2018 International Conference on Computational, Modeling, Simulation and Mathematical Statistics (CMSMS 2018) ISBN: 978-1-60595-562-9
Hull Optimization Design for Minimum EEDI Based on DRO-MU
Yuan-hang HOU
1,*and Yuan SUN
21Dalian Maritime University, Dalian 116026, China
2Shenyang Institute of Automation Chinese Academy of Sciences, Shenyang 110000, China
*Corresponding author
Keywords: EEDI, Ship hull optimization, DRO-MU, Speed fluctuations.
Abstract. EEDI (Energy Efficiency Design Index), which was a mandatory provision pointing at
marine greenhouse gas emission, became a significant factor in ship hull form design. EEDI is closely related to the ship speed, which was used to be seen a determined value in conventional design stage. However, there are always fluctuations of speed in the actual sailing, so it's more reasonable to treat speed as a random variable, and from a long-term statistical point of view, the uncertainty of expectation and variance of the probability distribution should also be concerned. In order to solve the ship hull optimization problem for minimum EEDI with random variable, distributional robust optimization method under moment uncertainty is introduced in this research. Robust optimal model with NP-hard is transformed into a deterministic semi-definite programming one by Lagrange duality principle. Results verified the new method with fine rationality and superiority.
Introduction
EEDI (Energy Efficiency Design Index), which was proposed by IMO in 2011 [1], was an of significance index for ship energy efficiency, and was officially entered into force in January 1, 2013. EEDI is closely related to the ship speed, which is normally set as a constant in calculation [2, 3]. However, fluctuation of speed is unavoidable in the actual navigation [4], then error of result would be generated if still considering a constant speed. Although the error is small in most cases, but in the optimization process, continuous iteration and mutual coupling may cause the final result to have a large deviation. Apparently, it’s more reasonable to set speed as a form of uncertainty random variable in calculation, and the uncertainty of expectation and variance of its distribution should be considered. This idea and research is a blank space in the ship design field.
As a frequently-used method for uncertainty problem, robust optimization method assumes that the uncertainty parameters are composed of a set [5], and a min-max optimization model pointing at the worst case scenario in the set is established. However, this kind of method does not utilize the available probability statistics. DRO-MU (Distributional Robust Optimization under Moment Uncertainty) [6] method considers the uncertainty of moments of random variables, assumes the expectation and variance as a box or ellipsoid form of uncertainty set, robust optimization model is established, and can be transformed into a deterministic semi-definite programming one by Lagrange duality principle. The application in power system verifies the effectiveness of this method [7].
Dro-Mu Method
Robust optimization is a method to solve the internal structure and the external environment with uncertainty, in which, the uncertainty of parameters in constraints or objective functions is usually oriented. Conventional robust optimization model is [5]:
) ,..., 1 ( , 0 ) , ( sup . . ) , ( sup min m k g t s f k R ξ x ξ x S ξ S ξ x (1) Where: x is design variable, ξ is random variable, S is uncertainty set (distribution space of random variable, namely); f is objective function, g is constraints. Robust optimization method describes the uncertainty parameter in the function as a box or ellipsoid form of uncertainty set.
DRO-MU method combines the robust optimization and stochastic programming, based on the uncertainty set of two important moments (expectation and variance) of random variables, a Min-Max optimization can be carried out, the model is as following:
)] , ( [ max
min xξ
xR FDE f (2) where: F is distribution of random variable ξ, D is uncertainty set of ξ, E represents the expectation.
Eq. (2) is a typical NP-hard Min-Max problem, which is hard to solve directly, and can be transformed into a derministic semi-definite programming one by Lagrange duality principle as an effective solution way.
Calculation Formulas
EEDI Formula and Parameter
EEDI is expressed by the ratio of CO2 emissions and quantity of shipments, and is related to the ship's fuel consumption, engine power, auxiliary power, energy-saving equipment, speed, tonnage and other factors [2]. Its calculation formula is shown as in Eq. (3):
w i eff PTI AE ME f v Capacity f E E E E EEDI (3) where:
neffi effi eff i FME ME eff ME FME neff i i AEeff i eff nPTI i i PTI n j j PTI AE FAE AE AE nME
i MEi FMEi MEi n j j ME SFC C P f E SFC C P f P f E SFC C P E SFC C P f E
1 () () 1 ) ( ) ( 1 ) ( 1
1 () () () 1
eff
f
[image:3.612.203.412.122.248.2]is innovation factor, and is taken 1.0 for waste heat recovery unit, and for other energy or technology, it should be evaluated by classification society; fw is wind wave correction factor.
