DEVELOPMENT OF HYBRID FORCE-POSITION CONTROLLER FOR ULTRASOUND-GUIDED BREAST BIOPSY ROBOTIC SYSTEM
MOHAMMAD AFIF BIN AYOB
A thesis submitted in
fulfillment of the requirement for the award of the Doctor of Philosophy of Electrical Engineering
Faculty of Electrical and Electronics Engineering Universiti Tun Hussein Onn Malaysia
MARCH 2018
PTTA
PERPUS
TAKAAN
TUNKU
For my beloved parents & my dearest partner, Nurasyeera.
PTTA
PERPUS
TAKAAN
TUNKU
ACKNOWLEDGEMENT
Alhamdulillah. Praise be to Allah.
I would like to take this opportunity to express my sincere appreciation to my supervisor, Dr Wan Nurshazwani Binti Wan Zakaria for without her enthusiasm, encouragement, support and continuous optimism this thesis would hardly have been completed. I also would like to thank my co supervisor, Dr Jamaludin Bin Jalani for his advice and direction of this work.
This thesis would not have been possible without the inspiration and support of a number of wonderful individuals – many thanks and appreciation to all of them for being part of this journey and making this thesis possible. Acknowledgement also goes to Coldplay for constantly being inspiring and motivating during my ups and downs in this research.
And finally, last but by no means least, special thanks to my family members for their motivation, unparalleled love and emotional supports.
Thanks for all your encouragement!
PTTA
PERPUS
TAKAAN
TUNKU
ABSTRACT
Conventional ultrasound-guided breast biopsy (UGBB) procedure is commonly performed to assess abnormal masses within the breast. It requires a radiologist to handle multiple devices at once, which could reduce the abilities in performing such procedure resulting in radiologist’s fatigue, compromised breast tissue due to multiple insertions and susceptibilities to pneumothorax complication for the patient. Previous studies have reported that many of the restrictions associated with handheld minimally invasive methods were tackled when physician assist instruments were used. Therefore, the purpose of this research is to assist radiologist in conventional UGBB procedure by introducing a semi-automated robotic system to maintain desired contact force between the ultrasound transducer and the breast. For that reason, a hybrid force/position controlled UGBB robotic system has been developed in simulation environment. The UGBB robotic system involves a 5 degree of freedom (DOF) articulated robot arm to control the transducer movement, a force/torque (F/T) sensor system to measure the contact force, an ultrasound machine to view the inside structure of the breast tissue and a computer-based control system. As such, the RV-2AJ robotic arm has been modelled with its positional accuracy of almost 100%. A breast model based on a medical grade breast phantom has been established with a mean error of 0.69% by using black-box modelling approach. Motion disturbance from human respiration has been explored as well since it plays a significant element that would affect the stability of the system to constantly maintain low contact force on the breast. Finally, intelligent Fuzzy-PID hybrid force/position controller has been successfully established to maintain low contact force on identified breast stiffness characteristics. The overall hardware-based simulation shows promising outcomes with almost no overshoot, fast rise time, high robustness and stability on different environment condition. In conclusion, the success of this work serves as significant foundations for long-term related research, especially in the development of UGBB robotic system and approaches of force control mainly for human-robot interaction.
PTTA
PERPUS
TAKAAN
TUNKU
ABSTRAK
Prosedur konvensional biopsi payudara secara ultrasound (UGBB) dijalankan secara meluas untuk menilai ketumbuhan yang tidak normal di dalam payudara. Ianya memerlukan pakar bedah untuk mengendalikan pelbagai alat pada satu-satu masa, yang mana boleh mengurangkan keupayaan pakar bedah dalam melakukan prosedur tersebut, mengakibatkan keletihan kepada pakar bedah, dan menjejaskan integriti struktur tisu payudara akibat kekerapan suntikan jarum biopsi. Kajian terdahulu telah melaporkan bahawa banyak sekatan yang berkaitan dengan kaedah pandu tangan invasif secara minimum dapat ditangani dengan menggunakan alat bantuan kepada doktor. Oleh itu, tujuan penyelidikan ini adalah untuk membantu ahli radiologi dalam prosedur konvensional UGBB dengan memperkenalkan sistem robotik separa automatik untuk mengekalkan daya sentuhan yang dikehendaki antara transduser ultrasound dan payudara. Atas sebab itu, satu sistem robot hibrid daya/posisi UGBB telah dibangunkan dalam persekitaran simulasi. Sistem robot UGBB tersebut melibatkan 5 darjah kebebasan (DOF) untuk mengawal pergerakan transduser, sistem deria daya/kilas (F/T) untuk mengukur daya sentuhan, mesin ultrasound untuk melihat struktur dalaman tisu payudara, dan sistem kawalan berasaskan komputer. Dengan itu, sistem robot RV-2AJ telah dimodelkan dengan ketepatan posisinya menghampiri 100%. Model payudara berdasarkan payudara silikon gred perubatan juga telah ditubuhkan dengan kesilapan min 0.69% dengan menggunakan pendekatan permodelan kotak hitam. Gangguan pergerakan dari pernafasan manusia juga telah dibangunkan memandangkan ianya memainkan peranan penting dalam memberi kesan kepada kestabilan sistem untuk mengekalkan tekanan yang rendah terhadap payudara. Akhir sekali, pengawal hibrid daya/posisi telah berjaya ditubuhkan untuk mengekalkan daya sentuhan rendah terhadap kekerasan payudara silikon yang dikenal pasti. Keseluruhan simulasi berasaskan perkakasan menunjukkan hasil yang memberangsangkan dengan hampir tiada lebihan respon, masa kenaikan yang pantas, kekukuhan dan kestabilan yang tinggi dalam keadaan persekitaran yang berbeza.
PTTA
PERPUS
TAKAAN
TUNKU
Kejayaan kajian ini merupakan landasan penting bagi penyelidikan jangka panjang, terutamanya dalam pembangunan sistem robot UGBB dan pendekatan kawalan daya untuk interaksi antara robot dan manusia.
