Abstract
XIAO, HANPING. A Recovered Finite Volume Method for Diffusion Equations on Unstructured Grids. (Under the direction of Dr. Hong Luo).
A recovered finite volume method (RFV) for diffusion equations is presented
on unstructured grids. The RFV method is designed to provide an accurate and
robust method for computing the fluxes of the diffusion equations by removing the
interface discontinuity of derivatives of the finite volume solution. The recovered
finite volume method is implemented through: 1) In-cell recovery, in which a linear
polynomial solution in each cell is recovered from the underlying cell-average finite
volume solution. 2) Inter-cell recovery, in which the recovered linear polynomial
solution in each cell is then used to recover a continuous linear polynomial solution
on the union of two neighboring interface-sharing cells. The developed method is
analytically proved to lead to a consistent, second order five-point stencil
discretization for the diffusion equations on uniform grids, but it is proved to be
inconsistent on stretched grids. The RFV method is used to compute a variety of
problems with different tensors and non-smooth solutions on different meshes to
assess its accuracy, robustness and versatility. It has been found to be able to
provide the second order solutions on unstructured anisotropic grids and distorted
grids for smooth solutions, along with a first-order estimation for non-smooth
anisotropic problem. The resulting system of linear equations by applying the
recovered finite volume method is then solved using GMRES (generalized minimum
residual) algorithm with a variety of preconditioners. The effectiveness of different
Preconditioners and an accurate and efficient method to compute numerical
A Recovered Finite Volume Method for Diffusion Equations on Unstructured Grids
by Hanping Xiao
A thesis submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the degree of
Master of Science
Aerospace Engineering
Raleigh, North Carolina
2011
APPROVED BY:
_______________________________ ______________________________
Dr. Jack R. Edwards Dr. Hassan A. Hassan
________________________________
Biography
Hanping Xiao was born in Shanxi Province, China on November 06, 1986. After
graduating from TaiYuan No. 5 Middle School in 2005, Hanping earned a Bachelor of
Science in Thermal and Power Energy Engineering from Harbin Institute of
Technology, China, in 2009. From there he went to North Carolina State University,
where he is going to complete his Master of Science degree in Mechanical and
Acknowledgments
I would like to thank my advisor, Dr. Hong Luo, for his guidance and support
throughout my masters, and his considerable patience and assistance in the
completion of the current thesis work. Through him I was able to gain a great deal of
knowledge concerning CFD and advice for the future. The comments, suggestions,
and corrections from my committee members, Dr. Hassan, and Dr. Edwards are
greatly appreciated. I would also like to thank them for serving on my committee.
I also want to thank my parents and my family, who have been there for me every
step of the way through my growth, especially for the most difficult time since I
Table of Contents
List of Figures ... v
List of Tables ... viii
1 Background Introduction ... 1
2 Problem Definition ... 6
3 Numerical Method ... 7
3.1 Common Approaches Used in the Literature ... 7
3.2 Recovered Finite Volume Scheme ... 10
3.3 Boundary Condition ... 16
3.4 Solvers of Linear Systems ... 18
3.4.1 Explicit Method ... 18
3.4.2 GMRES (generlized minimum residual) Method ... 19
3.4.3 Numerical Jacobian Matrix ... 20
4 An Accuracy and Positivity Analysis of Numerical Methods for Diffusion Equation ... 27
4.1 Tools Nedded to Assess the Accuracy and Positivity ... 27
4.2 An Assessmentof Numerical Methods for Diffusion Equation ... 31
4.2.1 Model Grid Topologies and Formulae ... 31
4.2.2 An Accuracy and Positivity Analysis ... 33
5 Numerical Experiments ... 40
5.1 Error Measurement and Condition Number ... 40
5.1.1 Error Measurement ... 40
5.1.2 Condition Number ... 41
5.2 An Analysis of Accuracy ... 44
5.2.1 Order of Accuracy on Different Meshes ... 44
5.2.2 Order of Accuracy for Different Tensors ... 50
5.2.3 Order of Accuracy on Distorted Meshes ... 55
5.2.4 Order of Accuracy on stretched Meshes ... 60
5.3 Discrete Maximum Principle ... 63
5.4 Non-smooth Anisotropic Solution ... 69
5.5 Heterogeneous Diffusion Tensor ... 71
5.6 Accuracy Study with Different Distorted Parameters ... 74
5.7 Iterative Method and Preconditioners ... 78
6. Concluding Remarks ... 84
References ... 85
APPENDIX ... 89
List of Figures
Figure 3.1 Calculation of gradients at cell interfaces using the divergence theorem in
2D ... 8
Figure 3.2 Calculation of gradients at cell interfaces using the modified averaging in 2D ... 10
Figure 3.3 Representation of in-cell recovery in 2D, cell i and its neighboring cells ... 12
Figure 3.4 Representation of union of cell i and cell j for inter-cell recovery in 2D ... 13
Figure 3.5 Residual equation of cell marked with “ ” only depends on its neighboring cells and neighbors of neighbors. ... 23
Figure 4.1 Grid and nomenclature for uniform Cartesian grid ... 32
Figure 4.2 Grid and nomenclature for uni-dimensionally stretched Cartesian grid... 33
Figure 4.3 Sample reconstruction, diamond path, uniform cartesian. ... 34
Figure 4.4 Gradient computation based on divergence theorem using uniform Cartesian grid. ... 35
Figure 4.5 Gradient computation based on divergence theorem using uni-dimensionally stretched Cartesian grid. ... 36
Figure 4.6 Representation of cells involved in the 13-points stencil for the recovered finite volume method.. ... 39
Figure 5.1 Computational domain Ω and meshes used in section 5.2: structured mesh (a), unstructured mesh (b), and anisotropic mesh (c). ... 46
Figure 5.2 The plot of log(error) versus log(h) corresponding to Table 6(picture a) and the plot of log(error) versus log(h) corresponding to Table 7(picture b) ... 48
Figure 5.3 The Plot of Error comparison with CDG method corresponding to Table 8, test case 1 on structured mesh(Figure 5.1(a)) ... 49
Figure 5.4 Plot of log(error)_vs_log(h) corresponding to Table 9 (a) and plot of log(error)_vs_log(h) corresponding to Table 10 (b) ... 53
Figure 5.5 Solution profile for test case 3 on unstructured mesh: exact solution (a), and numerical solution (b) ... 53
Figure 5.6 Solution profile for test case 4 on unstructured mesh: exact solution (a), and numerical solution (b) ... 54
