1 , . , - T L . ( ' l l J O I R \ ' - 1 1 , O F E N G I N E E R I N G A N D T E C I I , N O L O G I ' I ( l ) 2 0 0 . 1 : l 7 - 2 5
D I S C R F ' I
E T ] L E M E N ' t
N I O D E L L I N G
O F ' T H E IM P A C T P A R A M E I ' E R S
OF A SELECTED FRIJIT: I\{ODEL VALIDATION AND EFF-ECT
OF
D A M P I N G
R a j i x , A . O . a n d F a v i e r ,
J . F '
* L ) e p a r t r n e n t
o l A g r i c u l t u r a l
E n g i n e e r i n g ,
U n i v e r s i t l '
o f I b a d a n
D e p t .
o l ' A g r i c
a n d E n v i r o n l n e n t a l
S c i e n c e s ,
[ ' n i r e r s i t l o f N e u ' c a s t l e - u p o n - ' I 1 ' n e ,
[ . l K
. 4 B S T R . . I C T
The Discrete Elenent Method has been ryplied to numerical modellitrg of the impact process irt
fnit rtith o viex'to ohtttin irtformntiott on damages due to impact. A DE code n,hich incorporated u
non-linetr fiscoelastit' r'ontact 1611y, t'tJol corttoiuittg x,ulls nnd particle deformation developed fronr
un existirtg code usirtg a linear elastit' conloct lcnv tlilhout c'ontaining walls x,tts used. The code x'ss vnliduted x,ith avoilnblc thaoretit'al und erperimetttal results on intpuct behaviour of ruhber
sphercs. I'he parumetrit' variiliorts x'illt different damping coeJficients v,ere then simuliled .fbr u
selectctl .fi'uit ilroppad Ji'om a height ol 10, 15 20 utd 30 ct,t otrto tr hsrd flat su(ace. The porflnteters invcsligated include varialiorr itt thc fbrc'e, time, r,elocit1,, deformation and tlrc peak .fbrc'e during cottlact in relstiotr lo the haislrt of' lrttp.
'l'he
e-rperimentfll untl tlrc simulated x,ere
.fittrrttl to hc in good ugrtet,tent (p>0.051 rrith no ttgttilicant diJlerences. The peakforces pretlicted b 1 ' t h e s i m t r l n t i o r t x , e r c . l ] . 5 , 8 5 . 2 u r r d 1 - l r . - \ ' i l \ c o t n p o r c d t o , 1 0 , 8 7 u n d 1 3 6 N f t ' o n i t h e c.rptriment.fbr spheres waiahing 29..1, 95 utrd l9().1 g respet'tit't'l.t'. The predicted time oJ'coutoct
n'ut ltttwever sli14lttl,1'lox,tr irt ull tlra cuscs btrl thtre is no siutrilicant diJferent'c betx,een lhe
crptritncrtlul utrd the prailit'teil (p>0.05). l'hc srttd.t' r;itlt llte .li'ttits ulso sltowad gootl ugreeiltent witlr tha i,.tir/irrg dutrt, ittrlit'ulcil h,l'lhe Jbuturas oJ th<t cttrtas, which sltoweil lltul tltt rtort-littenr rist'ot,luslit' L'otrloL'l rttotlel is u gottd upproxituution .for prt'ili< tittg llte cortluc't hehtviour oJ' vi.st'tttlulit' tttutt't'iuls. I rt.iitrrttutitttt utt tltt puru,rtclars raquirtil irt the selcctiott ul' upprcpriute trtutt'riul: uttd rurt!t, tt.l 1tm'trrttt'ttrs tt.se.firl itt tlte tlasigu oJ'htttilliui4 equipmetrt were prorideil. 7'ht
rtrttdrl is tltt'r't'lorr, il tt\L'f ul tttrtl itr tlta stuh' oJ irttltut't 1l'ot'css.fbr ugricultural particttlote (dist'rela)
rtrutariuls.
t \ l l t o t ) t ( ' t l o \
' i! r r ' l) r : c l t ' 1 e l r l r n r c r ) t \ l r t i t o r i I I ) l : \ l ) i s u s t l l - c s l l t h l l s l l e ( l c o n r p u l l l t l r ) r 1 a l n l u l i r ( ) ( l i o r r n r r r i c l i u t g t l t t t - n c c l r e r t i c u i l . c l t a r ro L r l o l ' Ix11i!'11111r' o r t l r s c r c t c s \ s t . n r \ l ' l r c l ) | \ ' l t l r l l c r s l i o n r t h c [ j i n r t e ' r ) l -I l , r r i n t l l r v l i i c n r c r r t \ l e t l r o d ( F I : o r I J [ : t r r h i c h lr f a t s . l l . r r tl f u l i . r t r ' s \ s t c l ' ) . 1 l s A c ( ) l ) t i l l l i l . l r n . l r r t ) l : \ 1 . n t a t e l i a l f r ( ) p c r l r e s . r r t t c r - p a r t r c l c c ( ) n t a c l li r r c e s . d r s p l a c e n t c n t a r r d o t l t e r r n e c h : u r i c a l p a r r l l l c t c r s a r c c a l c u l a t c d o v c r J ( l r s c r e l c 1 r ' c r v s r r r a l l ) ti r n e . h e n c c a k n o u l c d g c o i ' l h c i r r t c r a c l r o n o l t h c ' p a r t r c l c s a t t l l c m l c r o t r n r e s c a l e r: rnailc possible. -l his theretbrc enables a better 1 . ! c d l e t l o n i r n d u n r i e r s t a n d r n g o i - th e b e i r a v r t l u r o v e r a l r r l c r u lr r . t t c s c a l c .
'l
hc thc'orier, lovcrlirig tltr,: behaviour ol . r ! . r i c u l t u r a l p a r t r c u l : r t c s , c o n t a c t th c o r v a n d l h c o r y o l ' , ' l r r s t r c i t v r v e r c rl i s c u s s e d b v R a l i 1 1 9 9 9 ) a r t t l ,; ; n a i s t r i , c l i r L r r t d n t \ l o h s l n r r r 1 iV S [ r ) . l i r t r o s h e u l . o .l r r d ( r , r o c l r e r ( 1 9 7 0 ) . ( i t : n e r a l l y * ' l t s r t a p u r c l y c l ; r s t i c ' r r t a t c r t a l rs d r o p p e d r c l t i e a l i ' , r i r r , i i r o i . : ^ ' ' 1 l : l \ L I l J a c . a s s u n l l n g t l t e I c r s n ( ) c x l r r r r i] a l t c L
-I r r | r u . r t 1 \ e \ p c c t c ( l th a t t h e n l a t e r i a l w r l l c t ' r D t r n u c I i o u n e r n ' , I I o ' , r c v e r - lb l a n o n - e l a s t i c n r a t c r i a l i t \ \ il l l r o u r r c c i i r r r t r n r b e r o f ' t i n r t ' s . l o o s i n g c n e f g V a l l e a c l l u n l ) i l c t b c t i r r e c t r n r r n g , t o r c s t o n t h c s u l f i c c . O n c a c i r i n r p a c t th e p l r t i c l e d e l i r r n r in a c c o r d a n c c u i t h t h c p o t e n t r a l e n c r q \ / o l ' f a l l .
