2017 2nd International Conference on Computer, Mechatronics and Electronic Engineering (CMEE 2017) ISBN: 978-1-60595-532-2
Investigation and Analysis of Mechanical Platform Optimization for
MEM Type 3D Printer
Zhen-hai HUANG
1, Ting-chun SHI
1, Wen-cai XU
2and Xiu-yan YUE
11
Hangzhou Dianzi University, Hangzhou, China 2
Anrui Medical Devices (Hangzhou) Co., Ltd., Hangzhou, China
Keywords: 3D printer, Software modelling, Finite element, Optimization analysis.
Abstract. To improve the efficiency and precision of the MEM300 granule feeding 3D printer, the motion platform of printer was modelled, and the modal frequency was solved using the ANSYS software. The speed parameters of polarization motor was reasonably set according to the frequency range in modal analysis and the speed of polarization motor measured. Then the professional mechanical simulation software was used to sample the polarization motor speed, the resulting speed parameters were taken as the driving energy, the harmonic response analysis was performed for the entire motion platform. Based on the harmonic response analysis results of mechanical platform, the polarization motors in different speed models are replaced, and the entire mechanical movement was verified. The experiment found that the feeding efficiency of the printer system is not proportional to the rate of polarization motor, and the reasonable velocity is between 38 and 40r/s. When the energy of polarization motor is too high, the vibration in hopper and feeding column will be increased. The method provides a good solution to solve the stability of the mechanical structure.
Introduction
The reasons affecting the accuracy of 3D printer can be divided into the accuracy of pre-processing hierarchical algorithm, accuracy of mechanical control algorithm, and stability of modeling machine [1]. MEM300 printer is the 3D printer via extrusion forming manufactured by Beijing Yinhua Company in the past, which is one of the rare granule feeding 3D printers in the market. The cost of material acquisition is relatively low compared to the commercially available filamentous materials. Based on the existing MEM300 printer, it is found in the actual experiment that there is uneven feeding phenomenon in the printer feeding system; with the vibration of polarization motor in feeding system, there is varying degrees of vibration in the 3D printer hopper, feeding spoon and other parts. The accuracy and stability of 3D printer modeling platform are important factors affecting the accuracy of printer. The structure of the3D printer modeling platforms in different types has great difference [2, 3, 15, 18]. This paper mainly analyzes the effects of the polarization motor speed on the stability of printer structure and feeding from the analysis of mechanical parts.
Preliminary Analysis of Model
Establishment of Model
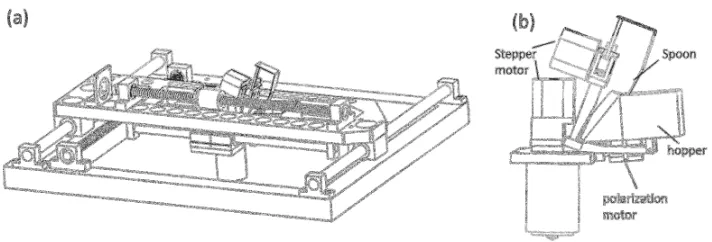
Figure 1. (a)Simplified model and (b) Nozzle model.
The printer feeding system is shown in Figure 1.b. The nozzle feeding mechanism includes hopper, spoon and polarization motor. The polarization motor is located below the hopper, and It mainly provides the energy needed to transport the granules. When the spoon moves to the bottom, the spoon will load and move to the discharge port on the hopper. The polarization motor rotates to vibrate the spoon and send the granules out of the discharge port; it enters the extruded part of nozzle along the hopper; driven by the stepper motor, it extrudes the silk threads.
It can be known from the working principle of printer that the main energy in the printing process comes from the polarization motor, and the energy affects in the rotation process of polarization motor affects the efficiency of feeding as well as the stability of the entire printer system. We mainly focus on the effects of energy of printer polarization motor on the overall performance of printer.
Finite Element Analysis of Model
[image:2.612.127.483.80.201.2]Model material settings. The material used for this type of printer is mainly the structural steel (base, optical axis, etc.), aluminum alloy (beam, fixed frame), copper alloy (nozzle, heating wire), PMMA (hopper, support between hopper and the polarization motor). According to the literature [4, 5, 6], the main material properties as shown in Table 1:
Table 1. Material properties.