Figure 5.7 Comparisons with modified averaging method for test case 3 on structured mesh (picture a), unstructured mesh (picture b) and anisotropic mesh (picture c ) ... 55
Figure 5.8 Mesh used in section 5.2.3: Uniform triangular mesh (a), and randomly distorted triangular mesh (b). ... 56
Figure 5.9 Plot of log(error)_vs_log(h) for test case 5 (a) and Plot of log(error)_vs_log(h) for test case 6 (b). ... 58
Figure 5.11 Meshes used in section 5.2.4: symmetric uni-dimensionally stretched
mesh (picture a) and non-symmetric uni-dimensionally stretched mesh (picture b)... 60 Figure 5.12 Comparative plots of log(h)_vs_log(error)corresponding to table 13:
symmetric uni-dimensionally stretched mesh (picture a) and non-symmetric
uni-dimensionally stretched mesh (picture a) ... 62 Figure 5.13 Solution profile (a), mesh used (b), and Subdomain where solution is
negative (c) on structured mesh. ... 65 Figure 5.14 Solution profile (a), mesh used (b), and Subdomain where solution is
negative (c) on unstructured mesh ... 66 Figure 5.15 Solution profile(a), mesh used(b), and Subdomain where solution is
negative(c) on and anisotropic mesh ... 67 Figure 5.16 Solution profile(a), mesh used(b), and Subdomain where solution is
negative(c) on structured mesh with a hole at the center ... 68 Figure 5.17 Solution profile for test case 10 on computational domain with a square
hole (shown in Figure 5.16(b)) ... 70
Figure 5.18 Chess board distribution of the parameters of tensor D3 and minimum
values of each subdomain, with fixed k11000, k2 1 ... 72 Figure 5.19 Profile of discrete solution corresponding to Figure 5.18 (a) and
subdomain where solution is negative (b) ... 73
Figure 5.20 Chess board distribution of the parameters of tensor D3 and minimum
values of each subdomain, with changing k1 and k2 ... 73
Figure 5.21 Profile of discrete solution corresponding to Figure 5.20 (a) and
subdomain where solution is negative (b) ... 74 Figure 5.22 Mesh before being distorted (picture a); randomly distorted mesh with
k=0.4 (picture b); randomly distorted mesh with k=0.8 (picture c) used in section 5.6 ... 76 Figure 5.23 Plot of Log(error) vs log(h) for test case 12 corresponding to Table 16 ... 77 Figure 5.24 Convergence history versus time steps (a) for test case 13 on structured
mesh using different schemes: Explicit, GMRES, GMRES+Diagonal, GMRES+LU-SGS, GMRES+ILU. And Convergence history versus CPU time (b) for test case 13 on structured mesh using different schemes: Explicit, GMRES, GMRES+Diagonal,
GMRES+LU-SGS, GMRES+ILU ... 81 Figure 5.25 Convergence history versus time steps (a) for test case 13 on
unstructured mesh using different schemes: Explicit, GMRES, GMRES+Diagonal, GMRES+LU-SGS, GMRES+ILU. And Convergence history versus CPU time (b) for test case 13 on unstructured mesh using different schemes: Explicit, GMRES,
GMRES+Diagonal, GMRES+LU-SGS, GMRES+ILU ... 82 Figure 5.26 Convergence history versus time steps (a) for test case 13 on anisotropic
GMRES+ILU. And Convergence history versus CPU time (b) for test case 13 on anisotropic mesh using different schemes: Explicit, GMRES, GMRES+Diagonal,
GMRES+LU-SGS, GMRES+ILU ... 83
Figure A1. Representation of in-cell recovery in 1D, cell i and its neighboring cells... 90
Figure A2. Representation of union of cell i and cell i+1 for inter-cell recovery in 1D... 91
List of Tables
Table 1. Effectiveness of numerical Jacobian evaluation using CPR scheme ... 26
Table 2. Maximum condition number on the structured meshes(shown in Figure5.1(a)) ... 43
Table 3. Maximum condition number on the unstructured meshes(shown in Figure5.1(b)) ... 43
Table 4. Maximum condition number on the anisotropic meshes(shown in Figure5.1(c)) ... 44
Table 5. Maximum condition number using QR approach and normal equation approach on different kinds of meshes. ... 44
Table 6. Analysis of accuracy for test case 1 on different meshes ... 47
Table 7. Analysis of accuracy for test case 2 on different meshes ... 48
Table 8. Error comparison with CDG, test case 1 on structured mesh [9] ... 49
Table 9. Analysis of accuracy for test case 3 on different meshes ... 52
Table 10. Analysis of accuracy for test case 4 on different meshes ... 52
Table 11. Analysis of accuracy for test case 5 and test case 6 on randomly distorted triangular meshes ... 58
Table 12. Error comparison with non-linear FV method, test case 6 on distorted meshes [2] ... 59
Table 13. Analysis of accuracy for test case 7 on symmetric uni-dimensionally stretched mesh and non-symmetric uni-dimensionally stretched mesh ... 61
Table 14. Computed Maximum and minimum values on different meshes used in section 5.3 ... 65
Table 15. Analysis of accuracy for test case 10 on computational domain with a square hole (shown in Figure 5.16(b)) ... 70
Table 16. Analysis of accuracy for test case 11... 77
Table 17. Condition number for different distortion parameters using test case 12 ... 78
Table 18. Time steps and CPU time needed for a variety of preconditioners on structured mesh (shown in Figure5.1(a)) ... 80
Table 19. Time steps and CPU time needed for a variety of preconditioners on unstructured mesh (shown in Figure5.1(b)) ... 81
1 Background Introduction
In recent years, a great deal of effort has been made in developing finite
volume methods to solve the compressible Navier-Stokes equations on unstructured
grids. There exist two major classes of the finite volume methods: cell-centered and
vertex-centered finite volume methods. A vertex-centered finite volume method is
more popular when used for discretizing the viscous fluxes in the Navier-Stokes
equations, since it avoids the difficulty for the discretization of the viscous fluxes by
using a hybrid formulation, where the discretization of the inviscid fluxes is carried
out via vertex-centered finite volume and finite element approximation is used for
the discretization of the viscous fluxes. The cell-centered finite volume method is
also widely used to solve compressible Navier-Stokes equations in engineering due to
the satisfaction of the integral form of the conservation law and its simplicity of
implementation. However, it does not possess the natural tools for gradient
calculation and interpolation [7]. In the case of structured grids, the discretization of
the diffusive fluxes is straightforward, where the gradients are usually estimated by
central differencing in the corresponding curvilinear coordinates direction.
