http://wrap.warwick.ac.uk
Lockerby, Duncan A., Patronis, Alexander, Borg, Matthew K. and Reese, Jason M..
(2014) Asynchronous coupling of hybrid models for efficient simulation of multiscale
systems. Journal of Computational Physics, 284 . pp. 261-272.
Permanent WRAP url:
http://wrap.warwick.ac.uk/77101
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work of researchers of the
University of Warwick available open access under the following conditions.
This article is made available under the Creative Commons Attribution 4.0 International
license (CC BY 4.0) and may be reused according to the conditions of the license. For
more details see:
http://creativecommons.org/licenses/by/4.0/
A note on versions:
The version presented in WRAP is the published version, or, version of record, and may
be cited as it appears here.
Contents lists available atScienceDirect
Journal
of
Computational
Physics
www.elsevier.com/locate/jcp
Asynchronous
coupling
of
hybrid
models
for
efficient
simulation
of
multiscale
systems
Duncan A. Lockerby
a,
∗
,
Alexander Patronis
a,
Matthew K. Borg
b,
Jason M. Reese
caSchoolofEngineering,UniversityofWarwick,CoventryCV47AL,UK
bDepartmentofMechanical&AerospaceEngineering,UniversityofStrathclyde,GlasgowG11XJ,UK cSchoolofEngineering,UniversityofEdinburgh,EdinburghEH93JL,UK
a
r
t
i
c
l
e
i
n
f
o
a
b
s
t
r
a
c
t
Articlehistory:
Received6August2014
Receivedinrevisedform16December2014 Accepted20December2014
Availableonline24December2014
Keywords:
Multiscalesimulations Unsteadymicro/nanoflows Hybridmethods Scaleseparation Rarefiedgasdynamics
Wepresent anewcouplingapproachforthetimeadvancementofmulti-physicsmodels of multiscale systems. This extendsthe method ofE et al. (2009) [5] to dealwith an arbitrary number of models. Coupling is performed asynchronously, with each model being assigned its own timestep size.This enables accurate longtimescale predictions to bemadeatthe computational costof theshort timescale simulation.We proposea methodforselectingappropriatetimestepsizesbasedonthedegree ofscaleseparation thatexists betweenmodels.Anumber ofexampleapplicationsare used fortestingand benchmarking, including a comparison with experimental data of a thermally driven rarefiedgasflowinamicrocapillary.Themultiscalesimulationresultsareinveryclose agreementwiththeexperimentaldata,butareproducedalmost50,000timesfasterthan fromaconventionally-coupledsimulation.
©2014TheAuthors.PublishedbyElsevierInc.ThisisanopenaccessarticleundertheCC BYlicense(http://creativecommons.org/licenses/by/4.0/).
1. Introduction
Amulti-physicsdescription ofa multiscalesystemisoftenreferredto asa ‘hybrid’model.Influid dynamics,a typical hybridcombines amolecular treatment(a‘micro’model)witha continuum-fluidone(a‘macro’ model),withtheaimof obtaining theaccuracy oftheformer withtheefficiencyofthe latter[1–4].Themicro andmacromodelsgenerallyhave characteristictimescalesthatareverydifferent,whichmeansthattime-accuratesimulationscanbeextremelychallenging: thesizeofthetimesteprequiredtomakethemicromodelstableandaccurateissosmallthatsimulationsoversignificant macro-scaletime periodsareintractable.Ifthesystemis‘scale-separated’,aphysical(asdistinctfromnumerical) approxi-mationcanbemadethatenablesthecoupledmodelstoadvanceatdifferentrates(asynchronously)withnegligiblepenalty onmacro-scaleaccuracy.Eetal.[5]werethefirsttointroduceandimplementthisconceptinatime-steppingmethodfor coupledsystems,referredtointheclassificationofLockerbyetal.[6]asacontinuousasynchronous(CA)scheme (‘contin-uous’sincethemicroandmacromodelsadvancewithoutinterruption[5]).Inthispaperweextendthisideatomultiscale systemscomprisinganarbitrarynumberofcoupledmodels.
*
Correspondingauthor.E-mailaddress:[email protected](D.A. Lockerby).
http://dx.doi.org/10.1016/j.jcp.2014.12.035
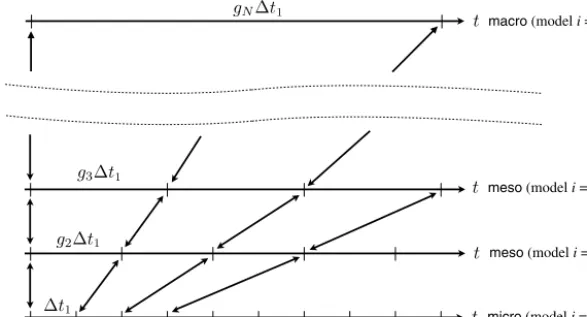
Fig. 1.The continuous asynchronous (CA) coupling scheme extended to multi-model multiscale systems.
2. Extensiontomulti-modelsystems
WeconsideranN-modeltimescale-separatedsystem,wheretheithmodelhasacharacteristictimescaleTi,andindexing isorderedsuchthat
Ti
≤
Ti+1 fori=
1, . . . ,
N−
1.
(1)Modeli
=
1 isthemicromodelandi=
N isthemacromodel;modelsi=
2 toi=
N−
1 are‘meso’models.Thedegreeof scaleseparation Si betweenmodeli andi+
1 isSi
=
Ti+1Ti
≥
Stol
,
(2)wherethetolerance Stolrequireseachdistinctmodelofthesystemtobescaleseparatedfromeveryothertosomedegree,
for example, Stol
=
O
(
10)
. If this condition is not met, the two models are treated as one, and coupling is performedconventionally.