PTTA
PERPUS
TAKAAN
TUNKU
CONTENTS TITLE i DECLARATION ii DEDICATION iii ACKNOWLEDGEMENT iv ABSTRACT v ABSTRAK vi CONTENTS viii LIST OF TABLES xi
LIST OF FIGURES xiii
LIST OF SYMBOLS AND ABBREVIATIONS xviii
LIST OF APPENDICES xxi
CHAPTER 1 INTRODUCTION 1
1.1 Problem Statement 4
1.2 Aim and Objectives 5
1.3 Scopes 5
1.4 Contributions 6
1.5 Publications 7
1.6 Thesis Outline 7
CHAPTER 2 LITERATURE REVIEW 9
2.1 Introduction to UGBB Procedure 9
2.2 Existing UGBB Robotic Systems 11
2.3 Hybrid Force/Position Control in Robotic Systems 18
2.4 Hybrid Force/Position Control Law 25
2.4.1 Position Control Law 25
2.4.2 Force/Position Control Law 26
2.5 Summary 29
PTTA
PERPUS
TAKAAN
TUNKU
CHAPTER 3 RESEARCH APPROACH 30
3.1 Research Methodology 31
3.2 Feasibility Studies 33
3.3 Design of UGBB Robotic System 39
3.4 Hardware System 42
3.4.1 5-DOF Industrial Robot 42
3.4.2 Ultrasound Machine 43
3.4.3 6-Axis F/T Sensor 45
3.4.4 F/T Controller 46
3.5 Software System 47
3.5.1 Robot Controller Communication to Host PC 47 3.5.2 F/T Controller Communication to Host PC 50
3.6 Summary 51
CHAPTER 4 UGBB ROBOTIC SYSTEM MODELLING AND
SIMULATION 53
4.1 Modelling of RV-2AJ Robot 54
4.1.1 CAD Modelling 54
4.1.2 SimMechanics Modelling 56
4.2 Robot Kinematics Analysis 59
4.2.1 Forward Kinematics Study 60
4.2.2 Inverse Kinematics Study 68
4.3 Simulation of RV-2AJ in SimMechanics 80
4.4 Summary 82
CHAPTER 5 CONTACT FORCE MODELLING 83
5.1 Nonlinear ARX Soft Tissue Modelling by Wavenet
and Sigmoid Estimators 84
5.1.1 Experimental Setup 85
5.1.2 Simulation Results and Analysis 91
5.1.3 Development of Motion Disturbance 98
5.2 Summary 101
PTTA
PERPUS
TAKAAN
TUNKU
CHAPTER 6 DEVELOPMENT OF FORCE/POSITION
CONTROL SYSTEM 103
6.1 UGBB Control System 103
6.2 PID Force Controller 105
6.2.1 Proportional Force Controller 106
6.2.2 PI Force Controller 107
6.3 Development of Intelligent Force Controller 108
6.3.1 PI-Fuzzy Force Controller 109
6.3.2 Fuzzy-PID Force Controller 112
6.4 Force Controller Performance Evaluation 116 6.5 Comparison of Force and Position Responses on
Different Environment Condition 121
6.5.1 Position Control System without Force Controller 121 6.5.2 Force and Position Control System without
Disturbance 123
6.5.3 Force and Position Control System with
Respiration Disturbance 124
6.5.4 Force and Position Control System with Extreme
Disturbance 126
6.6 Variations of Respiration Disturbance 127 6.7 Variations of Desired Contact Force 131
6.8 Summary 136
CHAPTER 7 CONCLUSION AND RECOMMENDATIONS FOR
FUTURE WORK 137
7.1 Conclusion 137
7.2 Recommendations for Future Work 138
REFERENCES 140
PTTA
PERPUS
TAKAAN
TUNKU
LIST OF TABLES
2.1 Summary of existing UGBB robotic system 18
2.2 Comparative study of existing hybrid force/position control
in robotic systems 24
2.3 Summary of position control law in existing robotic system 26 2.4 Summary of force/position control law in existing robotic
system 28
3.1 Ultrasound images of targeted lump movement at different
contact force 37
4.1 RV-2AJ robot arm parameters 60
4.2 Comparison between simulation and experiment results for
home position 64
4.3 Comparison between simulation and experiment results for
second position 65
4.4 Comparison between simulation and experiment results for
third position 66
4.5 Comparison between simulation and experiment results for
fourth position 67
4.6 Comparison between simulation and experiment results for
fifth position 68
4.7 Comparison between simulation and experimental results for
determining θ1 74
4.8 Comparison between simulation and experimental results for
first configuration 75
4.9 Comparison between simulation and experimental results for
second configuration 77
4.10 Comparison between simulation and experimental results for
third configuration 79
PTTA
PERPUS
TAKAAN
TUNKU
4.11 Results comparison between geometrical approach and
inverse matrix multiplication method 80
4.12 Comparison between experiment and simulation results for
both forward and inverse kinematics of RV-2AJ 81 5.1 Model fit and correlation test summary for nonlinear models
using wavenet and sigmoid estimators 91
5.2 Measured and simulation output force at fixed input distance for (a) generic tissue phantom model and (b) breast phantom
model 96
6.1 PI-Fuzzy force controller membership functions 110 6.2 Time-domain characteristic for different types of force
controller for a step input of 1N 118
6.3 Time-domain characteristic for different types of force
controller for a step input of 7N 119
6.4 Performance index values for different types of force
controller 120
PTTA
PERPUS
TAKAAN
TUNKU
LIST OF FIGURES
1.1 Ultrasound-guided core needle biopsy (Mayo Clinic, 2014) 3 2.1 Patient undergoing UGBB procedure involving (a) one
radiologist handling multiple devices and (b) two radiologists
performing each tasks individually 10
2.2 The steerable needle device: (a) External device view; (b) Stylet extension drive train; and (c) Stylet rotation drive train
(Okazawa et al., 2005) 11
2.3 (a) Schematic diagram and (b) Real hardware of the
experimental setup (Liang et al., 2010) 12
2.4 Experiment of robotic system for lump manipulation and
UGBB (V. Mallapragada et al., 2008b) 13
2.5 Ultrasound-guided breast intervention system: (a) Overall mechanism; and (b) Needle guidance system (Mallapragada
et al., 2011) 14
2.6 Needle insertion manipulator (Kobayashi et al., 2009) 15 2.7 (a) Overview of in vitro experiment and (b) Manipulator for
in vivo experiments (Hatano et al., 2011) 16 2.8 Breast test object and biopsy system attached on the robot
arm (Nelson et al., 2010) 17
2.9 Block diagram of the external hybrid force/position control
during the guiding task (Rabenorosoa et al., 2010) 19 2.10 Structure of hybrid force/position controller (Jiang et al.,
2010) 20
2.11 Block diagram of the hybrid force/position controller (Cho et
al., 2013) 20
2.12 Skincare robot (Tsumaki et al., 2008) 21
2.13 Ultrasound diagnosis robot (Masuda et al., 2011) 22
PTTA
PERPUS
TAKAAN
TUNKU
2.14 Experimental scenario (Perez-del-Pulgar et al., 2013) 23 2.15 Device compensates for up to 5cm between the radiologist
and patient (Gilbertson & Anthony, 2015) 23
3.1 Flowchart of research activities 32
3.2 Steps involved in locating suspected lump in a breast using
ultrasound transducer 33
3.3 Proposed procedures for UGBB robotic system 34 3.4 Experimental setup to obtain lump movement 35 3.5 Targeted lump movement on different contact forces 39 3.6 Overall configuration of UGBB robotic system 40
3.7 Experimental setup of UGBB robotic system 41
3.8 Control architecture of the proposed UGBB robotic system 42 3.9 5-DOF Mitsubishi RV-2AJ industrial robot (Mitsubishi
Electric, 2008) 43
3.10 Toshiba Nemio SSA-550A ultrasound machine (BIMEDIS,
2010a) 44
3.11 Toshiba PLM-805AT ultrasound transducer (BIMEDIS,
2010b) 44
3.12 Mini40 6-axis F/T sensor (ATI Industrial Automation, 2013) 45 3.13 F/T controller (ATI Industrial Automation, 2012) 46 3.14 F/T controller connections (ATI Industrial Automation, 2012) 46