However, the approximation of gradients using a cell-centered finite volume method
is considerably more complicated on unstructured grids.
Any ideal scheme for discretization of viscous fluxes should have the following
I have higher than the first order of accuracy for smooth solutions;
II be locally conservative;
III be monotone, i.e. preserve positivity of the differential solution;
IV be reliable on unstructured anisotropic meshes that may be severely distorted;
V allow heterogeneous full diffusion tensors;
VI be compact.
Researchers have suggested a lot of methods for gradient
reconstruction/recovery based on finite volume methods. Some linear schemes [3, 4,
5, 8, 33, 34, 35] have been developed to evaluate the gradients of the flow variables
at the interfaces. Though all of them have one or more of above desired properties,
no linear scheme possessing all of the six properties has been developed. There are
two common approaches suitable for unstructured grids, which are frequently used
in the literature to estimate the gradients of the flow variables at the cell interfaces:
1) Gradient computation based on divergence theorem [8], i.e. so-called diamond
control volume. 2) Gradient computation based on a modified averaging of gradients
[33, 34, 35]. Unfortunately, neither of these two methods can achieve accuracy and
positivity simultaneously on arbitrary grids according to the detailed analysis by
Coirer [37] and Haselbacher [36]. Moreover, both of them are not compact and not
consistent on highly distorted grids.
Discontinuous Galerkin methods (DG) have also been used for solving diffusion
discontinuous galerkin) methods for convection-diffusion problems. This method is
attractive due to its extremely high parallelizability and its high-order accuracy. More
recently, J. peraire [9] presented a compact discontinuous Galerkin (CDG) method
for an elliptic model. CDG method is related to the LDG method, but unlike the LDG
method, the sparsity pattern of the CDG method only involves nearest neighbors and
the CDG method works without stabilization for an arbitrary orientation of the
element interfaces [9]. These two methods are working well without a
heterogeneous full diffusion tensor. However, no numerical experiment has been
performed to test heterogeneous full diffusion tensors or to prove the monotonicity
in [9, 10].
It is clear that the most difficult requirement to be satisfied is the monotonicity,
which guarantees the solution of a system of linear algebraic equations will be
non-negative for any non-negative right-hand side [15]. Ordinary finite element
method and finite volume method fail to preserve monotonicity for full diffusion
tensors or on general meshes [6, 15]. Some non-linear schemes satisfying the
monotonicity on unstructured meshes have been proposed by Burman and Potier
[13,14]. However the numerical experiments in [14] showed that the scheme is
monotone only when solving parabolic equations with sufficiently small time steps.
Lipnikov [2] further developed and analyzed the non-linear finite volume scheme
proposed in [14] by giving correct positions of collocation points for the case of a full
improve robustness of the scheme for problems with strong anisotropy and sharp
gradients.
Although non-linear schemesthat have all six properties for solving diffusion
equations are available, the extension of these non-linear schemes for discretizing
the viscous fluxes in the Navier-Stokes equations is not straightforward. The main
objective of effort discussed in this work is to derive a recovery scheme possessing as
many properties as possible based on cell-centered finite volume method for
diffusion equations and this scheme can be directly extended for discretizing the
viscous and heat fluxes in the compressible Navier-Stokes equations. First, starting
from the cell-average finite volume solution, a piecewise linear polynomial solution
on the union of two cells adjacent to an interface is recovered by the processes of
in-cell recovery and inter-cell recovery. Second, methods for solving the
over-determined systems generated by inter-cell recovery are discussed. Third, we
analytically demonstrate the present scheme is second order of accuracy using one
dimensional uniform grid. Fourth, the RFV scheme is numerically proved to preserve
second order of accuracy imposing no constraints on analtical functions, tensors.
Fifth, monotonicity (in the sense of solution positivity) of this scheme is tested under
a variety of conditions. Sixth, numerical experiments are performed to solve
non-smooth anisotropic problem and to compute problems with heterogeneous
parameters are studied to investigate the ability of this scheme to deal with seriously
distorted meshes.
Another objective of this work is to compare the effectiveness of techniques
for solving systems of linear equations. Applying the present RFV method rises a
system of linear equations (ncellncell ), which can be solved explicitly to achieve a
steady-state solution using a pseudo-time approach. Although, explicit methods
require only limited storage and are easy to implement, the rate of convergence of
explicit methods slows down dramatically for large-scale problems, resulting in
inefficient solution techniques [17]. In order to improve convergence, implicit
methods such as iterative solution methods and approximate factorization methods
are developed [see, e.g.18, 19, 20]. One of the most successful iterative methods is
GMRES algorithm using the Krylov subspace method [21]. GMRES algorithm with
Preconditioners has been widely used for solving non-symmetric linear systems due
to its high efficiency. The effectiveness of preconditioners such as diagonal
preconditioner, Lower-Upper Symmetric Gauss Seidel (LU-SGS) preconditioner and
Incomplete Lower Upper (ILU) preconditioner are compared and an accurate and
efficient method to compute numerical Jacobian matrix is also discussed in this work.
