39
DOI: 10.
Free Vibration Analysis of SVC Systems Based on Reddy-Levinson Model Using
DQM
Hadi Mohammadi Hooyeh1,* , Ali Mohammadi Hooyeh2 , Hasan Afshari3
1Department of Solid Mechanics, Faculty of mechanical Engineering, University of Eyvanekey, Garmsar/Semnan, Iran 2Department of Solid Mechanics, Faculty of mechanical Engineering, Sharif University of Technology, Tehran, Iran 3Department of Mechanical Engineering, Khomeinishahr Branch, Islamic Azad University, Khomeinishahr/Isfahan, Iran
Received 18 May 2018; revised 9 November 2019; accepted 10 November 2019; available online 22 February 2020
ABSTRACT: In this study, the free vibration analysis of smart vibration control (SVC) systems based on Reddy – Levinson model and modified strain gradient theory is developed. This system consist of a micro beam at middle and two magneto-electro-elastic (MEE) composite micro beams at top and bottom which connected by enclosing elastic medium and simulated by Winkler and Pasternak foundation. The effects of the lower MEE composite micro beam in the absence of upper MEE composite micro beam and also the effect of both MEE composite micro beams together on the dimensionless natural frequency of the middle micro beam are evaluated. It is shown that the presence of both MEE composite micro beams together have less dimensionless natural frequency than presence of lower MEE composite micro beam alone. The results of this work can be useful to analysis, design and manufacture intelligent micro-systems to hamper resonance phenomenon or as a sensor to control the dynamic stability of micro structures.
KEYWORDS: Free Vibration analysis; Reddy - Levinson model; Smart vibration control system; three micro- and micro-composite beams
INTRODUCTION
Smart vibration control systems (SVCS) due to its unique properties have attracted the attention of many the research communities. The SVCS has been widely extended in micro- and nano-scale devices and systems such as thin films atomic force microscopes (AFMS) [1-3], micro- and nanoelectro-mechanical systems (MEMS) and NEMS)[4]. Magneto electro elastic (MEE) micro and nanocomposite materials are the main components of SVCS [5-7]. MEE materials have the unique ability of converting the system energy from one form to the other (among magnetic, electric and mechanical energies) [8-9]. A literature review represents that the mechanical behavior of SVCS and MEE structural elements have been investigated by several researchers. Nonlinear vibration of a nanobeam (NB) coupled with a piezoelectric nanobeam (PNB) based on the strain gradient theory in conjunction with the Euler-Bernoulli beam model is investigated by Ghorbanpour Arani et al. [10] They considered that the PNB is subjected to an external electric voltage in thickness direction and a uniform temperature change. Their results indicated that the dimensionless frequency of NB reduces because of increasing the external electric voltage. Pisarskia et al. [11] Buckling behavior of nonlocal MEE functionally graded (FG) beams based on a higher-order beam model is represented by Ebrahimi and Barati [12]. It is obvious from their results that the magnetic and electric fields, nonlocal parameter, power-law index parameter, power-law index and slenderness ratio parameter,
*Corresponding Author Email: [email protected]
Tel.: +982177105105; Note. This manuscript was submitted on May 18, 2018; approved on November 10, 2019; published online February 22, 2020.
power-law index and slenderness ratio have significant effects on the buckling behavior of MEE-FG nanobeams. Vaezi et al. [13] obtained natural frequencies and buckling loads of a MEE simply supported microbeam under electric and magnetic potentials.
Their results revealed that by increasing of the value of length-to-thickness ratio is higher than the values of the normalized natural frequency. Nonlocal nonlinear plate model for large amplitude vibration of MEE nanoplates was presented by Farajpour et al. [14].
Kattimani and Ray [15] analyzed active damping of geometrically nonlinear vibrations of MEE-FG plates integrated with the patches of the active constrained layer damping (ACLD) treatment. They proposed the constrained viscoelastic layer of the ACLD treatment is modeled by using a Golla–Hughes–McTavish (GHM) method in time domain. Gharib et al. [16] developed the linear vibrations of a smart thin micro panel of polymeric nano-composite reinforced by the single-walled boron nitride nano-tubes (SWBNNTs) and the matrix Poly-VinyliDene Fluoride (PVDF) on an elastic substrate. Ghorbanpour Arani and his research group [17] addressed wave propagation in embedded nanocomposite polymeric piezoelectric micro plates reinforced by single-walled carbon nanotubes (SWCNTs) using viscoelastic quasi-3D sinusoidal shear deformation theory. Using Eringen’s nonlocal theory and analytical solution the dimensionless phase velocity, cut-off and escape frequencies are obtained.