Property Density(g/cm^3) Poisson`s Ratio Young`s Modulus(Mpa)
Aluminum Alloy 2.77 0.33 71000
Copper Alloy 8.3 0.34 110000
PMMA 1.18 0.4 3500
Structural Steel 7.85 0.3 208000
Contact surface type setting and grid optimization. The contact types in finite element software ANSYS is divided into the fixed contact, non-separation contact, non-friction contact, and friction contact [7, 8, 9, 16]. The accurate setting of contact modes between various parts is more important for the accurate analysis of structure performance. Based on the movement process of printer, the contact type of each part of printer can be divided into fixed contact and friction contact. The fixed contact is mainly distributed in the bolt-fixed surface; the friction contact is mainly distributed in the bearing, guide optical axis and screw contact. According to the relevant literature, the friction coefficient is set as 0.002.
The mesh types are divided into free mesh, tetrahedral mesh and hexahedral mesh. The model of 3D printer adopts the hexahedral mesh, and the average value of model grid after optimization can be up to 89.6%.
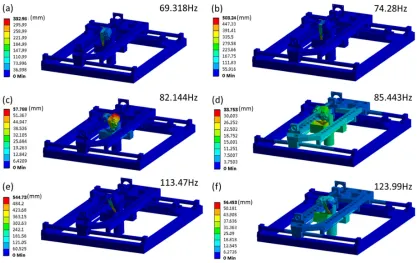
Modal analysis is to explore the main mode of vibration of printer [12, 13, 15, 20], which has an important reference for the reasonable choice of vibration excitation range for polarization motor. The main frequency and mode of modal analysis takes the first six orders, as shown in Figure 2:
Figure 2. Modal analysis cloud.
It can be seen from the results of modal analysis that the main vibration sources in the first two inherent frequencies are mainly the feeding spoon, showing the spoon swing forward and backward. In the third-order inherent frequency, the motor in the upper part of hopper has serious twist; in the sixth-order inherent frequency, the whole nozzle system and motion optical axis have large vibration phenomenon. According to the analysis, the excitation range posed by the polarization motor should be less than 65Hz in the working process of printer, making the excitation range away from the inherent frequency of printer as far as possible.
Exploratory Analysis
Actual Sampling Test
Figure 3. (a)Hopper acceleration sampling and (b) Amplitude - frequency characteristic curve.
In order to obtain the periodic data on the vibration energy better from the acceleration curve, discrete Fourier transform is performed for the acceleration data at the hopper to obtain the acceleration amplitude-frequency curve in the frequency domain, as shown in Figure 4(b); the energy is mainly concentrated in 35-38hz.
[image:4.612.130.478.70.220.2]The rotation speed of polarization motor in the working process is measured using the speed measurement instrument, used as a side reference for acceleration measurement. After multiple measurements, the average is taken and the speed is measured for 10 groups; the data are shown in Table 2:
Table 2. Speed sampling.
Grouping 1 2 3 4 5 6 7 8 9 10
speed(RPM) 2167.7 2107.6 1985.1 1956.9 1910.2 2116.3 2100.2 1994.0 1961.5 2035.6
The speed of polarization motor in the printer feeding, 2122.3rpm and 35.37r/s, was obtained from the measured data. It can be seen that the speed of polarization motor is roughly the same as the vibration acceleration frequency of various parts of the printer; in other words, in the working process of printer, the main factors affecting the stability of printer come from the energy provided by the polarization motor, regardless of the mechanical platform accuracy.
Polarization motor provides the main power for the granule feeding of feeding system; when the vibration energy is too large, it will cause the instability of other parts of mechanical platform, affecting the molding process and molding parts; on the contrary, when the vibration energy is too small, it will not be enough to let the granule enter the nozzle and model with the spoon vibration, affecting the feeding of raw materials. Therefore, investigating a reasonable polarization motor speed has a significance in the stability of printer shape.