The outline of the paper is structured as follows: The diffusion problem is formulated
in chapter 2. Numerical method is presented in chapter 3. An assessment of
numerical methods is analyzed in chapter 4. Numerical experiments are reported in
2. Problem Definition
Let Ω be a two-dimensional bounded computational domain with boundaries
N
D
. Ddenotes the boundaries with Dirichlet boundary condition,
and N the boundaries with Neumann boundary condition. The diffusion
problem is defined as:
(Du) f in
D
g
u on D (2.1)
N
g n u
D
on N
where f is a given function and u=u(x,y) is analytical function to be determined. n
3. Numerical Method
Finite volume methods are employed to solve diffusion equation by integrating
diffusion equation (2.1) over cell i, to give:
(DU) (3.1)
where i is the volume of cell i in the context of finite volume method in
three-dimensional space (3D), and is the area of cell i in two-dimensional space (2D).
Then applying green’s theory to equation (3.1), equation (3.2) is obtained as:
(DU|f)n (3.2)
where j
y U i x U U
f f
f
| , i.e. the gradients at faces of , and
f
x U
,
f
y U
are the components of gradients in x and y directions respectively.
Since F is a known function, the integration of F, i.e., the right hand side of
equation (3.2) can be trivially obtained. Now the objective is to recover or
reconstruct continuous gradients at faces U f, using underlying cell-average finite
volume solution.
3.1 Common Approaches Used in the Literature
Two common approaches frequently used in the literature to estimate the
gradients of the flow variables at the cell interfaces are presented in this section: 1)
Gradient computation based on divergence theorem. 2) Gradient computation based
highly depend on meshes. A compromise between accuracy and positivity has to be
made since they cannot be achieved simultaneously on arbitrary meshes [36, 37].
Approach 1: Gradient computation based on divergence theorem
Coirer [37] developed a method for the computation of the gradients at cell
interfaces using the divergence theorem. A so-called diamond control volume is
formed by connecting the two vertices of a face with the centroids of cells which
share the interface, see Figure 3.1(a). The values of variables at the vertices are
determined by weighted-averaging based on the pseudo-Laplacian formula [38], see
Figure 3.1(b).
(a) Diamond control volume (b) Averaging at a node
Symbol legend: cell centroid, node, target interface,
faces of diamond control volume
This approach is obviously not compact, and even not grid-transparent, since
information from node-sharing cells is needed to estimate the averaged values at the
vertices as shown in Figure3.1(b).
Approach 2: Gradient computation based on modified averaging
A different approach for the computation of the gradients at the cell interfaces
is based on modified averaging of gradients. An initial value for the gradient at the
cell interfaces may be obtained by simply averaging the gradients of the two adjacent
cells, UL
(left cell), and UR
(right cell), to give
) (
2 1
R L
avg U U
U
(3.3)
This scheme leads to an odd-even point decoupling, that can be remedied by
applying a correction in the direction
L R
L R RL
r r
r r
s
, where rR and rL denote
position vectors for the center of the left and right cells. sRL
is the unit vector that
connects the centroids of the left cell and the right cell of the interface. The gradient
of the interface is finally obtained as:
RL L R
L R RL avg avg
face r r s
U U s U U
U
) (
(3.4)
Although approach 2 is not compact, since it involves the neighbors of the
neighbors due to the computation of gradients in each cell, it is grid-transparent, see
Symbol legend: cell centroid, node, target interface
Figure 3.2Calculation of gradients at cell interfaces using the modified averaging in 2D.
Unfortunately, neither of these two approaches possesses all the properties
given in the background introduction of this paper. Both of them are not consistent
on non-uniform meshes, and neither of them can satisfy discrete maximum principle
(DMP) without imposing severe restrictions on both meshes and problem
coefficients, as shown in chapter 4. A detailed accuracy and consistency analysis of
these methods is presented in chapter 4. Indeed, a second order cell-centered
grid-transparent finite volume scheme on non-uniform and highly distorted grids for
diffusion equations is still at large.
3.2 Recovered Finite Volume Scheme
presented for solving the diffusion equation on triangular grids. The developed RFV
can be extended for the discretization of the viscous and heat fluxes in the
Navier-Stokes equations. The RFV method is established by the following two steps:
In-cell recovery and Inter-cell recovery.
First step: In-cell recovery
In-cell recovery recovers a piecewise linear polynomial solution in each cell
from the underlying cell-average finite volume solution. The linear polynomial
solution in cell i can be expressed as:
i i i
i i
i
y U y y x U x x U U
( ) ( ) (3.5)
where and are gradient components of cell in x and y directions
respectively, and Ui is cell-average value of .
We consider cell and its three face-neighboring cells: , ,and ,
shown in Figure 3.3. Imposing that the integral of ui is equal to the integral of each
of its neighboring cells respectively yields:
(3.6)
Equation (3.6) leads to three equations as following:
Figure 3.3Representation of in-cell recovery in 2D, cell i and its neighboring cells.
Since the dimension of the polynomial space is three, we have three basis
functions:
1
1
B , B2 xxi, B3 yyi (3.8)
The basis functions should be normalized to improve the conditioning as:
1
1
B , B2 (xxi)/x, B3 (yyi)/y (3.9) where x0.5(max(x)min(x)) , and y0.5(max(y)min(y)) , and max(x),
max(y) are the maximum coordinates in the cell , while min(x), min(y) the
minimum coordinates. Equation (3.7) can then be rewritten in matrix form as:
Solving the over determined system (3.10) based on the least-squares sense,
the two unknowns , and are obtained.
Second step: inter-cell recovery
Inter-cell recovery estimates a piecewise linear polynomial solution on each
union (as shown in Figure 3.4) composed of two adjacent cells based on recovered
linear polynomial solution in each cell by using a Taylor series expansion at the
centroid of the union. The linear solution of the union can be expressed as:
ij ij ij
ij c
R ij
y U y y x U x x U U
( ) ( ) (3.11)
where Uc represents the value of variable at the centroid of union of i and j,
ij
x and yij the coordinates of the centroid, and ij
x U
,
ij
y U
gradients of solution
U in the union of i and j.
Figure 3.4Representation of union of cell i and cell j for inter-cell recovery in 2D
Equation (3.11) can be further expressed using cell-average value:
j
ij ij ij ij ij R ij y U y y x U x x U U
( ) ( ) (3.12)
where Uij is the cell-average value in the union.