40 Nomenclature
p ij
A Weighting coefficients of the pth order derivative Symmetric rotation gradient tensor
b Thickness of microbeams Electric potentials
ij
d Magnetoelectric constant l Independent material length scale
E Electric field *
l Independent material length scale
E Young’s modulus mij Higher – order stresses
F Elastic medium Infinitesimal rotation vector
h Width of microbeams
i Pyromagnetic constant
H Magnetic field Shear modulus
K Kinetic energy * Shear modulus
g
K Pasternak’s shear modulus vi Pyroelectric constant
w
K Winkler’s spring modulus Density of MEE composite micro beam
L Length of microbeams Density of micro beam
N Grid point’s number along x direction ij
Stress tensor
q Dynamic displacement vector *ij Classical stress tensor
U Strain energy (1)
ijk Higher – order stresses
k
u Displacement vector Angle of the rotation
E
V External electric Symmetric rotation gradient tensor
w Z component of the displacement vector E Variation of electric
x, y , z Components of thedisplacement Dimensionless natural frequency
Greek Symbols H Magnetic potentials
ij Magnetic constant
i Components of vibration mode
ij Thermal moduli pi Higher – order stresses
ij
c Elastic constant qij Piezomagnetic constant
ij
e Piezoelectric constant sij Dielectric constant
Dilatation gradient tensor H External magnetic
Magnetic potentials T Temperature change
Knocker symbol Subscripts
2
Laplace vector i Number of beams (0,1,2)
Strain tensor j Number of MEE
NUMERICAL METHOD
The results of their research illustrated that the cut-off and escape frequencies were decreased with increasing of the small scale parameter. Wang et al. [18] presented vibration analysis of piezoelectric ceramic circular nanoplates considering surface and nonlocal effects. Three-dimensional free vibration of multi layered MEE plates under combined clamped/free lateral boundary conditions using a semi-analytical discrete layer approach was analyzed by Chen et al [19]. Their results showed that considering the magnetostrictive layers as the outer layers in the sandwich MEE laminate yields an increase of an average 6–8% in frequency as compared to the laminate with the piezoelectric layers on the outside. Arefi [20] presented the wave propagation analysis of a functionally graded nano-rod made of MEE material subjected to an electric and magnetic potential. Using Hamilton's principle and nonlocal elasticity theory, the equation of motion is obtained. It is found from
his results that the applied voltage and magnetic field have a significant effect in changing the imaginary part of the phase velocity of the nano-rod. Furthermore, the imaginary part of the phase velocity for different values of applied magnetic field and voltage indicates that increasing the applied voltage and magnetic field decreases considerably the dimensionless imaginary part of the phase velocity. Linear and nonlinear free vibration of a multilayered MEE doubly-curved shell resting on an elastic foundation was studied by Shooshtari and Razavi [21]. They employed the Donnell shell theory for achieved equation of motion and Gauss’ laws for electrostatics and magnetostatics modeled the electric and magnetic behavior. Their results showed that electric and magnetic potentials have more effect on the nonlinear frequency ratios of MEE shells with smaller thicknesses and radii of curvature. Also, they [22] introduced nonlinear free vibration of symmetric MEE laminated rectangular plates.They showed that using MEE layers in composite
41 plates decreases nonlinear frequency ratio. Also, length-to-thickness ratio has negligible effect on the nonlinear frequency ratio while comparing with the effects of aspect ratio.
Li and Feng [23] proposed the static bending and the free vibration of a simply supported piezoelectric beam based on the modified strain gradient theory and Timoshenko beam theory. Their results depicted that the difference between the natural frequencies predicted by the modified strain gradient model and the classical model are large when the length-thickness ratio of the beam is small.
Also for the static bending, the electric potential, stress and electric displacement that predicted by the modified strain gradient model are smaller than those predicted by the classical Timoshenko beam model. The free vibration of MEE nanobeams based on the nonlocal theory and Timoshenko beam theory is carried out by Ke and Wang [24].
They used the differential quadrature method (DQM) to obtain the natural frequencies and mode shapes of MEE nanobeams.
Their studies revealed that the natural frequency of nonlocal nanobeam is always smaller than that of the classical nanobeam, and it decreases with an increase in the nonlocal parameter.
Ansari et al. [25] examined a nonlocal geometrically nonlinear beam model for MEE nanobeams subjected to external electric voltage, external magnetic potential and uniform temperature rise. In the other work, Ansari et al. [26] developed the forced vibration behavior of nonlocal third-order shear deformable beam model of magneto - electro - thermo elastic (METE) nanobeams based on the nonlocal elasticity theory in conjunction with the von Karman geometric nonlinearity. They depicted that increasing either the nonlocal parameter or the slenderness ratio leads to decreasing the natural frequency of nanobeams. Atabakhshian et al. [27] introduced nonlinear electro-thermal vibration and stability of a smart coupled nanobeam system with an internal flow based on nonlocal elasticity theory.
It is concluded from their results that applying an electric voltage on piezoelectric polymeric beam will increase the stability of fluid-conveying nanotube. Mohammadimehr et al. [28] established the buckling and deflection of the double-coupled piezoelectric polymeric nanocomposite rectangular plates reinforced by SWCNTs and SWBNNTs based on modified strain gradient theory embedded in elastic foundation.
Their research revealed that the elastic foundation and van der Waals interaction in contrast to applied voltage increase the dimensionless critical biaxial buckling load and vice versa decrease the dimensionless deflection of the double coupled nanocomposite plates. Also, they [29] exhibited free vibration of viscoelastic double-bonded polymeric nanocomposite plate reinforced by SWCNTs embedded in viscoelastic foundation based on modified
strain gradient theory. They found that the non-dimensional natural frequency in out of phase mode is greater than that of in- phase mode.
It is also found that the double bonded nanocomposite plate oscillated as single nanaocomposite plate of in-phase mode.
GEOMETRY OF SYSTEM
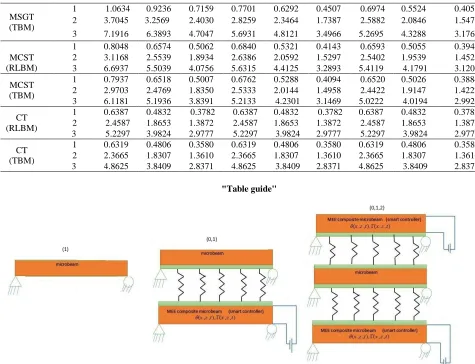
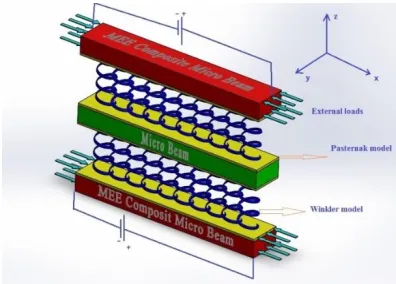
The geometry of smart micro- beam system illustrated in Figure 1 that showed the three parallel micro beams. At the middle system, a micro beam is considered that don’t have a piezoelectric and magnetostrictive effect. Two MEE composite micro beams embedded at top and bottom of micro beam are considered that the external magnetic potential, external electric potential and temperature change are exposed to them.