3.15 Software configuration diagram 48
3.16 Communication protocol window 49
3.17 Communication server window: (a) Successful connection
and (b) Connection error 49
3.18 Program operational interface 50
3.19 F/T function software 51
4.1 Overview of position control law for UGBB robotic system 54 4.2 3D modelling of Mitsubishi RV-2AJ robotic arms 55
4.3 CAD translation method 56
4.4 SimMechanics model of RV-2AJ in (a) Simulink
environment and (b) simulation model 57
4.5 Joint actuator input control 58
4.6 Inverse and forward kinematics for RV-2AJ robot controller 58
PTTA
PERPUS
TAKAAN
TUNKU
4.7 RV-2AJ robot arm joints 59
4.8 Frame assignment of RV-2AJ robot 60
4.9 RV-2AJ robot at home position in (a) simulation and (b)
experiment 63
4.10 RV-2AJ robot at second position in (a) simulation and (b)
experiment 64
4.11 RV-2AJ robot at third position in (a) simulation and (b)
experiment 65
4.12 RV-2AJ robot at fourth position in (a) simulation and (b)
experiment 66
4.13 RV-2AJ robot at fifth position in (a) simulation and (b)
experiment 67
4.14 Waist joint angle, θ1 69
4.15 RV-2AJ robot with wrist pitch at vertical position 70 4.16 Shoulder joint angle, θ2 to wrist joint angle, θ4 71
4.17 RV-2AJ robot at first configuration 75
4.18 RV-2AJ robot at second configuration 77
4.19 RV-2AJ robot at third configuration 78
4.20 Comparison of RV-2AJ robot at several random positions in
experiment and simulation 81
5.1 Black-box modelling approach on soft tissue phantom 85
5.2 General steps in system identification 86
5.3 Schematic diagram for breast phantom data acquisition 87 5.4 Data acquisition setup for (a) generic tissue phantom and (b)
breast phantom 89
5.5 Input signals (robot travel towards phantom) and output signals (acting force towards robot) for (a) generic tissue
phantom and (b) breast phantom 90
5.6 Simulation and actual response of system output for (a)
generic tissue phantom and (b) breast phantom 93 5.7 Autocorrelation and cross correlation analysis for [2 2 0]
nonlinear ARX sigmoid estimator for (a) generic tissue
phantom and (b) breast phantom 94
PTTA
PERPUS
TAKAAN
TUNKU
5.8 Measured vs simulation of final mean value for (a) generic
tissue phantom and (b) breast phantom 95
5.9 Respiration disturbance in UGBB robotic system 98 5.10 Effect of breast motion during respiration to UGBB robotic
system 99
5.11 Force and position response of respiration disturbance from
breast’s CTV movement 100
5.12 Force and position response for respiration disturbance from
breast movement 101
6.1 Schematic diagram for UGBB robotic system 104 6.2 Contact operation on breast biopsy procedure 105 6.3 Force response for proportional force controller 106 6.4 Force response for PI force controller (a) without disturbance
and (b) with respiration disturbance 108
6.5 Schematic diagram of PI-Fuzzy force controller 109 6.6 Control surface of PI-Fuzzy force controller 110 6.7 Force response for PI-Fuzzy force controller (a) without
disturbance and (b) with disturbance 112
6.8 Schematic diagram of F-PID force controller 113 6.9 Control surface of F-PID force controller 114 6.10 Force response for F-PID force controller (a) without
respiration and (b) with respiration disturbance 115 6.11 Unit step response of control system (Ogata, 2009) 117 6.12 Step response of (a) PI force controller and (b) F-PID force
controller for a step input of 1N 118
6.13 Step response of (a) PI force controller and (b) F-PID force
controller for a step input of 7N 119
6.14 (a) Force and (b) position response of position control system
without force controller 122
6.15 (a) Force and (b) position response of force and position
control system without disturbance 124
6.16 (a) Force and (b) position response of force and position
control system with respiration disturbance 125
PTTA
PERPUS
TAKAAN
TUNKU
6.17 (a) Force and (b) position response of force and position
control system with extreme disturbance 126
6.18 (a) Force and (b) position response with double amplitude of
respiration disturbance 128
6.19 (a) Force and (b) position response with double frequency of
respiration disturbance 129
6.20 (a) Force and (b) position response with double amplitude
and double frequency of respiration disturbance 130 6.21 (a) Force and (b) position response for Fd = 1N 132
6.22 (a) Force and (b) position response for Fd = 3N 133
6.23 (a) Force and (b) position response for Fd = 5N 134
6.24 (a) Force and (b) position response for Fd = 7N 135
PTTA
PERPUS
TAKAAN
TUNKU
LIST OF SYMBOLS AND ABBREVIATIONS ° - Degree 𝜃 - Theta % - Percentage 2D - Two-Dimensional 3D - Three-Dimensional
ACF - Autocorrelation Function ARX - Auto Regression Exogenous ASR - Age-Standardized Rate
CAD - Computer-Aided Design
CCF - Cross Correlation Function CTV - Clinical Target Volume
D-H - Denavit-Hartenberg
DC - Direct Current
DCBF - Digital Continuous Beam Former
DLL - Dynamic-Link Library
DMS - Dead Man’s Switch
DOF - Degree of Freedom
F-PID - Fuzzy PID
FL - Fuzzy Logic
F/T - Force/Torque
FES - Functional Electrical Stimulation
PTTA
PERPUS
TAKAAN
TUNKU
FIS - Fuzzy Inference System
FNAC - Fine Needle Aspiration Cytology
FOV - Field of View
g - Gram
GUI - Graphical User Interface
Hz - Hertz
IAE - Integral of Absolute Error
IARC - International Agency for Research on Cancer ILC - Iterative Learning Control
ITAE - Integral of Time Absolute Error
kg - Kilogram
LAD - Left Anterior Descending
LED - Light-Emitting Diode
mm - Millimeter
MRC - Modified Rate Control
ms - Milliseconds
N - Newton
N-mm - Newton-millimeter
NARX - Nonlinear ARX
NCR - National Cancer Registry NNARX - Neural Network with ARX
PC - Personal Computer
PFC - Predictive Functional Control PI - Proportional Integral
PID - Proportional, Integral and Derivative
PM - Pneumatic Muscles
PTTA
PERPUS
TAKAAN
TUNKU
RLS - Recursive Least Square RSS - Robot Simulation Software
s - Seconds
SD - Standard Deviation
UGBB - Ultrasound-Guided Breast Biopsy
PTTA
PERPUS
TAKAAN
TUNKU
LIST OF APPENDICES
APPENDIX TITLE PAGE
A Mitsubishi RV-2AJ Robot 151
B1 ATI Mini40 F/T Sensor 154
B2 Detailed Certificate of Calibration for ATI Mini40 F/T Sensor
158
C1 Arm Parameters of Forward Kinematics 162
C2 Transformation Matrices of Forward Kinematics 164 D Simplified Schematic Diagram for UGBB Robotic
System in MATLAB
165
PTTA
PERPUS
TAKAAN
TUNKU
CHAPTER 1
INTRODUCTION
The International Agency for Research on Cancer (IARC) reported in 2012 that breast cancer is the second most common cancer in the world and the most frequent cancer among women (Ferlay et al., 2015). It was estimated that 1.67 millions new breast cancer cases were diagnosed and was ranked as the fifth cause of death (522,000 deaths) from overall cancers. In Malaysia, the IARC estimated an Age-Standardized Rate (ASR) of breast cancer as 38.7 per 100,000 with 5410 new cases in 2012.
