Original citation:
Kratsch, Stefan , Pilipczuk, Marcin, Pilipczuk, MichaŁ and Wahlström, Magnus . (2015)
Fixed-parameter tractability of multicut in directed acyclic graphs. SIAM Journal on
Discrete Mathematics, Volume 29 (Number 1). pp. 122-144. ISSN 0895-4801
Permanent WRAP url:
http://wrap.warwick.ac.uk/66096
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work of researchers of the
University of Warwick available open access under the following conditions. Copyright ©
and all moral rights to the version of the paper presented here belong to the individual
author(s) and/or other copyright owners. To the extent reasonable and practicable the
material made available in WRAP has been checked for eligibility before being made
available.
Copies of full items can be used for personal research or study, educational, or
not-for-profit purposes without prior permission or charge. Provided that the authors, title and
full bibliographic details are credited, a hyperlink and/or URL is given for the original
metadata page and the content is not changed in any way.
Publisher’s statement:
© SIAM 2015
A note on versions:
The version presented in WRAP is the published version or, version of record, and may
be cited as it appears here.
FIXED-PARAMETER TRACTABILITY OF MULTICUT IN
DIRECTED ACYCLIC GRAPHS∗
STEFAN KRATSCH†, MARCIN PILIPCZUK‡, MICHAL PILIPCZUK§, AND
MAGNUS WAHLSTR ¨OM¶
Abstract. TheMulticutproblem, given a graphG, a set of terminal pairsT ={(si, ti)|1≤
i ≤r}, and an integerp, asks whether one can find acutset consisting of at mostp nonterminal vertices that separates all the terminal pairs, i.e., after removing the cutset, ti is not reachable fromsi for each 1≤i ≤r. The fixed-parameter tractability of Multicutin undirected graphs, parameterized by the size of the cutset only, has been recently proved by Marx and Razgon [SIAM J. Comput., 43 (2014), pp. 355–388] and, independently, by Bousquet, Daligault, and Thomass´e [Proceedings of STOC, ACM, 2011, pp. 459–468], after resisting attacks as a long-standing open problem. In this paper we prove thatMulticutis fixed-parameter tractable on directed acyclic graphs when parameterized both by the size of the cutset and the number of terminal pairs. We complement this result by showing that this is implausible for parameterization by the size of the cutset only, as this version of the problem remainsW[1]-hard.
Key words. fixed-parameter tractability, multicut, directed acyclic graph, important separa-tors, shadow removal
AMS subject classifications.05C85, 68R10, 68W05
DOI.10.1137/120904202
1. Introduction. Parameterized complexity is an approach for tackling hard problems by designing algorithms that perform robustly, when the input instance is in some sense simple; its difficulty is measured by an integer that is additionally appended to the input, called the parameter. Formally, we say that a problem is
fixed-parameter tractable (FPT) if it can be solved by an algorithm that runs in time
f(k)ncfornbeing the length of the input andkbeing the parameter, wheref is some computable function andc is a constant independent of the parameter.
The search for fixed-parameter algorithms resulted in the introduction of a num-ber of new algorithmic techniques and gave fresh insight into the structure of many classes of problems. One family that has received a lot of attention recently is the so-called graph cut problems, where the goal is to make the graph satisfy a global separation requirement by deleting as few edges or vertices as possible (depending on
∗Received by the editors January 2, 2013; accepted for publication (in revised form) October 21, 2014; published electronically January 15, 2015. A preliminary version of this paper was presented at the 39th International Colloquium on Automata, Languages and Programming (ICALP 2012).
http://www.siam.org/journals/sidma/29-1/90420.html
†Technische Universit¨at Berlin, 10623 Berlin, Germany ([email protected]). This re-search was done while the author was at the University of Utrecht, Netherlands, and was supported by the Netherlands Organization for Scientific Research (NWO), project “KERNELS: Combinatorial Analysis of Data Reduction.”
‡University of Warwick, Coventry CV4 7AL, UK ([email protected]). This research was done while the author was at the University of Warsaw, Poland, and was supported by NCN grant N206567140 and the Foundation for Polish Science.
§University of Warsaw, Krakowskie Przedmiescie 26/28, 00-927 Warszawa, Poland (michal.
[email protected]). This research was done while the author was at the University of Bergen, Norway, and was supported by European Research Council (ERC) grant “Rigorous Theory of Pre-processing,” reference 267959.
¶Royal Holloway University of London, Egham Hill, Egham, Surrey TW20 0EX, UK ([email protected]). This research done while the author was at the Max-Planck Insti-tute for Informatics, Saarbr¨ucken, Germany.
122
the variant). Graph cut problems in the context of fixed-parameter tractability were to our knowledge first introduced explicitly in the seminal work of Marx [12], where it was proved that (i) Multiway Cut (separate all terminals from each other by
a cutset of size at most p) in undirected graphs is FPT when parameterized by the size of the cutset; (ii)Multicut in undirected graphs is FPT when parameterized
by both the size of the cutset and the number of terminal pairs. Fixed-parameter tractability of Multicutparameterized by the size of the cutset only was left open
by Marx [12] and resolved only much later (see below).