Speed Parameter Sampling Analysis and Simulation Analysis
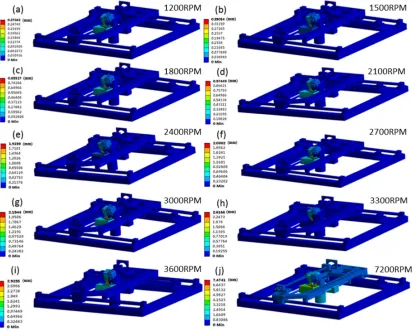
[image:4.612.80.534.366.395.2]the maximum deformation is mainly concentrated at the tip of spoon; when it is between 1200rpm and 2100rpm, the deformation increment in the response analysis is small; when it is between 2100rpm and 2400rpm, the response is increased greatly, suggesting the printer system has greater energy gain under this speed response; when it is between 2400rpm and 3600rpm, the maximum deformation of response increases from 1.9338mm to 2.9235mm, and the growth is also significant. But the cumulative deformation of drive motor at the spoon will also gradually increase from 0.1mm to 0.4mm, affecting the stability of the entire printer system, even the service life of chute supporting the spoon feeding motor.
Figure 4. Response cloud diagram of polarized motor at different sampling speeds.
Discussion and Analysis of Experimental Validation
According to the experimental results, the motor with different speeds is used for test. The vibration of mechanical structure beam and hoppers is observed under the action of different polarization motors, as well as the printer feeding efficiency. The feeding efficiency of the printer is measured at 50 times of the feeding spoon and the number of granules.
The motor is measured and the speed is between 1150 and 3000rpm. The speed actually measured is shown in Table 3:
Table 3. Motor type speed measurement.
Motor 1 2 3 4 5 6
Speed (RPM) 1187.8 1511.5 1773.6 2122.3 2379.3 2911.2
[image:5.612.114.498.658.694.2]The different motors are replaced, and the number of granule is summarized during the 50 times of spoon feeding. The capacity of spoon is designed in accordance with one granule each time, occasionally two granules. The feeding curve under different motor speeds is shown in Figure 5.
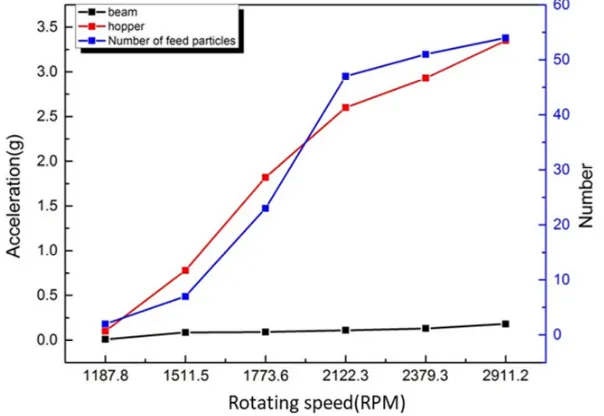
Figure 5. The maximum acceleration of the different parts of the sampling and 50 times the feed material determination.
It can be seen from the analysis of maximum acceleration curve that with the speed increases, the energy in the hopper and beam is also increased, which is consistent with the results of harmonic response analysis. The power of feeding mainly comes from the vibration energy of polarization motor. From the feeding curve, it can be seen that when the speed of motor is 1200rpm, the energy of polarization motor is not enough to feed successfully. With the increase of polarization motor speed, the number of granule feeding is also increased. When the speed is 2379.3rpm, the number of granule feeding in polarization motor can be up to 51, meeting the minimum feed requirement. With the further increase in the speed of polarization motor, the number of granule feeding will be greater than or equal to 50, meeting the feeding requirements. At the same time, with the increase in energy of polarization motor, the incentives in hopper and beam are also increased, which has a greater impact to the stability of the entire printer structure system. In other words, the more suitable speed of polarization motor for the printer is between 2200rpm and 2400rpm. The polarization motor with the speed of 2379.3rpm is replaced to ensure the stable feeding performance in the operation, and almost each granule is fed. Finally, the molding effect and surface density of prints are improved in different degrees. It is close to the original polarization motor speed 2122.3rpm, so it can be seen from the analysis results that there is no difference in the deformation of beams, hoppers and other parts.
Summary
Based on the analysis results, SolidWorks is used to simulate the vibration of polarization motor of the printer, and the simulation data is input into the ANSYS for response analysis; the results obtained are compared to the actual experimental results, which have great practical significance. Response analysis can identify the changes in practical response of overall structure of printer to the speed and the response result variation when the speed of polarization motor is changed. To get more accurate and appropriate speeds, the actual feeding status of the printer should be combined.