In fiuit handling, most of the clanraqcs arc rn
f o r n r o f b r u i s r n g o c c u r r i n q a s a r e s u l t o i i r r . r p a c t s a s a l n s t a v a r i e t y o f s u r t a c e s a n d p a r t i c u l a r l y d u r r n g lr n p a c t s u i t h o t h e r fr u i t s . ' I h i s t l p e o f d a m a g e r s a r r i a j o r c a u s e of qualrtl loss for lresh fi'uit l Siyarni ct c1 198,!.
Studnran, 1990). 'l-he deliirnratiorr lt nlrpact has been
ruscd to cstllllrll- danraqc to solne agrreiritulai nratcrial-s
l.i ::r:rr'!; ',-'c"rrchers. 'ilre ,lalrucc urrti strcss
d r : ; t r i b u t i o n o r ' r i n r p a c t i n g f r u i t s r i n r , l c r \ i u t l c l n t l d y ' n a n r i c l o a r l s h : r v e b c t ' n s t L t t l i . ' , 1 r , r . 1 1 " 1 q ' 1 . i 1 u . t r t g
i u t it l t r s c . r l p c r , t t t r n t l l n t t l i t l , r l r i i r u l t r i r g n ' . i l t L t r l t b c t o l ' p r r h l r s h c J p a i ; r i h i ' , i i : t c s t r l t r , r t i : l i e h e ir . . r ' , r , ; : ; t , ; l ' l l t r t s . l - h e s r : i r t c l i r , i r : n ; i , . ; , ' t o f l i u i t r : i \ \ l i i e : . . . ; . , " ; i t . r t , l o r r r r r l r l , . r l c r r r i : ' , , . i : i l f o o r l J l i r l il , r l t . l ( i . ir . i , : , ii c t ( , 1 ( 1 /
Raji, A.O. and Favier, J.F. / LAIITECH Jourual of Engineuing ani Technologl, l(l) 2003: l7-25
et al, 1994 Lichtensteiger et al. 1988) and impact
damage on other fruits and contact pressure
measurement (Mathew'and Hyde, 1997: McGlone et
ol. 1997a and b: Herold et al,2001)
Srudres have also been carrred out uslng
insfturnented spheres. This is a physical artificial
sphere that captures each impact it expeneuces
through an electronic sensor placed rn it (Tennes cl o/
1990; Hyde et al 1992). Pan-s e/ ul (1994) however
observed that there has been considerable difficulty
in relating the output to the level of fruit bruising. Prediction models have also been used rn bruise damage studies. The models results are usually compared with published experimental work or wrth results from expenmental works used as the
basis for the model development. (Siyanri et ci,
1988t Chen and Yazdani. l99l ). The problem
usually associated with these models is inexact
assumptions of material behaviour leading to the use
of approximate theories. These predictive models are
based on the acceleration history and mass of the
oblect. The contact theory considering the type of
contact surfaces is very important in impact damage.
The DEIvI is a method that considers both the
acceleration history, mass alld contact theory. The
possibility of monitoring the interaction at very
minutersmall trme rnterval is also an advantage over
other forms of modelling methods.
Lichtensteiger et al ( 1988) nreasured the
impact force on tomatoes and some non-agricultural
materials (e.g. rubber) dropped on a very rigid and
heavy base. The force data at equal tinre intervals
were recorded via a force transducer connected to an
oscilloscope and recorded or saved on a
microcomputer. A sampling rate of 2.10prs per point,
which gave adequate precision, was used for defining
the force-time curve. and tests were repeated at a slower sampling rate of 100-500ps per point to obtain the time between the first and second bounces. Using the force-time information during contacts
simple equations based on Newton's law of motion
and finite difference approximation were developed to determine the velocity, acceleration and
displacement during contact on a plate placed on a
very heavy and ngid surface. The coefficient of restitution and energy dissipated during impact were
also determined Tlre researchers nrade the fbllow ing
assumptions during the development of mathematical
model for tlre latter pararlleters; the products are spherical, the centre of mass and the centre of the sphere remained coincident during contact, all the mass was subjected to the same acceleration and vibrations were negligible. One very good advantage
of modelling is that it can elin'Li.nate or reduce the
excessive time spent on experimental work and make
the prediction ofany process very easy.
l'he DEM has evolved from vanous
disciplines , such as geomechanics, physics and
structural engineering so is its application on inpact
has been widely spread over a nunrber of engineennrg
materials. lnrpact studies using DEM r.vas appliecl on
r o c k s a n d s a n d s p a r t i c l e s b y N i c o t t c r a / ( 2 0 0 1 ) u h o
sfucired the behavrour o1- a restrainlllg nets fbr rocklalls
rn embanknrents. The Di:\'t aiso iound applicatlon ni
the pharnrace'utrcal processes r.r'ith the str,rdies ot' Kalirr
and 'fhornton ( 199-1 ). Thornton ('t ill ( 1996) anci n-ing ,,r
u l ( 1 9 9 1 ) ' o n l r a g m e n t a t i c l n a r r d i m p a c t b l e a k a g e o t ' a g g l o n r c r a t c s .
DI:iVI inrpact application has alst'r been usecl t<r
study the damage rcsultrn-u fi'onr irrrpact and dvnanric
loads durrng transportatr()n ol- fl'uits packed rn
containers on a truck becl. (Rong, 1993). 'l-he eflects ol
packing arrangenreut. stack herght and the road
roughness on the danrages to the fi'uit were studied. The
lcsult of the variation of the forces in the layers of the
fnrit ,'vhich are in accord rvith experimental results of
Holt el a/, (198-5) nere used to recornmeud optinrurn
p a c k i n g a r r a n g e r n e n t . S c h e m b r i a n d H a r r i s (1 9 9 6 ) a l s o a p p l i e d th e D E M t o t h c s t u d y o f 2 - D f } a c t u r e o f a c e l l u l a r m a t e r i a l ( s u g a r c a n e ) u n d e r in r p a c t l o a d . T h e
failure of a tlarlsvcrsc' section of the cane rvith
stolage-cells represented as hexagonal elcntcllts rras obtainecl
by obserrrrng and conrparing lines along bloken contact
pornts with those fionr an expenlltental sc-t up. []oth
produced \'-shaped failure pattern verv srnrrlar in c l i m e n s r o n .