Inter-cell recovery is accomplished by requiring:
j k j j k R ij i k i i k R ij d B u d B u d B u d B u j j ii k=1,2,3 (3.13)
where B1i 1 , B2i xxi , B3i yyi for i and B1j 1 , B2j xxj ,
j
j y y
B3 for j, B1ij 1 , B2ij xxij, B3ij yyijfor the union of i and
j
,and Ui , Uj are piecewise linear polynomial solution:
,
. (3.14)
Equation (3.13) yields 6 equations, and there are three degrees of freedom, i.e.
three unknowns (Uij ,
ij x U , ij y U
) are to be determined, so this is an
over-determined system(63). Note that the RFV scheme has to obey the conservation. In this case, the cell-average value Uij can be obtained by
conservation: j i j j i i ij U U U
(3.15)
Michael Dumbser [22] solved over-determined systems like this using the
constrained least-squares technique by introducing Lagrange Multiplicator .
(), thus equations (3.13) become a system of 6 equations and 4 unknowns. On the
contrary, we are trying to reduce one degree of freedom by taking Uij as a constant,
since to calculate Uij is trivial (the constrained least-squares technique also
requires the computation of Uij).
Actually, when B1 1, Equation (3.11) leads to the following two equations:
j j j j j j j i j ij ij ij ij ij i i i i i i i ij ij ij ij ij d y U y y x U x x U d y U y y x U x x U d y U y y x U x x U d y U y y x U x x U i i ) ) ( ) ( ( ) ) ( ) ( ( ) ) ( ) ( ( ) ) ( ) ( ( (3.16)Simply solving these two equations in (3.16), we also get
j i j j i i ij U U U .
In this sense, if we take Uij as a constant, two of the six equations in (3.13) have
already been used to compute Uij. However, the solution from the remaining four
equations and 2 unknowns are different from the solutions obtained using the
constrained least-squares technique. In the present work, we involve the first two
equations (3.16) again and then the linear system becomes a (62) system, instead of (64) with constrained least-squares technique. This simplified system
of 6 equations and 2 unknowns leads to the same solution as the constrained
least-squares technique.
Again, the basis functions should be normalized to improve the conditioning:
1
1i
B , B2i (xxi)/xi , B3i (yyi)/yi for i
and 1
1j
B ,
j j
j x x x
ij ij
ij y y y
B3 ( )/ for the union of i and j.
where xi, yi, xj, yj, xij , yij are half of the maximum coordinates
minus the minimum coordinates in the cells , , , respectively, i.e.
)) min( ) (max( 5 .
0 x x
x
, and y0.5(max(y)min(y)).
Equation (3.13) can then be rewritten in matrix form as:
j j i i j j i i i i i j i j j i j i j i i i j j j j j j j j j j i i i i i i i i i i j j j j j j j j j j i i i i i i i i i i j j ij j j i ij i i ij ij ij j j ij i i ij j j ij j j ij i i ij j j ij i i ij j ij i ij i i ij j j ij i ij d B B y y U d B B x x U d B B y y U d B B x x U d B B y y U d B B x x U d B B y y U d B x x U d U d U d U d U y y U x x U d B B d B B d B B d B B d B B d B B d B B d B d B d B B d B d B 3 3 3 2 3 3 3 2 2 3 2 2 2 3 2 2 ij 3 3 3 3 2 3 3 2 3 2 2 2 2 3 3 3 2 2 2 2 B(3.17)
Note that some coefficients of (3.17) are of the form of integral of quadratic
function. This over-determined linear system of 6 equations for 2 unknowns can be
solved in the least-squares sense by normal equation approach or QR decomposition
approach. The conditioning of these two methods will be discussed in chapter 4.
Order of accuracy of the developed RFV scheme is analytically proved using
non-uniform mesh in one space dimension for the sake of brevity, see appendix A.
3.3 Boundary Conditions
Both of Dirichlet boundaries (D) and Neumann boundaries (N) can be
Dirichlet boundary condition:
Dirichlet boundary condition specifies the solution values on the boundary of
the domain. The values of ghost cells, which are required in the process of in-cell
recovery, are set as:
i b
g U U
U 2 (3.18) where Ugdenotes the value of the ghost cell, Ub the value of boundary and Ui
the value of boundary cell adjacent to the ghost cell.
The gradients of boundary faces are obtained by the process of inter-cell
recovery. The union, in which a linear polynomial is recovered, includes a boundary
cell and a ghost cell, but the gradient of the boundary is computed using only three
equations from boundary cell by one-side inter-cell recovery as:
i k i i k R
ijB d u B d
u
i i
, k=1,2,3 (3.19)
Neumann boundary condition:
Neumann boundary condition specifies the values the derivative of a solution is to take on the boundary of the domain. The values of ghost cells that are also
needed for Neumann boundary condition in in-cell recovery are estimated by:
) (
)
( g i
f i
g f i
g y y
y U x
x x U U
U
(3.20)
where Ugdenotes the value of the ghost cell, Ui the value of boundary cell
centroid of ghost cell, and
f
x U
,
f
x U
the gradients of boundary faces. Note that
the gradients of boundary faces are given. Therefore there is no need to compute
gradients of boundary faces where Neumann boundaries are imposed.
3.4 Solvers of Linear Systems
3.4.1 Explicit Method
The simplest method to obtain a steady-state solution is to solve equation (3.4)
explicitly by introducing a pseudo time term:
i f
i D U nds Fd
d t U
i i
i
) (
(3.21)
Using Ri(x) to denote D U f nds Fd i
i i
)
( , which has been calculated by
the process of recovery, and replacing d i
t U
i
with i
n i n i
t U U
1
, equation (3.21)
becomes:
) ( Ri 1
x t U U
i n i n
i
(3.22)
) (
Ri x is the right-hand-side residual that is equal to 0 for steady state. It is easy to update solutions explicitly according to equation (3.22). However, low
convergence rate of explicit methods results in hundreds of thousands of time steps
to achieve a steady state for large scale problems. Therefore, it is desirable to employ
3.4.2 GMRES (generalized minimum residual) Method
GMRES algorithm combined with a variety of preconditioners is used to solve
the systems of equations in this work. GMRES approximates the exact solution of
b u
A (3.23)
by minimizing the norm of the residual Au-b. The use of preconditioners is to
reduce the condition number of a problem, so that the given problem is more
efficient and robust for GMRES. The preconditioned GMRES involves solving an
equivalent linear system:
b ~ u A~
(3.24)
by pre-multiplying the original linear system with some preconditioning matrix P:
b P u A
P-1 1
(3.25)
The best preconditioning matrix for A would cluster as many eigenvalues as
possible at unity, therefore, the optimal choice of P is A, in which case the underlying
matrix problem for GMRES is trivially solved with one Krylov vector [17]. In the
present work, three preconditioners: diagonal preconditioner( PD), LU-SGS
preconditioner(P(DL)D-1(DU)), and ILU preconditioner(PL~U~) are used to test their effectiveness.