It should be noted that the bottom MEE composite microbeam, the middle microbeam and the top MEE composite micro beam are mentioned by 0, 1 and 2 numbers, respectively. The each MEE composite micro beam is connected to the micro beam by elastic foundation.
Fig. 1. Schematic figure of the smart micro-beam system
The governing equation of motion for smart micro-
beam system
Reddy –Levinson displacement model and kinetic
energies
On the basis of the third-order shear deformation beam theory, the displacements field of Reddy-Levinson (R-L) beam can be written as follows [30-32]:
3
1 1
, , z, , ,
i
i i i
w x t u x t z x t c z x t
x )1(
2i , z, t 0
u x (2)
3i , z, t i ,
u x w x t (3)
42
3 2
1 0
2
,
( , ( , ))
1 2
i
i
i i
L
i A
w x t
z x t c z x t
x t
K dAdx
w t
2
6 6
2 2 2
1 1
6 6
2 6
2 2
1 6 0,2
2
1 4 2 4
1 1
4 4
2 2
2
( ) 2 ( )( )
( )
1 2
2 ( ) 2 ( )( )
( )
i i i
i
i i i
i
m m w
c c
t t x t
m m
m w
c
x t m K
K m m w
c c
t t x t
m m
m
t m
0
0 2
0
( )
L
i
dx
m w
t m
(4)
where superscript (*) stands for the micro beam (1). Also
* 0, 2, 4,6
r
r
m r
m expressed as:
*
2 4 6
* (1, , , ) 0, 2, 4,6
Ar r
z z z dA r m
m (5)
The strain energies using modified strain gradient
theory
The modified strain gradient elasticity theory that exhibited by Lam[33]and Yang [34] states that the stored strain energy in a continuum constructed by linear MEE composite micro beam and micro beam occupying region, with infinitesimal deformations is given by [35- 37]:
(1) (1)
* * *(1)
0,2 1
*
1
2 D E
0
ij ijk
ij ijk
ij ijk
ij ij ij
i i i
i i i i
U
p
p
U m
m
B H
dV (6)
In which the components of the strain tensor, the dilatation gradient tensor, the deviatoric stretch gradient tensor, the symmetric rotation gradient tensor, the electric field and the magnetic field are respectively denoted by
(1) , , , , E ,
ij i ijk ij i Hi which are defined as [38-42]:
, , 1
(
2 )
ij ui j uj i (7)
,
i mm i (8)
, , , , ,
, ( )
, 1
, ,
1 1
( 2
3 15
1 1
2 2
15
)
15
jk i ki j ij k ij mm k mk m
jk mm i mi m ki mm j
jk
mj i
m
(9)
, ,
1 1
( ) (curl(u))
2 2
ij i jj i i i (10)
,
i i
E (11)
,
i i
H (12)
whereui,mm,and
ij are the displacement vector, thedilatation strain, the infinitesimal rotation vector and the Knocker symbol respectively.
*
(1) *(1)
*
, , , , ,
i i ijk ijk ij ij
p p m m ,
and represented the higher – order stresses, the electric represented the higher – order stresses, the electric and the magnetic potentials respectively which may be expressed as follows[41],[43]: and the magnetic potentials respectively which may be expressed as follows[41],[43]:
2 0
* * *2
0
2
i
i i
p l
p l (13)
2 1 * * (1)
(1) *(
1
1) 2 2
ijk
ijk ijk
l
l (14)
2 2 * *2
2
* 2
ij
ij
ij l
m
l m
(15)
2
(x, z, t) cos( z) (x, t) ,
E
E
zV
h h (16)
2
(x, z, t) cos( z) (x, t) ,
H
H
z
h h (17)
MEE Reddy-Levinson (R-L) micro composite beam which is under the plane stress condition, can be written as follows:
1
11 31 31
44 15 15
15 11 11
3
31 33 33
15 11 15
31 33 33 3
0 e 0 0
0
0 0 e 0
0
0 e 0 0
e 0 0 0
0 0 0 0
0 0 0
xx xx
xz xz
x z
x z
x z
x z
c q
c q
D s d E
T
s d E
D
q d
B H
q d H
B
(18)
c e q s
ij,
ij,
ij,
ij,
ij,
d
ij,
ij,
v
iand
i are constants thatgiven at Appendix (A-1).