It is pertinent to note that entphasls has bcen
laid on the impact breakage of' cluster of particles bur
drop inrpact ol- ob1ects is a very conlmon l)rr]ccss lll
agricultural materials handling especially during harvestiug and in food processing industries. An
understanding of the process is therefore as irnportant
as other impact processes. There is therefore a need to
extelld the numerical studies to impact drop process
rvhich has been extensively studied experimentally as
stated earlier. An understanding of the process rrrll
reduce losses associated w'ith bruising which is a nta.lor
cause of quality loss for fresh fiuit usualll, recorded in
fruit handling. It will also provide insi-eht intt-r
parameters that are necessary in machinery and process
d e s i g n .
The objective of this study rvas therelbre to
study the behaviour of' a fruit duling impact usin-q the
DE model to determine the variations in some rmpact
parameters with a !'re\\' to understanding the lrnpact
process and making predictions for nraterial selection
fbr fnrit handling.
. I ' H E O R E T I C A L
A N D N I O D E L D E V E L O P N I E N T
The DEM is an explicit numriica! scheme in
which the interaction of particles or bodies u'ithin a
system is nronitored contact by coni:rct and the niotion
modelled particle by pa-ticle. The process involves
solution of the equation of nrotion on each particle over
very snrall drscrete time step (At) usrng an explicit tinre
numerical llnite difference approximatron {I"DA). The
resultant of the component forces; contact (f, ), gravity
j ! l
Ruji,.1.(). unl I-'avitr, J.1". / l..lI'TE('II Journal of Etrginatring und Ttchnology l(l) 2003: l7-25
r l . r \ ) / , r i l l ! o l l t A C l \ \ l t l t , \ o t h C r p A t ' t l C l e S p r ( ) t l u c c s
. r . j, j l c r J I l r ) r ] . l ' h c r e lb r e
l l t : L I , ,
I I . . - l ; " + I r l * I r . I
r = l
I h r s r s r n t c l r u l c d r r s i n L l t l l ( ' [ r l ) / \ l c a p l i o g i n t c u r r t i o n . . h e rr r c l r o b t l r n t l r e v c l o c i t v a n d d i s p l a c r - n r c n t i n r r r r l c r t o r l c l c r n r r r t c l l r c l t e " r p a r t i c l c p o s i t l o n ( X r . rr ) . l l l c r t l l c t u i l c s t c l l .
\ r , t x , - j : . i , . , , ' \ i - - . r l
. . \, * i x, t, + (X ), .\t l.\t
,l
' l ' h e
c o r r l a c t l i l r c c s b c t s c c n a p a r t r c l c a n c l it s i r t t n r c t l r u t c n e r ! l h b o u r s a I c c a l c u l a t c d u s u l g r p p r r r p r . i a l e f t r r c c - d i s p l a c e n r e r r t l a u s l n I ) E \ ' 1 . p l r t i c l e s a r c r r s u a l l v In o d e l l c r l a s s p h c r e s fo r c a s e o l ' r r ( ) n r p u l l t i ( r n r l u c t o t l r c a v a i l a b i l i t r o l ' e s t a b l i s h e d r c l a t r o n s h i l - r h c l w c c n t \ \ o c o n t a c t i n r t s p h c r e s . In t h l s s t r r d v t l t c l l c r t z t h c o l y r r h i c h g i v e s t h e l i r r c e s b c t r i c c n t \ \ ( ) c ( ) n l r c t r r r g c l a s t i c c o n v c x s r r r f a c r s \\ a s L r : c t l I l r c t l r c o r t q i \ c s r s i t n o n l r n c a r r c l a t i o n s h l p u l I o r r n o l t h c l r n c a r l: - = k r . ' f l r e u s c o l ' l p r c - t l e t c r n r r n c c ( ) n t l c l s l r f ' l l r c s s c o e l l l c i c n t A $ a s c l r n r i n a t e d a n d r e p l a c c d r r it l r a d Y n a n r i c , \ ' i l r r d b l c c o n t a c t s t r t ' l i r r - ' s s r n ( l t l r c t l r s p l i r c c r r r c n t ( x ) a s t h c a p p r o a c l r o l ' t h c c c n t c r s o l ' t l t e t u o b r i d i c s (r r ) . ' l ' h c i o r t l u c t s t r l - l l t c s s r s , l c 1 ' t c n , l e r r t ( ) l r : t h c s t r c l l g t l ) l) l o l ) c r t \ ' 1 A , r r h r c h t s r l c I s 1 1 , l r ' , r 1 o n t l l c c l a s t r c n t t r i l r r l u s u n ( l I ) ( ) l s s o l t r a t i o o l t h c c o n t i l c t r r t b o t l r c s ) . t h c ' . t c o n l e l r v ( R , d c p e n t l c n t o r r t h c r a d r r o l ' t h e t w o s p h e r i c a l b o d i e s ; . I l c r r c c
I , K ' l { t r - l
l l r c t l r c o r v h l s a l s o b e c n c x t e n t l c c l to t h e a r ) n l l i c l l r c l * r : c l r c ( ) l l c J v e l l a t a n d c o n v c \ b o d i e s . I l r r ' r c l i r r c t h e c o r r r p u t a l r o n o l ' l h c c o r r t a c t b e l u ' e e n \ | l l c n c u l o b l c c t s a n ( l c o n l 0 l n c r u a l l n a s n l a d c c a s y . l . r r r t h e r c l c t a r l s o n t h e t h e o l y c a n h e o b t a i n c d i n