Ingeneraleachmodelcanbeconsideredtohaveitsowntimevariable(ti),andberepresentedby d Xi
dti
=
F
i X(
ti)
,
(3)where Xi are the set of variables of the ith model, and
F
i is some function of the complete system’s variables, X=
{
X1,
X2,
. . . ,
XN}
. It is important to make clearthe distinction between the characteristic timescale ofthe ith model in isolation(Ti)andthetimescaleofitsvariableswithinthecoupledsystem;theyare,potentially,completelydifferent.Tosolvethissetofmodels,theindependenttimevariablesmustberelatedtoeachother.Ifalltimevariablesareequal (i.e.t
=
t1...N) thesystemisconventionallycoupled.However, wecan advancemodelsatdifferentrateswiththephysical modificationt1
=
t2/
g2= · · · =
tN/
gN,
(4)where gi is therate that the ith model advances relative to the micro model. Thisapproximation provides a means to exchangefinetimescaleresolutionforlongtimescalepredictions,andtheextenttowhichitisvaliddependsonthedegree ofscaleseparationbetweenmodels,i.e.onthemagnitudeof Si.Forcoupledmodels thatarehighly scaleseparated(Si
>
Stol),thesmaller-scalemodelwillremainquasi-equilibrated tothedynamicsofthelarger-scalemodeldespitethephysical
modification, and so behave similarly to as in the unmodifiedsystem. The aim is thus to represent the scale-separated system(
>
Stol) withonethatisless,butstillsignificantly,scaleseparated(=
Stol):thisishowacceptablevaluesofgi are determined(seebelowforthespecificprocedure).Detailedanalysesoftheerrorassociatedwiththisphysicalapproximation foratwo-modelsystemaregiveninEetal.[5]andLockerbyetal.[6].Fig. 1 provides an illustrationofa numericalimplementationofEq. (4)usingdifferenttimestep sizes foreach model, whileexchangingvariablesasifthetimestepswereequivalent(thisisasynchronouscoupling).Thetimestepoftheithmodel is
ti
=
git1
,
(5)where
t1 isthemicromodeltimestep.
Fig. 2.A coupled mass–spring system.
1. ThephysicalapproximationofEq.(4)representsaveryscale-separatedsystembyonethatisless,butstilltoadegree, scaleseparated(i.e.hasascaleseparationofStol).Thisplacesanupperlimitontheamountatimestep ofonemodel
canbeincreasedrelativetoanother:
ti
≤
Si−1Stol
ti−1
.
2. Thenumericalaccuracyissatisfactoryandstabilityguaranteedforeachindividualmodel:
ti
≤
ti,max
,
where
ti,maxisanestimationofthemaximumtimestepthatispermissibleforeachmodel.
Basedontheseconstraintswecansetthetimestepofeachmodelrecursively:
ti
=
minti,max
;
Si−1
Stol
ti−1
,
fori=
2, . . . ,
N,
(6)where
t1
=
t1,max.
Wenowconsideraseriesofexamples.TheexamplesofSections3–5areusedtoillustratetheeffectiveness,challenges, andshortcomingsofemployingthephysicalapproximationinEq.(4)andapplyingtimesteppingofEq.(6);theexampleof Section6providesademonstrationofanapplicationtohybridcontinuum-molecularmodelling.Note,thereare arangeof numericalmethodsthatcouldbeappliedtothenumerically-stiffsystemsofSections3–5,butwhichcannotbeappliedto thehybridexampleofSection6.
3. Example1:Asimplemass–springsystem
Aserialmass–spring systemwith N massesandN
+
1 springsisshowninFig. 2.Thegoverningequationsfortheith modelare d dt vi xi=
1mi
(
ki(
xi−1−
xi)
+
ki+1(
xi+1−
xi))
vi,
(7)wherexi and vi arethedisplacement andvelocity oftheithmass(mi)andki isthe ithspringconstant. Acharacteristic timescaleforeachmodelcanbeobtainedfromitsnaturalperiodinisolation:
Ti
=
2π
mi ki+
ki+1.
(8)InthisexampleN
=
5,thespringconstantsareequal,andthe(
i+
1)
thmassis900×
heavierthantheithmass,suchthatTi+1
=
30Ti.