Probably the most fruitful contribution of the work of Marx [12] is the concept of
important separators, which proved to be a tool almost perfectly suited to capturing the bounded-in-parameter character of sensible cutsets. The technique proved to be extremely robust and serves as the key ingredient in a number of FPT algorithms [13,12,4,8,14,3,10,11,6]. In particular, the fixed-parameter tractability of Skew Multicut in directed acyclic graphs (DAGs), obtained via a simple application of
important separators, enabled the first FPT algorithm for Directed Feedback Vertex Set[4], resolving another long-standing open problem.
However, important separators have a drawback in that not all graph cut problems admit solutions with “sensible” cutsets in the required sense. This is particularly true in directed graphs, where, with the exception of the aforementionedSkew Multicut
problem inDAGs, for a long time few FPT graph cut problems were known; in fact,
up until very recently it was open whetherMultiway Cutin directed graphs admits
an FPT algorithm even in the restricted case of two terminals. The same complication arises in the undirectedMulticutproblem parameterized by the size of the cutset.
After a long struggle,Multicutwas shown to be FPT by Marx and Razgon [13]
and, independently, by Bousquet, Daligault, and Thomass´e [2]. The key component in the algorithm of Marx and Razgon [13] is the technique ofshadow removal, which, in some sense, serves to make the solutions to cut problems more well-behaved. This was adapted to the directed case by Chitnis, Hajiaghayi, and Marx [6], who proved that
Multiway Cut, parameterized by the size of the cutset, is FPT for an arbitrary
number of terminals, by a simple and elegant application of the shadow removal technique. A subsequent work by Chitnis et al. [5] improves the complexity bounds of the shadow removal technique and applies it to show fixed-parameter tractability of Directed Subset Feedback Vertex Set. This gives hope that, in general,
shadow removal may be helpful for the application of important separators to the directed world.
As for the directed Multicutproblem, it was shown by Marx and Razgon [13]
to beW[1]-hard when parameterized only by the size of the cutset but otherwise had unknown status, even for a constant number of terminals in a DAG. We note that
this case is known to be NP-hard and APX-hard [1].
Our results. The main result of this paper is the proof of fixed-parameter tractabil-ity of theMulticut in DAGsproblem, formally defined as follows:
Multicut in DAGs Parameter: p+r
Input: DAG G, set of terminal pairsT ={(si, ti)|1≤i≤r},si, ti ∈V(G) for 1≤i≤r, and an integerp.
Question: Does there exist a setZ of at mostpnonterminal vertices ofG, such that for any 1≤i≤rthe terminalti is not reachable fromsi in G\Z?
More precisely, we prove the following theorem.
Theorem 1.1. Multicut in DAGscan be solved in O∗(2O(rp(r+p2)))time.
Note that throughout the paper we useO∗-notation to suppress polynomial fac-tors. Note also that we focus on vertex cuts; it is well known that in the directed acyclic setting the arc- and vertex-deletion variants are equivalent (cf. [6]).
Our algorithm makes use of the shadow removal technique introduced by Marx and Razgon [13], adjusted to the directed setting by Chitnis, Hajiaghayi, and Marx [6] with the improved bounds of [5], as well as the basic important separators toolbox that can be found in [6]. We remark that the shadow removal is but one of a number of ingredients of our approach: in essence, the algorithm combines the shadow removal technique with a degree reduction for the sources in order to carefully prepare the structure of the instance for a simplifying branching step. For a more detailed overview of a single step of the algorithm we also refer to Figure1later in this work.
We complement the main result with two lower bounds. First, we show that the dependency onrin the exponent is probably unavoidable.
Theorem 1.2. Multicut in DAGs, parameterized by the size of the cutset
only, isW[1]-hard.
Thus, we complete the picture of parameterized complexity of Multicut in DAGs. We hope that it is a step toward fully understanding the parameterized
complexity of Multicutin general directed graphs.
As a related result, we establish NP-completeness of Skew Multicut, which is
the special case of Multicut in DAGswhere we are givendsources (si)d
i=1 and d sinks (ti)di=1, and the set of terminal pairs is defined asT ={(si, tj) : 1 ≤i≤j ≤
d}. The significance of this problem is mainly that it is used as a core subroutine in the FPT algorithm for Directed Feedback Vertex Set of Chen et al. [4].
A polynomial-time algorithm for Skew Multicut might have given new insights
into Directed Feedback Vertex Set, with potential consequences both for the
running time of the FPT algorithm and, arguably, for the existence of a polynomial kernel (which is now one of the major open problems in kernelization; see, e.g., [9]).
Theorem 1.3. Skew Multicut is NP-complete even in the restricted case of
two sinks and two sources.
Organization of the paper. In section 2 we introduce some notation and recall
the framework of important separators and shadow removal. Section 3 contains our algorithm forMulticut in DAGsand the proof of Theorem 1.1, whereas section4
contains the proofs of Theorems1.2and1.3. We conclude with a discussion on open problems in section5.
2. Preliminaries. For a directed graph G, by V(G) and E(G) we denote its vertex and arc set, respectively. For a vertexv∈V(G), we define itsin-neighborhood
NG−(v) = {u: (u, v) ∈ E(G)} and out-neighborhood N
+
G(v) ={u : (v, u)∈ E(G)}; these definitions are extended to sets X ⊆ V(G) by NG−(X) = (v∈XNG−(v))\X and NG+(X) = (v∈XNG+(v))\X. The in-degree and out-degreeof v are defined as
|NG−(v)| and|N
+
G(v)|, respectively. In this paper we consider simple directed graphs only; if at any point a modification of the graph results in a multiple arc, we delete all copies of the arc except for one. ByGrev we denote the graphGwith all the arcs reversed, i.e.,Grev = (V(G),{(v, u) : (u, v)∈E(G)}).