According to the 5-year Malaysian National Cancer Registry (NCR) report for new cancers diagnosed from 2007 to 2011, breast cancer in Malaysia accounted to the most common cancer for all residents by 17.7% and the most frequent cancer among women by 32.1% (Ministry of Health, 2016). Overall, Malaysian women have poor survival from breast cancer due to poor understanding of the risk factors, symptoms and methods for early detection of breast cancer (Yip et al., 2014). Otherwise, it is approximated that half of the deaths due to breast cancer could be prevented, considering that survival rates essentially depend on the timely discovery of the disease, which is at the early stage of the unregulated cell growth.
As stated by Bruening et al. (2009), women diagnosed with initial phases of the breast cancer have a 5-year survival rate of making a full recovery. The standard diagnostic procedure is denoted as triple-assessment, which basically comprises of three medical inspections to attain great assurance in the diagnosis. They are palpation (self-examination or by a specialist), breast imaging (a combination of mammography and ultrasound) followed by fine needle biopsy if necessary.
PTTA
PERPUS
TAKAAN
TUNKU
Two notable approaches for breast biopsy include needle biopsy and open excisional biopsy (Mayo Clinic, 2014). Image-guided needle biopsy is more appealing because it is less traumatic, produces little or no scar (Fine & Staren, 2006; Killebrew & Oneson, 2006; Koskela et al., 2006), allows quicker recovery, and substantially low cost than open surgical biopsy (Zuiani et al., 2005). The procedure is an invasive assessment that incorporates in acquiring the sample cells from the suspicious lump. The obtained cells are then examined under a microscope by a pathologist responsible for the diagnosis to confirm the presence of cancer cells. Since the biopsy work requires comprehensive knowledge and technical proficiency, computer-aided diagnosis can assist radiologist and help in getting the results.
Initial clinical experiment has shown that medical robot has greater precision, faster execution and less risks of infection compared to handheld approaches in conducting breast biopsy (Rovetta, 2000). Some other possible advantages include less risk, pain, recovery time, cost-effective, reduce radiologist’s fatigue and fewer needle placements to correctly sample the lump (V. Mallapragada et al., 2011; Nelson et al., 2010). Thus, an ideal case of medical assist equipment is to use robotic instruments with the knowledge and experience of the radiologist to pilot the robot. Clinical matters to be tackled involve positioning feedback to the operator via force feedback and image verification or a combination of sensor systems for sampling device insertion (Nelson et al., 2012). Nonetheless, concerns regarding large learning curves, lesser radiologist tactile feedback and reasonably high implementation cost will need to be confronted before widespread clinical approval is possible (Gerhardus, 2003).
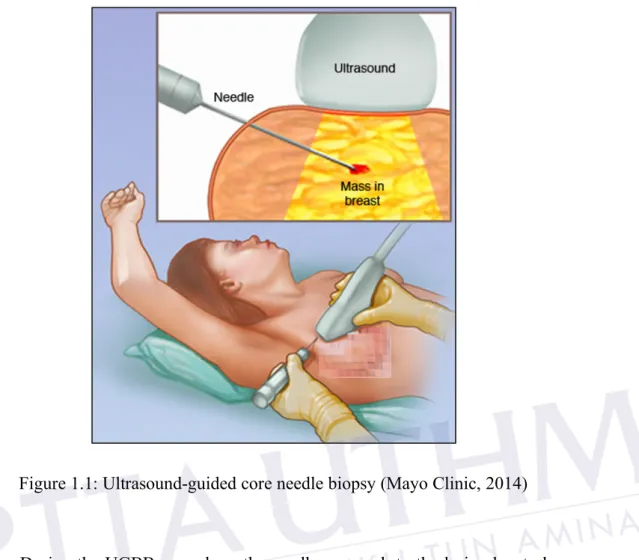
Small incision during Fine Needle Aspiration Cytology (FNAC) of the breast is a minimally invasive procedure that resulted in a very limited Field of View (FOV) to the naked eyes of the radiologist. Hence, one of the most crucial instruments is an image guidance device such as an ultrasound transducer that can provide analytical information as to the nature of a breast lesion and the positional tip of the biopsy needle. At present, the radiologist has to hold both transducer and biopsy needle simultaneously as shown in Figure 1.1 to effectively conduct the Ultrasound-Guided Breast Biopsy (UGBB) procedure. However, even though handheld approaches can provide accurate sampling of breast lesions, accuracy differs from one radiologist to another (Salem et al., 2009). Besides, a precise localization gradually becomes further challenging for deeply located and smaller sized breast lesions even with exceptional training and high level of experience (Nelson et al., 2012).
PTTA
PERPUS
TAKAAN
TUNKU
Figure 1.1: Ultrasound-guided core needle biopsy (Mayo Clinic, 2014)
During the UGBB procedure, the needle approach to the lesion has to be as parallel to the chest wall as possible in order to avoid the worst case scenario of a pneumothorax complication (collapsed lung) where it can be a serious life-threatening event (Apesteguía & Pina, 2011). Likewise, the orientation of the ultrasound transducer should be parallel to the needle as well to easily visualize the needle. Formerly, an Italian study of more than 200 000 breast biopsy procedures described that pneumothorax life-threatening complication occurred in 1 in 10 000 cases (0.01%) (Catania et al., 1993). However, the authors admitted that this figure might be underrated due to unrecognized and asymptomatic cases of pneumothoraxes.
Similar incident was first reported in 2005 to a woman having a mild form of Poland’s syndrome (absence of chest muscle) (Salhab et al., 2005). Patients with deeply located central lesions and patients with thin bodies and small sized breasts are also at greater risk for developing this complication. As such, the handling of multiple devices simultaneously is believed to be one of the contributing factors that deteriorated radiologist skills in performing the biopsy procedure, thus leading to the pneumothorax complication.
PTTA
PERPUS
TAKAAN
TUNKU
Additionally, inconsistent contact forces from the ultrasound transducer to the breast can lead to repeatability problem for similar acquisition state and images of the same tissue region (Gilbertson & Anthony, 2015). The uncontrollable forces along with hand tremors from the radiologist encourage the suspected lump to move away from its original position. Even though the radiologist continuously tries to maintain constant forces, the slippery condition of the ultrasound gel makes it possible for the transducer to lose contact with the breast subsequently making the lump disappear from the ultrasound-imaging FOV. Furthermore, due to the dynamic structures of the breast tissue, large deformations occurred inside the breast whenever the biopsy needle is inserted (DiMaio & Salcudean, 2002; V. Mallapragada et al., 2008a). Ultimately, multiple insertions at the same biopsy region might be necessary to successfully sample the target which in return further compromising the integrity of the breast tissue.
Therefore, a robust hybrid force/position control of a UGBB robotic system for manoeuvring the ultrasound transducer is proposed in order to maintain low, safe and consistent contact force on the breast. By implementing this method, expected advantages include enabling full control on needle handling and higher concentration to the radiologist during lump sampling. Furthermore, other anticipated benefits include compensation for external disturbances to the UGBB robotic system, which offers the ability to indirectly track the position of the suspected lump and reducing the number of unnecessary needle insertion.
1.1 Problem Statement
Current researches and developments of UGBB robotic system are more focused on the enhancement of needle position and insertion, but rather neglect to address force and position control of the ultrasound transducer itself as a significant element (Hatano et al., 2011; Kobayashi et al., 2012; Liang et al., 2010; V. Mallapragada et al., 2011; Nelson et al., 2012; Okazawa et al., 2005). Radiologist has to handle multiple devices at once which could reduce the abilities in performing such procedure resulting in radiologist’s fatigue, compromising the structural integrity of the breast tissue due to multiple insertions and susceptibilities to pneumothorax complication for the patient.