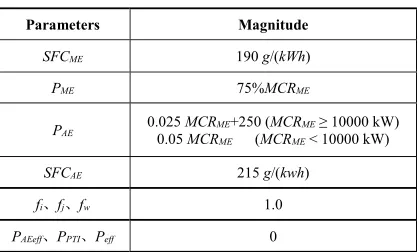
Table 1. Parameter magnitude in EEDI formula.
Parameters Magnitude
SFCME 190 g/(kWh)
PME 75%MCRME
PAE 0.0250.05 MCRMCRME+250 (MCRME ≥ 10000 kW) ME (MCRME < 10000 kW)
SFCAE 215 g/(kwh)
fi、fj、fw 1.0
PAEeff、PPTI、Peff 0
Upon substitution of magnitudes in Tab.1 into Eq. (2), the simplified EEDI formula is obtained as Eq. (5):
PC Capacity
R C
v Capacity
MCR MCR
C
EEDI t
F ME ME
F
142.5 215(0.05 ) 0.5144 153.25
(5) where: MCRME is power rating of main engine, (kW); Rt is travelling resistance, (kN); PC is
propulsive coefficient; Capacity is deadweight, (t), got by Eq. (6):
m o
h
m o h t
W D B L C C
W W W W
Capacity
) ( ) (
(6) where: Δ is displacement, (t). Wt is light weight, (t), which is divided into hull weight Wh, outfit
weight Wo and electromechanical weight Wm. Wh and Wo can be estimated by the principal
dimensions: waterline length L (m), waterline width B (m) and depth D (m). Correspondingly, Ch
and Co are relevant coefficients, which are usually empirical valued. Electromechanical weight Wm
can be set as a fix value referred to parent type. In consideration of the following research case, these are defined as: Ch=0.43, Co=0.31, Wm=671(t) in this study.
Ship Resistance
According to Hughes’ point, total resistance can be split into wave making resistance Rw, frictional
resistance Rf , and viscous pressure resistance Rpv , namely:
f pv
w pv f w
t R R R R v SC C
R 2
2 1
(7) where: S is wet surface area.
Frictional resistance coefficient Cf uses 1957ITTC formula; the viscous pressure resistance coefficient using Baptista formula, such as Eq. (8) as follows:
r m m pv
f
L A S A C
C
2 09 . 0
) 2 Re (lg
075 . 0
2
Optimization Model
Design Variables
Taking Wigley hull as an example, the design variables are identified by whole ships’ principal dimensions and the overall shape of a ship, in which the principal dimensions are represented by the waterline length L, waterline width B, draft T. The modification of the hull shape can represent by the original data points multiplied hull modification function, as shown in Eqs. (9)- (10):
) , ( ) , ( ) , ( ) , ( ) , ( ) , ( 0 0 z x z x y z x y z x z x y z x y a a f f (9)
2 0 0 2 0 max 0 sin sin 1 ) , ( n m n mmn z T
z z x x x x A z x
w
(10) where: yf(a)(x,z) represents before (after) half of the lateral data points of the hull after changed, both in the mid ship-section of the interface; (x,z) is modification function of hull form; Amn is to characterize the magnitude of the control variables ,in this paper m, n=1,2,3.
Initial value and range of design variables is shown as in table. 2. Table 2. Initial Value and Range of Design Variables. Design
variables L/m B/m T/m Amn(m,n=1,2,3) Initial
value 2 0.2 0.125 0 Changing
range 1.6~2.4 0.16~0.24 0.1~0.15 0~0.15
Design Variables
Non-significant changing of displacement is taking as constraint condition:
0 0 (11) Where: and 0 are optimal and initial hull form’s displacement, which can be calculated
utilizing Simpson method; is a small value, to ensure that the displacement volume of optimized ship is not below the lower limit.
After integrating the constraint condition into the optimization objective, minimum EEDI optimization model is obtained, as in shown in Eq. (12):
v Capacity v R PC v EEDI f P f f f opt t p p 53750 ) ( 47 . 287 ) ( ) ( ])) ) 0 / ) (( [ , 0 (max( ) ( ) ( ) ( min 2 0 0 x x x x x x (12) Where: x is vector of design variables, x{L,B,T,Amn}, (m,n1,2,3).
Dro-Mu Expression and Duality Transformation
Uncertainty Set of Speed Probability Distribution
i T i i
i i
T i
σ γ μ
v
μ
v E
γ μ
v E
σ μ
v E
S v P D
2 1 1
] ) )( [(
] ) ( [ ] ) ( [
1 ) (
(13) where: μi is expectation column vector of incoming flow velocity random variable v, and σi is
variance vector of v. 1 is control parameters of expectation ellipsoid uncertainty set, which meets
0
1
; 2 is control parameters of variance semi-definite cone uncertainty set, which meets 21.