A path in G is a sequence of pairwise distinct verticesP = (v1, v2, . . . , vd) such that (vi, vi+1)∈E(G) for any 1≤i < d. If v1 is the first vertex of the path P and
vd is the last vertex, we say thatP is a v1vd-path. We extend this notion to sets of vertices: if v1 ∈ X and vd ∈ Y for some X, Y ⊆ V(G), then P is an XY-path as well. For a path P = (v1, v2, v3, . . . , vd) the verticesv2, v3, . . . , vd−1 are the internal vertices ofP. The set of internal vertices of a path P is theinterior ofP. We say
that a vertex v is reachablefrom a vertex uin Gif there exists auv-path inG. As the considered digraphs are simple, each pathP = (v1, v2, . . . , vd) has a uniquefirst
arc (v1, v2) and a uniquelast arc (vd−1, vd).
Let (G,T, p) be a Multicut in DAGsinstance with a set of r terminal pairs
T ={(si, ti) : 1≤i≤r}. We call the terminalssi source terminalsand the terminals
tisink terminals. We letTs={si: 1≤i≤r},Tt={ti: 1≤i≤r}andT =Ts∪Tt. Fix a topological order of G. For any sets X, Y ⊆ V(G), we may order the vertices ofX and Y with respect toand compareX and Y lexicographically; we refer to this order on subsets ofV(G) as thelexicographical order.
A setZ ⊆V(G) is called a multicutin (G,T, p) ifZ contains no terminals, but for each 1≤i≤r,tiis not reachable fromsiinG\Z. Given aMulticut in DAGs
instance I = (G,T, p) a multicut Z is called a solution if |Z| ≤ p. A solution Z is called a lex-min solution if Z is lexicographically minimum solution in I among solutions of minimum possible size.
Consider the following easy reduction.
Lemma 2.1. There exists a polynomial-time algorithm that, given a Multicut
in DAGsinstance(G,T, p), computes an equivalent instance(G,T, p) such that
1. |T |=|T| andp=p;
2. T={(si, ti) : 1≤i≤r} and all terminals si andti are pairwise distinct;
3. for each1≤i≤rwe have NG−(si) = 0and NG+(ti) = 0.
Proof. To construct the graphG, start with the graphGand for each terminalvof
T replacevwithp+1 copies ofv(i.e., vertices with the same in- and out-neighborhoods as v; these copies are not terminals in T). Moreover, for each 1≤i≤r, add toG a new terminalsi with arcs {(si, u) : u∈ NG+(si)} and a new terminal ti with arcs
{(u, ti) :u∈NG−(ti)}. Finally, takeT={(si, ti) : 1≤i≤r} andp =p.
To see the equivalence, first take a multicutZ in (G,T, p) and an arbitrarysiti -path P = (si, v1, v2, . . . , vd, ti) in G. Assume without loss of generality (w.l.o.g.) thatP visits at most one copy of each terminalvin T, or elseP contains a shorter
siti-path as a strict subpath. The path P induces a path P = (si, v1, v2, . . . , vd, ti) in G: vk =vk ifvk is present inG, andvk =v if vk is one of the p+ 1 copies of a terminalv in T. The pathP is intersected byZ on some nonterminal vertex vk; as
vk =vk,Z intersectsP. We infer thatZ is a multicut in (G,T, p) as well. In the other direction, let Z be a multicut in (G,T, p) of size at most pand letP = (si, v1, v2, . . . , vd, ti) be an arbitrarysiti-path in G. Construct a path P = (si, v1, v2, . . . , vd, ti) by taking vk =vk ifvk is a nonterminal in (G,T, p) and taking
vk to be one of the copies of vk that is not contained in Z otherwise; note that at least one copy is not contained inZ, as|Z| ≤ p. As Z is a multicut in (G,T, p),
Z intersectsP. By the choice of the internal vertices ofP,Z intersectsP on some vertex vk = vk for vk being a nonterminal in (G,T, p). Therefore Z ∩V(G) is a multicut in (G,T, p).
In our algorithm, the set of terminal pairsT is never modified, and we never add an arc into a source or out of a sink. Thus, we may assume that during the course of our algorithm all terminals are pairwise distinct and that NG−(si) =NG+(ti) =∅ for all 1≤i≤r.
For v ∈V(G), by S(G, v) we denote set of source terminals si for which there exists ansiv-path inG. For a setS⊆TsbyV(G, S) we denote the set of nonterminal verticesv for whichS(G, v) =S.
2.1. Important separators and shadows. In the rest of this section we recall the notion of important separators by Marx [12], adjusted to the directed case by
Chitnis, Hajiaghayi, and Marx [6], as well as the shadow removal technique of Marx and Razgon [13] and Chitnis, Hajiaghayi, and Marx [6,5].
Definition 2.2 (separator [6, Definition 2.2]). Let G be a directed graph with
terminals T ⊆V(G). Given two disjoint nonempty sets X, Y ⊆V(G), we call a set
Z ⊆V(G) an X−Y separatorif (i) Z∩T =∅,(ii) Z∩(X∪Y) =∅,(iii) there is no path from X toY inG\Z. AnX−Y separatorZ is calledminimalif no proper subset of Z is an X−Y separator.