(9)Allmodelsarethussignificantlyscale-separated.1
Thecompletesystemofequationsissolvedusingthemidpointmethod(asecond-orderRunge–Kuttascheme),butwith timestepsforeachmodelchosenaccordingtoEq.(6),with
ti,max
=
Ti/
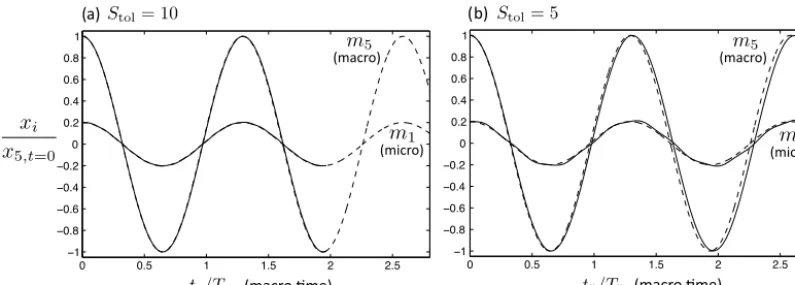
100.Inthefirstcase,theinitialdisplacementsxi,t=0 arechosensuchthat,whenthemassesarereleasedfromrest,onlythe
slowest eigenmode of thesystem isexcited. Fig. 3(a) showsthe response ofthe lightest (m1) and heaviest (m5) masses
governedbythemicroandmacromodels,respectively;theanalyticaleigenvaluesolution(thedashedline)is indistinguish-ablefromthe multiscalesolution.Fig. 3(b)showsthesolution using Stol
=
5, whichplaces alessconservativerestrictiononthebalancebetweenaccuracyandefficiency.ForStol=10,themodeladvances81
×
fasterthanifstandard(synchronous)couplingwereused;forStol
=
5 itadvances1296×
faster.The massesare now initiallydisplaced an equal distanceand thenreleased fromrest; thisexcitesall eigenmodes, to a degree. Fig. 4 shows: (a) the response of a meso model (i
=
3) and(b) the response of the macromodel (i=
5,the heaviestmass),forStol=
5.Themacrodescriptionisaccurate,whileforthemesomodelonlythelowfrequencyeigenmodeisaccuratelycaptured.Thisexampleillustrates thefundamentaltrade-off requiredinmultiscaling:efficiencyinpredicting macrovariationscanbedramaticallyincreased,butattheexpenseofmicro/mesoscaleresolution.
Fig. 3. Normaliseddisplacement responseofthelightestand heaviestmasses(m1 andm5, respectively)toexcitationofthe slowesteigenmode.The
[image:5.561.74.475.234.376.2]multiscaleresult(—)andananalyticaleigenvaluesolution(– –).
Fig. 4.Normaliseddisplacementresponseof(a)themedianand(b)theheaviestmasses(m3 andm5,respectively)toanequalinitialdisplacement.The
multiscaleresult(—)andananalyticaleigenvaluesolution(– –).
4. Example 2:ALotka–Volterrasystem
TheLotka–Volterraequations,invariousforms,havebeenappliedtoanextremelydiverserangeofproblems,spanning economics [7], biology [8]and chemistry [9]. Originating fromthe analysisof auto-catalytic chemical reactions [9], the equations arenowmostcommonlyusedto studythe populationdynamicsofcompetingbiologicalsystems,whichis the exampleweconsiderhere.
Thepopulationgrowthrateofaspeciesina(sequential)foodchainisasfollows:
dyi
dt
=
yi(
−
ri+
piyi+1−
qiyi−1),
(10) where yi isthepopulationsizeoftheithspecies, riistheintrinsicdeathrate(intheabsenceofanypreyorpredator), pi is thepopulationgrowthrateduetothe consumptionoflowerspeciesinthefoodchain,andqi isthedeathratedueto predationfromhigherspeciesinthefoodchain.Theintrinsicdeathrateofeachspeciesdefinesacharacteristictimescalefor that speciesmodel(ri=
1/
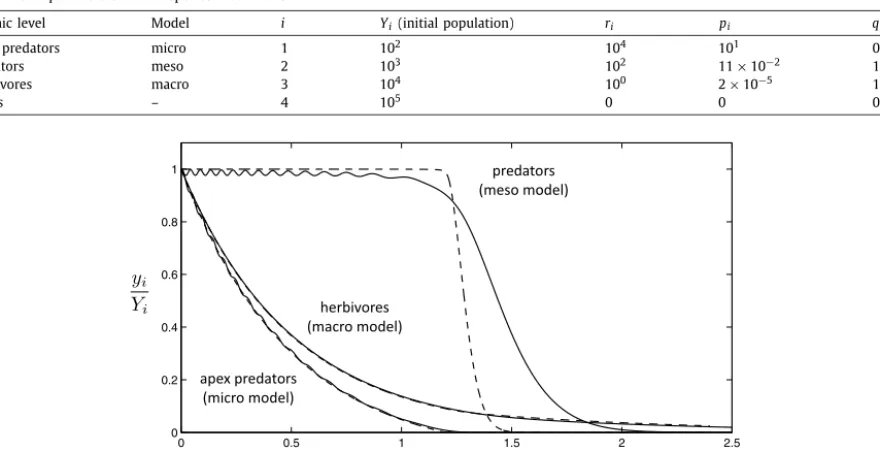
Ti),andwhichclassifiesthemodelinthemacro-to-microhierarchy;thisrateincreasesmoving upthefoodchain.Thus,theApexPredator,atthetopofthefoodchain,hasthehighestintrinsicdeathrate(intheabsence ofprey),anditspopulationsize, y1,isgovernedbythemicromodel.Table 1 gives parameters for a food-chain example consistingof four species. For the initial population sizes Yi the ecosystem is in equilibrium, and the numbers ofeach specieswill remain constant. If, however, all plants are removed (Y4
=
0),thepopulationsoftheremainingspecieswilleventuallyreducetoextinction.Fig. 5showsthepopulationresponseofeachspeciesintheecosystem,aspredictedbyastandardnumericalsolution(thedashedline,usedasabenchmark)and themultiscaleapproachusingStol
=
10 (thesolidline).AsinSection3,timeintegrationisperformedusingasecond-orderRunge–Kuttamethod,withtimestepsforeach modelchosenaccordingtoEq.(6),with
ti,max
=
Ti/
5.Forthebenchmark solutionti
=
t1,max.
ThefirstobservationisthattheslowlyvaryingpopulationsizesoftheApexPredatorsandtheHerbivoresarepredicted veryaccuratelybythemultiscalescheme,whichis100
×
computationallyfasterthanthebenchmarksolution.Fig. 6shows the macromodelpredictionusinglessconservativetolerances ontheminimumacceptablescale separation,i.e. Stol=
2.
