes Rule as follows.
| | (12)
where is the prior belief on the total feedback factors, | is the likelihood
function of the observations given , and | is the posterior belief.
An expert prior for the initial distribution of the total feedback factors is applied in this
paper. More specifically, the normal distribution of Roe and Baker (2007) is used. The
normal prior has some advantages over the other priors such a uniform prior. First, the
posterior calculated from the normal prior is also normally distributed, provided that the
likelihood function is normal. In this case, it is easy to calculate the posterior just by
investigating the posterior mean and the variance (Cyert and DeGroot, 1974). Second, as
Annan and Hargreaves (2011) point out, uniform priors usually used in a Bayesian analysis
assign too much probability to extreme parameter values (say, the climate sensitivity of
10°C/2xCO2) beyond the current scientific knowledge. This assignment may dominate the
calculation of expected damage costs.
The resulting posterior has the normal distribution with mean ̅̅̅̅̅ and variance as in
Equation (13) and (14). These equations are derived from a direct application of the Bayes
Rule with the above mentioned assumptions on the likelihood function and the prior. Note
15
numerically unsolvable since equilibrium cannot be reached (Baker and Roe, 2009). In order
to deal with this issue this paper uses the (unbounded) normal distribution as a prior for
Bayesian updating and then sets an upper bound on the derived posterior distribution for
simulations ( ≤0.999). Note that this upper bound corresponds to the climate sensitivity of
1,200°C/2xCO2. Higher upper bounds than this do not affect the main points of this paper
(results not shown). In the subsequent period, the decision maker uses the previously
calculated posterior as the prior (unbounded normal distribution) for next updating. In this
way, the decision maker updates her belief every time-period.
̅̅̅̅̅ ̅ ⁄ ⁄
(13)
⁄ (14)
Equations (13-14) say that the variance of the total feedback factors decreases over time.
Put differently, the acquisition of information in the model always increases the precision of
the decision maker’s belief. As the variance gets smaller, the mean of the total feedback
factorsapproaches to the (pre-specified) true value, on average. That is, there is no ‘negative’
learning (Oppenheimer et al., 2008) in this model. Although the variance parameter becomes
smaller as temperature observations accumulate, however, the climate sensitivity has still a
16
2.3 Computational Methods
Two kinds of methods have been used for solving a learning model numerically in the
literature: stochastic optimization and dynamic programming. The first one is to consider
possible states of the world on parameter values of interest with corresponding probability
distributions, and solve for the optimal time path of policy variables that maximize the
expected value of the objective function over a finite time horizon (e.g. Kolstad, 1996a;
Webster et al., 2008). The second one is to formulate the problem recursively through a
functional equation and then solve the problem over an infinite time horizon (e.g. Kelly and
Kolstad, 1999; Leach, 2007). The current paper takes the second approach: dynamic
programming.14
General approach of this paper is illustrated below. The solution methods in detail
including accuracy tests are given in Appendix A. Equation (1) is reformulated using the
Bellman equation:
(15)
where is the value function starting from period t, is the vector of control
variables ( ), is the vector of state variables ( , , , , , ̅, v, L, A, ), and
is the vector of uncertain variables (f, ).
Then the value function is approximated with a flexible basis function having a specific
analytic form such as polynomials or logarithmic function. Following this way, the
14
See Bellman and Dreyfus (1962), Stokey and Lucas (1989), Rust (1996), Judd (1998), and Miranda and
17
maximization problem is changed into the regression problem of finding that minimizes
the approximation errors.
∑ (16)
where is the basis function, is the vector of coefficients for the basis function.
The algorithm for finding is summarized as follows. First, choose an initial guess .
Second, simulate a time series satisfying the first order conditions for Equation (15) (see
Appendix A), the initial conditions for the state variables, and the transitional equations (3-8)
and (13-14). Note that if is chosen, the control variables are calculated from the first
order conditions, the initial conditions for the state variables, and the transitional equations.
In this way, the resulting time series depend on the initial guess . Third, calculate the left
hand side (LHS) and the right hand side (RHS) of Equation (15) using Equation (16), the
utility function, and the simulated time series of variables. For the calculation of the
expectation, the Gauss-Hermite quadrature method is applied in this paper (Judd, 1998).
Fourth, compare the calculated values for LHS and RHS of Equation (15) and stop the
iteration if the approximation errors are smaller than the pre-specified tolerance level (the
stopping rule: see Appendix A). Fifth, if the fourth step does not meet the stopping rule,
estimate ̂ that minimizes the approximation errors. Update following the pre-specified
updating rule (see Appendix A). This is a new guess . Then go back to the second step
with the new guess and follow the next steps until the iteration meets the stopping rule.