By cutG(X, Y) we denote the size of a minimumX−Y separator inG; cutG(X, Y) =∞ifGcontains an arc going directly fromX toY (recall that in our instances all terminals have in- or out-degree zero). By Menger’s theorem, cutG(X, Y) equals the maximum possible size of a family ofXY-paths with pairwise disjoint interiors.
Definition 2.3 (important separator [6, Definition 4.1]). Let G be a directed
graph with terminals T ⊆ V(G) and let X, Y ⊆ V(G) be two disjoint nonempty
sets. Let Z and Z be two X −Y separators. We say that Z is behind Z if any
vertex reachable from X in G\Z is also reachable from X in G\Z. A minimal
X−Y separator Z is animportant separatorif no otherX−Y separatorZ satisfies |Z| ≤ |Z| while being also behindZ.
We also need some known properties of minimum size cuts (cf. [3,6]).
Lemma 2.4 ([6, Lemma B.4]). Let G be a directed graph with terminals T ⊆
V(G). For two disjoint nonempty sets X, Y ⊆ V(G), there exists exactly one
mini-mum size important X−Y separator.
Definition 2.5 (closest mincut). Let G be a directed graph with terminals
T ⊆ V(G). For two disjoint nonempty sets X, Y ⊆ V(G), the unique minimum
size important X−Y separator is called theX−Y mincut closest toY. TheX−Y
mincut closest toX is the Y −X mincut closest toX in Grev.
Lemma 2.6. Let Gbe a directed graph with terminals T ⊆V(G)and letX, Y ⊆
V(G) be two disjoint nonempty sets. Let B be the unique minimum size important
X−Y separator, that is, theX−Y mincut closest toY, and letv∈Bbe an arbitrary vertex. Construct a graphG fromGas follows: deletevfromGand add an arc(x, w)
for each x∈X andw∈ NG+(v)\X, where X is the set of vertices reachable from
X inG\B. Then the size of any X−Y separator in G is strictly larger than |B|. Proof. The claim is obvious ifY ∩NG+(v)=∅, as then G contains a direct arc fromX toY. Therefore, let us assume thatY ∩NG+(v) =∅.
We prove the lemma by exhibiting more than |B| XY-paths in G that have pairwise disjoint interiors. Recall thatX ⊇X is the set of vertices reachable from
X in G\B; note thatNG+(X) =B. Since B is a minimum size X−Y separator, there exist a set of XY-paths (Pu)u∈B such thatPu intersects B only in uand the interiors of paths Pu are pairwise disjoint. Note that each path Pu can be split into two parts: PuX, betweenX andu, with all vertices except forucontained inX, and
PY
u, betweenuandY, with all vertices except forucontained inY=V(G)\(X∪B). Consider a graph G defined as follows: we take the graph G[V(G)\X] and add a terminalsand arcs (s, w) for allw∈NG+(X) = (B\ {v})∪(NG+(v)\X). Let
B be a minimum sizes−Y separator inG.
We claim thatB is an X−Y separator inG. Let P be an arbitraryXY-path in Gand letube the last (closest to Y) vertex ofB onP. Then inG there exists a shortened versionP ofP: if u=v andwis the vertex directly afteruonP, then
P starts with the arc (s, w) and then followsP to Y (observe thatw /∈X, asv was the last vertex ofBonP), while ifu=v, thenP starts with the arc (s, u) and then followsP toY. AsB has to intersectP, thenB also intersectsP.
Moreover, we claim thatB is behindB. This follows directly from the fact that
Gdoes not containX, so X is still reachable fromX in G\B.
AsB is an important separator,B is behindB, andB=B (asv∈B\B), we have that|B|>|B|. Therefore, there exists a familyP of at least|B|+ 1sY-paths in G that have pairwise disjoint interiors. Observe that all these paths are disjoint withX by the construction ofG. Each path from P that starts with an arc (s, w) forw∈NG+(v)\X is present (with the first vertex replaced by an arbitrary vertex of X) inG as well. Moreover, each other path starts with an arc (s, u) for u∈B; in G such a path can be concatenated with the Xu-path PuX. All paths PuX are entirely contained inX except for the endpointu, so we obtain the desired family of
XY-paths inG.
We use the technique of shadows [13,6,5] to identify vertices separated from all sources in a given Multicut in DAGsinstance. We note that we do not use the
full power of the shadow removal technique in directed graphs: the delicate part of the results of Chitnis, Hajiaghayi, and Marx [6, 5] is to remove forward and reverse shadows at once; in our work we need to remove only one type of shadows, namely, forward ones.
We now recall the necessary definitions of the shadow removal technique from [6] and the improved bounds of [5]. Although we give full definitions for completeness, we will chiefly need Definition2.10and Lemma2.11in the rest of the paper.
Definition 2.7 (shadow [6, Definition 2.3]). Let Gbe a directed graph andT ⊆
V(G)be a set of terminals. LetZ⊆V(G)be a subset of vertices. Then forv∈V(G)
we say that
1. v is in theforward shadowofZ (with respect to T) if Z is a T−v separator inG, and
2. v is in thereverse shadow ofZ (with respect toT) if Z is av−T separator inG.