L, D, and U are strictly lower part, diagonal, and upper part of numerical
3.4.3 Numerical Jacobian Matrix
The Jacobian matrix can be defined as:
n n n n n n x R x R x R x R x R x R x R x R x R 2 1 2 2 2 1 2 1 2 1 1 1 R x
J( ) (3.26)
However, The analytical Jacobian becomes more and more difficult as the
complexity of discretized residual equations increases, which makes it impossible to
always use analytical Jacobian. Numerical Jacobian evaluation has been used to
approximate the analytical Jacobian calculation by adding a small number as
perturbation in the finite difference method. The numerical Jacobian can be
estimated by one-sided derivatives as [24]:
) ( )
(x e R x
R
x
R i j i
j i (3.27) where 0 1 0 j
e is the th
j unit vector, in which the value of the th
j component
is one, while the values of all other components are zero.
Typically, two disadvantages occur when it comes to Numerical Jacobian. One
is the accuracy problem and the other is that to obtain the numerical Jacobian may
cost long computation time.
perturbation magnitude , since is related to both truncation error and
condition error [25]. While truncation error is associated with neglected terms in the
Taylor’s series expansion, condition error is due to loss of computer precision. Sang
and Jae [24] developed a method to find a perturbation magnitude with minimum
error. According to this method, the total error in the numerical calculation of the
first derivative of function f(x) is expressed as:
2 ) ( 2
)
( 2
2
x f E
E R
total
(3.28)
where ER is round-off error due to the machine precision.
The first term of equation (3.28) comes from condition error and the second
term is caused by truncation error. It is observed from equation (3.28) that if is
relatively large, truncation error is the main error and if the is relatively small, condition error becomes the dominant factor. The optimal perturbation magnitude
is the one that makes Etotal the smallest by differentiating Etotal with respect
to :
0 ) ( 2 1 2 ) (
2 2
2
x f E
Etotal R
(3.29)
Assuming the order of the second derivative to be one may not introduce large
errors, and the bound of round-off error is the precision error which can be taken as
the machine zero for both single and double precision cases[24]. Equation (3.29)
becomes:
M opt2 E
where EM is machine zero that depends on both computers and compilers.
All the calculations of this study are realized on a 2.67 GHz Inter Xeon W3520
CPU with gfortran compiler using double precision. Machine zero is defined as the
smallest number that the computer can recognize. In this work, EM is estimated as
follows:
2 Repeat )
0 . 1 0
. 1 (
2 2
1 1
M
M M
M
E if
E E
E
(3.31)
Numerical experiments according to equation (3.31) show that EM of the
machine we use is 16
10 22 .
2 . Machine zero can also be obtained by using internal function of ifort compiler: EM epsilon(x). If x is declared to be a single precision variable, the output will be the machine zero of single precision while if x is declared
to be a double precision variable, the output will be the machine zero of double
precision.
The numerical Jacobian matrix is composed of partial derivatives of each
residual R(x) with respect to every variable. The main computation work is due to the
need for calculating the residual vector with each perturbed variables for all cells.
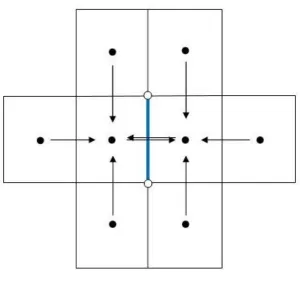
Fortunately, most of the derivatives are zero since the residual equation only
depends on the given cell itself, its face-sharing neighbors and neighbors of
neighbors (Figure3.5). On 2D triangular meshes, residual equation of a particular cell
neighbors of nearest neighbors, so perturbed residual equations are computed only
with variables in these cells to reduce the computation time.
Figure 3.5Residual equation of cell marked with “ ” only depends on its neighboring cells and neighbors of neighbors.
A direct method to implement this idea is to calculate one single residual
equation Ri rather than the whole vector R
using a subroutine. But, this would
require calling the subroutine for thousands of times, and a large number of
calculations for gradients recovery which can be reused are recalculated in the
process of computing residual equations separately. A more efficient method
proposed by Curtis, Powell and Reid (CPR scheme) has been used to reduce the
computation time in the present work. CPR scheme divides the columns of Jacobian
matrix into groups in such a way that the first group is established by including each
column that has no non-zero entry in the same row and the other groups are formed
in any group[32]. The initial residual vector R(x) is obtained by using initial value of
x(subroutine call is needed once), and one further subroutine call is needed for each
group by changing all variables x which correspond to the columns included in a
given group by . Suppose that the columns of Jacobian matrix can be divided into
m groups, then the total number of subroutine calls required is reduced from n+1 to
m+1, where n is the number of cells or the number of columns. Note that although
we can apply CPR scheme to any matrix, the improvement for non-sparse matrices is
little, if any. For example, applying CPR to a full matrix may lead to n groups which
means each column itself becomes a group. In this special case, CPR scheme cannot
reduce computation time. The best CPR can do is to compact all columns of a matrix
into only one group, which happens when CPR scheme is applied to any diagonal
matrix.
Example:
By applying CPR scheme to a tri-diagonal matrix as below, column1 and 4 are
included in group1; column2 and 5 are included in group2; column3 and 6 are
included in group3, and thus this tri-diagonal matrix is divided into 3 groups and 3
subroutine calls are needed to evaluate the whole Jacobian matrix.