The algorithm, which is proposed by Maliar and Maliar (2005), effectively reduces the
18
conditions (Judd et al., 2011). By the fixed point theorem, the solution is the unique
solution for the optimization problem (Stokey and Lucas, 1989).
Most literature solving an integrated assessment model of the economy and climate change
with dynamic programming take a similar approach to the methods above. The problem is
formulated in a recursive way and the value function is approximated to a flexible basis
function.15 The fixed-point theorem is applied to search for solutions. The main difference
between papers is the approximation method applied. For instance, Kelly and Kolstad (1999)
and Leach (2007) use neural networks, Kelly and Tan (2013) apply spline approximation, and
Cai et al. (2012b) and Lemoine and Traeger (2014) apply Chebyshev polynomials. Another
difference is the method for dealing with time dependence. For instance, Kelly and Kolstad
(1999), Leach (2007), and Lemoine and Traeger (2014) add the time variable as an argument
for the value function. Cai et al. (2012b) let the coefficient of the basis function vary each
time period. Kelly and Tan (2013) make the model time independent. This paper adds the
time dependent exogenous variables as arguments for the value function. In addition, the
solution method of this paper differs from the literature in that it searches for solutions on an
ergodic set, whereas the other papers generally search for solutions on a carefully designed
grid.
15
Hennlock (2009) also approximates the value function to an analytical basis function, although he solves his
19
3 Learning about the Climate Sensitivity Distribution
The climate sensitivity distribution is the decision maker’s belief on the climate sensitivity
and ̅ and are the parameters of the climate sensitivity distribution.16 According to the
updating procedure presented in the previous section and Appendix A, the belief of the
decision maker on the parameter values of the climate sensitivity distribution changes as
temperature observations accumulate.
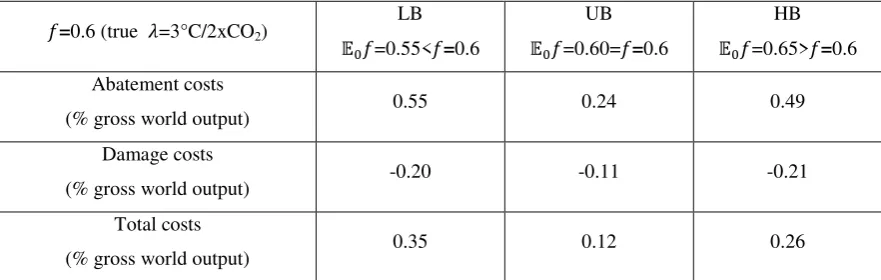
Figure 1 shows the evolution of the belief over time. For Figure 1 and subsequent figures,
=0.65, =0.13 following Roe and Baker (2007) and the true value of is 0.6, of which
corresponds to =3°C/2xCO2. 17
The main implications of this paper do not change
qualitatively for the other values of (results not shown). Considering random realizations
of temperature shocks, we present the average of 1,000 Monte Carlo simulations throughout
the paper for the learning case.
As argued in the previous section, the mean approaches the true value of the total feedback
factors and the variance decreases as the temperature observations accumulate over time (see
the left panel). Since the mean of the climate sensitivitychanges, the coefficient of variation
of the climate sensitivity, the (simulated) variance divided by the (simulated) mean, is
16
Note that is the standard deviation not of the climate sensitivity, but of the total feedback factors. The
standard deviation of the climate sensitivity does not exist, by definition, since it has fat tails.
17
̅ and are the parameters of the climate sensitivity distribution. Note that is the standard deviation not
of the climate sensitivity, but of the total feedback factors. The standard deviation of the climate sensitivity does
not exist, by definition, since it has fat tails. The climate sensitivity distribution is the decision maker’s belief on the climate sensitivity. Our model assumes that the current knowledge of the decision maker on the climate
sensitivity is represented by the distribution with the parameters ̅=0.65 (or 0.60 or 0.55 according to scenarios)
and =0.13. The main implications of this paper do not change qualitatively with the other values of . An
20
considered as a measure of uncertainty in this paper. Learning is defined in this paper as a
decrease in the coefficient of variation similar to Webster et al. (2008). In this definition, the
decision maker learns every time period as seen from the top panels. However learning is
relatively slow. For instance, it takes 55 (230) years for the coefficient of variation to be
reduced to a half (a tenth) level. Time needed to reduce uncertainty is, of course, sensitive to
the specification of the model, especially to the assumptions on the prior and the likelihood
function. However, notice that the results presented in this paper are based on the current
scientific knowledge about the climate sensitivity distribution following Roe and Baker
(2007).