Definition 2.8 (thin [6, Definition 4.4]). Let G be a directed graph and T ⊆
V(G) a set of terminals. We say that a set Z ⊆V(G) is thin in G if there is no
v∈Z such thatv belongs to the reverse shadow of Z\ {v} with respect toT.
Theorem 2.9 (derandomized random sampling [5]1). There is an algorithm that,
given a directed graph G, a set of terminalsT ⊆V(G), and an integerp, produces in timeO∗(2O(p2)) a familyAof size 2O(p2)log|V(G)|of subsets of V(G)\T such that
the following holds. Let Z ⊆V(G)\T be a thin set with |Z| ≤p and let Y be a set such that for every v∈Y there is an important v−T separator Zv ⊆Z. For every such pair (Z, Y)there exists a setA∈ Asuch thatA∩Z =∅ but Y ⊆A.
We use Theorem 2.9 to identify vertices separated from all sources in a given
Multicut in DAGsinstance.
Definition 2.10 (source shadow). Let (G,T, p) be a Multicut in DAGs
instance andZ ⊆V(G) be a set of nonterminals in G. We say that v ∈V(G) is in
source shadowofZ if Z is aTs−v separator.
Lemma 2.11 (derandomized random sampling for source shadows). There is
an algorithm that, given a Multicut in DAGsinstance (G,T, p), produces in time
O∗(2O(p2))a family A of size2O(p2)log|V(G)| of subsets of nonterminals ofG such
that if (G,T, p) is a YES instance and Z is the lex-min solution to (G,T, p), then there existsA∈ Asuch that A∩Z =∅ and all vertices of source shadows of Z in G are contained in A.
1We cite here improved yet unpublished bounds of [5]. See [6, Theorem 4.1 and section 4.3] for the same result but with double-exponential bounds.
Proof. LetY be the set of vertices in source shadow ofZ. To prove the lemma it is sufficient to apply Theorem2.9for the graphGrev with terminalsTsand budgetp. Thus, we need to prove that the pair (Z, Y) satisfies properties given in Theorem2.9. First, assume thatZis not thin inGrevw.r.t. Ts. Letv∈Zbe a witness: Z\{v} is av−Tsseparator in Grev. We infer thatS(G\(Z\ {v}), v) =∅andZ\ {v} is a multicut in (G,T), a contradiction to the choice ofZ.
Second, take an arbitrary vertex u ∈ Y, that is, uis in source shadow of Z in
G. Let B ⊆Z be the set of those vertices v ∈ Z for which there exists a vu-path in G\(Z \ {v}). Clearly, B is a u−Ts separator in Grev. We claim that it is an important one.
IfB is not a minimalu−Tsseparator inGrev, letv∈B be such thatB\ {v}is a u−Tsseparator in Grev; thenB\ {v} is av−Tsseparator in Grev (as there is a
vu-path in G\(Z\ {v})) andZ\ {v} is a multicut in (G,T), a contradiction to the choice ofZ.
Assume then that there exists au−TsseparatorBinGrev that isbehindBand
|B| ≤ |B|, B =B. We claim that Z = (Z\B)∪B is a multicut in (G,T). This would lead to a contradiction with the choice ofZ, as|Z| ≤ |Z|andZ is smaller in the lexicographical order than Z. Assume then that Z is not a multicut in (G,T), that is, there is an siti-path P in G\Z for some 1≤i ≤r. As Z is a multicut in (G,T),P contains at least one vertexv ∈B\B =Z\Z. By the choice ofB and the fact that B is behindB in Grev, we infer that there exists avu-path inG\Z. AsP containsv, there exists ansiu-path inG\Z, a contradiction to fact thatB is anu−Tsseparator inGrev. This concludes the proof of the lemma.
3. The algorithm. We now present the FPT algorithm forMulticut in DAGs.
The algorithm is an intricate, multistep branching process using several tools, hence we split the presentation into several parts. In section3.1, we give the basic notions and results and introduce the potential function we will use to analyze the branching process. In section3.2, we present an importantdegree reductionprocess, by which we can arrange so that the source terminals have bounded degree. Section3.3 contains an overview of the branching process, and finally section3.4gives the full details and correctness proofs. A diagram of the algorithm is given in Figure1.
3.1. Potential function and simple operations. Our algorithm consists of a number of branching steps. To measure the progress of the algorithm, we introduce the following potential function.
Definition 3.1 (potential). Given aMulticut in DAGsinstanceI= (G,T, p),
we define its potential φ(I)asφ(I) = (r+ 1)p−ri=1cutG(si, ti).
Observe that if I = (G,T, p) is a Multicut in DAGs instance, in which
cut(si, ti) > p for some (si, ti) ∈ T, then we can immediately conclude that I is a NO instance. Therefore, w.l.o.g. we can henceforth assume that cut(si, ti)≤pfor all (si, ti)∈ T in all the appearing instances of Multicut in DAGs.
In many places we perform the following simple operations on Multicut in DAGsinstances (G,T, p). We formalize their properties in subsequent lemmata.
Definition 3.2 (killing a vertex). For aMulticut in DAGsinstance(G,T, p)
and a nonterminal vertexv of G, bykilling the vertexv we mean the following oper-ation: we delete the vertexv and decrease pby one.
Definition 3.3 (bypassing a vertex). For a Multicut in DAGs instance
(G,T, p) and a nonterminal vertex v of G, by bypassing the vertex v we mean the following operation: we delete the vertexv and for each in-neighborv− of vand each out-neighbor v+ ofv we add an arc (v−, v+).