5Table 1
Lotka–Volterraparametersfora4-speciesfoodchain.
Trophic level Model i Yi(initial population) ri pi qi
Apex predators micro 1 102 104 101 0
Predators meso 2 103 102 11×10−2 101
Herbivores macro 3 104 100 2×10−5 10−3
[image:6.561.151.393.339.498.2]Plants – 4 105 0 0 0
Fig. 5.NormalisedpopulationresponsetotheinstantaneousremovalofPlants.Themultiscaleresult(—)andaconventional(benchmark)numerical solu-tion (– –).
Fig. 6.NormalisedHerbivorepopulationresponsetotheinstantaneousremovalofPlants:Stol=10 (—), Stol=5 (– –),Stol=2.5 (–·–),andabenchmark
numericalsolution(•).Note,forclarity,thebenchmarksolutionisnotplottedateverytimestep.
solutionconvergestothenumericalbenchmarkasStol isincreased;Stol
=
10 appearstoprovideaveryaccurateresultforthemacrovariable.
However, compared to theother species, thePredators’ population decline israpid,and occursaftersome delay.The delayoccursbecause,initially,thePredators’preyandthePredators’predatorsarebothreducing–onlywhentheirpreyis significantlydiminishedisthereamajorreductioninPredatornumbers.Themultiscaleapproachdoesnotcapture,withany fidelity,theseshorterscalephenomena,andactuallyintroduceserroneousshorttimescaleoscillations.Thisagainhighlights that exploitingscale separationaffordsvery efficientpredictiononlarge timescales,butatthe expenseoffinertimescale resolution.Note,inthiscase,themicromodelpredictionisverygood,becausetheshortscaleresponseonlymanifestsitself inthemesomodel’svariable.
5. Example3:Alubricationsystem
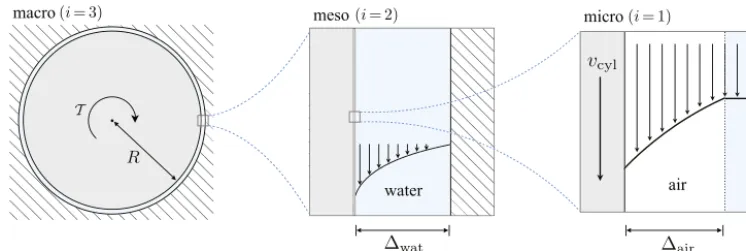
Fig. 7.Schematic of a liquid journal bearing with a lubricating air layer.
surfacetopologythat,whensubmergedinwater,combinetotrapairpocketsonthesurface.Suchcoatingshaveapplications inmarinedragreduction[10,11]andforself-cleaningsurfaces[12].Inthecontextofmultiscalemodellingtheyarerelevant becauseoftheverydifferentscalesassociatedwiththeairlayer,externalwater,andthebody/vehicle.
The bearingexampleofthissection consistsofasteelcylinder,ofradius R
=
10 cm,towhichisappliedanoscillatory torque,T
.Thecylinderrotateswithin a fixedouter cylindercontaining water;the surfaceofthe innercylinderiscoated withan airlayerofthicknessair
=
1 μm; andtheannular thickness ofwateriswat
=
0.
1 mm (i.e. Rwat
air);
seeFig. 7.
Thelow-speed,unsteady,incompressibleNavier–Stokesequationsprovidemodelsfortheairlayerandthewater(i.e.the microandmesomodels,i
=
1 andi=
2,respectively):∂
vair∂
t1=
μ
airρ
air∂
2vair∂
r2(
micro)
(11)and
∂
vwat∂
t2=
μ
watρ
wat∂
2vwat∂
r2(
meso)
(12)where r is the radial coordinate fromthe cylinder centre, v istangential velocity,
μ
is dynamic viscosity,ρ
is density, andthesubscripts‘air’and‘wat’denotetherespectivefluids. Giventhat Rwat
air,thecurvatureofthegeometry
can beneglected.The microandmeso modelsarecoupledbytherequirementfortheshearstressandthevelocitytobe continuousattheair–waterinterface(assumingnoslip):
μ
air dvairdr
r=rint
=
μ
watdvwat dr
r=rint
,
(13)and
vair
|
r=rint=
vwat|
r=rint,
(14)wheretheradialpositionoftheair–waterinterfaceisrint
=
R+
air.Thewateratthewalloftheoutercylinderisstationary
(i.e.thereisnoslip).
Newton’ssecondlawdeterminestheevolutionofthetangential velocityoftheinnercylindersurface (vcyl);thisisthe
macromodel(i
=
3):∂
vcyl∂
t3=
R I
2
π
L R2μ
air∂
vair∂
rr=R
+
T
(
t3)
(
macro)
(15)where L isthe lengthofthebearing(into thepage)and Iisthemomentofinertia ofthecylinder.The appliedtorqueis
T
=
Asin(ω
t3)
,whereω
istheangularfrequencyand Aistheamplitude.Themacromodeliscoupledtothemicromodelthrough shear stress inthe airlayer atthe cylinderwall (i.e.the termin parenthesisin Eq.(15)) and viano-slip atthe cylinder–airinterface:
vcyl
=
vair|
r=R.
(16)SeeAppendix Aforvaluesofthephysicalparametersusedinthisexample.