The bottom panels show the corresponding climate sensitivity distributions. The density on
the tails becomes much smaller as time goes by, and thus the precision (defined as the
reciprocal of variance) of the belief increases.
Webster et al. (2008) define learning similar to this paper and the learning time for 50%
reduction in the coefficient of variation of the climate sensitivity is about 60~70 years (when
the distribution of Forest et al. (2002) is used as a prior, see Figure 10 of their paper), which
is largely consistent with the results of this paper. Kelly and Kolstad (1999), Leach (2007),
and Kelly and Tan (2013) define learning as the estimated mean approaching its true value.
That is, learning takes place in their models when the mean of the uncertain variable becomes
statistically close to the pre-specified true value (e.g., the significance level of 0.05).
According to their criterion, the expected learning times are about 146 years (when the true
climate sensitivity is 2.8°C/2xCO2) in Kelly and Kolstad (1999) and the order of hundreds (or
thousands) of years in Leach (2007). The difference between the two papers originates from
21
about 64 years (when the true climate sensitivity is 2.76°C/2xCO2) in Kelly and Tan (2013),
which is far faster than the one in Kelly and Kolstad (1999) and Leach (2007).
Since the definition of learning is different, it is not easy to compare the results of Kelly
and Kolstad (1999), Leach (2007), Kelly and Tan (2013), and the result of this paper directly.
However, we can get some insights from Figures 4, 6 and Table 5 of Kelly and Tan (2013),
Figure 2 of Kelly and Kolstad (1999), and Figure 1 and Table 1 of this paper. If the reduction
of standard deviation is applied as a measure of learning for comparison, Figures 4, 6, 18 and
Table 5 of Kelly and Tan (2013) show that learning is far faster in their model than the model
of this paper. As noted in Section 1 this is primarily because their parameterizations on the
climate parameters are far different from those of this paper and the literature (by a factor of
10).18 Figure 2 of Kelly and Kolstad (1999) implies that there is no much difference in the
learning time between Kelly and Kolstad (1999) and the current paper.
Table 1 illustrates the (upper) tail probability of the climate sensitivity distributions. As
expected, the tail probability decreases as learning takes place. One of the important
questions in climate science is whether or not we can put constraints (or an upper bound) on
the climate sensitivity (Knutti et al., 2002). If we use a specific percentile to impose an upper
bound on the climate sensitivity, the table below gives useful information. For instance, based
on 95th percentile, it takes about 50 years to set an upper bound on climate sensitivity at
6°C/2xCO2.
18
There are also many differences in the model and parameterizations between Kelly and Tan (2013) and the
current paper. For instance, whereas Kelly and Tan (2013) apply the abatement cost function of Bartz and Kelly
(2008), the damage function of Weitzman (2009), a one-box temperature response model, higher consumption
and utility discounting (e.g., the pure rate of time preference is 0.05), this paper applies the abatement cost
function of Nordhaus (2008), without considering backstop technology, the damage function of DICE and
Weitzman (2012), the two-box temperature response model, and lower consumption and utility discounting than
22
The rate of learning is as important as the magnitude of learning since slow learning may
lead to our incapability to take appropriate actions on time because of the possibility of
irreversible changes. Especially when we consider the possibility of (discontinuous) climate
catastrophes such as a collapse of the West-Antarctic Ice Sheet (Guillerminet and Tol, 2008)
and the thermohaline circulation collapse (Keller et al., 2004), we should put more
importance on the rate of learning. See also Lemoine and Traeger (2014) for the effects of
tipping points on climate policy. Furthermore, fast learning enables more efficient allocation
of resources.
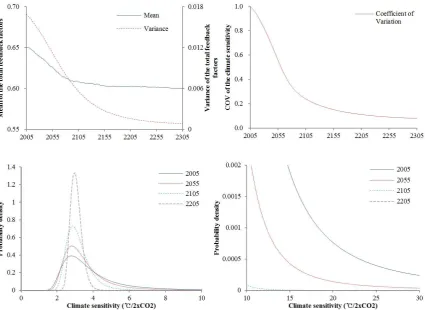
Some sensitivity analyses are presented in Figure 2. Since does not change according
to the cases, the variance parameter of the total feedback factors are compared. The higher
(respectively, lower) is the true value of the climate sensitivity, the faster (resp., slower) is the
learning. This is intuitive in that the higher climate sensitivity implies the higher temperature
increases, resulting in the lower variance parameter (see Equation 14). In a similar fashion,
the rate of learning increases in emissions (results not shown) as shown in Leach (2007).19 A
unit increase (respectively, decrease) in emissions from the optimal path reduces (resp.,
increases) the uncertainty. The more deviations in emissions are the higher deviations in the
rate of learning are. The right panel illustrates the sensitivity of the rate of learning on the
initial level of uncertainty. The variance parameter converges to a low level during the late
22nd century. In other words, differences in the initial level of uncertainty become irrelevant
after 150 years or so. This implies that the rate of learning is higher in a more uncertain case.