I r r r r o s h c n k o u n c l ( i o o c l r c r ' ( 1 9 7 0 ) . ' [ - h c - c x t e n s i o n b y l { . r p 1 1 9 9 9 ) tr l o t h e r b o c l r c s a s n ' c l l a s i t s a d a p t a t r o u Io rnclrrtlc \ lscor.rs clcrrrcnt for l'iscoclastic ntaterials r s p r c s e n t c d r n R a . j r a n d I r a v i c r ( l 9 9 t i ) a n r l [ " a v i c r a n c l I t a l i ( l ( X ) l ) , \ c c o l d i u u t o ' l s u . ; i t ' t u l ( 1 9 9 2 ) a n d l h u n ! a n d \ \ ' l r r t t r : r r ( 1 9 9 6 ) r ' i s c o e l a s t i c r t y l s n r o r e r c l l r s t r c l i r r a s r r c r r l t r r r a l p a r t r c u l a t c s t h a n t h e n r o r e e o r t t n t o r t l l r r s r : r l lr n c a r c l a s t i c n r o d c l s . - l ' h e u o r k s * c r c c o r r o b o r a t r . ' t l h r t h c l l l v c s t i g a t r o n o l - Z h a n g a n d \ \ ' l r r t t u n 1 l( ) ( ) ( r ) r r r r tl r l l i ' r e n t n t e i h o ( l s o 1 ' c a l c u l a t i n g ! ' ( ) n l u ( l f i) r r ' c \ r ' s p c c r l l l r r r r I ) l i . - l h c y ' l i r t r n t l th a t t h e r o t l - 1 1 1 1 . ' , ' l i r l t t t r r l a o l ' . 1 . t , ; r r ' i , i , ' r l r ) t ) f ) r , l : r r ' . . : - l t ! t - t f t l r r i o r c e c l u n r - , t ' . , i r 1 : ! t ( r ' c l u f l t s [ o l e l ( ) u t d r c . r t i n u r . i r t r . l t ' 5 f l-lillllll()11 ) h : l i r r C t I c t l i s p l u u c l r l c l l l r c t t l r t l s
, ) / c r { , t r e s r t l r r l l tl c l i l r l r a l r o n b e lt r r c p h v s i c a l p l i l i c l , . ' - ' l r . l r , r l l ( ) n ) \ h r c l r r s a l D ( ) r c rc a l l s t l c r c s u l t t h l n t h e l | r , l L l t r r r r r r . r o r r l Y u s c t l l i n c l r a p p r o a c h . l - h c r ir e r ' l l l t t l t i s o l t t t r o t t . s \ \ ' c i c , ' ( ) : l f l i : 1 , . ' r l e r t d f i t r r r r r l t , r h c , l r , . r l l o r ' \ p c n n t c n t a l r c s t r l t . , t l t r 0 u g l t c u t ' r ' e t , i t : ; .
l L a l i t 1 9 9 9 ) t h c r e l i r r e d e v e l o p e d a m o d e l b y '
lncorporatrng the theorres prcsented abovc into the Dti
p r r n c r p l e t o s t u d l t l r e i n t e r a c t i o n o f ' p a r t i c u l a t e
rnaterials. 'l he nrodel basetl on an eal'llcr m<ldel by Ng
( l9ti9) lbr particulate soil and rock nratcrials was
nrodiflc'd to handle agricultural materials. The model as
r c p o r t e d b y R a j i a n d F a v i e r ( 1 9 9 8 ) . F a v r e r c , r u l ( 1 9 9 9 ) rncorporated a non-linear delbrnration-dependent
condition lbr viscoelastic mate rials into an elastic
nrodel for spherical matenais as stateci wrth algorrthms
lo handlc chang,e ln shape oJ' the partlcles dunng
Ioadrrr-u. a condition rvhich rs normally ncglected in
I ) t r M .
l-he rnodcl also incorporated real containing
rralls nrodcllccl as flat surt-aces. In inrpact studies only
one \\'all or llat surlhce on rvhich the partrcle(s) sill
irnpact is necessary and in drop impact only the gravitl'
lirlce is rn play be fore impacl except w'herc drag lorcc
ls vcry neccssar)'. IroL a body talling on a surfice liont a
herglrt thc initral total cncrgy is equal to the potcrrtial cnergy n'hich rs proportional to the mass and drop
height and it is represented b."" the area under the
forcc-dclirrnratir-rn curve. The energy on thc obJcct
rrru.ncdralely alicr contact rvhen the particle escapes
il om the sul lirce is e qual to the kinetic cnergy
rcnraining on the object after contact. This is equal to
tlrc arca behind the rebound contact recovery curvL' ln a
l ; - D p l o t ( l t a 1 r . 1 9 9 9 ; R a j i a n d F a v i e r . 2 0 0 2 ) . - l - h e
drl'li're ncc qive s thc energy tlissipated
1 l e t h o d "l'lrc
I{a1r (1999) nrodel rvas used to predict the
bchar,iour of a single spherrcal rubber ball dropped
l l ' o r r r 1 0 . l- i . 2 0 . a n d 3 0 c m o n t o a h a r d l' l a t s u r f a c e . A
conrprchensrvc description of the nrodc of operation of
tlte rnodel can hc fountl in Rati (1999) and l{a.1i and
l j a v i e r ( l 9 ( ) 8 ) . ln o r d e r to r a l i d a t c tl r e re s u l t s o b t a i n e d litur tltc nrodellin-s fbr intpact process. available
experimentul an(l theoretical results ([-rchtensteiger t,l
r r l . 1 9 8 8 ; Z h a n g a n d W h i t t e n . 1 9 9 6 ) o n i m p a c t s t u d i e s
lbr spherical rubber balls using drop tests rvere selected
for comparison. The results of these studies rvere used
for comparison because the instrumentatron and the
precision of the inslruments used in data recording nrakes thc results more reliable than other available lcsults. l'hc paranreters detcrnrined drrrirrg the
expennrent also covered a r"ide range of paranleters
requirccl for a bettcr undcrstandine of inrpacl processes
'lable
I shou's the physical propertres of the rrrbbcr
b a l l s u s e d i r r th e e x p e r i n l e l r t s r n d s i n r u l a t i o n s . ' l ' a b l c
I : l ) : r t i r u s c ' d i n s i n r u l a t i o n a s o b t : l i n c d l' r o n l L i c l r t c r r s t c i g e r d u l ( 1 q 8 8 ) f o r A D I I I ' l l b : r l l s ( l t i g i r l i n \ l o r l r r l u s : 1 . 0 0 \ l l ' u . F r i r t i o n c o e l l ' i c i c n t : 0 . 5 . I' o i s r , r t r r u li i r : 0 . J l ) .