The classical stress tensor
ij* for micro – beam can beobtained as follows:
* * *
2
ij ij kk ij (19)
where [46]:
* *
(1 )(1 2 ) 2(1 )
E E
43 By substituting equations (1-3) into equation 7, the components of normal and shear strains for R-L beam model are obtained as:
2 3 1 2 xx w z c z
x x x (21)
2 1 1 3 2 xz w w c z
x x (22)
By employing equation 8, 21 and 22, the non-zero components of dilatation gradient tensor are as the following form:
2 2 3
3
2 1 2 3
x z z
x x x
w c (23) 1 2 2 2 3 z z
x x x
w
c (24)
Using equations 9, 21 and 22, the non-zero component of deviatoric stretch gradient tensor are obtained as:
(1)
111 1 3
1 (1)
333 1 2
(1) (1) (1) 113 131 311
1 2
(1) (1) (
2 2 3
3 2 2 2 2 2 2 2 2 2
313 331 13 2 3 2 2 5 5 6 5 2 1 1 6
5 5 5
8 8 4 15 5 5 z
x x x
x x w z c w w z
x x x x
w x z x x c z w c w c 2 1) 2 3 2 1 2 1 3 3 8 5 5 5 x x z w z c z w c x x ( 2
3 2 3
2
2 2 (1) (1) (1)
122 212 221 1 2
1 3
1) (1) (1) 2 322 232 223
2 1 2 2 5 5 5 2 5 1 2 15 x c x z x w z c z w c w z x w x x x x (25)
By substituting equations 21 and 23 into equation 10 the non - zero symmetric rotation gradient tensor can be written as: 2 2 1 2 2 1 2 1 3 4 3 2 4 xy yx yz yz w w x x c x x w x c z z (26)
The higher-order stresses for SVCS can be attained by substituting equations (23 -26) into equations (13-15):
(1) 2 2
111 1 1
1 3
*(1) * *2 * *2
111 1 1
2 1
1 * *2
2 2 3
2 1 3 2 4 4 5 5 12 5 l z
x x x
l w z c l l l w c z l x
(1) (1) (1)
313 331 133
*(1) *(1) *(1)
313 331 133
2 1 1 * *2 1 2 2 1 1 1 2 3
* *2 * *2
1 1
(
2 3 2 3
3 3 2 3 16 5 2 5 5 2 l w c z l l l z w c l x l z
x x x
1) 2 2
1 1
*(1) * *2 * *2
333 1 1
2 1
1 2
* *2 1
(1) (1) (1)
113 131 311
*(1) *(1) *(1)
1
2
1
2
3 131 31
2 1 2 4 2 5 5 12 5 l l l l l w c w x x z x x l 2 1 * *2 1 16 15 x l l 2 1 * *2 1 2 1 1 2 * *2 1
(1) (1) (1) 122 212 221 *(1) *(1) *(1) 12
2
2 212 1
2 2 2 2 2 1 1 6 5 5 8 l l w x z x x l w c l 2 1 1 * *2 1 2 2 1 1 1 2 3
* *2 * *2
1 1
(1) (1) (1) 2 322 232 223 1 *(1) *(1) *(1)
322 232 2 3
2 3 2 3
44 2
2 2 2
2
* * *2
2 2 2 2 2 *2 1 1 2 2 2
* * *2
2 * 3 2 2 3
1
xy yx xy yx yz zy yz zy x x m c z
m l w
x x
m m l
l w
x x
l
m m l w
x
m m l
p p
c z
2 2 2 2 3
0 0 3
2 2 3
*2 *2
0 0
2 2 2
0 0 2
2
* *2 *
0 1 1 2 0 2 2 2 6 z z l l z z
x x x
l l
p l l
z
x x x
p w c l l w c (28)
The strain energy for micro – beam by substituting equations (18-28) into equation 6 is given by:
* * *(0) *(2) *(0) *(2)
1 1 3 1 3 113 1 113
0
*(0) *(0) *(2) *(0) *(2) 12 322 1 322 333 1 333
*(2)
* * *(1) *(1) 1 12 1
1 1 111 1 133 *(1) *
1 122 1 32
1 8 24
{( 3
2 5 5
2 6 2 6
5 5 5 5 2
3 6 24
) ( 3
2 5 5
6
3 5
L
U M c R P c P T c T
Y
T c T T c T
c Y
Q c F c T c T x
c T c Y
(1) *(1) *(3) *(1) *(3) 1 1 1 1 111 1 111
2 *(1) *(3) *(1) *(3) 1 133 1 133 122 1 122 2 * * *(1) *(1)
1 1 111 1 133
2 2
) (
5 5
3 3 3 3
)
5 5 5 5
6 24
( 3
5 5
P c P T c T
T c T T c T
x Q c F c T c T
*(1) *(1) 1 * *(2) *(0) 1 122 1 32 1 1 3 113
*(2) *(0) *(2) *(0) 1 113 322 1 322 333
6 4
3 ) ( 3
5 5
24 3 6 1
5 15 5 5
w
c T c Y c R c P T
x
c T T c T T
*(0) *(2) 2 *(2) 12 1 12 1
1 333 2
3 (3) (3) (3) (3) 1 1 1 1 111 1 133 1 122 3
6 3
)
5 2 2
2 3 3
( ) }
5 5 5
Y c Y w
c T
x
w
c P c T c T c T dx
x (29)
And for MEE composite micro-beams can be written as:
0 (0) (2) (0) (2)
1 3 1 3 113 1 113 2 0
0 (0) (2)
2 (0) (2) (0) (2) 12 1 12 322 1 322 333 1 333
(1) (1) (1) 1 1 111 1 133 1 122
1 8 24
{( 3
2 5 5
2 6 2 6 3
)
5 5 5 5 2 2
6 24 6
( 3
5 5 5
L U
M c R P c P T c T
U
Y c Y
T c T T c T
x
Q c F c T c T c T
0 (1) 1 32 23c Y )
(1) (3) (1) (3) (1) (3) 1 1 1 111 1 111 133 1 133
2 2 3 3
(
5 5 5 5
P c P T c T T c T
0 2
2
(1) (3) (1)
122 1 122 2 1 1 111
0 2 (1) (1) (1) 1 133 1 122 1 32
3 3 6
) ( 3
5 5 5
24 6
3 )
5 5
T c T Q c F c T
x
w
w
c T c T c Y
x
( 2) (0) ( 2) (0) ( 2) (0) 1 1 3 113 1 113 322 1 322 333
0 2 (0) ( 2)
2 ( 2) 12 1 12
1 333 2
0 3
2 (3) (3) (3) (3) 1 1 1 111 1 133 1 122 3
4 24 3 6 1
( 3
5 5 15 5 5
6 3
)
5 2 2
2 3 3
( )
5 5 5
c R c P T c T T c T T
w w
Y c Y
c T
x
w w
c P c T c T c T
x
0 2 0 } 1 2 { sin 2 L E E z E A dx V D z h
0 2 0 0 2 2 0 1 cos } 2 2{ sin cos }
E E x
H L
H H H
z x
H A
D z dAdx
x
B z B z dAdx
h x
(30)The bending moments, couple moments, higher-order resultant forces and higher order moments for micro – beam and MEE composite micro- beams can be obtained from Appendix (A-2).