DRO-MU Expression of Target Function
DRO-MU is set based on random programming, as the speed v is a random variable, the expectation of objective function should therefore be got first. After that, a min-max problem is built via robust optimization principle, as shown:
min [ ( , )]
'
' max min
v f E f
f opt
p p
p D F
x
x x
(14) where: fp' is the expectation of objective function including random variables. D is uncertainty set of random variables’ moment.
Dual Transformation
Eq. (12) is a typical NP-hard Min-Max problem, which is hard to solve directly, and can be transformed into a deterministic semi-definite programming one by Lagrange duality principle as an effective solution way [9]:
) 2 ( )
(
, )
, ( . . min
2 / 1 1 T T 2
T T 0 , , ,
i i
i i i i
i t
r q Q
t
v v v v U r t s
t r
Qμ
q
σ
q
μ
Q
μ μ σ
S L q Q x
(15) where: Q、q are dual variables, which meet Q0; r、t are slack variables; ꞏ indicates Frobenius product; indicates semi-definite. Namely, via duality principle, robust optimization with random variables is transformed to a minimum problem of slack variables r and t, which can be easily calculated and solved.
Conclusion
The corresponding parameters are set to: propulsive coefficient PC is 0.5. Weight is 0.5, penalty factor is 1000, and threshold is 0.1. Particle swarm optimization (PSO) is used to solve Eq. (18), where population size is defined as 100, and number of iterations is 500.
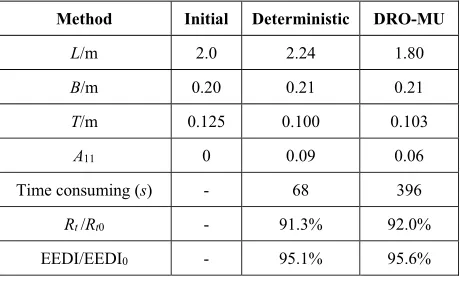
[image:5.612.192.422.610.751.2]After optimization calculation, optimal hull lines result with minimum EEDI is got. For comparison, deterministic optimization is also done with a constant speed, 30 knots. Results are shown in Tab.3.
Table 3. Comparison of Optimization Results.
Method Initial Deterministic DRO-MU
L/m 2.0 2.24 1.80
B/m 0.20 0.21 0.21
T/m 0.125 0.100 0.103
A11 0 0.09 0.06
Time consuming (s) - 68 396
Rt /Rt0 - 91.3% 92.0%
As is shown above, both deterministic and DRO-MU optimization can depress resistance and EEDI among the constraint range. However, reason for the DRO-MU result a little worse than deterministic is that, the former considered the influence of the speed’s random fluctuation and the uncertainty of its moment, and is closer to the real condition.
Therefore, taking the uncertainty influence of the speed’s fluctuation into consideration, the minimum EEDI ship hull lines design via DRO-MU, could effectively improve the performance and energy efficiency, and because is closer to the real condition, has the rationality and superiority.
Acknowledgment
This work is supported by the National Natural Science Foundation of China (Grant No. 51609030) and Fundamental Research Funds for the Central Universities of China (Grant No. 3132018205, 3132016339).
References
[1] Liu Y.L. Introduction and Study of New Ship Energy Efficiency Design Index (EEDI) [J]. Shipbuilding of China, 2009, 50(4): 165-170.
[2] Zou Y. Research on optimization method for high performance vessel based on EEDI energy efficiency design index [D]. Dalian: Dalian Maritime University, 2014. 5-15.
[3] Cheng H.R., Liu X.D., Feng B.W. Study on multidisciplinary optimization method for hull forms design [J]. Shipbuilding of China, 2014, 55(1): 76-82.
[4] Ding J. Uncertainty analysis of ship velocity measurement in sea trial considering ship velocity algorithm [J]. Shipbuilding of China, 2007, 48(2): 144-148.
[5] Dimitris B., Dessislava P., Melvyn S. Robust linear optimization under general norms [J]. Operations Research Letters, 2004, 32(6): 510-516.
[6] Delage E., Ye Y. Y. Distributional robust optimization under moment uncertainty with application to data-driven problems [J]. Operations Research, 2010, 58(3): 595-612.
[7] Zhou R.J., Min X.B., Tong X.J., etc. Distributional robust optimization under moment uncertainty of environmental and economic dispatch for power system [J]. Proceedings of the CSEE, 2015, 35(13): 3248-3256.
[8] Zhang B.J., Zhou Y. High speed patrol boat resistance prediction and hull form optimization [J]. Naval Architecture and Ocean Engineering [J], 2013, 94(2): 1-4.