G1: C1+C4 G2: C2+C5 G3: C3+C6 Applying CPR 6 5 4 3 2
1 C C C C C
C 66 65 56 55 54 45 44 43 34 33 32 23 22 21 12 11 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 B B B B B B B B B B B B B B B B 3 2
1 G G
Note that when we only need the diagonal entries of the Jacobian matrix (for
example if diagonal preconditioner is used), the number of groups can be even less,
since we just need to make sure that no non-zero entries are included in the same
row position where a diagonal element exists. The same tri-diagonal matrix can be
divided into only two groups and only 2 subroutine calls are needed to evaluate all
diagonal entries of Jacobian matrix.
G1: C1+C3+C5
G2: C2+C4+C6 Applying CPR
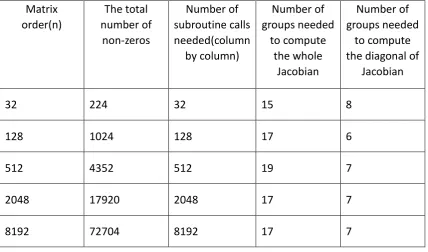
For all numerical experiments used in this work, the number of groups needed
is between 15 and 19 by applying CPR scheme to the Jacobian matrices. For example,
the Jacobian matrix of a 64cells64cells mesh, which has 8192 columns, can be divided into 17 groups, so that the subroutine calls are reduced from 1+8192 to 1+17
for the whole Jacobian matrix. The same matrix is compacted into only 7 groups for
evaluation of diagonal entries of Jacobian matrix, see Table. 1.
6 5 4 3 2
1 C C C C C
Table 1
Effectiveness of numerical Jacobian evaluation using CPR scheme.
Matrix order(n)
The total number of
non-zeros
Number of subroutine calls needed(column
by column)
Number of groups needed
to compute the whole
Jacobian
Number of groups needed
to compute the diagonal of
Jacobian
32 224 32 15 8
128 1024 128 17 6
512 4352 512 19 7
2048 17920 2048 17 7
4 An Accuracy and Positivity Analysis of Numerical Methods
for Diffusion Equation
Two existing common methods and the developed RFV method for diffusion
equations have been presented in chapter 3. A detailed accuracy and positivity
analysis of these methods is studied in this chapter.
4.1 Tools Needed to Assess the Accuracy and Positivity
Laplace’s equation:
It is convenient to assess the discretization of diffusion equation or the viscous
terms of Navier-Stokes equations by investigating the discretization of Laplace’s
equation since the viscous term is reduced to Laplace’s operator, for incompressible
flows and constant viscosity. Laplace’s equation is written as:
0
2
U (4.1)
Equation (4.1) can also be obtained from diffusion equation (2.1) by setting
diffusion tensor D to be constant and right hand side f to be 0.
Discrete maximum principle (DMP):
Maximum principle that is held by the solution of Laplace’s equation, states that the maxima of a function appear on the boundaries of the domain. When
Maximum principle is interpreted on a discrete level, the DMP implies that the value
conditions upon the coefficients in the stencil so that the approximation can satisfy
the DMP. If a stencil obtained by some method to solve Laplace’s equation is an
N-points stencil, it can be written as:
0 )
(
0
2
N
i i iU
U L
U
(4.2)
where N denotes the total number of the support cells, and i the coefficients in
the stencil. The support cells used contain at least the nearest neighbors to U0. Thus
equation (4.2) can be rewritten for solving U0 as :
N
i i iU
U
1
0 (4.3)
where
0
i
i . The discrete maximum principle then requires that U0 is
bounded by its neighboring cells:
) , , max( )
, ,
min(U1 U1 UN U0 U1U1 UN (4.4) A sufficient condition to satisfy (4.4) is to require all the coefficients of its
neighbors to be non-negative, i.e. i 0. A scheme satisfying (4.4) discretely
preserves an important physical property of the Laplacian: it satisfies the maximum
principle.
Accuracy:
The accuracy of the discretization of diffusion equation is investigated by
2 2 0 2 2 2 0 2 0 0 0 ) ( 2 1 ) ( 2 1 ) ( ) ( ) ( y U x U y U x U U L N i i i N i i i N i i i N i i i N i i
x y
U N i i i i 2 0 ) ( 2
1
(4.5)
where i xi x0, i yi y0.
For a discretized Laplacian to have a truncation error of second order, the
following set of conditions for the i must be met:
N i i 0 0 (4.6)
N i i i 0 0 (4.7)
N i i i 0 0 (4.8)
N i i i 0 2 2 (4.9)
N i i i i 0 0 (4.10)
N i i i 0 2 2 (4.11)
N i i i 0 3 0 (4.12)
N i i i i 0 2 0 (4.13)
N i i i i 0 2 0
N
i i i 0
3 0
(4.15)
The conditions given by equation (4.6) to (4.15) guarantee a consistent, second-order
approximation, while the conditions set by equation (4.6) to (4.11) lead to a
consistent first-order approximation. The Laplace operator can then be written as :
) ( )
(U 2U O h2
L (4.16)
for a second-order accurate method, and a first-order accurate scheme can be
written as:
) ( )
(U 2U O h
L (4.17)
where h is the mesh size.
Consistency:
The Laplacian that is found to be :
) ( ) (
1 ) (
)
( 2
2 5 2 4 2 2 3 2
1 O h
y U k y x
U k x
U k h y U k x U k U
L
(4.18)
is termed consistent if all of the following requirements (given by equation (4.19 to
4.23)) are satisfied:
0
1
k (4.19)
0
2
k (4.20)
1 3
k (4.21)
0
4
k (4.22)
1 5
k (4.23)
inconsistent, and if either k1 0 and/or k2 0, this type of truncation error will be termed as dangerously inconsistent. In this case, the error increases when the
mesh is refined and even grid convergence to the wrong solution can never be
achieved. Both of inconsistent and dangerously inconsistent approximations should
be avoided.