D i a n r c t c r ( i i c l l l c r c n t t l l '
\ l r \ l { ! l
' I
r r n e s t c p l t i s l
- i . . , ( ,
< t ' :
t n l
l ' ) l
t , ; I l , l
: i , i ) ;
( I ( r - i i r
r ) { r l )
t l r \ J ( )
"1
Raji, A.O. and Favier, J. F. / LA(.TECH Journal of Engineering and Technot's! t ( I ) 2003: I :-25
S i n r u l a t i o n
Numerrcai srmulatrons of the lmpact of mbber balls and apples were performed using the neu qqmpuler programme rvith the rheological
model for viscoelastic materials as explained above
i.e. the Raji (1999) model. The properties of the
materials from the experiment of Lichtensteiger et ul
( 1988 ) (Table I ) were used in the computer
simulation lbr rubber balls while those of apple \\ere
obtained liom the literature (Mohsenin et ul, 1918,
Mohsenin 1986). The rrgidity modulus of the rubber
n r a t e n a l i s 3 . 0 M P a In the srmulation. srmrlar
to the experiment. the heavy and rigid base was
simulated as a flat rvall wrth infinite radius of curvature and high strength propertles compared to the spherical material impacting upon it. Each
simulation involved creating a spherical particle rvith
the appropriate physical properties and geometry at
t h e d e s i r e d h e i g h t o f f a l l ( 1 0 , 1 5 , 2 0 a n d 3 0 c m ) .
Impact data (fbrce, velocity, and displacement with
time) during the first impact and the peak values during the other impact were recorded for every
cycle (single time step) until the particle came to rest.
It is to be noted however, that the data in the
erperimental report in Lichtensteiger et al (1988) did
not extend as far as particle equilibnum (comrng to rest).
RESULTS AND DISCUSSION
The simulation results obtained for the ADRUB rubber ball were compared rvith the
experimental results reported by Lichtensteiger e/ d/
(1988) as a forrn of validation of the contact model and suitability of the DEM for the experiments
discussed above. Analysis of the agreement of the
experimental and simulation results were done statistically using both analysis of variance and
studentised-t tests to confirm significance.
Validation with Rubber Ball
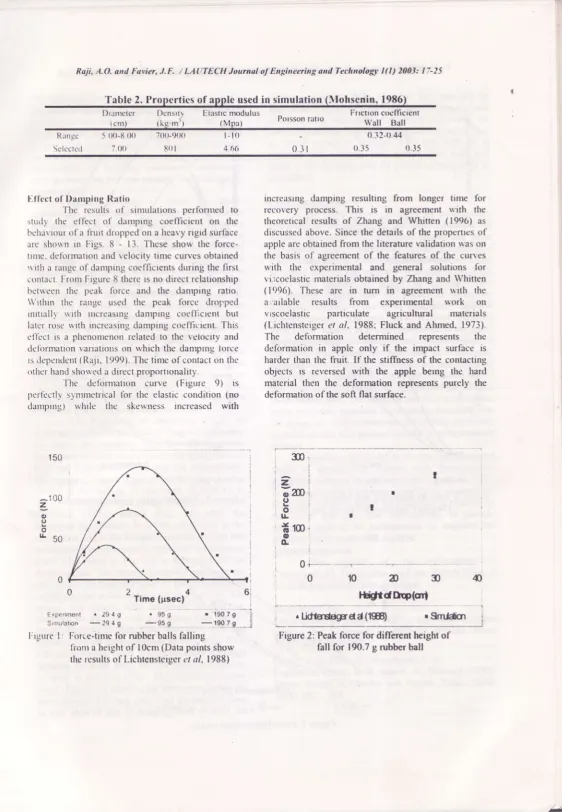
The force-time curyes during the first impact and the effect of mass obtained from impact of three rubber balls of different weight dropped from a height of lOcm on a rigid plate are as shown in Figure l. The simulation results using the properties and geometry presented in Table 1 were
compared with the experimental result of
Lichtensteiger et ol ( 1988) on the same material and
set up. A critical time step for the simulations range
between 4.1 and 4.6 ps and these coincidentally are
within the range of 2-10 ps used in data recording in
the experiment. Simulation results showing the peak
force and time of contact for the first impact when dropped from heights 10, 15. 20 and 30 cm ploted
with those of Lichtensteigers' are presented in
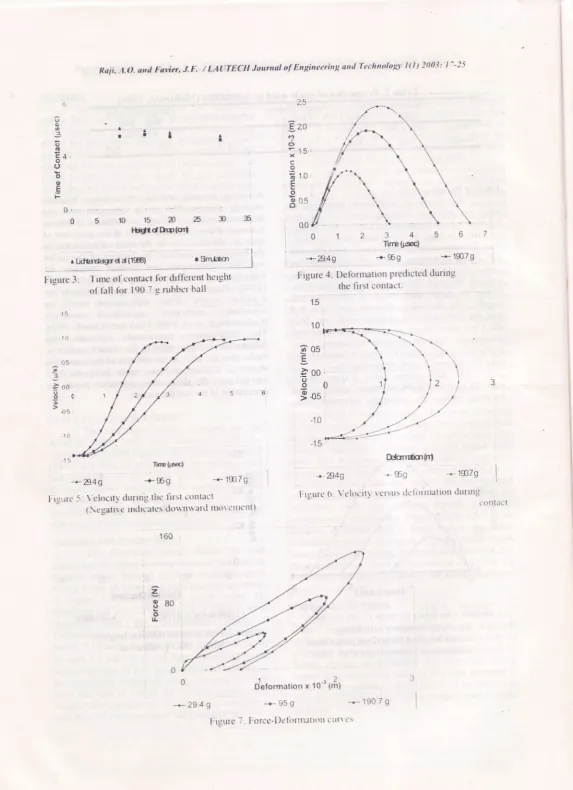
Fr-eures 4 and -5. -fhe delbrmatron and !eloclty obtaincd
with time and velocity-deformation curves lor the llrst
impact in the l0 cnr drop height are presented in
Figures 4 - 6 rvhile the fbrce-deformation curve fbr
each of the test is as shor,vn in Figure 7 although these
a r c r r ( ) t r e p o r t e d b y L i c h t e n s t e i g e r e t u l ( 1 9 8 8 )
Ciood agreentent was obtarned betrveen the
s i n r u l a t i o n r e s u l t s a n d L i c h t e n s t e r g e r e t u l ( 1 9 8 8 ) d a t a w i t h l n a l y s i s s h o w i n g th a t t h e r e w a s l t o s r g n i f i c a n t d r l l u r c n c e ( p > 0 . 0 5 ) i n t h e e x p e r i m e n t a l a n d s i m u l a t i o n
data ploned at dift'erent trme interval during rnrpact rn
Frgure I . The peak lbrces predicted by the srnrulation
w e r e 4 2 . i . 8 5 . 2 a n t l I i 7 . 7 N a s c o n . r p a r e d t o 4 0 . 8 7 . a n d
136 N tlom the experiment for balls u,,ith wei-qhts of
29.4, 95 and 190.7 _e respectively. This trend is also
similar in the sinrulation of drop unpact lbr the heaviest
ball, (l9l g), fiorn ciifferent heights (Figure 2) and the
p r e d r c t e d t l n r e o 1 ' c o n t a c t i s s l r g h t l y l o w e r in a l l c a s e s
(Figure -1). Analy'srs of both (peak fbrce and time of
contact) sliori,ed no srrlnrllcant drfference betu'een the
experimental and prer-licted ( p>().05 ).