The work done by external loads
For modeling elastic medium between the beams, the Pasternak model is used. According to the Winkler and Pasternak foundations, the effects of the surrounding elastic medium on the outer beams are considered as follows [45]:
2
( )
elastic medium w g
F K w K w (31)
If Kwaand Kga considered for the elastic medium between MEE composite micro – beam (0) and micro- beam (1) and and considered for the elastic medium between micro – beam (1) and MEE composite micro - beam (2) the external work due to joined beams together can be written as follows:
0 1 0 1 2 0 1 0 21 2 1 2 1 2
0 ( ) 1 ( ) ( ) 2 1 ( ) ( ) ( ) 2
L wa elastic medium ga L wb gbK w w
V w w dx
K w w
K w w K w w w w dx
45 MEE composite micro – beams are subjected to the external electric voltage VEj and the external magnetic
potential Hj and temperature change TEj . The work done
by this forces can be calculated as:
1 1
2
3 31
) 0
2 1
, ( 2
2 ,
external l j
m Hj e E
oads m e
t j
t
j
L
bq
V N N N w d
be V
N N N bh
x T
x (33)
Hamilton’s principle
Hamilton’s principle is employed here to achieve the equation of motion for smart micro- beam system. Therefore, this principle can be expressed as:
1 1
0 0
0 1 2 0 1 2
(
0 )
t t
elastic medium external loads
t t
U U U K K K
dt dt
V V (34)
By calculating equation 34 and setting the coefficient of mechanical, electrical and magnetically to zero lead to the following motion equations:
0
2 (1) 2 (3)
1 1
1 1 2 1 2
:
3 P P
M R
c Q c F c
x x x x
(0) (2) 2 (1) 2 (3)
(1)
3 3 111 111
1 2 1 111 1 2
2 6 2
3
5 5 5
P P T T
c c T c
x x x x
(0) (2) 2 (1) 2 (3)
(1)
113 113 133 133
1 1 133 2 1 2
8 24 24 3 3
5 5 5 5 5
T T T T
c c T c
x x x x
(0)
2 (1) 2 (3)
(1) 322
122 122
1 1 122
2 2
3 3 6 2
5 5 5 5
T
T T
c c T
x x x
(2) (0) (2) (0)
(1)
322 333 333 12
1 1 1 32
6 2 6 1
3
5 5 5 2
T T T Y
c c c Y
x x x x
2 3 2
(2)
2 0 2 0 0
12
1 1 6 2 1 6 2 1 4 2
3
2 2
w Y
c c m c m c m
x t x t t
3 2
0 0
1 4 2 2 2 0
w
c m m
x t t
(35)
0
2 3 (3) 2 (2)
1 3
1 2 1 1 3 1 2
(1) 3 (3) 2 (0) 2 (2)
111 111 113 113
1 1 3 2 1 2
(1) 3 (3) 3 (3) (1)
133 133 122 122
1 1 3 1 3 1
2 (0) 322 2
:
3 3
6 2 4 24
5 5 5 5
24 3 3 6
5 5 5 5
1 6
5
w
R Q F P P
c c c c
x x x x x
T T T T
c c c
x x x x
T T T T
c c c c
x x x x
T x
2 (2) 2 (0) 2 (2)
322 333 333
1 2 2 1 2
2 (0) (1) 2 (2)
12 32 12
1 1 0 1
2 2
2
2 0
0 1 0 0 0 2
3 4
2 0 2 0
1 6 2 1 6 2 2
3 2
0 0
1 4 2 0 2
1 6
5 5 5
1 3
3 ( )
2 2
( ) ( )
0
wa
ga m e t
T T T
c c
x x x
Y Y Y
c c K w w
x x x
w
K w w N N N
x w
c m c m
x t x t
w
c m m
x t t
(36)
0:
( cos( z) sin( z)) 0
Ex
z A
D
D dA
x
(37)
0:
( cos( z) sin( z)) 0
Hx
z A
B
B dA
x
(38)
1
* * 2 *(1) 2 *(3) *(0)
* * 1 1 3
1 1 2 1 2
*(2) 2 *(1) 2 *(3) *(0) *(1)
3 111 111 113
1 2 1 111 1 2
*(2) 2 *(1) 2 *(3) *(1)
113 133 133
1 1 133 2 1
:
3
2 6 2 8
3
5 5 5 5
24 24 3 3
5 5 5 5
M R P P P
c Q c F c
x x x x x
P T T T
c c T c
x x x x
T T T
c c T c
x x x
2 *(1) 122
2 2