Nevertheless, there are substantial differences in uncertainty in the near future.
19
The model is simulated with an additional unit of exogenous carbon emissions. For this simulation, the
solution b of the reference case ( =0.6, =0.60, =0.13) is used as the initial guess. The other specifications
23
The rate of learning is decreasing in the standard deviation of temperature shocks. This is
because as the noise increases observations become less informative (see the bottom left
panel and Equation (14)).
Compared to the reference case where the damage function of Nordhaus (2008) is applied,
the rate of learning is lower if the damage function of Weitzman (2012), Equation (19) in
Section 6, is applied (see the bottom right panel). This is because a unit increase in GHG
emissions is expected to be less beneficial than the reference case in terms of social welfare.
The expected net gains (the difference between the expected gains from reducing uncertainty
and the expected loses from temperature increases) are lower for the highly reactive damage
function than for the less reactive damage function.
4 The Effect of Learning on Climate Policy
The effect of learning on climate policy is investigated in this section. To this end, the
following three cases are compared: (1) Deterministic, (2) Uncertainty (no learning), and (3)
Learning. The deterministic case refers to the case where the decision maker does not
consider uncertainty or the case where there is no uncertainty. The uncertainty case refers to
the case in which the decision maker accounts for uncertainty, but her belief remains
unchanged. Information may accumulate, but the decision maker simply ignores the
possibility of learning or chooses to ignore information gathered. Finally, the belief of the
decision maker is subject to change in the learning case. The decision maker fully utilizes
information acquired from temperature observations so that she can make a decision
24
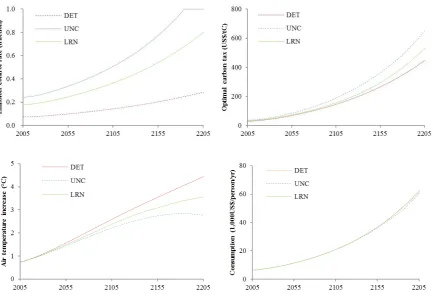
Figure 3 summarizes the effect of learning, which is generally consistent with the literature
as we briefly introduced in Section 1. See Table 2 for some numerical values in 2015. First,
the fat-tailed uncertainty increases the abatement efforts relative to the deterministic case.
This is because the uncertainty model considers the less probable but more dismal future as
well as the most probable (mode) or the expected state of the world. Second, the possibility of
learning reduces the abatement efforts relative to the uncertainty case. Although the
atmospheric temperature increases more in the learning case than in the uncertainty case (see
the bottom left panel, this is because carbon emissions are greater in the learning case as a
result of the lower emissions control rate), the decision maker attains (slightly) more
consumption (in turn, utility) from the learning case. This implies that the experimentation
with more emissions (or learning) is beneficial to the decision maker.
5 The Benefits of Learning
5.1 The Optimal Carbon Tax and Social Welfare
In the learning model, atmospheric temperature evolves according to the true value of the
climate sensitivity, but the decision maker conducts a course of action according to her belief.
Then what if the initial belief on the climate sensitivity turns out to be ‘biased’ (in the sense
that the expected value does not equal the true value)? In order to answer the question the
model is simulated with an assumption that the decision maker has a different belief on the
parameter values of the climate sensitivity distribution according to scenarios. The true value
of the climate sensitivity and the initial variance parameter are assumed to be the same across
all scenarios (i.e., true =3°C/2xCO2 and =0.13), but the mean parameter is different between
25
Put differently, UB, LB, and HB scenarios stand for unbiased belief, low-biased belief, and
high-biased belief cases, respectively in this section.20
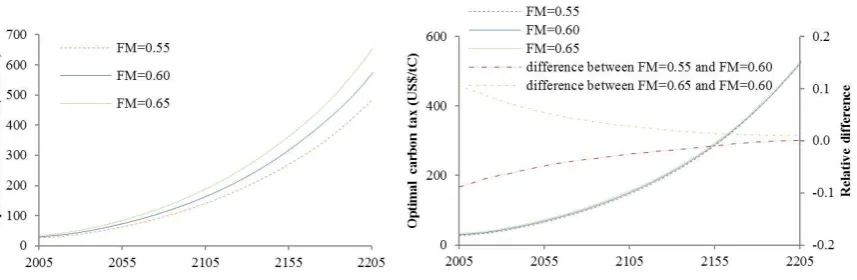
Figure 4 illustrates the results for each scenario. The optimal carbon tax changes a lot
according to the belief of the decision maker in the uncertainty case (see the left panel). The
general trend is that, as expected, the higher is the decision maker’s belief on the climate
sensitivity, the higher is the carbon tax. Compared to the uncertainty case, the differences
among scenarios in the learning case are fairly small and the tax levels converge over time
(see the right panel). This is because learning enables the decision maker to adjust her actions
according to information revealed. The optimal carbon tax is biggest for the HB scenario
( =0.65> =0.6) and lowest for the LB scenario ( =0.55< =0.6) (see also Table 2). However,
as temperature observations accumulate over time the belief of the decision maker
approaches the true value, which is the same across all the scenarios, and thus the difference
in the optimal carbon tax between the scenarios become small in the long run. The rate of
emissions control, temperature increases, and consumption show a similar pattern (results not
shown).