Lemma 3.4. Let I = (G,T, p−1) be obtained from Multicut in DAGs
instanceI = (G,T, p)by killing a vertexv. ThenI is a YES instance if and only if I is a YES instance that admits a solution that containsv. Moreover, φ(I)< φ(I).
Proof. LetZ be a multicut inIthat containsv. AsG\Z=G\(Z\{v}),Z\{v} is a multicut inI of size|Z| −1. In the other direction, ifZ is a multicut inI, then
G\Z =G\(Z∪ {v}) andZ∪ {v}is a multicut inI of size|Z|+ 1. To see that the potential strictly decreases, note that cutG(si, ti)≥ cutG(si, ti)−1 for all 1 ≤i ≤
r.
Lemma 3.5. Let I= (G,T, p)be obtained from Multicut in DAGsinstance
I= (G,T, p)by bypassing a vertexv. Then
1. any multicut in I is a multicut inI as well;
2. any multicut in I that does not contain v is a multicut in I as well;
3. S(G, u) =S(G, u)for anyu∈V(G) =V(G)\ {v};
4. φ(I)≤φ(I).
Proof. The lemma follows from the following observations on relations between paths in GandG. For a pathP in Gwhose first and last points are different from
v, we define PG asP with a possible occurrence ofv removed. By the definition of
G, PG is a path inG. In the other direction, for a path P in G, we define PG as
a path obtained from P by inserting the vertexv between any consecutive vertices
vi, vi+1 for which (vi, vi+1)∈E(G)\E(G). SinceGandG are acyclic, the vertexv is inserted at most once. By the construction ofG,PG is a path inG.
Now, for a multicutZ in I and an arbitrary siti-pathP in G, the path PG is intersected by Z; thus P is intersected by Z as well and Z is a multicut in I. For a multicut Z in I with v /∈ Z, and an arbitrary siti-path P in G, the path PG is intersected by Z. As v /∈Z, we infer that P is intersected byZ as well and Z is a multicut inI.
To prove the third claim, note that for any u ∈ V(G), any siu-path P in G yields an siu-path PG in G and vice versa. Finally, the last claim follows from
the fact that any family P of siti-paths in G with pairwise disjoint sets of internal vertices can be transformed into a similar family P = {PG : P ∈ P} in G. Thus
cutG(si, ti)≥cutG(si, ti) for 1≤i≤r.
We note that bypassing a vertex corresponds to the torso operation of Chitnis, Hajiaghayi, and Marx [6] and, if we perform a series of bypass operations, the result does not depend on their order.
Lemma 3.6. Let I= (G,T, p) andX⊆V(G)be a subset of nonterminals ofG.
Let I = (G,T, p)be obtained from I by bypassing all vertices of X in an arbitrary order. Then (u, v)∈E(G)for u, v∈V(G) =V(G)\X if and only if there exists a
uv-path in Gwith internal vertices fromX (possibly consisting only of an arc(u, v)). In particular,Idoes not depend on the order in which the vertices ofX are bypassed.
Proof. We perform induction with respect to the size of the set X. For X =∅ the lemma is trivial.
LetI= (G,T, p) be an instance obtained by bypassing all vertices ofX\{w}in
I in an arbitrary order for somew∈X. Takeu, v∈V(G) =V(G)\X. Assume first that (u, v)∈E(G). By the definition of bypassing, (u, v)∈E(G) or (u, w),(w, v)∈
E(G). In the first case there exists auv-path inGwith internal vertices fromX\{w} by the induction hypothesis. In the second case, by the induction hypothesis, there exist auw-path and awv-path inG, both with internal vertices fromX\ {w}; their concatenation is the desireduv-path (recall thatGis acyclic).
In the other direction, let P be auv-path in Gwith internal vertices inX. Ifw does not lie on P, by the induction hypothesis (u, v)∈E(G). Otherwise, P splits
into auw-path and awv-path, both with internal vertices inX\{w}. By the induction hypothesis (u, w),(w, v)∈E(G). By the definition of bypassing, (u, v)∈E(G) and the lemma is proved.
3.2. Degree reduction. We now introduce the second main tool used in the algorithm (the first one being the source shadow reduction of Lemma 2.11). In an instance (G,T, p), letBi be the si−ti mincut closest to si and let Z be a solution. If we know that a vti-path survives in G\Z for some v ∈Bi, we may add an arc (v, ti) and then bypass the vertexv, strictly increasing the value cutG(si, ti) (and thus decreasing the potential) by Lemma 2.6. Therefore, we can branch: we either guess the pair (i, v) or guess that none such exist; in the latter branch we do not decrease potential but instead we may modify the set of arcs incident to the sources to get some structure, as formalized in the following definition.
Definition 3.7 (degree-reduced graph). For a Multicut in DAGsinstance
(G,T, p)thedegree-reducedgraphG∗is a graph constructed as follows. For1≤i≤r, let Bi be the si−ti mincut closest to si. We start with V(G∗) = V(G), E(G∗) =
E(G\Ts) and then, for each1≤i≤r, we add an arc (s
i, v)for all v∈Bi and for
allv∈1≤i≤rBi for which si∈S(G, v)butv is not reachable fromBi inG. The following two lemmata formalize the properties of the degree-reduced graph and the aforementioned branching step. Recall that we assume that each vertexsi (ti) has in- (out-) degree zero.
