The Sentinel-4/UVN instrument on-board MTG-S
Grégory Bazalgette Courrèges-Lacoste; Berit Ahlers; Benedikt Guldimann; Alex Short; Ben Veihelmann, Hendrik Stark
ESA ESTEC
European Space Technology & Research Centre
Keplerlaan 1, 2201 AZ Noordwijk, The Netherlands; +31 71 565 5610 Gregory.bazalgette@esa.int
ABSTRACT
The Sentinel-4/ Ultra-violet/Visible/Near-Infrared (UVN) sounder instrument for geostationary orbit, as part of the Global Monitoring for Environment and Security (GMES) initiative, is presented. The geostationary orbit positioning leading to a high temporal resolution in combination with the high spatial resolution asks for demanding instrument requirements. The main requirements are introduced and their implementation are presented in this paper.
INTRODUCTION
The concept for a European geostationary atmospheric chemistry mission started in the end of the 1990’s with European initiatives to derive and define measurement concepts for tropospheric measurements from geostationary orbit. The Geostationary Scanning Imaging Absorption Spectrometer (GeoSCIA) was suggested in the beginning of this millennium1,2,3 with similar characteristics as the Sentinel-4 Ultra-violet/Visible/Near-Infrared (UVN) instrument.
The Sentinel-4 mission is part of the Global Monitoring for Environment and Security (GMES) initiative (joint initiative of the European Commission and of the European Space Agency)4,5,6, whose overall objective is to support Europe’s goals regarding sustainable development and global governance of the environment by providing timely and quality data, information, services and knowledge. The space component of GMES is procured by the European Space Agency (ESA) and comprises a series of space missions called the 'Sentinels'.
Within this GMES Space Component Programme, the objective of the geostationary mission Sentinel-4 is the monitoring of the composition of the Earth’s atmosphere above Europe. Target species, including the trace gases O3 (total vertical column and troposphere), NO2 (total vertical column and troposphere), SO2,
HCHO and (altitude resolved) aerosols shall be observed to support operational services including forecasts7,8 covering air quality protocol monitoring, and climate protocol monitoring between 2017 and 2032.
The objective of the 4/ Ultra-violet/Visible/Near-Infrared (UVN) instrument, as part of the Sentinel-4 mission, is to provide continuous monitoring of the atmospheric composition at high temporal and spatial resolution with respect to air quality, and focussing on tropospheric gases9,10 in particular.
The Sentinel-4/UVN instrument will be embarked on the geostationary Meteosat Third Generation (MTG) satellites procured by the European Space Agency (ESA) and operated by the European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT).
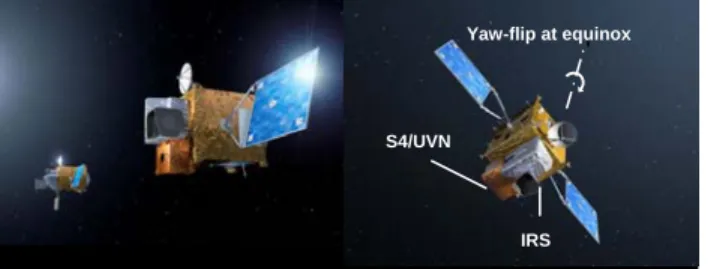
The MTG satellites consist of four imager platforms and two sounder platforms. The MTG-Imager embarks a Flexible Combined Imager (FCI) and a Lightning Imager (LI), while the MTG-Sounder embarks an Infra-Red Sounder (IRS) and the by GMES provided instrument Sentinel-4/UVN [Figure 1].
MTG-S1 planned launch is in 2019, MTG-S2 in 2027; and with the MTG-I’s first spacecraft likely to be ready for launch from 2017.
Figure 1: Left: MTG-I MTG-S; right: MTG-S with the Sentinel-4/UVN and Infra-Red Sounder (IRS).
Sentinel-4/UVN is providing data products for continuous monitoring above Europe and northern Africa [Figure 2] with additional complementary value with respect to low earth orbit predecessor missions: e.g. GOME, SCIAMACHY, OMI, GOME-2 and future missions like Sentinel 5.
Figure 2: East-west scan for continuous monitoring above Europe and northern Africa.
THE SENTINEL-4/UVN INSTRUMENT MAIN REQUIREMENTS AND IMPLEMENTATION
The Sentinel-4/UVN instrument is a hyperspectral spectrometer operating with designated spectral bands in the solar reflectance spectrum. The prime Sentinel-4/UVN parameters are listed in Table 1.