Additional paranterers nor reported bi' L i c h t e n s t e i g e r s e t u l , ( 1 9 u 8 ) : d c t ' o r n r a t r o n \ e r s u s ti n l e .
velocity versus time and the force-detitrmation curves
are shown in Figures 4 - 7. From FiguLc 5. the escape
velocity for each ball is less than the conracr velocitl'
since rubber is not a purely elastic nraterial and energv
was dissipated tlrrough darnping. The contacr '"elocrrrcs
(1.-5 nvs) are equal as all the balls were dropped lionr
the same height while the escape velocities were verv
close (no significant difference. p>0.05) for all three
cases. This is because their coeffrcients of restitution
are very similar but the time of contact differed due to
their differences in size and weight. The ball regained
its deformed portion gradually after reaching the maximum while the velocity started increasing.
conesponding to unloading (Figure 6). The effect of the
damping is shown with a sharp rise in the force-deformation curves in Figure 7 at the initial region
where some of the energy at impact was absorbed. The
force-deformation curve is therefore a loop with the
area within the loop representing the energy dissipated
as will be seen later.
Validation rvith Apples
The results reported above show that the
non-linear viscoelastic contact model is a good
approxin.ration for predicting the contact behaviour of
viscoelatic materials. Therefore this model rras used lbr
further studies on predicting the behaviour during
impact for a viscoelastic material. The data presented rn
Table 2 are properties of apple fruit used for simulation
Raji, A.O. and Favicr, J.F. / LAIITECH Journol ot Enginuring and Technologl' I(l) 200i: I7-25
Table 2. Properties of apple used in simulation (llohsenin, 1986)
Dianrctcr L)cnsrty', Etastrc modulus( c n r ) l k g i m r t ( M p a l Porsson ratro
Frrction coefficient Wall Ball
R a n g c
S c l c c t c d
5 (X)-8 0() 7(Xl-9(.Xl 7 . ( X ) E ( ) I
l - l ( )
4.(16
0 . 1 r
0.32-0.44
0.35 (_).15
tlll'cct ol' Danrping Ratio
J'he r.esults of sinrulations perfolmed to
stutll' the eff-ect of darlping coefficient on the
bcha"iour of a thrit dropped on a heavy rigid surface
lre shown in Figs. 8 - ll. These show the
force-tinre. delbrmation and velocity tinre curves obtained
rvith a range of damping coefticients drrring the first
contact. From Fisure 8 there is no direct relatronship
bctu,een the peak fbrce antl the dampin-rl ratio. \\'rthin the range used the peak forcc dropped
rnrtrallr, * ith increasrng danrping coel'llcrent bul
later rose rvith increasing danrping coeftlcrcnt. Tlris
efl'ect is a phenonrenon related to thc vciocitv artd
tleltlrmation r,ariations on u4rich the danrprng lorce
rs depe ndent (Ra1i, 1999). -fhe tinre of contact on the
rrthcr hand shorved a direct proprlrtronality.
'fhe
defirrnrrtion curve (Figure 9) ls
pcrf'cctll s1'nrrnetrical lbr the elastic condition (no
tlanrprng) rvhile the skeu.ness increased with
0
E x p e r t n r e n t . 2 9 4 g
increasrng damping resulting from longer tinre for recovery process. This is ln agreement s'ith the theoretical results of Zhang and Whitten (1996) as
discussed above. Since the details of the propertres of
apple are obtained from the literature validation \r'as on the basis of agreement of the features of the curves u'ith the experimental and general solutions for
vi:;coelastic materials obtained by Zhang and \Vhitten
(1996). These are in turn in agreement wrth the
a.'ailable results from experimental rvork on
vrscoelastic particulate agricultural materials
{Lichtensteiger et al. 1988: Fluck and Ahmed. 197-1).
The defomration determined represents the
deformation in apple only if the impact surface is harder than the lruit. If the stiffness of the contacting objects rs reversed rvith the apple berng the hard material then the deformation represents purely the defomration of the soft flat surface.
0 +
-0 1 -0 n s
ttiCttdt}lpftrrf
. U<ftgddgsdd(1S)
. Smldftn
Figure 2: Peak
force for different height of
fall for 190.7
g rubber ball
m
z l
i m
-g l
o
l t ,
f; tCI:
o
c
z
o
()
l ! c n
4
S l n u i a t r o n - 2 9 { g - 9 5 9
Time (psec)
o y J 9
6 i
.-l . 1 9 0 7 g i i
-ts-9,2 g----li
ljr-!.1ure l: Force-time lbr rubber balls falling
li'onr a height of lOcm (Data points show
the rcsults of Lichtensteiger cl a/. 1988)
25
€ro
I o ; 1 s .9
a ! t . v
E o o n q
o0
36A I u
o o 1 o ro E 4 '
g
()
o oE
F
o 0 5
g
F o o
o o
u
9 o s
_1.0
-15
Raii, A.O. and Fovier. J.I- / LAITTECH Journal ofEngineering and Technology l(l) 2003: l;-25
1 0 r u ; ;
}}ryrdIIEPlcrl
3 4 5 6 line(psec)
Figure 3: Time of contact lbr different height of l'all for 190.7 g rubbcr ball
l 5
*9.49
Figure 4: Deformation predicted during the first contact.
&ffiin(nl
I
*2p,4g -$9 * 1S.79
I
Figure 6: Velocity versrts tlclirrtnation durtng
c o l l l a c t
* s g
i - 1 s 7 0
l o
o 5
6 a
5 o o
oo o
o 5
*r,A;
Irre{Fecl
* s g
Ijigure -5. \'elocity during thc llrst contact
( Negative indrcates dorvnrvard movcnlttrt)
160 ,
* 1$.79
o
deformation x ro-3 (ri)
+ 2 g . 4 g * 9 5 g * 1 9 0 . 7 g
F igure 7 : Irorct'-Delirrnultorl c tlrvcs
Rtji,.l.O.tndF'ayitr,J.F. iL..ll|TECHJouruololEngineeringondTechnoloKt'l(l)2003:11-25
'l'he
defbrmation therefore in this case can give the
tlrrckness of the nratenal that could be used as a safe
paciding surlace tbr apples dropped fronr the given
herght. Report on lirrtlrer studics ou this aspect rvill
bc prcst-ntc'd in another paper. 'fhe inlbrmation lionr
suclt tests could be used in thc design and n.ntenal
spccification tbr handling nlachrncry colnponcrlts
such as conveying belt and packrng materials during
transpollatron.