Acknowledgement
2017C01019, China. I would like to thank Professor Ting-chun SHI for guiding my thesis writing and academic research. Thanks to the people who helped me during the writing of the essay.
Reference
[1] G. Cesaretti, E. Dini, X. De Kestelier, V. Colla, and L. Pambaguian, Building components for an outpost on the Lunar soil by means of a novel 3D printing technology. Acta Astronautica 93 (2014) 430-450.
[2] T.L.L.W. Yao Jiang, Kinematic error modeling and identification of the over-constrained parallel kinematic machine. Robotics and Computer–Integrated Manufacturing 49 (2017) 105-119.
[3] D.N.F.L. T. Csanádi, Mechanical Properties of Hard W-C Coating on Steel Substrate Deduced from Nanoindentation and Finite Element Modeling. Experimental Mechanics 57 (2017) 1057– 1069.
[4] C. Yue, L. Zhang, S. Liao, J. Pei, H. Gao, Y. Jia, and X. Lian, Research on the dynamic recrystallization behavior of GCr15 steel. Materials Science and Engineering: A 499 (2009) 177-181.
[5] Y.X.C.N. Feng Wang, Effects of pore connectivity and microstructure on mechanical performance of ZrO2 scaffolds and PMMA-infiltrated ZrO2 composites. Journal of Alloys and Compounds 728 (2017) 189-195.
[6] R.V.C.S. Zahra Silvayeh, Influence of Filler Alloy Composition and Process Parameters on the Intermetallic Layer Thickness in Single-Sided Cold Metal Transfer Welding of Aluminum-Steel Blanks. Metallurgical and Materials Transactions A (2017) 1-11.
[7] T. Horii, S. Kirihara, and Y. Miyamoto, Freeform fabrication of superalloy objects by 3D micro welding. Materials & Design 30 (2009) 1093-1097.
[8] P. Zhu, Z.X. Lei, and K.M. Liew, Static and free vibration analyses of carbon nanotube-reinforced composite plates using finite element method with first order shear deformation plate theory. Composite Structures 94 (2012) 1450-1460.
[9] Y. Li, J. Wang, X. Liu, and L. Wang, Dynamic performance comparison and counterweight optimization of two 3-DOF parallel manipulators for a new hybrid machine tool. Mechanism and Machine Theory 45 (2010) 1668-1680.
[10] D. Moens, and M. Hanss, Non-probabilistic finite element analysis for parametric uncertainty treatment in applied mechanics: Recent advances. Finite Elements in Analysis and Design 47 (2011) 4-16.
[11] N. Valizadeh, S. Natarajan, O.A. Gonzalez-Estrada, T. Rabczuk, T.Q. Bui, and S.P.A. Bordas, NURBS-based finite element analysis of functionally graded plates: Static bending, vibration, buckling and flutter. Composite Structures 99 (2013) 309-326.
[12] B.M. Tymrak, M. Kreiger, and J.M. Pearce, Mechanical properties of components fabricated with open-source 3-D printers under realistic environmental conditions. Materials and Design 58 (2014) 242-246.
[13] C.C. Hong, C.L. Chang, and C.Y. Lin, Static structural analysis of great five-axis turning– milling complex CNC machine. Engineering Science and Technology, an International Journal 19 (2016) 1971–1984.
[15] Y.X.T.Q. Shanling Han, Design and Analysis of Fused Deposition Modeling 3D Printer Nozzle for Color Mixing. Advances in Materials Science and Engineering (2017) 1-12.
[16] E.Z.G.L. E. Carrera, Finite element models with node-dependent kinematics for the analysis of composite beam structures. Composites Part B 132 (2017) 35-48.
[17] B. Berman, 3D printing: The new industrial revolution. Business Horizons 2 (2012) 155-162.
[18] H. Thai, and T.P. Vo, A new sinusoidal shear deformation theory for bending, buckling, and vibration of functionally graded plates. Applied Mathematical Modelling 37 (2013) 3269-3281.
[19] G.Z.Y.H. Youmin Rong, Study on deformation and residual stress of laser welding 316L T-joint using 3D/shell finite element analysis and experiment verification. Int J Adv Manuf Technol 89 (2017) 2077-2085.