Table 2 illustrates the optimal carbon tax and the net present value of the expected utility
of consumption for each scenario in Figure 4. The optimal carbon tax is higher (lower,
respectively) in the uncertainty case than in the deterministic case, and it decreases (increases,
resp.) in the learning case for the HB and UB scenarios (the LB scenario, resp.). These results
are intuitive in that if the decision maker believes that the climate sensitivity is lower (higher,
20
The model was also simulated with an assumption that the decision maker has the same belief on the
parameter values of the climate sensitivity distribution ( =0.65, =0.13), but the true value is different
between scenarios (e.g., =0.6, 0.65, or 0.7). The general implications of these simulations are similar to the
26
respectively) than the true value, ex ante, her actions become less stringent in the UNC-LB
case compared to the LRN-LB case (the LRN-HB case compared to the UNC-HB case, resp.).
In the UB case, the carbon tax is lower in the learning case because the uncertainty reduces
over time. Numerically learning reduces the effect of deep uncertainty by about 42%.21 In
addition, as shown in Table 2, the uncertainty case is always inferior to the learning case in
terms of utility. Put differently, learning is always valuable in that it increases social welfare.
This is because it allows for a better estimation of the total costs of climate change.
5.2 The Costs of No-learning
In order to see the value of learning in a different perspective, let us suppose that the decision
maker chooses to change her strategy about learning in a specific time period, say in the year
2105. That is, the decision maker starts to update her belief based on temperature
observations after 2105. Under this assumption, the difference in the total costs (the sum of
the damage costs and the abatement costs) between the uncertainty case and the learning case
represents the benefits of learning or penalties for no-learning.
Figure 5 shows the results for the HB scenario ( ). Considering the
differences in gross production and investment between the cases, costs as a fraction of gross
production are presented. As illustrated in the previous section, the optimal rate of emissions
control is lower for the learning case than for the uncertainty case, and thus the abatement
costs are lower but the damage costs are higher for the learning case. The difference in the
abatement costs between the uncertainty case and the learning case decreases after the late
21
This number is calculated as follows. The learning-effect = (the carbon tax for the uncertainty model - the
carbon tax for the learning model) / (the carbon tax for the uncertainty model - the carbon tax for the
27
22th century because the non-negativity constraint of GHG emissions starts to bind for the
uncertainty case. The total costs are lower for the learning case than for the uncertainty case.
For instance, the total costs are 0.26% point (as a fraction of gross world output) lower for the
learning case than for the uncertainty case in 2105.
Table 3 illustrates the results for the year 2105. The cost of no learning in 2105 reduces to
0.12% point of gross world output when the initial belief is not biased from the true value
(the UB scenario). Although the initial belief is not biased from the true value, the uncertainty
case costs more than the learning case because the variance parameter decreases in the
learning case over time. The LB scenario shows the similar results. Since the variance
parameter decreases with temperature observations in the learning case, the extreme climate
sensitivity loses its weight as time goes by, and thus the rate of emissions control is lower for
the learning case. Although the damage costs are higher for the learning case, the total costs
are higher for the uncertainty case. The benefits of learning increase when the difference
between the initial belief and the true state of the world increases (results not shown).
6 Sensitivity Analysis
In this section the learning model is simulated with a more reactive damage function,
namely, that of Weitzman (2012) (Equation 19). The difference between the damage function
of Nordhaus (2008) and the one of Weitzman (2012) becomes significant if temperature
increases are higher (say, 5℃). See Tol (2013) for more discussions on the two damage
functions.