4.2 An Assessment of Numerical Methods for Diffusion Equation
An assessment of some common schemes used in the literature to estimate
the gradients at the cell interfaces is made in this section. The accuracy is analyzed
by applying Taylor series expansion to Laplace equation on the following two types of
grids: uniform Cartesian grid and uni-dimensionally stretched Cartesian grid, as
shown in Figure 4.1 and Figure 4.2. The assessment of positivity is then obtained by
examining the coefficients of the stencil.
4.2.1 Model Grid Topologies and Formulae
The Laplace operator on the model grid topologies is shown in this section.
The Laplace operator on the uniform Cartesian grid (shown in Figure 4.1) for U0 is
given by:
) (
1 )
( 0 Ux,E Ux,W Uy,N Uy,S h
U
L (4.23)
where Ux,E, Ux,W, Uy,N, and Uy,S denote the recovered/reconstructed gradients
NW N NE h
N y
U ,
W Ux,W 0 Ux,E E h
S y
U ,
SW S SE h h h h
Figure 4.1Grid and nomenclature for uniform Cartesian grid.
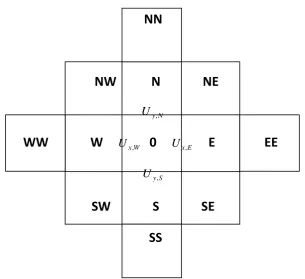
For the uni-dimensionally stretched Cartesian grid (shown in Figure 4.2), the
Laplace operator for U0 reduces to :
)] (
[ 1 )
( 0 Ux,E Ux,W Uy,N Uy,S h
U
L (4.24)
The cells of the uni-dimensionally stretched Cartesian grid are only stretched in the
y-direction uniformly. The stretching ratio is defined as:
S N
y y y
y
0
0
(4.25)
and the aspect ratio is given by:
0
y h
(4.26)
so that the distances in centroid heights is :
2 ) 1 (
2 ) 1 (
0 0
h y y
h y y
S N
where yN, y0 and yS are the centroid of North, 0 and South cells in y-direction.
NW N NE yN
W 0 E y0
SW S SE yS
h h h
Figure 4.2Grid and nomenclature for uni-dimensionally stretched Cartesian grid.
4.2.2 An Accuracy and Positivity Analysis
An assessment is made to analyze the numerical methods for diffusion
equation introduced in chapter 3. The accuracy and positivity of these methods are
examined using grids of different types as shown in section 4.2.1.
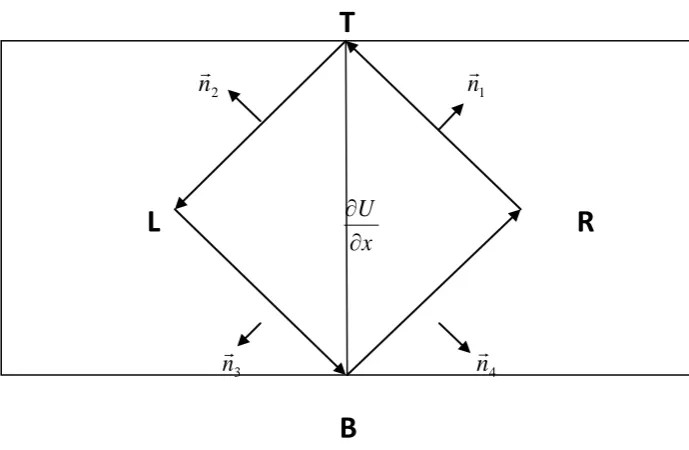
Gradient computation based on divergence theorem:
This method reconstructs the gradients at each face by applying the
divergence theorem to a diamond control volume formed by connecting the two
vertices of a face with the centroids of cells which share the interface as described in
Figure 3.1(a). According to divergence theorem, the integral around the diamond
T
n2 n1
L
x U
R
n3
n4
B
Figure 4.3Sample reconstruction, diamond path, uniform cartesian
Thus the reconstructed gradient
x U
is computed as:
) 2
2 2
2 (
1 1, 2, 2, 3, 3, 4, 4, 1, R x x B x x L x x T x x
U n n U n n U n n U n n x
U
(4.28)
where is the area of the co-volume. n1,x, n2,x, n3,x and n4,x denote the
x-components of n1
, n2
, n3
, n4
respectively, UL and UR the cell-centered
value of cell L and cell R (shown in Figure 4.3), and UT, UB the value of top vertex
and bottom vertex respectively. The value of the vertex is unknown and needed to
be determined by the set of vertex-sharing cells
i
v
N , as shown in Figure 3.1(b).
A linearity-preserving procedure derived by Homes and Connell [38] is used to
calculate the averaged value at vertex vi:
i v i v
i N
j j N
j j j
v
U U
where Uj represents the corresponding cell-centered value within the cells j,
i
N
N j
. The dimension-less weights j are defined as:
) ( ) ( 1 i i y j v
v j x
j x x y y
(4.30)
where 2 2 xy yy xx y xx x xy y xy yy xx x yy y xy x I I I R I R I I I I R I R I (4.31)
with
vi
i
N
j
v j
x x x
R 1 ) ( ,
vii
N
j
v j
y y y
R 1 ) ( , 2 1 ) (
vii
N
j
v j
xx x x
I , 2 1 ) (
vii
N
j
v j
yy y y
I , ) ( ) ( 1 i i v
i j v
N
j
v j
xy x x y y
I
(4.32)
For the uniform Cartesian grid (shown in Figure 4.1), the Gradient computation
based on divergence theorem leads to a consistent five-point stencil shown in Figure
4.4.
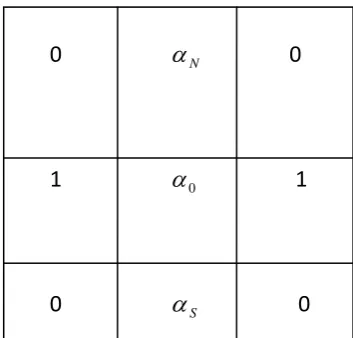
0 1 0
1 -4 1
0 1 0
Figure 4.4 Gradient computation based on divergence theorem using uniform Cartesian grid
By applying equation (3.23), the Laplace operator is found to be :
( ) 12 ) ( 1 ) ( 4 4 4 4 2 , , , , 0 y U x U h U U U U U h U