Spectral range UV-VIS 305-500 nm NIR 750-775 nm Spectral resolution
Spectral oversampling
UV-VIS ≤ 0.5 nm NIR ≤ 0.12 nm
UV-VIS & NIR ≥3.0 pixels Spatial sampling at 45 degrees
north latitude, subsatellite longitude
≤ 8 x 8 km2
Number of spatial samples (approx.):
north-south (detector pixel) east-west (meas. samples)
530 570 Operational field of view
(approx.): north-south: east-west
4°
11° (possible scan range is larger: 14°)
Yaw-flip at equinox
S4/UVN
Temporal resolution (reference
area) 60 min morning/evening <60 min Envelope 1000 x 1000 x 1500 mm3
Mass 150 kg
Power 180 W
Data rate (nominal operation) 30 Mbps
Table 1: Sentinel-4/UVN instrument parameters.
The reference area and the larger geographical coverage areas are shown in Figure 3. The east-west spatial dimension is accounted for by scanning the scan mirror from east to west in one hour. With about 570 spatial samples in the east-west spatial dimension this corresponds to about 6 seconds per 8 km spatial sample. At sunrise in the east the instrument only scans the illuminated earth, resulting in a total scan time of less than one hour. In the evening the same scenario is followed in the west. During autumn-winter the coverage area is shifted twice south by 5 degrees in order to optimise observation of illuminated areas, as shown in Figure 3. During winter-spring this is reversed.
Figure 3: Sentinel-4/UVN geographical coverage area (GCA) and reference area (RA), observation zenith angle (OZA) 75° (red curve).
The spacecraft is in geostationary orbit at a longitude of about 0 degrees. At the equinoxes the spacecraft performs a yaw-flip manœuvre in order to keep the thermal environment optimised as depicted in Figure 1. For the Sentinel-4/UVN instrument this implies that the scan mirror has to adjust the north-south axis to keep the geographical coverage area in view and reverse the east-west scan axis in order to keep scanning from east to west. In addition, the sun observations are performed in the evening rather than in the morning, or vice versa, as a result of the spacecraft yaw-flip manœuvre. The location of the Sentinel-4/UVN instrument on the MTG-S spacecraft is aimed to be such that the earth radiance, sun irradiance and thermal fields of view are clear and unobstructed and that stray light from the sun or the earth via other spacecraft components is eliminated. This is particularly important for an instrument like the Sentinel-4/UVN, for which the level-1b and level-2 data product accuracies are sensitive to small stray light contributions.
The instrument is equipped with two frame-transfer Charge Coupled Device (CCD) detectors, one for the UV-VIS wavelength range and one for the NIR wavelength range. One dimension on the CCDs corresponds to the spectral dimension, while the other dimension corresponds to the north-south spatial dimension.
In the wavelength range covered by Sentinel-4/UVN the light from the earth's atmosphere can be strongly linearly polarised, which is accounted for in the Sentinel-4/UVN design by minimising the overall instrument polarisation sensitivity in combination with the use of a weak polarisation scrambler. A refractive spectrometer design, minimising polarisation sensitivity, is the baseline with two separate spectrometers, one optimised for the Ultra-Violet (UV) and visible (VIS) wavelength range and the other for the 25 nm spectral band in the Near-Infra-Red (NIR).
The instrument's polarisation sensitivity has to be balanced with the optical quality properties on the earth, which is especially critical for an instrument in a geostationary orbit. Using a too strong polarisation scrambler will result in too much blurring of the ground sampling distance on the earth's surface. Another way of putting this is to say that the integrated energy within a ground pixel (spatial sample) will need to be contained within the required values. As such, the polarisation sensitivity, required to be less than 1%, and the integrated energy of a ground (spatial) sample are competing parameters for which a design compromise had to be found.
The instrument is equipped with two solar diffusers that are designed to minimise the introduction of spectral and spatial features in the spectra that can interfere with the retrieval of the atmospheric trace gases. The first diffuser is used on a daily basis to provide the required solar irradiance measurement data to allow calculation of the earth reflectance (earth radiance divided by solar irradiance), the second one on a monthly basis in order to monitor the radiometric degradation of the first diffuser. The solar measurements are performed at sunrise or sunset when no useful earth radiance measurements are performed.
The instrument is also equipped with a 5 Watts White Light Source (WLS) in its calibration assembly. Light Emitting Diodes (LED) are integrated close to the detectors to monitor potential radiometric degradation, detector and electronics properties such as detector bad and dead pixels, detector Pixel Response Non-Uniformity (PRNU), system non-linearity, etc..
Instrument originating spectral features, e.g. from the on-board diffusers as observed in predecessors15,16,
as well as remaining polarisation spectral features may hamper the analysis of atmospheric trace gases. There are no dedicated calibration key parameters planned for correction of the spectral features, therefore these features have to be eliminated by the instrument design. The relative spectral radiometric accuracy (peak-to-peak) are considering small spectral window widths of a couple of nm’s, which for compliance of the requirement incorporate these spectral features next to other relevant errors for the instrument response in sun calibration, earth observation modes and for earth reflectance. As example, in the UVVIS between 315 and 500 nm, the maximum relative radiometric spectral accuracy error over a spectral window width of 3 nm is required to be smaller than 0.05%.