28
where =0, =0.0028388, =0.0000050703, and =6.754.
Figure 6 shows the results. For the uncertainty model, the optimal carbon tax greatly
increases if the damage function of Weitzman (2012) is applied (see the left panel). However,
learning largely offsets this effect of deep uncertainty (or the tail-effect). Numerically
learning reduces the effect of deep uncertainty by about 94% (see footnote 18). This is
because, as shown in Section 3, the tail probability decreases as information gathers in the
learning model. Comparing with the results in Figure 4, this shows that the higher the
tail-effect, the higher the counteracting learning-effect.
The right panel shows the evolution of the optimal carbon tax against the upper bound of
the climate sensitivity. The curvature is increasing and concave, which implies that there may
be an upper bound for the optimal carbon tax even under fat-tailed uncertainty (see Hwang et
al., 2013a).
7 Conclusion
An endogenous (Bayesian) learning model has been developed in this paper. In the model the
decision maker updates her belief on the equilibrium climate sensitivity through temperature
observations and takes a course of actions (carbon reductions) each time period based on her
belief. The uncertainty is partially resolved over time, although the rate of learning is
relatively slow, and this affects the optimal decision. Consistent with the literature, the
decision maker with a possibility of learning lowers the efforts to reduce carbon emissions
relative to the no learning case. Additionally, this paper finds that the higher the effect of
fat-tailed uncertainty (the tail-effect), the higher the counteracting learning effect. Put differently,
29
information revealed to reduce uncertainty, and thus she can make a decision contingent on
the updated information.
In addition, learning enables the economic agent to have less regret for the past decisions
after the true value of the uncertain variable is revealed to be different from the initial belief.
The optimal decision in the learning model is less sensitive to the true value of the uncertain
variable and the initial belief of the decision maker than the decisions in the uncertainty
model. The reason is that learning allows uncertainty to converge to the true value of the state
in the sense that the variance approaches 0 (asymptote) as information accumulates. Deep
uncertainty does matter for optimal climate policy in that it requires more stringent efforts to
reduce GHG emissions. However, learning effectively decreases such an effect of deep
uncertainty. As one learns more, the effect of uncertainty becomes less.
Finally, some caveats are added. First, the learning model of this paper does not take into
account the possibility of ‘negative’ learning. Indeed, as Oppenheimer et al. (2008) argue,
learning does not necessarily converge to the true value of an uncertain variable. The
negative learning may have different impacts from the analysis of this paper. Second, for
simplicity, learning is assumed to be costless in this paper, but in reality learning comes at a
cost. The value and the rate of learning depend on the costs of learning as well as on the
benefits of learning. However, the main implications of this paper would hold even if the
costs of learning are included, unless learning costs more than it earns. Third, learning in this
paper is passive. In the real world, however, there are many ways of active leaning including
research and development. An active learning model incorporates the optimal decision on
activities such as R&D investment for reducing uncertainty, which is an important issue that
30
lacks in consideration of seemingly important issues such as uncertainty about economic
evaluations of damage costs and abatement costs. These topics are referred to future research.
Acknowledgements
The earlier version of this paper (University of Sussex Working Paper Series No. 53-2012)
was presented at the 20th annual conference of the European Association of Environmental
and Resource Economists (EAERE) in June 2013. The authors are grateful to conference
participants for useful comments and discussions. We also would like to thank David Anthoff,
Michael Roberts, and anonymous reviewers for valuable comments and suggestions on the
31
Appendix A: The Computational Method for the Learning Model and its Accuracy
This Appendix illustrates the detailed solution method for the learning model of the current
paper. This provides additional information to Section 2.3. The solution method for solving
the revised DICE model including backstop technology is presented here since it is more
general. The accuracy tests for this general model are presented in Figure A.1. Thus it is
different from the results of the deterministic case shown in Section 4. The simplified model
(without backstop technology) is also accurate in the criterion used for the general model.
The basis function used in this paper is Equation (A.1), which is a logarithmic function.
The main criterion for the choice of the basis function in this paper is simplicity, convenience
for deriving the first order conditions, and accuracy. The logarithmic basis function suits for
the purpose of this paper one these grounds. Alternatives including ordinary polynomials and
Chebyshev polynomials do not perform better than the logarithmic function. Since is a
parametric uncertainty and is a white noise in this paper, Equation (16) reduces into
Equation (A.1).
( ) ( )
( ) ( ) ( )
( ̅ )
( )
(A.1)
where the notations are the same as in Section 2.