The characteristictimescalesestimatedforeach modelarethe viscoustimescale (forthetwo fluids),andafractionof thetorqueperiod(forthecylinder):
T1
=
ρ
air2air
μ
air;
T2
=
ρ
wat2wat
μ
wat;
T3
=
π
Fig. 8.Tangentialvelocityv[m s−1]developinginmacrotimet
3[s]forthecylinderwallandtheair–waterinterface.Responsetoanoscillatorycylinder
torque.Stol=20 (•),Stol=10 (—),andStol=5 (– –).Note,forclarity,theStol=20 resultisnotplottedateverytimestep.
In thisexample, the disparity intimescales is vast: T3
/
T1∼
109.For consistency withprevious examples, the midpointmethod is used for time-advancement, with timestep sizes determined by Eq. (6)(see Appendix A for
tmax,i). Spatial discretisationofthefluidmodels,i.e.ofEqs.(11)–(12),isperformedusingasecond-ordercentral-differenceapproximation; forthisillustrativeexample,only10gridpointsareusedineachfluidlayer(afinermeshdoesnotsubstantiallychangethe results).
Fig. 8showsthe variationofthe velocityofthe cylinderwall,andthevelocity oftheair–water interface, withmacro time. The velocity of the cylinder wall is almost 50% higher than that of the air–liquid interface (which would be the approximatevelocityofthecylinderwallifnoairlayerwerepresent);thedragcoefficientofthecylinderinwaterhasbeen reducedbyalmost50%duetothepresenceofthethinairlayer.
Hereitisnotpracticaltobenchmarkthemultiscaleresultsagainstaconventionalnumericalsolution(i.e.onewithequal timestepsizes),becauseofthehighcomputationalcosttoobtainthelatter.Instead,andwhatmustbedoneinpractice,is toshowtheindependenceofthemultiscaleresulttoincreasesin Stol.Thisisakintoagrid-dependencystudy–settinga
larger Stol hastheeffectofreducingthedifferencebetweentimestepsizes.
Fig. 8showsresultsfor Stol
=
5,
10,
and 20;theresultsfor Stol=
10 and 20 arebarelydistinguishable,indicatingthatStol
=
5 isafairprediction,andStol=
10 isaveryaccurateone.Thecomputationalspeed-upaffordedbytheasynchronoustimestep coupling is in this caseextremely high:
×
9.
5·
107 (for Stol
=
5);×
1.
2·
107 (for Stol=
10); and×
3·
106 (forStol
=
20).Nowweconsiderthesuddenapplicationofaconstanttorque,
T
=
1,tothestationarysystem.Thiscasehighlightsthe potentialdifficultiesinidentifyingcharacteristictimescales.Themacromodel,Eq.(15),doesnothaveaninherenttimescale intheabsenceofanoscillatorytorque.Inotherwords,inisolation(i.e.withoutairorwater),thecylinderwouldperpetually accelerate inresponseto theconstant torque.In thesecircumstancessome estimate ofthe timescaleof themodelwhen interacting with others, is needed. Here we achieve this withan approximation of the acceleration and velocity of the cylinderwallintermsoftheair-layershearstress,andcombinethemtogetatimescale.Intheabsenceofanappliedtorque,theaccelerationofthecylinderwallswillbeproportionaltotheshearstressinthe airlayeratthewall(
τ
wall),andinverselyproportionaltothemomentofinertiaofthecylinder(seeEq.(15)):∂
vcyl∂
t∝
L R3
τ
wallI
.
(18)Ifwe assume a linearvelocity profile inthe airlayer, thevelocity of thecylinder wallwill be proportional tothe shear stressandtheair-layerthickness,butinverselyproportionaltothedynamicviscosity,i.e.
vcyl
∝
τ
wallair
μ
air.
(19)DivisionofEq.(19)by(18)givesacharacteristictimescalethatwecanuseinoursimulation:
T3
=
air
ρ
cylRμ
air,
(20)where
ρ
cyl isthedensityof thesteelcylinder.With theexception ofthismacrotimescale T3,andt3,max
=
T3/
200,allotherparametersarethesameasabove.
Fig. 9showsthevelocityresponseofthecylinderwallandair–waterinterfacetothesuddenly-appliedconstanttorque. Again,calculationsareperformedusingStol
=
5,
10,
and 20,withStol=
10 providingaresultthatappearstobeinsensitiveFig. 9.Tangentialvelocityv[m s−1]developingmacrotimet
3[s]forthecylinderwallandtheair–waterinterface.Responsetoasuddenly-appliedconstant
cylindertorque.Stol=20 (•),Stol=10 (—),andStol=5 (– –).Note,forclarity,theStol=20 resultisnotplottedateverytimestep.
timescale predictedby Eq.(20), T3
=
78.
5 s,is reasonable giventhe observedtimescales. Evenso,if thispredictionhadbeen much different, the main consequence wouldbe that the Stol-independence thresholdwould be different, and the
dependencystudymighthaverequiredadditionalsimulationstofindthatthreshold.