Figures I I and 12 show tlre force-delbrnratron cun'es and the energy during contact
respcctively. l'he energy absorbed (Fig. l2) sho'*,n
by the sharp rise (Frg. I I ) in the initial slope on the
curves increased with increasrng damprng
coefficient. The slope of the damped region
lcpresenting the energy absorption ls dependcnt ori
thc matenal proper-ties. r.e. tl're degree of
homogeneity of the object (Lichtensteiger et (r/.
1988) and the time step between data points. I'he steep slope or sharpness of the dampcd rcgion
(alrrrost parallel to the y-axis) when con'rpared to that
o l ' Z h a n g a n d W h i t t e n (1 9 9 6 ) i s d u e t o t h c s o f t e r
rriaterial used (apple) and the tinre step used in data
rcccrrclrng (rnrcro seconds). Lichtensteiger ct al
(1988) tiruncl that this slope is more pronounced
(alrnost parallel to the r.ertical axis) for soft objects
rrith tough skrn uirrch they referred to as the skin
elll'ct but this is not nrodelled in this study
-l-he
coelficrent ol' rcslltutlon (COR) of
applc reportedly lies betrveen 0 .1 and 0.7 depending
on variety and nraturit\'. -l'herefbre the behavrour
Ircs on and bctr"ccn thc curves lbr dan'rpin_q ratios of
0 . 0 7 a n d 0 2 8 ( ( ' O R o l ' 0 . 8 a n d 0 . 4 r e s p e c t i v e l y ) . 'l
he energy at ilupact, rvhich is the maxinrum kinetic
c n c r u v o l ' t h e b a l l i n a l l t h e c a s e s ( 0 . 2 3 6 9 J ) , i s
c<lnvclted rnto potential energy (rising curve) and
rccorered (lalling curve) (Fig. 12) after the nraximunr defornution. It is fully recovered in the
elastic case and in the damped cases the amount lost
or dissipated (un-recovered) (indicated for damping
coctl. 0.2ti culve in Fig. l2) is depender.rt on the
danrping ratio. l'he energy dissipated represents the
area u'ithin thc loop in Figure I I for each damping
coefflcient ancl is shol'n for each in Figure 12. The
energy u,as alnrosl fully corrverted to heat i.e.
absorbed lbr tlrc case rvith a damping ratio of 0.59
losing alnrost 90 "4, u'hile 85'Nr.7 5Vr, 60ol', 35Y" and
0 ' l i , u r - - r e l c s t |< r r d a r r r p i n g r a t i o s o f 0 . 4 6 , 0 . 2 8 , 0 . 1 6 ,
0.07 and 0.0 rt':pectrvelv. For all the cases ryith high
.lanrping the peak lirrce antl the peak detbrnution
occurTerl at driltlcnt Lrrnes. 'fhe displacenrgnt-trme
curvc ( [:i_r]ure l 3 ) sho$'ing the movement during the
crrtilc proccss lirr each case until the particle came
tc rcst. shoucrl that at tlanrping ratio of 0.59. the
system was almost fully damped. This may not be applicable to apple. as it may not have a danrping ratio of 0.59 except when rotten but sen'ed to illustrate the effect of damping. The range applicable to apple lruit as stated earlier is betu,een 0.07 and 0.28. It is expected that damprng ratio greater than 0.59 *ill resuh in full danping u'rth the partrcle gettlng stuck to lhe surface.
C O N C L U S I O N S
The DEM rvith its capability for incorporating characteristic theories and constitutive equations f-or various operations on particulate media has been successfully used to model the impact process in a selected agricultural material. The extension of DEM to impact analysis was validated with data on ADRUB balls, and applied to apples to provide some fr ndamental insights into the impact of particulate materials, without recourse to destnrctive real-life experimentation. Although only selected damping values were studied in impact simulation of the apple fruit on a hard surface the agreement in the features of the curve representing the behaviour of viscoelastic materials with available results sho*'ed that using the
appropriate parameters, the technique is a useful tool in
the prediction of damages to agricultural particulates under impact load. The model is therefore a useful tool
and a promising approach for obtaining necessary data
for design of some components of handling machinery
in direct contact with product in order to reduce impact danrage.
Howel'er the model as al now. approximated shape of particles as spheres with homogeneous
properties, whereas the real agricultural particles differ
in varying degrees from these simplifying assumptions.
Hence the extent to which the behaviour is affected by the shape and size and homogeneity in particle structure need to be incorporated to improve the
accuracy of the predictions in DEM.
Acknowledgement
The support of the Association of
Commonwealth Universities and the British Council
for AOR is grate fully acknowledged.
REFERENCES
Chen. P. and R. Yazdani; (1991). Prediction of apple bruising due to impact on different surfaces.'Trans A S A E , 3 4 ( 3 ) : 9 5 6 - 9 6 1 .
Diener, R. G: Elliot. K: Nessebroad, P. E;
Raji, 4-O. and Fovier. J.F. / LAUTECH Journat of Engineerittg and Technologl' I ( I ) 2003: l7-25
Favier. J. F: Abbaspour-Fard. iVl. II: Kremmer.
M. and A O. Raju (1999i. Shape representation of
axi-symmetrical. non-sphencai partrcles rn drscrete
elenrent srmulatlon usrng nruttr-eienrent nlodei particles. Engineering Computatlons: lnt. Jour, lor Computer Arded Engrneerinu and Softrvare 16(4): 467-{80.
Favier. J. F. and A. O. Rali: (2002). Drscrete elenrcnt nrodelling of deformation in viscoelastic particulates under bulk compressive loading:
Theory, Model developmenl and Validation. Journal
of Food Engineering. Communicated
Fluck. R. C. and E- M. Ahmed; (1971). Impact tests
of fruits and vegetables. Trans ASAE, l6(4):
660-66s.
Herold b: Geyer m. and C. J. Studman; (2001). Fruit contact pressure distribution equipment. Computers
and Efectronics in Agriculture, -12(3): 167 - 179
tlyde, G. M; Brown. G.K; Timm. E. J. and W. Zhang: (1992). Instrumented sphere evaluation of
potato line impacts. Trans ASAE 35( I ):
65-69-Holt, J. E; Schoorl, D. and C. Lucas (1983). Prediction of Bruising in Impacted Multilayered
Apple Packs. Trans ASAE 24(l):242 - 247.