2 *(3) *(0) *(2) *(0) *(1)
122 322 322 333
1 2 1 122 1
*(2) *(0) *(2) 2
*(1) 2 *
333 12 12 1
1 1 32 1 1 6 2
3 2 3
2 * 1 * 1 *
1 6 2 1 4 2 1 4
3 5
3 6 2 6 2
5 5 5 5 5
6 1 3
3
5 2 2
2
T x
T T T T
c c T c
x x x x
T Y Y
c cY c c m
x x x t
w w
c m c m c m
x t t
2 *
1 1
2
2 2 0
x t m t
46 1
2 * * * 3 *(3) 2 *(2)
1 3
1 2 1 1 3 1 2
*(1) 3 *(3) 2 *(0) 2 *(2)
111 111 113 113
1 1 3 2 1 2
*(1) 3 *(3) 3 *(3) *(1)
133 133 122 122
1 1 3 1 3 1
:
3 3
6 2 4 24
5 5 5 5
24 3 3 6
5 5 5 5
1 5 w
R Q F P P
c c c c
x x x x x
T T T T
c c c
x x x x
T T T T
c c c c
x x x x
2 *(0) 2 *(2) 2 *(0) 2 *(2)
322 322 333 333
1 1
2 2 2 2
2 *(0) *(1) 2 *(2)
12 32 12
1 1 0 1
2 2
2 2
0 1 1 2 1 2
3 4 3
2 * 1 2 * 1 *
1 6 2 1 6 2 2 1 4
6 1 6
5 5 5
1 3
3 ( )
2 2 ( ) ( ) ( ) wa
ga wb gb
T T T T
c c
x x x x
Y Y Y
c c K w w
x x x
K w w K w w K w w
w
c m c m c m
x t x t
2 *
1 1
0
2 2 0
w m
x t t
(40)
2
2 (1) 2 (3) (0)
1 1 3
1 1 2 1 2
(2) 2 (1) 2 (3) (0) (1)
3 111 111 113
1 2 1 111 1 2
(2) 2 (1) 2 (3) 2 (1) (1)
113 133 133 122
1 1 133 2 1 2 2
:
3
2 6 2 8
3
5 5 5 5
24 24 3 3 3
5 5 5 5 5
M R P P P
c Q c F c
x x x x x
P T T T
c c T c
x x x x
T T T T
c c T c
x x x x
2 (3) (0) (2) (0)
(1)
122 322 322 333
1 2 1 122 1
(2) (0) (2) 2
(1) 2
333 12 12 2
1 1 32 1 1 6 2
3 2 3 2
2 2 2 2 2
1 6 2 1 4 2 1 4 2 2 2
3 6 2 6 2
5 5 5 5 5
6 1 3
3
5 2 2
2 0
T T T T
c c T c
x x x x
T Y Y
c cY c c m
x x x t
w w
c m c m c m m
x t t x t t
(41)
2
2 3 (3) 2 (2)
1 3
1 2 1 1 3 1 2
(1) 3 (3) 2 (0) 2 (2)
111 111 113 113
1 1 3 2 1 2
(1) 3 (3) 3 (3) (1)
133 133 122 122
1 1 3 1 3 1
2 (0) 322 2 :
3 3
6 2 4 24
5 5 5 5
24 3 3 6
5 5 5 5
1 6 5 w
R Q F P P
c c c c
x x x x x
T T T T
c c c
x x x x
T T T T
c c c c
x x x x
T x
2 (2) 2 (0) 2 (2)
322 333 333
1 2 2 1 2
2 (0) (1) 2 (2)
12 32 12
1 1 1 2
2 2
2
2 2
1 2 2 2 2 2
3 4
2 2 2 2
1 6 2 1 6 2 2
3 2
2 2
1 4 2 0 2
1 6
5 5 5
1 3
3 ( )
2 2 ( ) ( ) 0 wb
gb m e t
T T T
c c
x x x
Y Y Y
c c K w w
x x x
w
K w w N N N
x w
c m c m
x t x t
w
c m m
x t t
(42)
(39)
2:
( cos( z) sin( z)) 0
E x z A D D dA x (43) 2:( cos( z) sin( z)) 0
H x z A B B dA x (44)By substituting equation (A-2) into equation (35-44) the following equations of motion can be expressed as:
0
2 2 2 2 0
1 1 44 1 2 1 0
2 2 2 2
1 1 11 0 1 2
2 2 2 2 2 2 2
0 1 2 1 0 1 2 1
2
2 2 2
0
1 1 11 1 2
2 0 :
96
{( 6 9 ) ( 9 ) }( )
5
32 1
{ ( 2 ) (2 )( )
15 4
88 3 9
(12 )( ) (18 24 )( )}
5 2 4
16 1
( ) {( ) ( )( )
15 4
(6
w A c I c J c l l c I
x I c J c K c l l l A
l l l c I l l l c J
c K c J c l l A x l
2 2 2 2 2 2
1 1 0 1 2 1
3 4
2 2 2
0 0
0 1 1 1
3 4
5
2 2 2 0
0 1 1 1 5
(1) (3) (2) (0) 0 31 31 131 1 15 15
(1) (3) (2) 31 1 31 1 15
9
12 )( ) (18 24 )( )}
4 4
( ) {(2 )( 2 )}( )
5 4
{(2 )( )}( )
5
{ 3 }( )
{ 3
E
l c I l l l c J w
l l I c K c J
x x
w l l c K c J
x E E c c E E Q c Q
x c Q
(0) 0
15
2 3 2
2 0 2 0 0
1 6 2 1 6 2 1 4 2
3 2
0 0
1 4 2 2 2
}( 2 0 ) H Q w
c m c m c m
t x t t
w
c m m
t x x t (45) 0 2
2 2 2 2 0 0
1 1 44 1 2 1 2
2 2 2
1 1 11 1 2
3