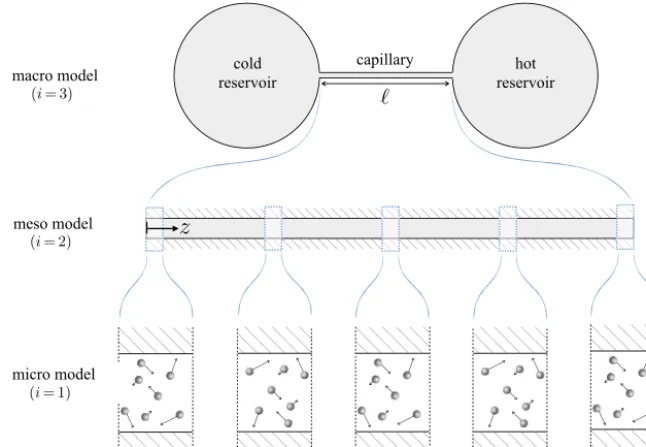
6. Example4:AKnudsencompressor
Finally, weconsider therarefiedgas flowbetweentwo reservoirs, heldatdifferent temperatures,connectedby athin cylindricalcapillary:asingle-stageKnudsencompressor,seeFig. 10.Rarefactioneffectsinthecapillarytransportgasfrom the cold to the hot reservoir; thiscounter-intuitive phenomenon is thermal transpiration(sometimes known asthermal creep)andwasfirstobservedbyReynolds[13].TheconfigurationshowninFig. 10wasconstructedbyRojas-Cárdenasetal. [14] inordertostudythetransientbehaviourofthermaltranspirationinaclosedsystem;someoftheirexperimentaldata ispresentedbelow.
In terms ofsimulation, thissystemcannot be modelled usingstandard Navier–Stokes equationsand boundary condi-tions, sincethermaltranspirationisathermodynamicnon-equilibriumphenomenon[15,16].Ontheother hand,anaccurate gas-kinetictreatmentwouldbecomputationalintractableovertheentiredomain.Totacklethis,wedecomposethesystem intothreecoupledmodels,applyingtheappropriatemodellingassumptionstoeach:thereservoirmodel(macro,i
=
3);the capillarymodel(meso,i=
2);andthegas-kineticmodel(micro,i=
1);seeFig. 10.Themacromodeldefiningthereservoir pressuresisobtainedfrommassconservationandbyassuminganidealgas:dpc
dt3
= −
R
θ
cVc
˙
m(z=0)
,
dph
dt3
= −
θ
hθ
c Vc Vhdpc
dt3
,
(21)where pispressure,
R
isthegasconstant,θ
istemperature, V isthereservoirvolume,m˙
isthemassflowratealongthe capillary,zisdistancealongthecapillaryfromthecoldtohotreservoir,andthesubscriptsc andhdenotethecoldandhot reservoirs,respectively.Note,hereweassumethatthereisnosignificantchangeinmassofgaswithinthecapillary,though thiscaneasilybeaccountedforifnecessary.The meso modelforthehigh-aspect-ratio capillaryisobtainedfromthe continuityequation integratedoverthe cross section:
∂
p∂
t2+
R
θ
A
∂
m˙
∂
z=
0,
(22)where A is the cross-sectional area of the capillary. The meso model is coupled to the macro model by the boundary conditions: p
=
pc, m˙
= ˙
m(z=0) at z=
0; and p=
ph at z=
, where is the length of the capillary. The temperature variationalongthecapillaryisprescribed(usingthesamefitasinRojas-Cárdenasetal.[14])byθ
=
θ
c+
(θ
h−
θ
c)
eαz
−
1eα−
1,
(23)where
α
isaconstant.Themicromodel,
G
,providesameanstoclosetheentiresystem,byrelatingmassflowratetopressureandtemperature:∂
m˙
∂
t1=
G
∂θ
∂
z;
∂
p∂
z;
X
Fig. 10.Schematic of a multiscale simulation strategy for the single-stage Knudsen compressor experimental configuration of Rojas-Cárdenas et al.[14].
where
X
containsinformationregardingthemolecularstructureofthegas,whichisrequiredtoaccuratelymodelthermal transpiration. Here,themicro modelG
isa spatially-distributedarray oflow-variance deviationalsimulation MonteCarlo (LVDSMC)subdomains(seeFig. 10).LV-DSMCisaparticularlyaccurateandlownoisemethodforsimulatingsmalldeviations fromequilibriuminrarefiedgasflows[17,18].Usingmicroparticle-simulationsubdomainstorepresentpointsinthemeso domain is substantially more efficient than modelling the entire channel with a single particle simulation – thisis an applicationof the Internal Multiscale Method (IMM),and readersare referred to [19–21] fora detailed description.The simulatedparticles of each (streamwise periodic)subdomain are forcedby an effectivebody force, which representsthe equivalentpressureandtemperaturegradientoccurringatthatlocationinthemesomodel(thepressureandtemperature arealsoset).Themicromodelisthuscoupledtothemesomodelbythestreamwisepressuregradient,pressure,andmass flowrateateach ofthesubdomainlocations.Forthesimulationswe presenthere, 12subdomainsareused.Foraccuracy, thederivatives inz featuringin Eqs.(22)and(24)are evaluated fromaChebyshev polynomialinterpolation of p andm˙
fromsubdomainlocationscorrespondingtoChebyshev–Gauss–Lobattopoints.
Viscousdevelopmentwithinthecross-sectionofthecapillarydefinesthecharacteristictimescaleofthemicromodel
T1
=
ρ
R2capμ
,
(25)where Rcap isthe capillaryradius and
ρ
andμ
are the average initial densityandviscosity ofthe gas.If we assume aquasi-steadyvelocityprofile(whichisonlyvalidfort
T1),characteristictimescalesofthemesoandmacromodelcanbeestimatedfromEqs.(22)and(21),respectively:
T2
=
μ
2p R2cap
,
(26)and
T3
=
μ
Vt p R4cap
,
(27)wherepistheaverageinitialpressureandVt isthetotalvolumeofthecombinedreservoirs.