The in-flight absolute radiometric accuracy of the Earth spectral radiance and of the Sun irradiance are required to be better than 3% with a goal of 2%. All values apply on a one sigma confidence level.
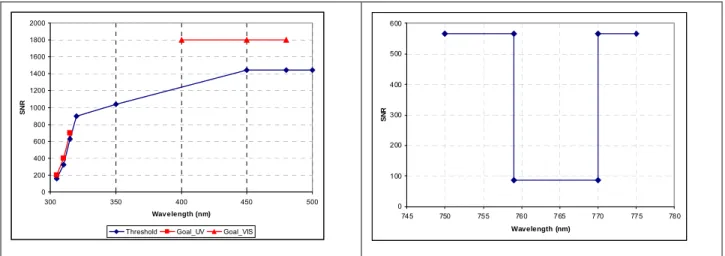
The required instrument Signal-to-Noise Ratios (SNR) are shown in Figure 4. The highest required SNR values are between 450 and 500 nm, where (tropospheric) NO2 is retrieved. The sizing of the instrument
is driven by the SNR at about 320 nm, where the radiance signals are dropping with wavelength as a result of the ozone absorption. The required SNR values for the individual solar irradiance measurements are 2000 for the UVVIS and 1130 for the NIR. The SNR performance of the instrument will be measured and verified during the on-ground performance verification measurement programme that precedes the on-ground calibration programme.
0 200 400 600 800 1000 1200 1400 1600 1800 2000
300 350 400 450 500
Wav elength (nm)
SN
R
Threshold Goal_UV Goal_VIS
0 100 200 300 400 500 600
745 750 755 760 765 770 775 780
Wavelength (nm)
SN
R
Figure 4: Signal-to-Noise Ratio requirements for radiance measurements; top UVVIS, bottom NIR.
For sensitive hyperspectral spectrometers for earth atmospheric observations such as Sentinel-4/UVN in particular the performance at level-1b (and subsequently at level-2) is a delicate balance between instrument performance/ design at level-0 and calibration plus data processing to convert the level-0 data into geophysically calibrated level-1b data. Depending on the parameter under consideration the performance at level-1b needs to be optimised by imposing more effort on any or more of the above three areas (instrument performance at level-0, calibration and data processing) in order to obtain the best final results at level-1b, that is compliant with the instrument level-1b requirements at beginning of life and end of life. In this optimisation the instrument performance at level-1b and programmatic impacts have to be weighed carefully. A more exhaustive overview of the calibration and processing aspects of S4-UVN is provided in 11.
CONCLUSIONS
This paper provides an overview of requirements for the Sentinel-4/UVN instrument embarked on the geostationary Meteosat Third Generation Satellites at the start of phase B2, C/D and support for phase E1 after successful completion of phase A/B1. The implementation of theses demanding requirements, due to the high temporal and high spatial resolution, to continuously monitor the earth’s atmosphere above Europe and northern Africa has been discussed.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the S4-UVN prime contractor, Astrium GmbH, for the provided material.
REFERENCES
1. Bovensmann, H. et al. “The geostationary scanning imaging absorption spectrometer (GeoSCIA) mission: requirements and capabilities”, Adv. Space Res., Vol. 29, no. 11, 1849-1859, 2002.
2. Court, A. et al. “GeoSCIA: The geostationary scanning imaging absorption spectrometer: optical concept and design”, Adv. Space Res. Vol. 29, no. 11, 1861-1866, 2002.
3. Bovensmann, H. et al. “The geostationary scanning imaging absorption spectrometer (GeoSCIA) as part of the geostationary tropospheric pollution explorer (GeoTROPE) mission: requirements, concepts and capabilities”, Adv. Space Res, 34, 694-699, 2004.
4. European Commission Global Monitoring for Environment and Security (GMES) homepage
http://www.ec.europa.eu/gmes.
5. European Space Agency GMES homepage http://www.esa.int/gmes. 6. GMES homepage http://www.gmes.info.
7. Golding, B.W. et al. “EUMETSAT position paper on observation requirements for nowcasting and very short range forecasting in 2015-2025” V11.02 02/12/2003.
8. Lelieveld, J. “Geostationary satellite observations for monitoring atmospheric composition and chemistry applications”, EUMETSAT, 2003.
9. European Space Agency (ESA) “GMES Sentinels 4 and 5 Mission Requirements Document” EOP- SMA/1507, 2007 (currently updated).
10. Ingmann, P. et al. “GMES Sentinels 4 and 5 – atmospheric composition monitoring from space” EUMETSAT p.52, ‘2008 EUMETSAT Meteorological Satellite Conference’, Darmstadt, Germany, 8 - 12 September 2008.
11. Ahlers, B. et al, “GMES Sentinel-4/UVN instrument concept and calibration approach”, 20th CALCON Technical Conference proceeding, Logan, Utah, USA, 29 August – 1st September 2011.