2 2 2 2 2 2 0
0 1 1 0 1 2 1 3
2 2 2 2 2
1 11 1 2 2 1 1
:
96
{( 6 9 ) ( 9 ) }( )
5 16 1
{( ) ( )( )
15 4 9
(6 12 )( ) (18 24 )( )}( )
4
8 1 3 32
{( ) ( )( ) ( )( )
15 4 2 5
w
w A c I c J c l l c I
x x c J c K c l l A
l l c I l l l c J x c K c l l A l l c I 4 2
2 2 2 2 0 0
0 1 2 1 4 0 0 0 2
5
2 2 2 0 2 2 2
0 1 1 1 5 0 1 1
6
(3) (2) (0)
0 0
1 31 1 15 15 6
(3) (2) (0) 0 1 31 1 15 15
2 2 2 9
(18 24 )( )}( ) ( )
4
4 4
{(2 )( )}( ) {(2 )( )}
5 5
( ) { 3 }( )
{ 3 }(
m e t
E
H
w w
l l l c J N N N
x x
l l c K c J l l c K
x w
c E c E E x
c Q c Q Q
x
0 1
3
2 2 0
0 1 1 6 2
4 3 2
2 0 0 0
1 6 2 2 1 4 2 0 2
2 ( )
( )
0 ) wa
ga
x K w w
K w w c m x t
w w
c m c m m
x t x t t
47 0 2 2 2 2 11 33 2 2
(1) 0 (2) (3) (0) 0 0 31 1 15 1 31 15
0 0
11 0 33 0
)( ) 0 : (3
E H E H
E
w
x x x
Y X
x x
E c E c E E
X Y (47) 0 2 2 2 2
11 2 11 2 33
(1) 0 (2) (2) (0) 0 0 31 1 15 1 31 15
0 0
0 33 0 )(
(3 )
0 : H E H E H w
x x x
Y T Y
x x
Q c Q c Q Q
T
(48)
1
* * 2 * * *2 *2 2 * * 1
1 1 44 1 2 1 1
* * 2 * * *2 *2 *2 * *
1 1 11 0 1 2
*2 *2 *2 * * *2 *2 *2 2 * *
0 1 2 1 0 1 2 1
2
2 * * 1
1 1
2
:
96
{( 6 9 ) ( 9 ) }( )
5
32 1
{ ( 2 ) (2 )( )
15 4
88 3 9
(12 )( ) (18 24 )( )}
5 2 4
( ) {(
w
A c I c J c l l c I
x
I c J c K c l l l A
l l l c I l l l c J
c K c J
x
* *2 *2 * * *2 *2
11 1 2 0 1
3 * * *2 *2 *2 2 * * 1
1 0 1 2 1 3
4
*2 *2 * * 2 * * * * 1 *2 *2
0 1 1 1 4 0 1
5 2
2 * * * * 1 2 * 1
1 1 5 1 6 2 1
16 1
) ( )( ) (6 12 )
15 4
9
( ) (18 24 )( )}( )
4
4 4
{(2 )( 2 )}( ) {(2 )
5 5
( )}( )
c l l A l l
w
c I l l l c J
x
l l I c K c J l l
x w
c K c J c m c
x t 3 2
2 * 1 * 1 6 2 1 4 2
3 2
* 1 * 1 1 4 2 2 2
2
0
w
m c m
x t t
w
c m m
x t t
(49) 1 2 *2 *2 2 * * 1 1
1 2 1 2
* * 2 * * * 2 * *
1 1 44 1 1 11
*2 *2 * * *2 *2 * *
1 2 0 1 1
3 *2 *2 *2 2 * * 1
0 1 2 1 3
2 * * *2 *
1 11 1 2
:
96
( 9 ) }( )
5
{( 6 9 ) {( )
16 1
( )( ) (6 12 )( )
15 4
9
(18 24 )( )}( )
4 8 1 {( ) ( 15 4 w w l l c I
x x
A c I c J c c J c K c
l l A l l c I
l l l c J
x c K c l l 2 * *
*2 *2 * *
2 1 1
4 *2 *2 *2 2 * * 1
0 1 2 1 4
5 *2 *2 2 * * * * 1
0 1 1 1 5
6 *2 *2 2 * * 1
0 1 1 6 0 1
2 2
0 1 1 2 1 2
)( )
3 32
( )( )
2 5
9
(18 24 )( )}( )
4 4
{(2 )( )}( )
5 4
{(2 )( )}( ) ( )
5 ( ) ( ) ( wa
ga wb gb
A
l l c I
w
l l l c J
x
l l c K c J
x w
l l c K K w w
x
K w w K w w K w w
3 4 3 2
2 * 1 2 * 1 * 1 * 1
1 6 2 1 6 2 2 1 4 2 0 2 ) 0 w w
c m c m c m m
x t x t x t t
(50)
2
2 2 2 2 2
1 1 44 1 2 1 2
2 2 2 2
1 1 11 0 1 2
2 2 2
0 1 2 1
2
2 2 2 2 2
0 1 2 1 2
2 2 2
1 1 11 1 2 0
:
96
{( 6 9 ) ( 9 ) }( )
5
32 1
{ ( 2 ) (2 )( )
15 4
88 3
(12 )( )
5 2
9
(18 24 )( )}( )
4
16 1
{( ) ( )( ) (6
15 4 w A c I c J c l l c I
x I c J c K c l l l A
l l l c I
l l l c J
x
c K c J c l l A l2 2 1 1 3
2 2 2 2 2
0 1 2 1 3
4
2 2 2 2
0 1 1 1 4
5
2 2 2 2
0 1 1 1 5
(1) (3) (2) (0) 2 31 31 131 1 15 15 (1) (3) (2) 31 1 31 1 15
12 )( )
9
(18 24 )( )}( )
4 4
{(2 )( 2 )}( )
5 4
{(2 )( )}( )
5
{ 3 }( )
{ 3 E
l c I w
l l l c J
x l l I c K c J
x w l l c K c J
x