PTTA
PERPUS
TAKAAN
TUNKU
REFERENCES
Apesteguía, L., & Pina, L. J. (2011). Ultrasound-guided core-needle biopsy of breast lesions. Insights into Imaging, 2(4), 493–500. http://doi.org/10.1007/s13244-011-0090-7
Atashzar, S. F., Khalaji, I., Shahbazi, M., Talasaz, A., Patel, R. V., & Naish, M. D. (2013). Robot-assisted lung motion compensation during needle insertion. 2013 IEEE International Conference on Robotics and Automation, 1682–1687. http://doi.org/10.1109/ICRA.2013.6630796
ATI Industrial Automation. (2012). Six-Axis Force/Torque Sensor System.
ATI Industrial Automation. (2013). F/T System Interfaces. Retrieved from http://www.ati-ia.com/products/ft/ft_SystemInterfaces.aspx
Batra, S., Teo, K., Vennarini, S., Lin, L. L., & Freedman, G. M. (2013). An Analysis of 3-Dimensional Breast Motion During Normal Respiration: What CTV to PTV Margin Is Needed? International Journal of Radiation Oncology*Biology*Physics, 87(2), S197. http://doi.org/10.1016/j.ijrobp.2013.06.509
BIMEDIS. (2010a). Toshiba Nemio SSA-550A. Retrieved July 13, 2013, from https://bimedis.com/a-item/ultrasound-machines-toshiba-nemio-10-ssa-550a-10-696421 BIMEDIS. (2010b). Toshiba PLM-805AT. Retrieved July 13, 2013, from
https://bimedis.com/a-item/linear-probes-toshiba-plm-805at-732593/732593/linear-probes-toshiba-plm-805at
Bruening, W., Schoelles, K., Treadwell, J., Launders, J., Fontanarosa, J., & Tipton, K. (2009). Comparative Effectiveness of Core-Needle and Open Surgical Biopsy for the Diagnosis of Breast Lesions. Retrieved from www.effectivehealthcare.ahrq.gov/reports/final.cfm Buitrago, J. a., Giraldo, F. D., & Lamprea, J. a. (2011). Remote access lab for
Mitsubishi RV-2AJ robot. In IX Latin American Robotics Symposium and IEEE Colombian Conference on Automatic Control, 2011 IEEE (pp. 1–7). IEEE. http://doi.org/10.1109/LARC.2011.6086802
PTTA
PERPUS
TAKAAN
TUNKU
CAE Healthcare. (2015). Breast Biopsy Ultrasound Training Model. Retrieved from http://www.bluephantom.com/product/Breast-Biopsy-Ultrasound-Training-Model.aspx?cid=529 Catania, S., Veronesi, P., Marassi, A., Pluchinotta, A., Bono, A., Zurrida, S., … Costa, A. (1993). Risk of pneumothorax after fine needle aspiration of the breast: Italian experience of more than 200 000 aspirations. The Breast, 2(4), 246–247. http://doi.org/10.1016/0960-9776(93)90008-4
Checka, C. M., Chun, J. E., Schnabel, F. R., Lee, J., & Toth, H. (2012). The Relationship of Mammographic Density and Age: Implications for Breast Cancer Screening. American Journal of Roentgenology, 198(3), W292–W295. http://doi.org/10.2214/AJR.10.6049
Chen, C.-M., Chou, Y.-H., Han, K.-C., Hung, G.-S., Tiu, C.-M., Chiou, H.-J., & Chiou, S.-Y. (2003). Breast Lesions on Sonograms: Computer-aided Diagnosis with Nearly Setting-Independent Features and Artificial Neural Networks. Radiology, 226(2), 504–514. http://doi.org/10.1148/radiol.2262011843
Chen, C.-S. (2008). Dynamic Structure Neural-Fuzzy Networks for Robust Adaptive Control of Robot Manipulators. IEEE Transactions on Industrial Electronics, 55(9), 3402–3414. http://doi.org/10.1109/TIE.2008.926778
Cho, H.-C., Min, J.-K., & Song, J.-B. (2013). Hybrid position and force control of a robot arm equipped with joint torque sensors. In 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) (Vol. 2, pp. 577–579). IEEE. http://doi.org/10.1109/URAI.2013.6677423
Chopra, S., Dinshaw, K. A., Kamble, R., & Sarin, R. (2006). Breast movement during normal and deep breathing, respiratory training and set up errors: implications for external beam partial breast irradiation. The British Journal of Radiology, 79(945), 766–773. http://doi.org/10.1259/bjr/98024704
Coman, M., Balan, R., Donca, R., & Verdeş, D. (2011). Optimization of the Control for the RV-2AJ Serial Robot. Romanian Review Precision Mechanics, Optics and Mechatronics, (39), 149–152.
Coman, M., Stan, S., Manic, M., & Balan, R. (2009). Design, simulation and control in virtual reality of a RV-2AJ robot. In 2009 35th Annual Conference of IEEE Industrial Electronics (pp. 2026–2031). IEEE. http://doi.org/10.1109/IECON.2009.5414922 Cosio, F. A., Hevia, N., Lira, E., Garcia, C., Quispe, R. M., Reyes, B., & Lasri, E. H. (2011).
Mammographic image analysis and computer assisted biopsy of breast tumors. In 2011 4th International Conference on Biomedical Engineering and Informatics (BMEI)
PTTA
PERPUS
TAKAAN
TUNKU
(Vol. 1, pp. 360–364). IEEE. http://doi.org/10.1109/BMEI.2011.6098250
Craig, J. J. (2005). Introduction To Robotics: Mechanics and Control (Third). Pearson Prentice Hall. Retrieved from http://books.google.com/books/about/Introduction_to_robotics.html?id=40JSAAAAMAAJ Crainic, M.-F., & Preitl, S. (2014). Virtual laboratory for a remotely operating robot arm. In 2014
IEEE 9th IEEE International Symposium on Applied Computational Intelligence and Informatics (SACI) (pp. 101–104). IEEE. http://doi.org/10.1109/SACI.2014.6840043 Crainic, M.-F., Preitl, S., Sandru, L. A., & Dolga, V. (2014). Secure handwriting using
a robot arm for educational purpose. In 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR) (pp. 58–63). IEEE. http://doi.org/10.1109/MMAR.2014.6957325
Davies, B. (1993). Safety of medical robots. Safety-Critical Systems: Current Issues, Techniques and Standards, 193–201.
De Schutter, J., & Van Brussel, H. (1988). Compliant Robot Motion II. A Control Approach Based on External Control Loops. The International Journal of Robotics Research, 7(4), 18–33. http://doi.org/10.1177/027836498800700402 DiMaio, S. P., & Salcudean, S. E. (2002). Needle insertion modelling and simulation.
In Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292) (Vol. 2, pp. 2098–2105). IEEE. http://doi.org/10.1109/ROBOT.2002.1014850
Dombre, E., Duchemin, G., Poignet, P., & Pierrot, F. (2003). Dermarob: a safe robot for reconstructive surgery. IEEE Transactions on Robotics and Automation, 19(5), 876–884. http://doi.org/10.1109/TRA.2003.817067
Duchemin, G., Maillet, P., Poignet, P., Dombre, E., & Pierrot, F. (2005). A hybrid position/force control approach for identification of deformation models of skin and underlying tissues. IEEE Transactions on Biomedical Engineering, 52(2), 160–170. http://doi.org/10.1109/TBME.2004.840505
Emerson. (2016). PID tuning. Retrieved December 15, 2016, from https://www.automationworld.com/lean-manufacturing/pid-tuning
Epiphan. (2017). Frame Grabber. Retrieved March 17, 2017, from https://www.epiphan.com/frame-grabber/
Esa, M. F. M., Ibrahim, H., Mustaffa, N. H., & Majid, H. A. (2011). The Mitsubishi MelfaRxm middleware and application: A case study of RV-2AJ robot. In 2011 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology (STUDENT) (pp. 138–143). IEEE. http://doi.org/10.1109/STUDENT.2011.6089341
PTTA
PERPUS
TAKAAN
TUNKU
Farah, E. (2017). Fuzzy PID based path tracking control of a 5-DOF needle-holding robot. In 2017 International Conference on Communication, Control, Computing and Electronics Engineering (ICCCCEE) (pp. 1–5). IEEE. http://doi.org/10.1109/ICCCCEE.2017.7867664 Ferlay, J., Soerjomataram, I., Dikshit, R., Eser, S., Mathers, C., Rebelo, M., … Bray, F. (2015). Cancer incidence and mortality worldwide: sources, methods and major patterns in GLOBOCAN 2012. International Journal of Cancer, 136(5), E359-86. http://doi.org/10.1002/ijc.29210
Fine, R. E., & Staren, E. D. (2006). Percutaneous radiofrequency-assisted excision of fibroadenomas. American Journal of Surgery, 192(4), 545–547.
Fuyin, D., & Weifeng, D. (2009). Design of a three-input fuzzy logic controller and the method of its rules reduction. In Proceedings of the 2009 International Symposium on Information Processing (ISIP’09) (Vol. 2, pp. 51–53). Huangshan, China.
Galvan-Duque, C., Zavala-Yoe, R., Rodriguez-Reyes, G., Mendoza-Cruz, F., & Ramirez, R. (2013). Classical and Intelligent ARX Models for Classification of Gait Events. In 2013 International Conference on Mechatronics, Electronics and Automotive Engineering (pp. 78–83). IEEE. http://doi.org/10.1109/ICMEAE.2013.16
Gerhardus, D. (2003). Robot-assisted surgery: the future is here. Journal of Healthcare Management / American College of Healthcare Executives, 48(4), 242–51. Retrieved from http://www.ncbi.nlm.nih.gov/pubmed/12908224
Gilbertson, M. W., & Anthony, B. W. (2015). Force and Position Control System for Freehand Ultrasound. IEEE Transactions on Robotics, 31(4), 835–849. http://doi.org/10.1109/TRO.2015.2429051
Guo, S., Chen, Q., Xiao, N., & Wang, Y. (2016). A fuzzy PID control algorithm for the interventional surgical robot with guide wire feedback force. In 2016 IEEE International Conference on Mechatronics and Automation (pp. 426–430). IEEE. http://doi.org/10.1109/ICMA.2016.7558601
Haklidir, M., & Tasdelen, I. (2009). Modeling, simulation and fuzzy control of an anthropomorphic robot arm by using Dymola. Journal of Intelligent Manufacturing, 20(2), 177–186. http://doi.org/10.1007/s10845-008-0227-9 Hatano, M., Kobayashi, Y., Hamano, R., Suzuki, M., Shiraishi, Y., Yambe, T., … Fujie, M. G.
(2011). In vitro and in vivo validation of robotic palpation-based needle insertion method for breast tumor treatment. In 2011 IEEE International Conference on Robotics and Automation (pp. 392–397). IEEE. http://doi.org/10.1109/ICRA.2011.5979896
PTTA
PERPUS
TAKAAN
TUNKU
Ilewicz, G. (2016). Modeling and Controlling Medical Robot for Soft Tissue Surgery and Servicing the Artificial Organs. In 17th International Conference on Mechatronics - Mechatronika (ME) (pp. 1–5).
Ismail, N., Tajjudin, N., Rahiman, M. H. F., & Taib, M. N. (2009). Estimation of nonlinear ARX model for steam distillation process by wavenet estimator. In 2009 IEEE Student Conference on Research and Development (SCOReD) (pp. 562–565). IEEE. http://doi.org/10.1109/SCORED.2009.5442934
Jambak, M. I., Haron, H., & Nasien, D. (2008). Development of Robot Simulation Software for Five Joints Mitsubishi RV-2AJ Robot Using MATLAB/Simulink and V-Realm Builder. In 2008 Fifth International Conference on Computer Graphics, Imaging and Visualisation (pp. 83–87). IEEE. http://doi.org/10.1109/CGIV.2008.71 Jiang, X., Xiong, C., Sun, R., & Xiong, Y. (2010). Fuzzy Hybrid Force-Position Control for the Robotic Arm of an Upper Limb Rehabilitation Robot Powered by Pneumatic Muscles. In 2010 International Conference on E-Product E-Service and E-Entertainment (pp. 1–4). IEEE. http://doi.org/10.1109/ICEEE.2010.5661226 Kandel, A., & Langholz, G. (1993). Fuzzy Control Systems (1st ed.). CRC Press. Khalifa, A., Ramadan, A., Ibrahim, K., Fanni, M., Assal, S., & Abo-Ismail, A. (2014).
Workspace mapping and control of a teleoperated endoscopic surgical robot. In 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR) (pp. 675–680). IEEE. http://doi.org/10.1109/MMAR.2014.6957435 Khan, A. A., & Rapal, N. (2006). Fuzzy PID Controller: Design, Tuning and
Comparison with Conventional PID Controller. In 2006 IEEE International Conference on Engineering of Intelligent Systems (pp. 1–6). IEEE. http://doi.org/10.1109/ICEIS.2006.1703213
Killebrew, L. K., & Oneson, R. H. (2006). Comparison of the diagnostic accuracy of a assisted percutaneous intact specimen sampling device to a vacuum-assisted core needle sampling device for breast biopsy: Initial experience. Breast Journal, 12(4), 302–308.
Kim, H. M., Hong, T. K., & Kim, G. S. (2014). Design of a wrist rotation rehabilitation robot. The 4th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent, 240–245. http://doi.org/10.1109/CYBER.2014.6917468 Kobayashi, Y., Suzuki, M., Kato, A., Hatano, M., Konishi, K., Hashizume, M., &
Fujie, M. G. (2012). Enhanced Targeting in Breast Tissue Using a Robotic Tissue Preloading-Based Needle Insertion System. IEEE Transactions on Robotics,
PTTA
PERPUS
TAKAAN
TUNKU
28(3), 710–722. http://doi.org/10.1109/TRO.2012.2183055
Kobayashi, Y., Suzuki, M., Kato, A., Konishi, K., Hashizume, M., & Fujie, M. G. (2009). A robotic palpation-based needle insertion method for diagnostic biopsy and treatment of breast cancer. In 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 5534–5539). IEEE. http://doi.org/10.1109/IROS.2009.5354485
Koskela, A., Berg, M., Sudah, M., Malinen, A., Kärjä, V., Mustonen, P., … Vanninen, R. (2006). Learning curve for add-on stereotactic core needle breast biopsy. Acta Radiologica, 47(5), 454–460.