TheexperimentsofRojas-Cárdenasetal.[14]wereperformedwithArgongas,aborosilicate(glass)capillaryofcircular cross-sectionwith
=
52.
7±
0.
1 mm,Rcap=
242.
5±
3 μm connectingtworeservoirsofvolume Vc=
19.
81±
0.
54 cm3andVh
=
14.
85±
0.
40 cm3,heldatθ
c=
301 K andθ
h=
372 K. Aheater appliedtothehotreservoirgeneratedatemperature distribution throughthe capillaryfittedby Eq. (23), withα
=
84.
82 m−1.Initially, thetwo reservoirs were held atfixed pressure(p=
237.
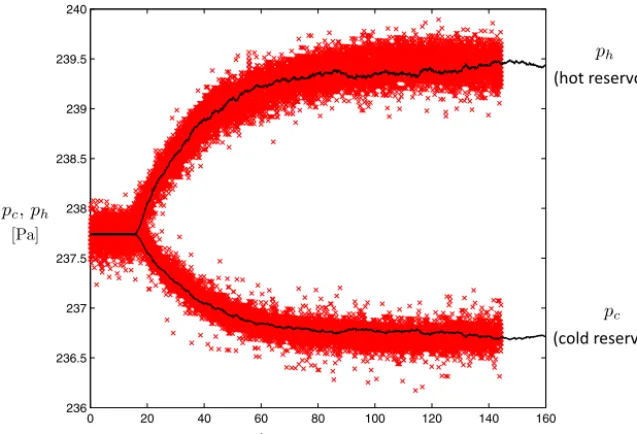
7 Pa),allowing thermaltranspirationflowtodevelop;thesystemwas thenclosed,andthepressurein thetworeservoirsallowedtoequilibrate.Note,inagasthatisnon-rarefiedtheinitialstatewouldbetheequilibriumone.Fig. 11.Comparisonofexperimentaldataandthemultiscalesolution,fortransientdevelopmentofaKnudsencompressor;aplotofreservoirpressures versustime.Bothreservoirsareheldataconstantpressureuntilapproximatelyt3=18 s,atwhichpointthereservoirsareinstantaneouslyclosedtothe
[image:11.561.137.413.318.538.2]environment.ExperimentaldataofRojas-Cárdenasetal.[14](×)andthemultiscalesimulation(—).
Fig. 12.Reservoir pressure versus time for increasing values ofStol: 10 (· · ·); 20 (– –); 30 (–·–); 40 (—).
Fig. 11showsthetransientresponseofthepressureineachreservoirafterthesystemisinstantaneouslyclosed;thereis verycloseagreementbetweentheexperimentalmeasurementsandthemultiscalesimulation.Theasymmetryofthefigure around theinitial pressureis causedbythe differentreservoirvolumes(Vc
>
Vh).The multiscaleresultisobtainedwithStol
=
10, andrequired theuse oftwelve Intel Xeon X56502.66GHz coresfor 4.13hours (wall-clock time).If thetimestepsweresetequal(i.e.aconventionalsynchronouscoupling)thesimulationwouldhavetakenover20yearsonthesame hardware. Infact, thesavingover conventionalmodellingis fargreater thanthis, ifwealso takeinto accountthesaving duetospatialmultiscalingbyusingtheIMM[19–21].
Fig. 12 showstheimpactofincreasing Stol;asimilarresultisobtainedinallcases,butwithlowernoiseathigherStol.
This highlights an important generallimitation of multiscalingwith stochastic models (e.g.LVDSMC) orinherently noisy methods (e.g. Molecular Dynamics): fewer timesteps means lesssampling, and thus morenoise. The trade-off inhybrid (continuum-particle)multiscalingcanthusbesummarised:
7. Discussionandsummary
Inthispaper wehave described howan asynchronous couplingofmultiplemodels can beused to balancefine-scale accuracywithlongtimescalepredictionsinscale-separatedsystems.Aphysicalapproximationismadethatrepresentsthe scale separatedsystemby one thatis less, butstill tosome extent,scale separated. Inthe examples presented,we have beenabletomakeverylargecomputationalsavingswithverylittlereductioninmacro-scaleaccuracy.
Inthemajorityoftheseexamples,ithasbeenpossibletoidentifyclearcharacteristictimescales,upon whichtimestep sizesforeachmodelarethen based.Inmanypracticalcases,though,suchidentificationwillnotbestraightforward. Mul-tiple time scales willbe present, andheavy relianceon crudeestimation willbe necessary. In thesecases,performing a dependencystudyon Stolisessentialforobtainingreliablepredictions.
Applyingthe schemetosets ofmodelsthat,despitehavingdisparatecharacteristictimescalesinisolation, arestrongly nonlinearly coupled, presents another issue (e.g. chaotic systems). These systems can demonstrate extreme macro-scale sensitivitytosmallscale fluctuations(i.e. arenot separable).Here,again, theminimumtestofsolution integritymust be thattheresultsareindependentbeyondathresholdStol.
Significantfuturetechnicaldevelopmentneedsaretowardscopingwithsystemsexhibitingtime-varyingdegreesofscale separation.Afullyadaptiveandautomatedscheme–onewhichdoesnotrelyonthepredictionofcharacteristictimescales ofmodels–isthenextmajorstepforward.
Acknowledgements
Thisworkis financiallysupported byEPSRCgrants EP/I011927/1,EP/K038664/1,andEP/K038621/1.Theauthorswould liketothank:MarcosRojas-Cárdenas,IrinaGraur,PierrePerrier,andJ.GilbertMéolansforprovidingtheirexperimentaldata; NicolasHadjiconstantinouforprovidingtheLVDSMCsourcecode;andCarlosDuque-Dazaforthesuggestiontoconsiderthe Lotka–Volterraequationsasanexample.