Holt, G.E; Schoorl, D. and C. Lucas; (198-s). A
theoretical and experimental analysis of the effect of
srrspension and road profile on bruising in multilayered apple packs. Journal of Agncultural
lingineenng Research, Vol. 31.
Kafui, D- and C. Thomton; (1991) Computer sinrulated impact of agglomerate. Pouder and Grains 91, the Proceedings of the 2nd Int.
Conference on Micromechanics of Granular ivledia.
A. A. Balkema, pp.40l-406.
Lichtensteiger. M. J; Holmes, R. G; Hamdy. M. Y.
anl J. L. Blaisdell: (1988). lmpact parameters of spherical viscoelastic objects and tomatoes. Trans , \ S A E 3 l ( 2 ) : 5 9 5 - 6 0 2 .
\l;rtherv R and G. M. Hyde; (1997). Potato Impact
drnrage threshold. Trans ASAE,40(3): 705-709
McGlone V. A; Jordan. R.B. and P. N. Schaare; { 1997a). Obtaining mass from fruit Impact response.
l ' r a n s A S A E : 4 0 ( 5 ) : l4 l 7 - 1 4 1 9 .
McGlone \.'. A: Jordan. R.B. and P. N. Schaare: ( 1997b). Mass and drop-height influence on Kirvifruit fumness by impact force. Trans ASAE, -t0(5): l42l - 1428.
\,lohsenin. N. N: (1986). Physical progerties of plant
and animal matcrials. 2nd ed. Gordon & Breach
Sciencc- Prrbl: \erv York.
M o h s e n i n . N . N ; J i n d a l . \ ' . K . a n d A . N . M a n o r : (1 9 7 ) i )
Mechanrcs of irrrpact ol'a tallrng fmrt on a cLrshroncd
s u r f a c e . T l a n s A S A E 2 l ( 5 ) : 5 c ) - l - 6(X)
\ g . T . ' I . ( 1 9 8 9 ) . N u r n e r r c a l s i r r r u l a t i o n o l ' g r a n u l a r soil under monotonlc loadrng: A partrcle nrcchanrcs
approacir. Ph.D 'fhesis. I{cnselvrcr Polytlrechnrc
lnstitute. Neu York.
N i c o t t . F : C a m b o n . B . a n d G M a z o l l a n r ( 2 0 0 1 ) . D e s i g r r of a rocklall restraining net using discrete elerncnt
rnodelling. Rock Nlechanics lingrneering. 3.112): t)11
I I E . N i n g Z : I J o e r e h . j n , R . ( i h a d i n . N I . a n d ( ' Thornton ( | 997b). Drscrete clemenl simulation ol'
inrpact breakage ol- lactose utulorneralc's. Aclvanced
P o w d e r ' I e c h n o l o g y . V o l . l : l j - 1 7 .
P a n g , D . W : S t r r d r n a n . C ' . J . a n d N . I l B a n k s . ( 1 9 9 . 1 ) .
Apple Tlrreshold fol an Inslnrtncnted Sphere. 'l'rarrs
A S A E 3 7 ( 3 ) : 8 9 1 S c ) 7
R a j i , A . O ( 1 9 9 9 ) D i s c r e t c c l e n r c n t n r o d c l l r n s o l ' t h e d e f o r m a t i o n o f b u l k a q r r c u l t u r a l p a r t r c u l a t c s . . U n p b l i s h e d P l t . D f h e s i s . L I n i v c ' r s i t 1 ' o f ' \ c r r c a s t l c -upon-1';"ne.
R a j i , A . O . a n d J . F . F a r i e r ; (1 9 9 8 ) . D i s c r e t c c l e n r c n t modelling of delbrnration in particulrlc arncultulal
materials under bulk conrpressire ltladirrg. Pupcr No.
98-F-04-5. International ('onlL'rcrrce on Aulrcrrltirral
Engineering, Oslo.
R a j i , A . O . a n d J . l : . l r a v i e r ; ( 2 ( X ) 2 ) . [ ) r s c r r - t e l i l e n r e n t
Moclelling of the lmpact l)aranrctcrs of a Sclectcd
F m i t : A p p l i c a t i o n . J o u r n a l o l ' A p p l r e d S c r e n c e a n d T e c h n o l o g l , l ( 2 ) . I n p r c s s .
S c h e n r b r i . \ { ( i . a n d I l . I ) . I I a r n s : ( 1 9 9 ( r } . \ l r r r l c l l r r u i r n p a c t r l n a b i o l o e i c a l n n t c l r u l ( s u u a l c a n e ) t l s l l ' l r D E M . I ' a p c r n o . 9 ( r l : - 0 7 2 . I n t ( ' o r t l ' . ( ) n A:lricultrrrll
Engineering. Nladrid.
Schoorl and Holt; ( l9S0 ) [Jnrrse re srstilncc
measurements irr apple. Jourrtal o1"l'e rture Stuth.'s I I :
389 - 394
S i y a m i , S ; B r o s t , G . K ; B u r g e s s . ( i J: (lcrrrslt. - 1 . I l : T e n n e s . B . R : B u r t o n . C . L . a n c l R . l l . Z a p p . tl 9 f i S )
Apple impact bnrise predictiott motlcls -['r.rns ,\S.\l:
3 l ( 4 ) : 1 0 3 9 - 1 0 4 6 .
S r u d m a n . C . J : ( 1 9 9 0 ) . A p p l e h a n d l r n s d a n t a s c r r t \c t r Z e a l a n d . A S A F - P a p e r N o 9 0 - 6 0 1 9 S t J t ' . c | l t . Michigan.
Tennes. B. R; Zapp. tL R; N'larshall l) l: unrl l' I{.
Armslrong: ( 1990). Apple lrandlirrg unpacts rluta
acquisition and analysis u'ith an instnrnrcntcll sphcrc.
I
q
=
Raii, .4.O. ani Favier, J.F. / 1..41'TEC|l Journol o! Engineeriug and Technologlt l(I) 2003: l7-25
'fhomton.
C: Yin K. K. and M. J. Adanrs; (1996). Nunrerrcal solutlon of the impact fracture and fragmentatron of agglomerates. J. Physrcs D: ,\ppf red Physics 29: 424435.
Timoshenko. S. P and J. N. Goodier; (1970). Theory
of Elasricity. Third Edition. McGraw tlill. tokyo.