Lehmann, T., Rossa, C., Usmani, N., Sloboda, R., & Tavakoli, M. (2015). A virtual sensor for needle deflection estimation during soft-tissue needle insertion. In 2015 IEEE International Conference on Robotics and Automation (ICRA) (pp. 1217–1222). IEEE. http://doi.org/10.1109/ICRA.2015.7139346
Li, Z., Hayashibe, M., Zhang, Q., & Guiraud, D. (2012). FES-induced muscular torque prediction with evoked EMG synthesized by NARX-type recurrent neural network. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2198–2203). IEEE. http://doi.org/10.1109/IROS.2012.6385602 Liang, K., Rogers, A. J., Light, E. D., von Allmen, D., & Smith, S. W. (2010).
Three-Dimensional Ultrasound Guidance of Autonomous Robotic Breast Biopsy: Feasibility Study. Ultrasound in Medicine & Biology, 36(1), 173–177. http://doi.org/10.1016/j.ultrasmedbio.2009.08.014
Ling, T. G., Rahmat, M. F., Husain, a. R., & Ghazali, R. (2011). System identification of electro-hydraulic actuator servo system. In 2011 4th International Conference on Mechatronics (ICOM) (pp. 1–7). IEEE. http://doi.org/10.1109/ICOM.2011.5937172 Ljung, L. (Ed.). (1999). System Identification (2Nd Ed.): Theory for the User. Upper
Saddle River, NJ, USA: Prentice Hall PTR.
Lo, H. S., & Xie, S. Q. (2012). Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Medical Engineering & Physics, 34(3), 261–268. http://doi.org/10.1016/j.medengphy.2011.10.004
Mallapragada, V., Sarkar, N., & Podder, T. K. (2007). A Robotic System for Real-time Tumor Manipulation During Image guided Breast Biopsy. In 2007 IEEE 7th International Symposium on BioInformatics and BioEngineering (pp. 204–210). IEEE. http://doi.org/10.1109/BIBE.2007.4375566
Mallapragada, V., Sarkar, N., & Podder, T. K. (2008a). Autonomous coordination of imaging and tumor manipulation for robot assisted breast biopsy. In 2008 2nd IEEE
PTTA
PERPUS
TAKAAN
TUNKU
RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (pp. 676–681). IEEE. http://doi.org/10.1109/BIOROB.2008.4762815
Mallapragada, V., Sarkar, N., & Podder, T. K. (2008b). Robotic system for tumor manipulation and ultrasound image guidance during breast biopsy. In 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (Vol. 2008, pp. 5589–5592). IEEE. http://doi.org/10.1109/IEMBS.2008.4650481 Mallapragada, V., Sarkar, N., & Podder, T. K. (2009). Robot-Assisted Real-Time
Tumor Manipulation for Breast Biopsy. IEEE Transactions on Robotics, 25(2), 316–324. http://doi.org/10.1109/TRO.2008.2011418
Mallapragada, V., Sarkar, N., & Podder, T. K. (2011). Toward a Robot-Assisted Breast Intervention System. IEEE/ASME Transactions on Mechatronics, 16(6), 1011– 1020. http://doi.org/10.1109/TMECH.2010.2068575
Mamdouh, M., & Ramadan, A. a. (2012). Development of a teleoperation system with a new workspace spanning technique. In 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 1570–1575). IEEE. http://doi.org/10.1109/ROBIO.2012.6491191 Masuda, K., Urayama, Y., Saito, S., & Takachi, Y. (2012). Development of cooperate system with medical robot to alleviate fatigue in echography. In The 4th 2011 Biomedical Engineering International Conference (pp. 161–164). IEEE. http://doi.org/10.1109/BMEiCon.2012.6172042
Masuda, K., Urayama, Y., Saito, S., & Takachi, Y. (2012). Development of cooperate system with medical robot to alleviate fatigue in echography. In The 4th 2011 Biomedical Engineering International Conference (pp. 161–164). IEEE. http://doi.org/10.1109/BMEiCon.2012.6172042
Mathworks. (2017). Using Lookup Table in Simulink to Implement Fuzzy PID Controller. Retrieved February 17, 2017, from http://www.mathworks.com/help/fuzzy/examples/using-lookup-table-in-simulink-to-implement-fuzzy-pid-controller.html
MATLAB. (2013a). Install and Register SimMechanics Link Software. Retrieved January 13, 2015, from http://www.mathworks.com/help/physmod/sm/ug/install-and-register-simmechanics-link-software.html
MATLAB. (2013b). Model-Based Design. Retrieved October 3, 2015, from http://www.mathworks.com/help/simulink/gs/model-based-design.html
MATLAB. (2013c). SimMechanics: Model and simulate multibody mechanical system. Retrieved January 13, 2015, from http://www.mathworks.com/products/simmechanics/ Mayo Clinic. (2014). Breast biopsy - What you can expect. Retrieved February 14, 2014,
PTTA
PERPUS
TAKAAN
TUNKU
from http://www.mayoclinic.org/tests-procedures/breast-biopsy/details/what-you-can-expect/rec-20236113
Miao, Q., Lo, H. S., Xie, S. Q., & Li, H. S. (2017). Iterative learning control method for improving the effectiveness of upper limb rehabilitation. In M2VIP 2016 - Proceedings of 23rd International Conference on Mechatronics and Machine Vision in Practice. http://doi.org/10.1109/M2VIP.2016.7827302
Ministry of Health, M. (2016). MALAYSIAN NATIONAL CANCER REGISTRY REPORT 2007-2011 (Vol. 1).
Mitsubishi Electric. (2002). MELFA Industrial Robots - Specifications Manual. Mitsubishi Electric. (2008). Mitsubishi Industrial Robot.
Mitsubishi Electric. (2009). MELFA Industrial Robots. Consistent Quality - Precise Control.
Nagase, J., Hamada, K., Satoh, T., Saga, N., & Suzumori, K. (2013). Comparison between PFC and PID control system for tendon-driven balloon actuator. In IECON 2013 - 39th Annual Conference of the IEEE Industrial Electronics Society (pp. 3398–3403). IEEE. http://doi.org/10.1109/IECON.2013.6699674
Nelson, T. R., Tran, A., Fakourfar, H., & Nebeker, J. (2012). Positional Calibration of an Ultrasound Image-Guided Robotic Breast Biopsy System. Journal of Ultrasound in Medicine, 31(3), 351–359. http://doi.org/10.7863/jum.2012.31.3.351
Nelson, T. R., Tran, A., Farourfar, H., & Nebeker, J. (2010). Ultrasound image-guided robotic breast biopsy. In 2010 IEEE International Ultrasonics Symposium (pp. 2352–2355). IEEE. http://doi.org/10.1109/ULTSYM.2010.5935964
Niku, S. B. (Saeed B. (2011). Introduction to robotics : analysis, control, applications. Hoboken, NJ: Wiley.
Ogata, K. (2009). Modern Control Engineering (5th ed.). Pearson.
Okazawa, S., Ebrahimi, R., Chuang, J., Salcudean, S. E., & Rohling, R. (2005). Hand-Held Steerable Needle Device. IEEE/ASME Transactions on Mechatronics, 10(3), 285–296. http://doi.org/10.1109/TMECH.2005.848300
Palanthandalam-Madapusi, H. J., Lacy, S., Hoagg, J. B., & Bernstein, D. S. (2005). Subspace-Based Identification for Linear and Nonlinear Systems. American Control Conference, 15.