Appendix A. ParametersforsimulationsofSection5
R
=
10 cm;air
=
1 μm;wat
=
0.
1 mm;μ
air=
18.
6×
10−6 kg m−1s−1;μ
wat=
8.
9×
10−4 kg m−1s−1;ρ
air=
1
.
23 kg m−3;ρ
wat=
1000 kg m−3;ρ
cyl=
1.
23 kg m−3; L=
1 m; I=
1.
26 kg m2; f=
1.
59 mHz; A=
1 Nm;t1,max
=
T1
/
200;t2,max
=
T2/
200;t3,max
=
T3/
400.Appendix B. ParametersforsimulationsofSection6
=
52.
7 mm;Rcap=
242.
5 μm;Vc=
19.
81 cm3;Vh=
14.
85 cm3;θ
c=
301 K;θ
h=
372 K;α
=
84.
82 m−1;p=
237.
7 Pa;T1
=
9.
907 μs;T2=
4.
205 ms;T3=
47.
03 s;t1,max
=
8×
10−9 s (setbybest-practiceguidelinesforLV-DSMC);t2,max
=
T2
/
100;t3,max
=
T3/
100;12independentLV-DSMCsubdomainsare positionedonaLobattogridalongthecapillary;Onaverage
∼
10,000deviationalparticlesareusedpersubdomain.Purelydiffusereflectionisassumedatwalls.AVariableHard Sphere(VHS)modelofArgonisused;VHS diameter=
4.
17×
10−10m;VHS mass=
6.
634×
10−26kg.References
[1]W.E,B.Engquist,X.Li,W.Ren,E.Vanden-Eijnden,Heterogeneousmultiscalemethods:areview,Commun.Comput.Phys.2(2007)367–450. [2]M.Kalweit,D.Drikakis,Multiscalesimulationstrategiesandmesoscalemodellingofgasandliquidflows,IMAJ.Appl.Math.76(2011)661–671. [3]K.M.Mohamed,A.A.Mohamad,Areviewofthedevelopmentofhybridatomistic-continuummethodsfordensefluids,Microfluid.Nanofluid.8(2010)
283–302.
[4]M.K.Borg,D.A.Lockerby,J.M.Reese,Fluidsimulationswithatomisticresolution:ahybridmultiscalemethodwithfield-wisecoupling,J.Comput.Phys. 255(2013)149–165.
[5]W.E,W.Ren,E.Vanden-Eijnden,Ageneralstrategyfordesigningseamlessmultiscalemethods,J.Comput.Phys.228(2009)5437–5453.
[6]D.A.Lockerby,C.A.Duque-Daza,M.K.Borg,J.M.Reese,Time-stepcouplingforhybridsimulationsofmultiscaleflows,J.Comput.Phys.237(2013) 344–365.
[7]R.Goodwin,AGrowthCycle–Socialism,CapitalismandEconomicGrowth,C.H.Feinstein(Ed.),CambridgeUniversityPress,1967.
[8]V.Volterra,Variationsandfluctuationsofthenumberofindividualsinanimalspecieslivingtogether,J.Cons.- Cons.Perm.Int.Explor.Mer3(1926) 3–51.
[9]A.J.Lotka,Contributiontothetheoryofperiodicreactions,J.Phys.Chem.14(1910)271–274.
[10]R.J.Daniello,N.E.Waterhouse,J.P.Rothstein,Dragreductioninturbulentflowsoversuperhydrophobicsurfaces,Phys.Fluids21(2009)085103. [11]M.A.Samaha,H.V.Tafreshi,M.Gad-el-Hak,Influenceofflowonlongevityofsuperhydrophobiccoatings,Langmuir28(2012)9759–9766. [12]B.Bhushan,Y.C.Jung,K.Koch,Self-cleaningefficiencyofartificialsuperhydrophobicsurfaces,Langmuir25(2009)3240–3248.
[13]O.Reynolds,Oncertaindimensionalpropertiesofmatterinthegaseousstate.PartsIandII,Philos.Trans.R.Soc.Lond.170(1879)727–845. [14]M.Rojas-Cárdenas,I.Graur,P.Perrier,J.G.Méolans,Time-dependentexperimentalanalysisofathermaltranspirationrarefiedgasflow,Phys.Fluids25
(2013)072001.
[15]M.Gad-el-Hak(Ed.),MEMS:IntroductionandFundamentals,CRCPress,2005.
[16]J.M.Reese,M.A.Gallis,D.A.Lockerby,Newdirectionsinfluiddynamics:non-equilibriumaerodynamicandmicrosystemflows,Philos.Trans.R.Soc., Math.Phys.Eng.Sci.361(2003)2967–2988.

![Fig. 8. Tangential velocity v [m s−1] developing in macro time t3 [s] for the cylinder wall and the air–water interface](https://thumb-us.123doks.com/thumbv2/123dok_us/9543027.459194/8.561.130.412.54.215/fig-tangential-velocity-developing-macro-cylinder-water-interface.webp)
![Fig. 9. Tangential velocity v [m s−1] developing macro time t3 [s] for the cylinder wall and the air–water interface](https://thumb-us.123doks.com/thumbv2/123dok_us/9543027.459194/9.561.134.414.54.213/fig-tangential-velocity-developing-macro-cylinder-water-interface.webp)