Lemma 3.8 (properties of the degree-reduced graph). For any Multicut in DAGs instance I = (G,T, p) and the degree-reduced graph G∗ of I, the following
holds:
1. |NG+∗(Ts)| ≤rp.
2. For each 1≤i≤r,Bi is thesi−ti mincut closest tosi inG∗.
3. φ(I) =φ(I), where I= (G∗,T, p).
4. Z ⊆V(G) is a multicut in (G∗,T) if and only if Z is a multicut in (G,T)
satisfying the following property: for each 1 ≤ i ≤ r, for eachv ∈ Bi, the vertexv is either inZ orZ is anv−ti separator; in particular, I is a YES instance if and only ifI is a YES instance that admits a solution satisfying the above property.
5. For eachv∈V(G)we haveS(G∗, v)⊆S(G, v); moreover, if(si, v)is an arc inG∗ for some1≤i≤r, thenS(G∗, v) =S(G, v).
Proof. For claim 1, note that for each 1 ≤ i ≤ r, NG+∗(si) ⊆
1≤i≤rBi and
|Bi|= cutG(si, ti)≤p.
For Claim2, we first prove thatBiis ansi−tiseparator inG∗. Assume otherwise; letP be ansiti-path inG∗ that avoidsBi. Let (si, v) be the first arc on P. By the construction ofG∗, inGthe vertexvis reachable fromsibut not fromBi. Therefore, there exists ansiv-path inG\Bi; together withP truncated bysiit gives ansiti-path inG\Bi, a contradiction.
Now note that for each 1 ≤i ≤r, there exist cutG(si, ti) siti-paths in G with pairwise disjoint interiors; each path visits a different vertex of Bi. These paths can be shortened inG∗ using arcs (si, v) forv∈Bi; thus,Bi is ansi−ti separator inG∗ of minimum size. The fact that it is an important ti−si separator in Grev follows from the fact thatBi⊆NG+∗(si).
Claim 3 follows directly from claim 2, as cutG(si, ti) = cutG∗(si, ti) for all 1 ≤
i≤r.
For claim4, letZ be a multicut in (G∗,T). Take arbitrary 1≤i≤r and letP be an arbitrarysiti-path inG. This path intersectsBi; letv be the last (closest to
ti) vertex ofBi onP. LetP∗ be ansiti-path in G∗ defined as follows: we start with the arc (si, v) and then we follow P from v to ti. As Z is a multicut in (G∗,T),Z intersectsP∗. We infer thatZ intersectsP andZ is a multicut inG. Moreover, for each 1≤i≤Bi andv∈Bi, ifv /∈Z, thenZ is a v−ti separator inG∗ (and inGas well, as GandG∗ differ only on arcs incident to the sources), as otherwiseZ would not intersect ansiti-path inG∗ that starts with the arc (si, v).
In the second direction, letZ be a multicut in (G,T) that satisfies the conditions given in claim4. LetP∗be an arbitrarysiti-path inG∗. AsBiis ansi−ti separator inG∗,P∗ intersectsBi; letv be the last (closest toti) vertex ofBi onP∗. Note that the part of the pathP∗from vtoti(denote it by Pv) is present also in the graph G. By the properties ofZ, v ∈Z or Z intersects Pv. Thus Z intersects P∗ and Z is a multicut in (G∗,T).
To see the first part of claim5note that if (si, v) is an arc inG∗, thensi∈S(G, v): clearly this is true for v ∈ Bi, and otherwise si ∈ S(G, v) is one of the conditions required to add arc (si, v). The second part follows directly from the construction: if (si, v) is an arc in G∗, then v∈Bi for some 1≤i ≤r. Ifsi ∈S(G, v), then either
vis reachable from some vertex ofBi inG∗ or the arc (si, v) is present inG∗.
We note that in the definition of the degree-reduced graph, the arcs between a source si and vertices in Bi for i = i are added only to ensure claim 5. For the remaining claims, as well as the branching described at the beginning of the section (formalized in the subsequent lemma) it would suffice to add only arcs (si, v) for 1≤i≤randv∈Bi.
Lemma 3.9. There exists an algorithm that, given a Multicut in DAGs
in-stance I = (G,T, p), in polynomial time generates a sequence of instances (Ij = (Gj,Tj, pj))dj=1 satisfying the following properties. LetI0= (G∗,T, p);
1. if Z is a multicut in Ij for some 0 ≤ j ≤ d, then Z ⊆ V(G) and Z is a multicut inI too;
2. for any multicutZ in I, there exists 0≤j ≤d such thatZ is a multicut in Ij too;
3. for each1≤j≤d,pj=p,Tj=T andφ(Ij)< φ(I);
4. d≤rp.
Proof. LetBibe as in Definition3.7. Informally speaking, we guess an index 1≤
i≤rand a vertexv∈Bisuch thattiis reachable fromvinG\Z, whereZis a solution toI(in particular,v /∈Z). If we have suchv, we can add an arc (v, ti) and then bypass
ti; by the choice ofBiand Lemma2.6, the value cut(si, ti) strictly increases during this operation. The last branch—where such a choice (i, v) does not exists—corresponds to the degree-reduced graphG∗. We now proceed to the formal arguments.