Park, J. (2006). A Haptic Teleoperation Approach Based on Contact Force Control. The International Journal of Robotics Research, 25(5–6), 575–591. http://doi.org/10.1177/0278364906065385
PTTA
PERPUS
TAKAAN
TUNKU
Perdereau, V., & Drouin, M. (1994). About kinematic local instability and stabilization of hybrid control schemes. In Proc. of ISRAM ’94 (pp. 545–530). Hawaii, USA. Perez-del-Pulgar, C. J., Munoz, V. F., Velasco, J. J., & Gomez, R. (2013). Parallel force-position control scheme with fuzzy gain tuning for single port laparoscopic surgery. In 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013) (pp. 101–106). IEEE. http://doi.org/10.1109/ICCAS.2013.6703871 Physicians, A. C. of E. (2016). Vital Signs. Retrieved March 21, 2016, from
http://www.emergencycareforyou.org/emergency-101/vital-signs/
Pierrot, F., Dombre, E., Dégoulange, E., Urbain, L., Caron, P., Boudet, S., … Mégnien, J.-L. (1999). Hippocrate: a safe robot arm for medical applications with force feedback. Medical Image Analysis, 3(3), 285–300. http://doi.org/10.1016/S1361-8415(99)80025-5
Pierrot, F., Dombre, E., Teot, L., & Degoulange, E. (2000). Robotized reconstructive surgery: ongoing study and first results. Proc. IEEE International Conference on Robotics and Automation, (April), 1615–1620.
Preusche, C., Ortmaier, T., & Hirzinger, G. (2002). Teleoperation concepts in minimal invasive surgery. Control Engineering Practice, 10(11), 1245–1250. http://doi.org/10.1016/S0967-0661(02)00084-9
Providence Imaging Center. (2014). Ultrasound-Guided Breast Biopsy. Retrieved February 14, 2014, from http://www.provimaging.com/services/ultrasound/ultrasound-guided-breast-biopsy/
Pujas, A., Dauchez, P., & Pierrot, F. (1993). Hybrid position/force control: task description and control scheme determination for a real implementation. In Proceedings of 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS ’93) (Vol. 2, pp. 841–846). IEEE. http://doi.org/10.1109/IROS.1993.583189
Rabenorosoa, K., Clevy, C., & Lutz, P. (2010). Hybrid force/position control applied to automated guiding tasks at the microscale. In 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 4366–4371). IEEE. http://doi.org/10.1109/IROS.2010.5649216
RadiologyInfo. (2014). Ultrasound-Guided Breast Biopsy. Retrieved February 14, 2014, from https://www.radiologyinfo.org/en/info.cfm?pg=breastbius
Rovetta, A. (2000). Surgical robotics of breast biopsy for ambulatory applications: reduction of risks of infections. In Medicine Meets Virtual Reality (pp. 292–294). http://doi.org/10.3233/978-1-60750-914-1-292
PTTA
PERPUS
TAKAAN
TUNKU
Sahiner, B., Chan, H.-P., Roubidoux, M. A., Hadjiiski, L. M., Helvie, M. A., Paramagul, C., … Blane, C. (2007). Malignant and Benign Breast Masses on 3D US Volumetric Images: Effect of Computer-aided Diagnosis on Radiologist Accuracy. Radiology, 242(3), 716–724. http://doi.org/10.1148/radiol.2423051464
Salem, C., Sakr, R., Chopier, J., Marsault, C., Uzan, S., & Daraï, E. (2009). Accuracy of stereotactic vacuum-assisted breast biopsy with a 10-gauge hand-held system. The Breast, 18(3), 178–182. http://doi.org/10.1016/j.breast.2009.03.007
Salhab, M., Al Sarakbi, W., Perry, N., & Mokbel, K. (2005). Pneumothorax after a clinical breast fine-needle aspiration of a lump in a patient with Poland’s syndrome. International Seminars in Surgical Oncology, 2(1), 14. http://doi.org/10.1186/1477-7800-2-14
Seborg, D. E., Thomas, F. E., & Duncan A, M. (2003). Process Dynamics and Control. Wiley.
Shakouri G., H., & Radmanesh, H. R. (2009). Identification of a continuous time nonlinear state space model for the external power system dynamic equivalent by neural networks. International Journal of Electrical Power & Energy Systems, 31(7–8), 334–344. http://doi.org/10.1016/j.ijepes.2009.03.016
Shamsuddin, N., & Taib, M. N. (2011). Nonlinear ARX modeling of heart diseases based on heart sounds. In 2011 IEEE 7th International Colloquium on Signal Processing and its Applications (pp. 382–387). IEEE. http://doi.org/10.1109/CSPA.2011.5759907 Šljivo, A. (2013). Simmulation oF a 5-Axis RV-2AJ Robot. In 17th International
Research/Expert Conference, ”Trends in the Development of Machinery and Associated Technology” (pp. 389–392).
Song, G., & Guo, S. (2007). A novel force feedback-based teleoperation system for medical application. International Journal of Innovative Computing, Information and Control, 3(3), 737–750.
Tsumaki, Y., Kon, T., Suginuma, A., Imada, K., Sekiguchi, A., Nenchev, D. N., … Hanada, K. (2008). Development of a skincare robot. In 2008 IEEE International Conference on Robotics and Automation (pp. 2963–2968). IEEE. http://doi.org/10.1109/ROBOT.2008.4543660
Xie, S. Q., & Jamwal, P. K. (2011). An iterative fuzzy controller for pneumatic muscle driven rehabilitation robot. Expert Systems with Applications, 38(7), 8128–8137. http://doi.org/10.1016/j.eswa.2010.12.154
Yip, C. H., Bhoo Pathy, N., & Teo, S. H. (2014). A review of breast cancer research
PTTA
PERPUS
TAKAAN
TUNKU
in malaysia. The Medical Journal of Malaysia, 69 Suppl A(August), 8–22. Retrieved from http://www.ncbi.nlm.nih.gov/pubmed/25417947
Yu, Z., Xiaofeng, H., & Huifang, L. (2015). Experimental research on the adaptive fuzzy control in slave-hand of surgical robot. In 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER) (pp. 2109–2114). IEEE. http://doi.org/10.1109/CYBER.2015.7288274
Yussof, S., Anuar, A., & Fernandez, K. (2005). Algorithm for Robot Writing Using Character Segmentation. In Third International Conference on Information Technology and Applications (ICITA’05) (Vol. 2, pp. 21–24). IEEE. http://doi.org/10.1109/ICITA.2005.58
Zarrouk, Z., Chemori, A., & Poignet, P. (2013). Force feedback control for compensation of physiological motions in beating heart surgery with real-time experiments. In 3rd International Conference on Systems and Control (pp. 956– 961). IEEE. http://doi.org/10.1109/ICoSC.2013.6750972
Zhihong, M. (2004). Robotics (Second). Pearson Prentice Hall.
Zuiani, C., Londero, V., Bestagno, A., Puglisi, F., Di Loreto, C., & Bazzocchi, M. (2005). Proliferative high-risk lesions of the breast: Contribution and limits of US-guided core biopsy. Lesioni Proliferative Della Mammella Ad Alto Rischio: Apporto E Limiti Della Core Biopsy, 110(5–6), 589–602.
PTTA
PERPUS
TAKAAN
TUNKU