32
(A.2)
where is the law of motions for the state variables. The resulting policy rule for the
emissions control rates is the function of the state variables and coefficients . Since the
emissions control rates are bounded, the technique for solving complementarity problems as
detailed in Miranda and Fackler (2004) is applied for finding solutions for Equation (A.2).
Technically, a Fisher’s function for the root-finding problem is used and then Equation (A.2)
is numerically solved with the Newton’s method (Judd, 1998; Miranda and Fackler, 2004).
The expectation operator is calculated with a deterministic integration method. More
specifically, the Gauss–Hermite quadrature (GH) is applied.
∑
(A.3)
where is the integration node, is the corresponding weight, J is the total number of
integration nodes.
The integration nodes and the integration weights are calculated from the GH formula
(Judd, 1998). J is set to be 10 for simulations, but there is no significant difference in the
33
From the above procedures, a time series of control variables can be calculated. Note that
all required information is at our hand if the initial guess on is chosen. The initial guess
is chosen from the equilibrium conditions on the state variables. Once the control variable is
calculated, the state variables and the value function are obtained from the transitional
equations and Equation (A.1). Note that all variables including the control variables, the state
variables, utility, and the value function are dependent on the initial guess .
Equation (15) is evaluated under the stopping rule:
| | (A.4)
where is the tolerance level and refers to the pth iteration.
For the deterministic model and the uncertainty model is 10-6, but for the learning
model is set to be 10-4 in order to reduce the computational burden. Furthermore, the
mean operator instead of the maximization operator is used for the learning model. Since
there is no significant difference in the results even if the simulation length is over 1,000, the
time horizon for is set to 1,000 for simulations.
If the left hand side (LHS) of inequality (A.4) is higher than the tolerance level, a new is
estimated so as to minimize the approximation errors between LHS and the right hand side
(RHS) of the Bellman equation (15). Technically, in order to avoid an ill-conditioned
problem during regression, the least-square method using a singular value decomposition
(SVD) is applied (see Judd et al., 2011).
34
̂ (A.5)
where ̂ is the vector of coefficients estimated from the regression, is a parameter for
updating (0< <1).
For an accuracy test, the results obtained from the deterministic version of DICE applying
the above-mentioned method in MATLAB are compared with the results obtained from the
deterministic version of DICE applying nonlinear programming in GAMS (i.e., the original
programming code, made available by William Nordhaus, is run in GAMS). Figure A.2 is the
results. It shows that the dynamic programming method produces almost the same results as
the original ones. The uncertainty model also produces good results (not shown).
In addition, the accuracy of the dynamic programming method is tested as follows. First,
the maximum welfare over a grid of the control variable is calculated every time period.22
More specifically, the model is simulated with a fixed emissions control rate (1,000 grid
points from 0 to 1) and then the rate of emissions control which results in maximum welfare
is chosen for every time period. Finally, the emissions control rate obtained above and the
emissions control rate obtained from the dynamic programming method are compared. The
result is that the maximum difference between the two values over the whole time periods is
about 10-4.
22
35 Table 1 Tail probability of the climate sensitivity distribution
Probability/Year 2005 2055 2105 2155 2205
Pro(CS>4.5℃) 0.253 0.149 0.043 0.006 4.00E-04
Pro(CS>6℃) 0.122 0.049 0.005 7.70E-05 2.98E-07
Pro(CS>10℃) 0.038 0.008 1.35E-04 6.18E-08 1.55E-12
[image:36.595.67.529.274.408.2]Note: As with Figure 1, =0.65, =0.13, and =0.6 for the calculation of numbers in this table.
Table 2 The optimal carbon tax and the net present value of utility
Deterministic
=0.60
Uncertainty
=0.60, =0.13
Learning
=0.60, =0.13
LB ̅=0.55 UB ̅=0.60 HB ̅=0.65 LB =0.55 UB =0.60 HB =0.65
Optimal carbon tax in
2015 (US$/tC) 32.0 29.6 34.4 39.7 30.7 33.4 36.5
Net present value of
utility (arbitrary unit) 0 -1.711 -1.705 -1.709 -1.703 -1.703 -1.703
Note: The net present value of utility is the difference between each case and the deterministic case.
