Digital Simulation of Predictive Current Control
of Inverter with Future Reference Consideration
using MATLAB
Arya Jyoti Deo Bibhu Prasad Panigrahi
PG Scholar Department of Electrical Engineering Department of Electrical Engineering
Indira Gandhi Institute of Technology, Sarang, Dhenkanal, India
Indira Gandhi Institute of Technology, Sarang, Dhenkanal, India
Abstract
This paper presents the current control of two level voltage source inverter (VSI) designed in a discretized model using model predictive control (MPC) technique. MPC basically deals with the minimization of cost function of the system. Cost function is a measure of error between the measured value and the reference taken. But if the sampling time of the discretized model is quite large then a delay will be observed during the application of the control technique. The delay compensation is done with the consideration of future reference value in the cost function formulation. The optimized voltage vector obtained by this method results in a output load current with reduced ripple content. The simulation results obtained without and with delay compensation are discussed.
Keywords: Cost function, Delay Compensation, Inverter, Load, Predictive Controller
________________________________________________________________________________________________________
I.
I
NTRODUCTIONPredictive control is not a specific algorithm rather an approach for the control design. According to the mode of control it can be classified in various ways. Control scheme[4] like dead beat control deals with the minimization of error where as the hysteresis control decides whether the evaluated variable is within the tolerance band or not. The control scheme discussed in this paper is model predictive control which basically deals with the minimization of the cost function of the system. In this method the model of the system is used to predict the future value of the variable up to a predicted horizon in time and the optimum sequence is obtained. According to receding horizon strategy, the controller used in MPC applies only the first element of the sequence. But the optimization problem is solved for every sampling instant with the comparison between the measured and the new sequence of optimized data available after each of the sampling instant. For proper operation, all possible switching sates are evaluated and the corresponding optimal value is stored to be applied next [2]. If the sampling time taken is more, then the calculation time is quite significant. Hence there will be a delay between the instant of current measurement and the instant of new switching state application. This results in an oscillation of the load current around its reference with the increase in the ripple content of the measured current. The reduction in the ripple can be obtained by compensating the delay observed by evaluating the cost function using the future values of the reference currents.
II.
C
ONVERTER MODELThe three phase two level voltage source inverter circuit model used is shown in figure-1. The switches Sy , y=1,2,…6 are
operated in complementary mode and the voltage signal takes a value of 1 if switches of the upper leg are ON, otherwise the signal value is 0.
Depending on the switching signals the output phase to neutral voltages of the inverter can be described as:
)
4
(
)
3
(
)
2
(
d c cN
d b bN
d a aN
V
S
V
V
S
V
V
S
V
Fig. 1: Circuit Model of Two-Level Inverter
The output voltage vector of the VSI can be defined as:
)
5
(
)
(
3
2
2
cN bNaN
V
V
V
V
Where the unitary vector λ=1<1200 implements a phase displacement of 1200.The voltage vectors are shown in Figure 2.In
this figure only seven different voltage vectors are shown as the vectors
V
0 andV
7,both are null vectors.Fig. 2: Voltage Vectors in Complex Plane
III.
L
OAD MODELA three phase RLE load is used to illustrate the effect of the predictive controller [1]. The vector equation for the load current dynamics is as follows:
)
6
(
dt
d
L
R
V
Where I and E represents the load current vector and the load back emf vector respectively and can be explained as
)
8
(
)
(
667
.
0
)
7
(
)
(
667
.
0
2 2
c b a c b ae
e
e
i
i
i
In Eq .(7) and Eq. (8) the terms ia,ib,ic and ea,eb,ec represents the corresponding phase currents and phase voltages respectively.
IV.
W
ORKING PRINCIPLEThe discrete-time model of Eq.(6) for a sampling period of Ts can be obtained by replacing the derivative term
dt
di
by Euler’s
approximation formula [2] as follows:
)
9
(
)
(
)
1
(
sT
k
k
dt
di
When Eq.(9) is substituted in Eq.(6) the resulting equation is as follows: a b c Vd VNn S1 + _
S3 S5
S4 S6 S2
Real-axis
V1
V2 V3
V5 V6
V4
V0 , V7
Imaginary-axis
0 , 0 ,
0 1,1,1
(
)
ˆ
(
)
(
10
)
)
1
(
)
1
(
V
k
E
k
L
T
k
L
RT
k
s sp
where Ip represents the predicted value of the load current for the (k+1)th instant, when load current I(k) is applied at kth instant.
The term V(k) and
ˆ
(
k
)
represents the voltage and estimated value of back emf vector at kth instant. The load back emf can be calculated by the following equation.)