E E c c E E
Q c Q c Q
x
2
(0) 2 2 2
15 1 6 2
3 2 3 2
2 2 2 2 2
1 6 2 1 4 2 1 4 2 2 2 }( 2 0 ) H
Q c m
t
w w
c m c m c m m
x t t x t t
x
(51)
2
2
2 2 2 2 2 2
1 1 44 1 2 1 2
2 2 2
1 1 11 1 2
3
2 2 2 2 2 2 2
0 1 1 0 1 2 1 3
2 2 2 2 2
1 11 1 2 2 1 1
:
96
{( 6 9 ) ( 9 ) }( )
5
16 1
{( ) ( )( )
15 4
9
(6 12 )( ) (18 24 )( )}( )
4
8 1 3 32
{( ) ( )( ) ( )( )
15 4 2 5
w w A c I c J c l l c I
x x
c J c K c l l A
l l c I l l l c J
x
c K c l l A l l c I
4
2 2 2 2 2
0 1 2 1 4
2 6
2 2 2
2 2
2 2 2 2 0 1 1 6
5
2 2 2 2
0 1 1 1 5
(3) (2) (0) 2 1 31 1 15 15
(3) (2) (0) 2 1 31 1 15 1
2 2 5
2 9
(18 24 )( )}( )
4
4
( ) {(2 )( )}( )
5 4
{(2 )( )}( )
5
{ 3 }( )
{ 3 }(
m e t
E
H
w
l l l c J
x
w w
N N N l l c K
x x
l l c K c J x c E c E E
c Q Q
x c Q
3
2 2 2
1 2 1 2 1 6 2
4 3 2
2 2 2 2
1 6 2 1 4 0
2
2 2 2
( ) ) ( ) 0 wb gb
K w w K w w c m
x t
w w
c m c m m
x t t
x
x t
48
2
2
1 1 2
2 2
11 33
2 2
(1) 2 (2) (3) (0) 2 2
31 15 31 15
2 2
11 2 33 2
)( : (3 ) 0 E E H E H w c c
x x x
Y X
x x
E E E E
X Y
(53)
2
2
1 1 2
2 2
11 2 11 2 33
(1) 2 (2) (2) (0) 2 2
31 15 31 15
2 2
2 33 2
)( : (3 ) 0
E H
H
E H
w
c c
x x x
Y T Y
x x
Q Q Q Q
T
(54)
Non-dimensional form of motion equations
By introducing the dimensionless quantities that represented at Appendix (A-3), the motion equations can be obtained in the following dimensionless form:
0
2 2 66 0
44 55 55 1 2 2 0
2 2 2
22 22 33 0 1 2 55
2 2 2 2 2
0 1 2 44 33 22 1 2 55
2
2 2 2 0
0 1 2 44 2 2
2 2
0 1 44 :
96 1
{( 6 9 ) ( 9 ) }( )
5
32 1
{ ( 2 ) (2 )
15 4
88 3 16 1
(12 ) {( ) ( )
5 2 15 4
9 1
(18 24 ) }( )
4
(6 12 ) i W
a i j
X
i j k a
i k j a
j
X i
3
2 2 2 0
0 1 2 44 3 3
9 1
(18 24 ) }( )
4 W j X 4
2 2 0
0 1 33 22 33 4 4 5
2 2 0
0 1 22 33 5 5 0 31 31 1 1 15 15
0 31 1 31 1 15 15
2
2 0
1 166 1 144 122 2 2 2
1 144 1 1
4 1
{(2 )( 2 )}( )
5
4 1
{(2 )( )}( )
5
1
ˆ ˆ
{ 3 }( )
1
ˆ ˆ
{ 3 }(
1 ˆ ˆ ( 2 ˆ ) )( ) ˆ ( E H
i k j
X W k j
X E F c c F E Q c G c G Q c I c I I c I c
X
I
X
3 0 66 3 2
1
)( ) 0
W X (55) 0
2 2 66 44 55 55 1 2 2
2
2 2
0 0
22 33 1 2 55 2
3
2 2 2 2 2 0
0 1 44 0 1 2 44 2 3
:
96
{( 6 9 ) ( 9 ) }
5
1 16 1
( ) {( ) ( )
15 4
9 1
(6 12 ) (18 24 ) }( )
4 W
i
a i j
W
j k a
X X i j X
2 2 2 2
33 1 2 55 2 1 44 4
2 2 2 0
0 1 2 44 3 4 0 0 0
2 5
2 2
0 0
0 1 22 33
2 4 5
6
2 2 0
0 1 22 5 6 1 31 1 15 15 0
2
8 1 3 32
{ ( ) ( )
15 4 2 5
9 1
(18 24 ) }( ) ( )
4
1 4 1
( ) {(2 )( )}( )
5
4 1
ˆ ˆ
{(2 )( )}( ) { 3 }
5 1 (
m e t
E
k a i
W
j N N N
X
W
k j
x X
W
k c F c F E
X 1 2 0 1 31 1 15 15
2
0 1 0 1
3 2 4 2
2 0 1 166 0 100 0
1 66 1 144 2 2 2 2
3 2 2
2
1
ˆ ˆ
) { 3 }(
( ) ( )
ˆ 1
ˆ ˆ
( )( ) 0
) H
ga wa
c G c G Q
K k
W W W
X
W
c I W I W
c I c I
X X X (56) 0 2 2
0 0 0
31 1 15 1 31 15
2 2
0 0
2 2
11 33
2 2
11 0 33 0
ˆ ˆ
:
(3
ˆ ˆ
)(
![Fig. 2. Comparison present results with those obtained by Wang et al. [53]](https://thumb-us.123doks.com/thumbv2/123dok_us/41831.2004973/13.612.332.526.436.582/fig-comparison-present-results-obtained-wang-et-al.webp)