Table 3 The costs of no learning in 2105
=0.6 (true =3°C/2xCO2)
LB =0.55< =0.6 UB =0.60= =0.6 HB =0.65> =0.6 Abatement costs
(% gross world output) 0.55 0.24 0.49
Damage costs
(% gross world output) -0.20 -0.11 -0.21
Total costs
(% gross world output) 0.35 0.12 0.26
Note: The costs are calculated as the difference in the costs between the uncertainty model and the learning
[image:36.595.77.518.502.642.2]36
Figure 1 Learning about the climate sensitivity (Top Left): The parameters of the climate sensitivity
distribution: the mean and the variance of the total feedback factors. (Top Right): The coefficient of variation
(= mean / standard deviation) of the simulated climate sensitivity distribution (relative to the coefficient of
variation in 2005). (Bottom Left): Climate sensitivity distribution (0~10°C/2xCO2). (Bottom Right): Climate
sensitivity distribution (10~30°C/2xCO2). The density for the year 2205 approaches 0 far faster than the other
[image:37.595.77.503.85.395.2] [image:37.595.82.510.561.712.2]37
Figure 2 Sensitivity of the rate of learning (Top left): Sensitivity on the true value of the climate sensitivity.
refers to the true value of the total feedback factors. The corresponding true values of the climate sensitivity
are 3°C/2xCO2 ( =0.6), 3.43°C/2xCO2 ( =0.65), and 4°C/2xCO2 ( =0.7). Throughout the top left panel
=0.65 and =0.13. (Top right): Sensitivity on the initial uncertainty. refers to the initial standard deviation of the total feedback factors. Throughout the top right panel =0.6 and =0.65. (Bottom left):
Sensitivity on temperature shocks. refers to the standard deviation of temperature shocks. (Bottom right):
Sensitivity on damage function. Throughout the bottom panels , =0.65, and =0.13.
Figure 3 The effect of learning (Top Left): Emissions control rates. (Top Right): The optimal carbon tax.
[image:38.595.83.517.425.722.2]38
LRN refer to the deterministic case ( =0.6), the uncertainty case ( =0.6, ̅=0.65, =0.13), and the learning
[image:39.595.87.516.172.312.2]case ( =0.6, =0.65, =0.13), respectively.
Figure 4 Carbon tax according to the initial belief (Left): The uncertainty case. FM refers to the mean of the
total feedback factors. (Right): The learning case. The relative difference in the carbon tax between the cases is
also presented in the right panel (right axis). It is calculated as follows: (the carbon tax for A - the carbon tax for
[image:39.595.84.516.446.590.2]B) / the carbon tax for B, where A and B refer to each case.
Figure 5 The costs of no learning (the HB scenario) (Left): The abatement costs and the damage costs. UNC
and LRN refer to the uncertainty case and the learning case. (Right): The costs of no learning. The costs are
calculated as the difference in the costs between the uncertainty model and the learning model. Thus the positive
value means that the uncertainty case costs more than the learning case. ABT, DAM, and TOTAL refer to the
39
Figure 6 Sensitivity analysis (the HB case) (Left): The optimal carbon tax. DET, UNC and LRN refer to the
deterministic case, the uncertainty case and the learning case. The optimal carbon tax in 2015 is 373.0US$/tC
and 56.4 US$/tC for the uncertainty case and the learning case, respectively. (Right): The optimal carbon tax as
a function of uncertainty (the learning model). Note that x-axis is displayed in a logarithmic scale (base 10). In
order to reduce computational burden the standard deviation of temperature shocks are assumed to be 0.05 for
the bottom panel. This does not affect the implications of the results. Throughout the figures =0.6 (true
=3°C/2xCO2), =0.65, and =0.13.
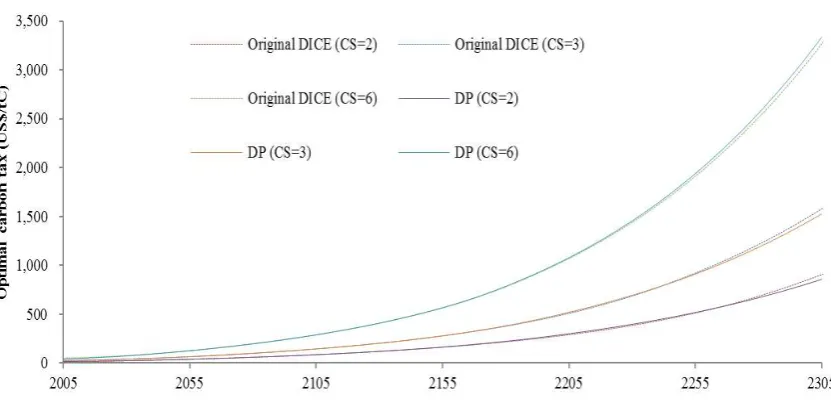
Figure A.1 Comparison of the results from dynamic programming in MATLAB with the results from
nonlinear programming in GAMS DP refers to the results obtained from dynamic programming. Original DICE
refers to the results obtained from running the programming code made available by William Nordhaus in
[image:40.595.91.507.403.607.2]