11
(
)
1
(
)
(
)
(
)
1
(
)
1
(
ˆ
k
T
L
R
k
T
L
k
V
k
s swhere
ˆ
(
k
1
)
is the estimated value of
(
k
1
)
. As the frequency of the load back emf is quite less than the samplingfrequency so it can be assumed that
ˆ
(
k
)
=
ˆ
(
k
1
)
.V.
D
ELAY COMPENSATIONIf the difference between the calculation time and the sampling time Ts is quite significant then there will be a delay for the
application of optimized switching state. During the evaluation of the optimized cast function the old switching state will continue to apply.This delay can be compensated by estimating the load current value, using the optimum voltage vector [1] as:
1
1
(
12
)
ˆ
V
k
L
T
k
L
RT
k
s
s
Where
ˆ
k
1
is the estimated value of load current at (k+1)th instant obtained by using the current value at kth instant,
k
and the optimum vector at kth instant.Using this estimated value of current the prediction process is repeated with the load shifted by one step forward in time domain. The estimated current for the next instant is
2
1
ˆ
1
1
(
13
)
ˆ
V
k
L
T
k
L
RT
k
s sWhere
V
k
1
is the voltage vector at (k+1)th instant.Then the modified cost function is evaluated on the basis of future error considering the future values of the measured and reference current as follows:
)
14
(
)
2
(
)
2
(
)
2
(
)
2
(
_ _ _ _
i
k
i
k
i
k
i
k
c
ref p ref pWhere
i
_ref(
k
2
)
andi
_ref(
k
2
)
are the values of the reference current at (k+2)th instant calculated by using Lagranze’s extrapolation formula as follows;
k
2
6
i
k
8
i
k
1
3
i
k
2
15
i
ref ref ref refThe switching state that minimizes the modified cost function is selected and stored to be applied in the next sampling instant.
VI.
S
IMULATION RESULTSThe MATLAB/Simulink model [2] used for the predictive current control of the VSI is shown in Figure 3.
Fig. 3: Simulink Block Diagram for Simulation of Predictive Current Control
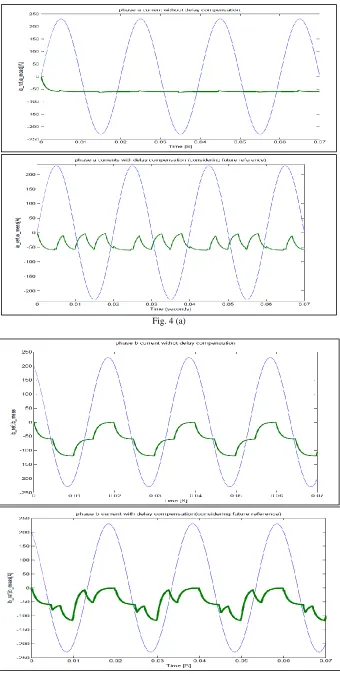
Fig. 4 (a)
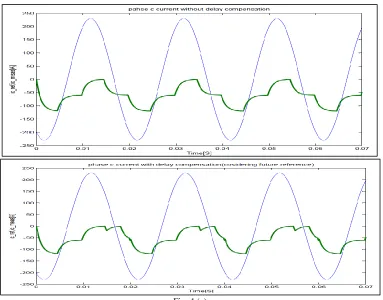
Fig. 4 (c)
Fig. 4: Comparison of Simulation Result Of Output Current With Reference Current Without And With Delay Compensation (A) For Phase A (B) For Phase B (C) For Phase C.
VII.
A
PPENDIX System Parameters:DC link voltage: Vd= 600 V; Sampling period, Ts=50μs; Resistance: R=10Ώ; Load Inductance: L=10mH; Back emf: E=100V;
A
CKNOWLEDGMENTThis work is completed successfully by the constant support from Prof. Bibhu Prasad Panigrahi, Head of the Department and all faculty members of Electrical Engineering Department, Indira Gandhi institute of technology, Sarang, India.
R
EFERENCES[1] J. Rodriguez, P. Cortes, Predictive control of power converters and electrical drives,1st edition, John Willey & Sons,Inc.,2012
[2] J. Rodriguez, J. Pontt, C. Silva, “Predictive current control of voltage source inverter.” IEEE Transactions on Industrial Electronics,vol.54, no. 1, pp. 495-503, February 2007.
[3] P. Cortes, J. Rodriguez, D.E. Quevedo, and C. Silva, “Predictive current control strategy with imposed load current spectrum,” IEEE Transactions on Industrial Electronics, vol. 23 ,no. 2, pp. 612-618, March 2008.
[4] J. A. Rossiter, Model based predictive control: a practical approach, 1st edition, CRC Press, 2005.
[5] N. Mohan, T. M. Undeland, and W.P. Robbins, Power electronics, 3rd edition, John Willey & Sons,Inc.,2003