For 1≤i≤randv∈Biwe define the graphGi,vas follows: we first add an arc (v, ti) toGand then bypass the vertexv. We now apply Lemma2.6forti−sicuts in the graphGrev: Bi is the unique minimum size important ti−si separator, v∈Bi, and Grevi,v contains the same set of vertices and a superset of arcs of the graph G from the statement of the lemma. Therefore cutGi,v(si, ti)>cutG(si, ti). Moreover, cutGi,v(si, ti) ≥ cutG(si, ti) for i = i, as adding an arc and bypassing a vertex
cannot decrease the size of the minimum separator. Thereforeφ((Gi,v,T, p))< φ(I); we output (Gi,v,T, p) as one of the output instancesIj. Clearly,d=ri=1|Bi| ≤rp. To finish the proof of the lemma we need to show the equivalence stated in the first two points of the statement.
In one direction, note that as the graphsGi,v are constructed from Gby adding an arc and bypassing a vertex, any multicut in (Gi,v,T) is a multicut in (G,T) as well. Moreover, by Lemma3.8, claim4, any multicut ofI0is a multicut ofI as well.
In the other direction, letZ be a solution toI. Consider two cases. First assume that there exists 1≤i≤randv∈Bisuch thatv /∈ZandZisnotav−ti separator. As Z is a multicut in (G,T), Z is a si−v separator in G. Therefore Z is also a multicut in a graph Gwith the arc (v, ti) added. As v /∈ Z, by Lemma 3.5, Z is a multicut in (Gi,v,T). In the second case, if for each 1≤i≤rand v ∈Bi, we have
v∈Z orZ is av−ti separator inG, we conclude thatZ is a multicut in (G∗,T) by Lemma3.8, claim4.
3.3. Overview on the branching step. In order to prove Theorem 1.1, we show the following lemma that encapsulates a single branching step of the algorithm.
Lemma 3.10. There exists an algorithm that, given a Multicut in DAGs
instance I = (G,T, p) with |T |=r, in time O∗(2r+O(p2))either correctly concludes that I is a NO instance or computes a sequence of instances (Ij = (Gj,Tj, pj))dj=1
such that
1. I is a YES instance if and only if at least one instanceIj is a YES instance;
2. for each1≤j≤d,V(Gj)⊆V(G), pj ≤p,Tj=T, andφ(Ij)< φ(I);
3. d≤2r+O(p2)rplog|V(G)|.
The algorithm of Theorem1.1applies Lemma3.10and solves the output instances recursively.
Proof of Theorem 1.1. Let I = (G,T, p) be a Multicut in DAGs instance.
Clearly, ifφ(I)<0, then cut(si, ti)> pfor some 1≤i≤r and the instance is a NO instance. Otherwise, we apply Lemma3.10and solve the output instances recursively. Note that the potential of I is an integer bounded by (r+ 1)p; thus the search tree of the algorithm has depth at most (r+ 1)p. Using a simple fact that fork, n >1 we have
logkn= 2klog logn≤232k3/2+13(log logn)3 = 223k3/2no(1),
we obtain that the number of leaves of the search tree is bounded by
2r+O(p2)rplog|V(G)|
(r+1)p
= 2O(r2p)·2O(rp3)·2O(r3/2p3/2)|V(G)|o(1)
=O∗(2O(rp(r+p2))).
The last equality follows from the fact thatr3/2p3/2≤r2p+rp3.
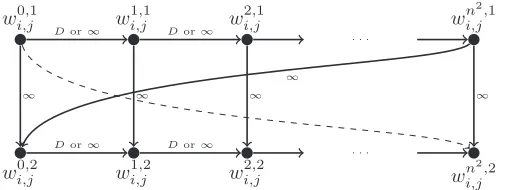
In rough overview of the proof of Lemma3.10, we describe a sequence of steps, as illustrated in Figure 1, where in each step, either the potential of the instance is decreased or more structure is forced onto the instance. For example, consider Lemma 3.9. The result is a branching into polynomially many branches, where in every branch but one the potential strictly decreases, and in the remaining branch, the degrees of the source terminals are bounded. Thus we may treat this step as “creating” a degree-reduced instance. The ultimate goal is to pin down a set of not too many vertices, at least one of which is guaranteed to be deleted in an optimal solution. In total, the entire process can be seen as producing somef(p, r) branches with new instances, with a strictly decreased potential in each branch.
In somewhat more detail, let Z be the lex-min solution to I. To illustrate the principles, consider first a single terminals∈Ts, and assume that we know (or have guessed) that there is a vertex v ∈ Z such that S(G, v) = {s}. Let us suppose that V(G,{s}) is too large to branch on directly; we reduce its size by a sequence of modifications. We first observe that for everyv∈V(G,{s}) withv /∈Z, eithers
Fig. 1.A summary of one branching step.
reaches v in G\Z or v is in source shadow ofZ. Lemma2.11lets us guess a setA which contains all vertices of the latter type; we apply this lemma, bypass the vertices
A, and assume in what follows that everyv ∈V(G,{s}) is either contained in Z or reached bysin G\Z.
The next observation is that under this assumption, we may (1) add an arc sv for everyv∈V(G,{s}), and (2) remove every arcuv whereu, v∈V(G,{s}). It can be verified that this preserves Z as a (lex-min) solution, without creating any new
[image:13.612.96.415.92.587.2]